Изобретение относится к области машиностроения и может быть использовано при проектировании трициклов.
Известен трицикл, представляющий собой трехколесное транспортное средство с колесами, симметричными по отношению к средней продольной плоскости, максимальная конструктивная скорость более 50 км/ч, двигатель с рабочим объемом более 50 см3 [1]. Недостатком этого трицикла является меньшая по сравнению с четырехколесным транспортном средством боковая устойчивость против опрокидывания, которая особенно проявляется в горных условиях эксплуатации.
Известен также трицикл с наклоняющимся вместе с передним управляемым колесом кузовом в сторону поворота, который обеспечивается системой Dynamic Vehicle Control (DVC), автоматически выбирающей текущий угол наклона кузова, исходя из угла поворота управляемого колеса и скорости движения [2]. Основным недостатком этого трицикла является дороговизна механизма наклона.
Задачей изобретения является создание простого, надежного, дешевого транспортного средства небольшой грузоподъемности для фермерских хозяйств горной зоны, обладающего повышенной устойчивостью против бокового опрокидывания.
Согласно изобретению в трицикле с симметричным расположением задних ведущих колес и передним управляемым колесом кузов в виде грузовой платформы и рама вместе с управляемым колесом, как одно целое, может наклоняться относительно заднего моста в поперечном (боковом) направлении, причем рама с одной стороны шарнирно при помощи двух тяг связана с кожухом заднего моста, который с другой стороны шарнирно связан с грузовой платформой, механизм наклона которой представляет собой электролебедку, барабан которой закреплен на грузовой платформе, на ней же закреплены блоки, огибаемые левым и правым тросами лебедки, концы троса закреплены в левой и правой частях кожуха заднего моста, управление электролебедкой осуществляется автоматически в зависимости от угла косогора или при помощи пульта управления электролебедкой, установленного у левой рукоятки руля, и представляет собой тумблер с тремя положениями - поворот влево, вправо, нейтраль, левый и правый концы троса лебедки закреплены в крайне левом и крайне правом частях кожуха заднего моста, левый и правый блоки расположены над местами крепления концов троса к кожуху заднего моста, концы троса лебедки прикреплены к кожуху заднего моста при помощи скоб или серег, кузов может фиксироваться в вертикальном положении замком, связанным с системой управления, а также в разных положениях механическим устройством.
Между основными геометрическими параметрами трицикла соблюдается условие
B≥2hL/a=(2h)2/a,
где: B, L - колея и база трицикла, L=2h; a - расстояние центра масс от оси переднего колеса; h - высота центра масс.
Устойчивость трицикла при движении по косогорам зависит от стабилизации его грузовой платформы, которая достигается при помощи механизма наклона. Устойчивость трицикла в транспортном режиме зависит от критических скоростей по заносу и опрокидыванию. Устойчивость тем выше, чем больше критическая скорость прохождения поворота трициклом. Кроме критических скоростей, устойчивость характеризуется поворачиваемостью. С учетом эластичности шин положение центра масс решающим образом влияет на все параметры устойчивости трицикла - критические скорости, траекторию, поворачиваемость. Используя новые знания [3-7], можно на стадии проектирования таким образом скомпоновать (взаимно расположить его элементы) трицикл, чтобы во время эксплуатации он обладал максимально возможной устойчивостью благодаря оптимальной взаимосвязи между его параметрами, влияющими на критические скорости по заносу и опрокидыванию, а наличие механизма наклона - дополнительно повысить устойчивость против опрокидывания.
Выполнение трицикла с возможностью наклона грузовой платформы и рамы вместе с управляемым колесом, как одной целой, относительно заднего моста, позволяет изменять их взаимное расположение в пространстве, что дает возможность наклонять грузовую платформу на косогоре (поперечном уклоне) так, чтобы сохранить ее горизонтальное положение и тем самым устойчивость против опрокидывания [3-7].
Шарнирное соединение рамы с задним мостом при помощи двух тяг с шарнирами на концах и одного шарнирного соединения позволяет наиболее просто изменять их взаиморасположение.
