Предлагаемый адаптивный радиолокатор относится к технике ближней радиолокации и предназначен, главным образом, для решения проблемы, связанной с необходимостью селекции объектов (целей), движущихся на фоне поверхности, создающей помеховые сигналы.
Требование селекции объектов возникает во многих практических случаях.
Так, например, селекция цели на фоне посторонних распределенных предметов необходима на заключительных стадиях управления движением кратковременно взаимодействующих объектов при встрече авиационно-космических объектов с целью стыковки, аварийной помощи, управления механизмом самого объекта для достижения конечной цели - приведения в рабочее состояние стыковочных устройств и т.п. (См. Коган И.М. Ближняя радиолокация (теоретические основы). М., Сов. радио, 1973. 272 с.).
Селекция приближающейся цели в непосредственной близости от наблюдателя широко используется, например, в системах радиолокационной охраны и защиты объектов, сооружений от несанкционированных к ним приближений.
Проблема однозначной селекции цели возникает также при защите морских плавательных средств (кораблей) на стадиях обнаружения встречно движущейся противокорабельной ракеты (ПКР) радиотехническим средством, например радиовзрывателем (являющимся устройством ближней радиолокации) боеприпаса, предназначенным для поражения данной ракеты (см. Б.И.Родионов, Н.Н.Новичков. Крылатые ракеты в морском бою. М., В. изд. 1987. 215 с.).
Известны и другие радиолокаторы для взаимодействия с целью в условиях влияния различных помех, образованных посторонними отражениями, в частности протяженной морской и земной поверхностями (см. Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. Том 1. Основы радиолокации. М., Сов. радио, 1976. 456 с.).
Однако решение поставленной задачи селекции низколетящей цели, перемещающейся над протяженной земной или морской поверхностью, ни одним из существующих современных радиолокаторов не может быть выполнено однозначно, так как при обнаружении низколетящей цели постоянно влияют сигналы помех, образованные отражением от посторонних объектов, в частности - от подстилающей поверхности.
Важным требованием к подобным радиолокаторам является их помехоустойчивость ко всем активным и пассивным (преднамеренным или случайным) помехам, часто возникающих в результате работы других как радиотехнических, так и электротехнических устройств, находящихся непосредственно на взаимодействующем объекте.
Таким образом, возникает главная проблема создания радиолокатора для однозначной селекции низколетящей цели в условиях действия различных помех.
К радиолокаторам, которые обладают однозначной селекцией цели и которые имеют относительно высокую помехоустойчивость к различным внешним помехам, относится радиолокатор с непрерывным сложным зондирующим сигналом [см.: 1) Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григоряна-Рябова, М., Сов. радио, 1970. 680 с. 2) Варакин Л.Е. Теория сложных сигналов. Сов. радио, 1970].
Известны радиолокаторы, в которых селекция цели обеспечивается обработкой сигнала корреляционным способом, а расстояние до центра измеряемой дальности задается задержкой сигнала в гетеродинном тракте корреляционного приемника [см.:1). Коган И.М. Ближняя радиолокация. Изд. Сов. радио, М., 1973, С.29-35. 2) Патент США №3614782, МКИ GOIS 42C 13/04; НКИ 343-7РГ, 102-70.2г за 1971 г.].
Из известных наиболее близким по технической сущности является радиолокатор, описанный в патенте США №3419861, Кл. 343-7, заявл. 26.06.56, опублик. 31.12.68.
Это радиоустройство содержит приемопередающую антенну, приемопередатчик (в который входят: циркулятор, смеситель, линия задержки), усилитель доплеровских частот (фильтр низких частот), исполнительную схему.
При встрече радиолокатора с целью эхо-сигнал с доплеровским сдвигом частоты поступает на вход смесителя вместе с ослабленным по мощности задержанным в линии задержки сигналом. Низкочастотный фильтр на выходе смесителя пропускает сигналы в диапазоне доплеровских частот. Выходной сигнал фильтра после достижения определенного уровня вызывает срабатывание исполнительной схемы.
Главным недостатком всех подобных структурных схем радиолокаторов является низкая траекторная эффективность обнаружения (вероятность правильного обнаружения) низколетящей над протяженной поверхностью цели, какой может быть, например, противокорабельная ракета в условиях действия помех радиолокатору, образованных радиосигналами, отраженными от разных точек дальностей, находящихся на этой поверхности.
Техническим результатом реализации предлагаемого адаптивного радиолокатора является повышение траекторной надежности правильного обнаружения встречно низколетящей цели в условиях действия помех радиолокатору, образованных радиосигналами, отраженными от этой поверхности.
Технический результат достигается тем, что для повышения траекторной надежности обнаружения радиолокатором низколетящей противокорабельной ракеты путем снижения влияния помеховых радиосигналов, образованных отражениями радиосигнала от морской поверхности, в радиолокатор, содержащий приемопередающую антенну, приемопередатчик, усилитель доплеровской частоты, исполнительный каскад, при этом отраженный от распределенной поверхности сигнал через приемопередающую антенну, преобразуясь в сигнал доплеровской частоты в приемопередатчике, поступает на вход усилителя доплеровской частоты, введены первый ключ, второй ключ, третий ключ, перестроечный блок, предназначенный для управления нижней граничной частотой усилителя доплеровской частоты, со сдвигом ее в сторону более высоких частот, детектор, пороговое устройство, мультивибратор, накопитель, при этом выход усилителя доплеровской частоты соединен с первыми входами первого и второго ключей, выход первого ключа соединен с последовательно соединенными входом детектора, входом порогового устройства, выход которого соединен со вторым входом второго ключа, с первым входом третьего ключа и входом мультивибратора, выход которого соединен с последовательно соединенными накопителем и перестроечным блоком, выход которого соединен со вторым входом усилителя доплеровской частоты, выход накопителя соединен со вторым входом третьего ключа, выход которого соединен со вторым входом первого ключа, а выход второго ключа соединен с исполнительным каскадом.
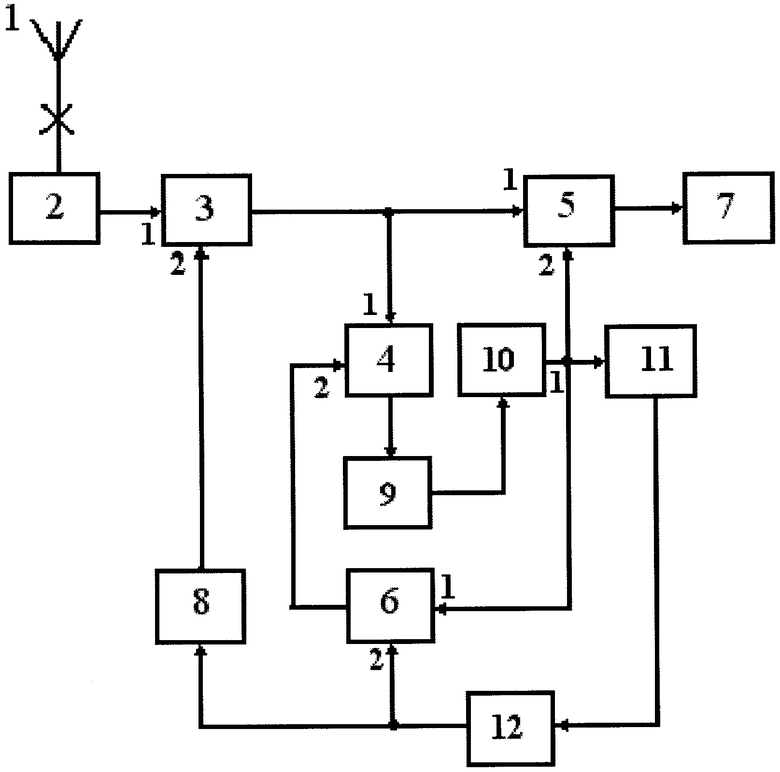
На фиг.2 представлена структурная схема предлагаемого адаптивного радиолокатора, на которой обозначено:
приемопередающая антенна 1,
приемопередатчик 2,
усилитель доплеровской частоты 3,
первый ключ 4,
второй ключ 5,
третий ключ 6,
исполнительный каскад 7,
перестроечный блок 8,
детектор 9,
пороговое устройство 10,
мультивибратор 11,
накопитель 12.