Использование электролебедки в качества основного элемента механизма, обеспечивающего изменение взаиморасположения рамы и заднего моста, позволяет с наименьшими затратами механизировать процесс наклона.
Автоматизация управления электролебедкой механизма наклона трицикла позволяет повысить безопасность и комфортабельность езды.
Управление электролебедкой при помощи пульта позволяет уменьшить стоимость механизма наклона.
Закрепление и расположение в крайне левом и крайне правом положениях концов троса лебедки и блоков позволяет повысить коэффициент полезного действия механизма наклона.
Фиксация грузовой платформы в вертикальном или в ином положении позволяет разгрузить трос механизма наклона.
Соблюдение зависимости B≥2hL/a, где B, L - колея и база трицикла; a, h - расстояние от оси переднего колеса и высота центра масс трицикла, является условием недопущения поперечного опрокидывания трицикла до наступления заноса [6].
Соблюдение зависимости L≥2h является условием недопущения продольного опрокидывания трицикла при разгоне и торможении [6].
Следовательно, выражение B=(2h)2/a является условием недопущения продольного и поперечного опрокидывания до наступления заноса. Тут же поясним, что при движении трицикла может произойти занос (боковое скольжение колес) или его опрокидывание, вызываемые возникающей во время поворота центробежной силой инерции. Рассматривая раздельно занос и опрокидывание трицикла можно заметить:
- занос, если он не заканчивается опрокидыванием из-за встретившихся препятствий или выходом на полосу встречного движения и последующим столкновением с встречным транспортом, не представляет опасности ни для людей, ни для трицикла и дорожных сооружений;
- опрокидывание, как правило, приводит к тяжким последствиям как для людей, так и для сохранности трицикла, груза и дорожных сооружений.
Сравнение последствий заносов и опрокидываний показывает, что опрокидывание трицикла приводит к материальным потерям, часто к увечьям и смерти людей, тогда как боковое скольжение может завершиться благополучно. Отсюда вытекает, что для обеспечения более безопасного движения трицикла необходимо, чтобы в его конструкцию были заложены параметры, не допускающие его опрокидывания до наступления бокового скольжения, так как опрокидывание приводит к более тяжким последствиям, т.е. из двух зол, которые могут произойти, выбрать наименьшее [6].
Следует особо отметить, что занос можно устранить, сбросив скорость трицикла, и если боковое скольжение начинается раньше опрокидывания, то это в какой-то степени служит сигналом для принятия мер по его устранению и недопущению последующего опрокидывания.
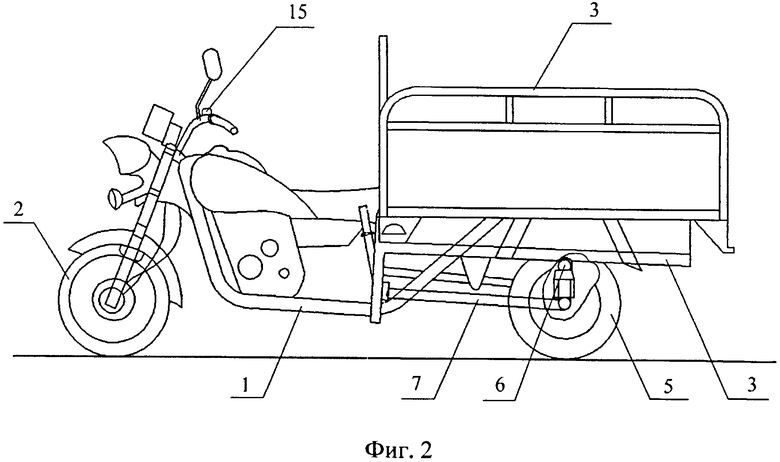
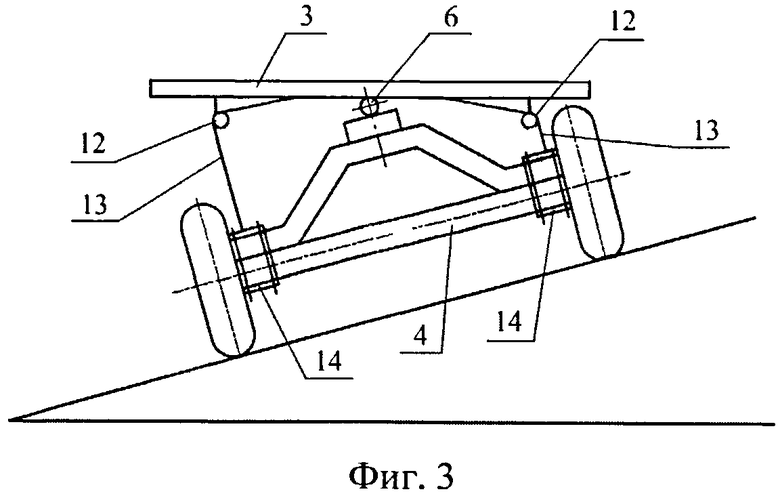
Сущность изобретения поясняется чертежами: на фиг.1 изображена схема трицикла с наклоняющимся кузовом в виде грузовой платформы, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.3 - то же, вид сзади.
Трицикл содержит раму 1 (фиг.1 и 2), связанные с ней переднее управляемое колесо 2 и кузов в виде грузовой платформы 3, которые как одно целое могут наклоняться поперечно относительно заднего моста 4 с эластичными колесами 5 на концах благодаря шарниру 6, связывающему раму 1 с задним мостом 4 и тягами 7, с шарнирами на концах, связывающими раму 1 с кожухом заднего моста 4. Барабан 8 электролебедки, закрепленный на каретке 9 с возможностью вместе с ней перемещений вдоль стержней 10, которые ограничены жесткостью пружин 11, надетых на стержни 10, и их длиной до соприкосновения витков, стержни 10 жестко прикреплены к грузовой платформе 3, через блоки 12 (фиг.3) связан концами троса 13 с кожухом заднего моста 4, к которому они прикреплены серьгами 14. Такое подвижное соединение лебедки с барабаном 8 к платформе 3 является компенсатором несоосности шарнира 6 и барабана 8.
Трицикл в случае нахождения или движения по косогору (поперечному уклону) изменяет положение грузовой платформы следующим образом. Автоматически или воздействием на пульт 15 управления электролебедкой устанавливается горизонтальное или наклонное к направлению возрастания высоты косогора положение грузовой платформы для предотвращения опрокидывания путем одновременного наматывания и разматывания тросов 13 в требуемую сторону.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2022810C1 |
| ГРУЗОВОЙ ПРИЦЕП | 1993 |
|
RU2073619C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ ОТСЫПКИ ВЫСОКИХ ОТВАЛОВ ПРИ АВТОМОБИЛЬНОМ ТРАНСПОРТЕ | 2000 |
|
RU2168021C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАПАСНОГО КОЛЕСА НА ТРАНСПОРТНОЕ СРЕДСТВО | 2023 |
|
RU2816380C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2002 |
|
RU2314961C2 |
| Мусоровоз | 1983 |
|
SU1094810A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ СУПЕРКОНТЕЙНЕРОВ С РАЗРЯДНЫМИ И ЭКОЛОГИЧЕСКИ ОПАСНЫМИ ГРУЗАМИ | 2013 |
|
RU2550940C1 |
| Самосвал с трёхсторонним опрокидыванием кузова | 2018 |
|
RU2710954C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ВАГОН ДЛЯ ОДНОРЕЛЬСОВОЙ ЖЕЛЕЗНОЙ ДОРОГИ НА СТОЛБАХ | 1928 |
|
SU22044A1 |
Трицикл имеет симметричное расположение задних ведущих колес и переднее управляемое колесо. Кузов трицикла в виде грузовой платформы и рама вместе с управляемым колесом могут наклоняться, как одно целое, относительно заднего моста в поперечном направлении. Рама с одной стороны шарнирно при помощи двух тяг связана с кожухом заднего моста, который с другой стороны шарнирно связан с грузовой платформой, механизм наклона которой представляет собой электролебедку, связанную с грузовой платформой, концы троса которой закреплены в левой и правой частях кожуха заднего моста. Повышается устойчивость трицикла против поперечного опрокидывания. 7 з.п. ф-лы, 3 ил.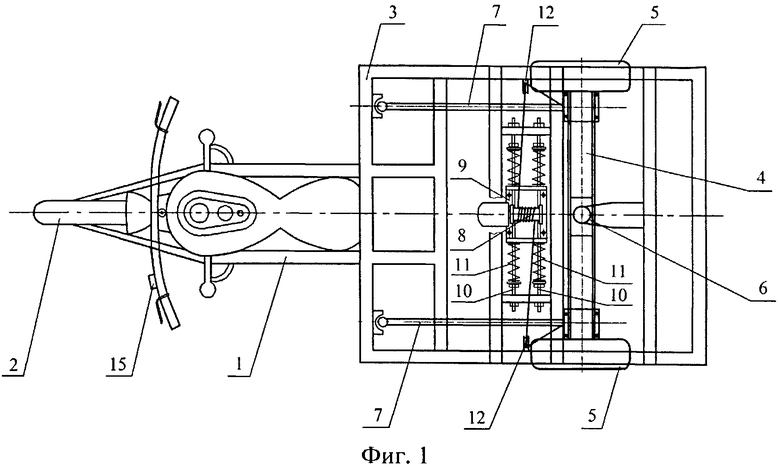