Адаптивный радиолокатор содержит приемопередающую антенну 1, приемопередатчик 2, усилитель доплеровской частоты 3, первый ключ 4, второй ключ 5, третий ключ 6, исполнительный каскад 7, перестроечный блок 8, детектор 9, пороговое устройство 10, мультивибратор 11, накопитель 12, при этом выход усилителя доплеровской частоты 3 соединен с первыми входами первого 4 и второго 5 ключей, выход первого ключа 4 соединен с последовательно соединенными входом детектора 9, входом порогового устройства 10, выход которого соединен со вторым входом второго ключа 5, с первым входом третьего ключа 6 и входом мультивибратора 11, выход которого соединен с последовательно соединенными накопителем 12 и перестроечным блоком 8, выход которого соединен со вторым входом усилителя доплеровской частоты 3, выход накопителя соединен со вторым входом третьего ключа 6, выход которого соединен со вторым входом первого ключа 4, а выход второго ключа 5 соединен с исполнительным каскадом 7.
Предлагаемый адаптивный радиолокатор (АРЛ) работает следующим образом.
В исходном положении первый 4, второй 5 и третий 6 ключи замкнуты (входы соединены с выходами). При движении АРЛ над распределенной поверхностью отраженный от нее сигнал через приемопередающую антенну 4, преобразуясь в доплеровскую частоту в приемопередатчике 5, поступает на вход УДЧ 3. На выходе УДЧ 3 появляется доплеровский сигнал, обусловленный перемещением АРВ относительно распределенной поверхности, который через первый вход замкнутого ключа 5 поступает на вход исполнительного каскада 7, а через первый вход замкнутого первого ключа 4 поступает на вход детектор 9, с которого сигнал поступает на вход порогового устройства 10, у которого постоянная времени устанавливается значением, меньшим постоянной времени исполнительного каскада 7.
Появление сигнала на входе порогового устройства 10 вызывает появление сигнала на его выходе, откуда он поступает на второй вход второго ключа 5 и на первый вход третьего ключа 6, размыкая ключи 5 и 6 и одновременно запуская мультивибратор 11, с которого импульсы поступают на накопитель 12, на выходе которого напряжение растет пропорционально времени работы мультивибратора 11 и подается как на второй вход третьего ключа 6, на первый вход которого подается выходной сигнал порогового устройства 10, так и на вход перестроечного блока 13, который управляет нижней граничной частотой УДЧ 3, сдвигая ее в сторону более высоких частот.
Генерирующие импульсы мультивибратора 11 имеют период следования, пропорциональный минимально необходимому числу импульсов для перестройки частотной характеристики усилителя доплеровской частоты 3 за время от начала появления на выходе УДЧ 3 рабочего сигнала, вызванного действием отражений от морской поверхности и вызывающего срабатывание порогового устройства 10, до момента снижения этого сигнала до уровня ниже чувствительности порогового устройства 10, после чего сигнал на выходе УДЧ 3 будет только в том случае, когда на его входе будет сигнал более высокой доплеровской частоты, например, отраженный от встречно летящей противокорабельной ракеты.
Перестроечным блоком 8 производится изменение полосы прозрачности УДЧ 3, ограничивая возможности усиления в УДЧ 3 сигналов тех низких частот, которые обусловлены радиосигналами, отраженными от протяженной морской поверхности. После перестройки УДЧ 3 пропускает доплеровские сигналы более высоких частот, образуемых отраженным от движущегося с большей относительной скоростью сближения объекта, каким может быть, например, встречно движущаяся противокорабельная ракета.
При достижении порогового уровня сигнала на выходе накопителя 12, при котором обеспечивается необходимая перестройка частотной характеристики УДЧ 3, сигнал подается не только на вход перестроечного блока 13, но и на второй вход третьего ключа 6, который, срабатывая, подает выходной сигнал на второй вход второго ключа 4, который при этом выключается и блокируется его участие в дальнейшей работе, тем самым прекращается возможность повторной перестройки частотной характеристики УДЧ 3.
После этого процесс перестройки УДЧ 3 прекращается.
После перестройки УДЧ 3 вновь появляющийся на его выходе сигнал, например, от встречно низколетящего объекта наблюдения через замкнутый второй ключ 5 поступает только на исполнительный каскад 7, вызывая его срабатывание.
Применительно к средствам борьбы с ПКР использование предлагаемого адаптивного радиолокатора позволяет существенно повысить траекторную эффективность обнаружения встречно низколетящей над морской поверхностью противокорабельной ракеты в условиях действия помех, образованных радиосигналами, отраженными от этой поверхности.
Практическая реализация предлагаемого адаптивного радиолокатора не представляет затруднений и может быть осуществлена применением широко известных аналоговых элементов и интегральных микросхем (см. Интегральные микросхемы. Справочник. Под общей ред. Б.В.Тарабрина. М., Изд. Сов. радио, 1984).