1. Трицикл с симметричным расположением задних ведущих колес и передним управляемым колесом, в котором кузов в виде грузовой платформы и рама вместе с управляемым колесом, как одно целое, может наклоняться относительно заднего моста в поперечном направлении, содержащий механизм наклона, отличающийся тем, что рама с одной стороны шарнирно при помощи двух тяг связана с кожухом заднего моста, который с другой стороны шарнирно связан с грузовой платформой, механизм наклона которой представляет собой электролебедку, связанную с грузовой платформой, концы троса которой закреплены в левой и правой частях кожуха заднего моста.
2. Трицикл по п.1, отличающийся тем, что барабан механизма наклона грузовой платформы закреплен на платформе, на ней же закреплены блоки, огибаемые левым и правым тросами лебедки, концы троса закреплены в левой и правой частях кожуха заднего моста.
3. Трицикл по п.п.1 и 2, отличающийся тем, что управление электролебедкой осуществляется автоматически в зависимости от угла косогора.
4. Трицикл по пп.1 и 2, отличающийся тем, что управление электролебедкой осуществляться при помощи пульта управления, установленного у левой рукоятки руля, и представляет собой тумблер с тремя положениями - поворот влево, вправо, нейтраль.
5. Трицикл по пп.1 и 2, отличающийся тем, что левый и правый концы троса закреплены в крайне левом и крайне правом частях кожуха заднего моста, левый и правый блоки расположены над местами крепления концов троса к кожуху заднего моста.
6. Трицикл по пп.1 и 2, отличающийся тем, что концы троса лебедки прикреплены к кожуху заднего моста при помощи скоб или серег.
7. Трицикл по пп.1 и 2, отличающийся тем, что грузовая платформа может фиксироваться в вертикальном положении замком, связанным с системой управления, а также в разных положениях механическим устройством.
8. Трицикл по п.1, отличающийся тем, что между его основными геометрическими параметрами соблюдается условие
B≥2hL/a=(2h)2/a,
где: B, L - колея и база трицикла, L=2h; a - расстояние центра масс от оси переднего колеса; h - высота центра масс.
| RU 2010112747 A, 10.10.2011 | |||
| CN 202208344 U, 02.05.2012 | |||
| CN 102320341 A, 18.01.2012 | |||
| CN 202029957 U, 09.11.2011 | |||
| US 20070193803 A1, 23.08.2007 | |||
| US 20070176384 A1, 02.08.2007 |