Изготовленный и испытанный как в лабораторных, так и в натурных условиях макет предлагаемого адаптивного радиолокатора показал его полную работоспособность в рассмотренных выше мешающих условиях помех.
Введением предлагаемых новых элементов и связей между ними принципиально по-новому решается проблема создания адаптивных радиолокаторов ближнего действия для селекции низколетящих целей над земной и морской поверхностью в условиях действия помех, создаваемых посторонними отражениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХВОЛНОВЫЙ АДАПТИВНЫЙ РАДИОЛОКАТОР | 2009 |
|
RU2422847C1 |
| ДВУХВОЛНОВЫЙ АДАПТИВНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2599054C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2503972C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2230338C2 |
| РАДИОВЗРЫВАТЕЛЬ ЗАЛПОВОГО ПОДРЫВА БОЕПРИПАСОВ ЗАМЕДЛЕННОГО ДЕЙСТВИЯ С ОПТИКО-ЭЛЕКТРОННЫМ УСТРОЙСТВОМ ПОДТВЕРЖДЕНИЯ НАЛИЧИЯ ЦЕЛИ "АККОРД-2К" | 2001 |
|
RU2216709C2 |
| Адаптивная двухчастотная разностно-фазовая система селекции движущихся целей | 1982 |
|
SU1841283A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| АВТОНОМНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2013 |
|
RU2533659C1 |
| СПОСОБ САМОНАВЕДЕНИЯ МАЛОРАЗМЕРНЫХ РАКЕТ НА ЦЕЛЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539823C1 |
Предлагаемый адаптивный радиолокатор относится к технике ближней радиолокации и предназначен, главным образом, для решения проблемы, связанной с необходимостью селекции объектов (целей), движущихся на фоне поверхности, создающей помеховые сигналы. Достигаемым техническим результатом изобретения является повышение траекторной надежности правильного обнаружения встречно низколетящей цели в условиях действия помех радиолокатору, образованных радиосигналами, отраженными от этой поверхности. Технический результат достигается тем, адаптивный радиолокатор содержит приемопередающую антенну, приемопередатчик, усилитель доплеровской частоты, исполнительный каскад, первый, второй и третий ключи, детектор, пороговое устройство, мультивибратор, накопитель и перестроечный блок, соединенные определенным образом между собой, при этом перестроечный блок предназначен для управления нижней граничной частотой усилителя доплеровской частоты со сдвигом ее в сторону более высоких частот. 1 ил.
Адаптивный радиолокатор, содержащий приемопередающую антенну, приемопередатчик, усилитель доплеровской частоты, исполнительный каскад, при этом отраженный от распределенной поверхности сигнал через приемопередающую антенну, преобразуясь в сигнал доплеровской частоты в приемопередатчике, поступает на вход усилителя доплеровской частоты, отличающийся тем, что в него введены первый ключ, второй ключ, третий ключ, перестроечный блок, предназначенный для управления нижней граничной частотой усилителя доплеровской частоты, со сдвигом ее в сторону более высоких частот, детектор, пороговое устройство, мультивибратор, накопитель, при этом выход усилителя доплеровской частоты соединен с первыми входами первого и второго ключей, выход первого ключа соединен с последовательно соединенными входом детектора, входом порогового устройства, выход которого соединен со вторым входом второго ключа, с первым входом третьего ключа и входом мультивибратора, выход которого соединен с последовательно соединенными накопителем и перестроечным блоком, выход которого соединен со вторым входом усилителя доплеровской частоты, выход накопителя соединен со вторым входом третьего ключа, выход которого соединен со вторым входом первого ключа, а выход второго ключа соединен с исполнительным каскадом.
| US 3419861 А, 31.12.1968 | |||
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ЭХОСИГНАЛОВ, ПРИНИМАЕМЫХ ПО БОКОВЫМ ЛЕПЕСТКАМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2005 |
|
RU2291460C2 |
| ЦИФРОВОЙ КОМПЕНСАТОР ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2087000C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В РЛС С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 1991 |
|
RU2230337C2 |
| WO 03023438 A2, 20.03.2003 | |||
| US 5892477 A, 06.04.1999 | |||
| JP 6127567 A, 05.12.1986 | |||
| US 5355329 A, 25.10.1994. | |||

