Область техники, к которой относится изобретение
Изобретение относится к строительной машине, содержащей опорное основание, мачту, установленную на опорном основании, и тросовую лебедку с барабаном для наматывания троса, установленным с возможностью вращения, в соответствии с ограничительной частью пункта 1 формулы изобретения.
Указанная строительная машина может представлять собой, в частности, бурильную установку для получения скважин в грунте. Такие скважины требуются, например, для устройства колодцев, в целях улучшения грунта для фундамента или для установки буровых свай и водонепроницаемых стенок. На мачте может быть установлена тележка, на которой размещается привод буровой установки, обеспечивающий вращение буровой штанги.
Трос такой строительной машины может выполнять различные функции. Так, например, он может представлять собой опорный трос, который проходит над вершиной мачты и поддерживает буровую штангу или буровой инструмент. Трос может быть также предусмотрен для подвески на него вспомогательных устройств, в частности разрывного устройства для высвобождения элементов буровой штанги.
Уровень техники
Тросовую лебедку с барабаном для намотки троса предпочтительно устанавливают на опорном основании или на платформе строительной машины. Путем вращения барабана трос можно наматывать на барабан или сматывать с барабана.
Строительная машина с тросовой лебедкой описана, например, в ЕР 1862636 А1 или DE 10343079 В3.
Раскрытие изобретения
Задачей изобретения является обеспечение строительной машины с тросовой лебедкой, которая позволяет получать высокое качество намотки и минимальный износ троса даже в случае приложения к тросу низкой нагрузки.
Эта задача решена согласно изобретению при помощи строительной машины с характеристиками, указанными в п.1 формулы изобретения. Предпочтительные варианты осуществления представлены в зависимых пунктах формулы изобретения, а также в описании изобретения и на чертежах.
Строительная машина согласно изобретению отличается тем, что тросовая лебедка содержит намоточное устройство, которое включает входной шкив для направления троса, направляющую каретку, которая установлена с возможностью перемещения вдоль оси вращения барабана для намотки троса и на которую опирается входной шкив, и тормоз троса для натяжения троса в зоне подхода к барабану для намотки троса.
В случае строительной машины указанного типа часть троса, смотанная с тросовой лебедки, обычно не висит свободно, но проходит через направляющую троса, прикрепленную, например, к вершине мачты строительной машины.
Первая основная идея изобретения связана с тем фактом, что кроме существующей закрепленной направляющей троса в соответствующих случаях обеспечивается намоточное устройство для троса, при помощи которого можно регулировать угол подхода троса к барабану для намотки троса. Для того чтобы установить предварительно заданный угол подхода, предусмотрен шкив, установленный с возможностью перемещения вдоль продольной оси барабана для намотки троса, который направляет трос во время наматывания и/или разматывания в продольном направлении барабана, обеспечивая, таким образом, по существу радиальный подход троса к барабану независимо от позиции троса относительно оси барабана.
Согласно изобретению входной шкив установлен на направляющей каретке, которая может перемещаться в продольном направлении барабана для намотки троса. При этом угол подхода троса можно установить или настроить путем настройки или перемещения направляющей каретки. Входной шкив, при помощи которого обеспечивается направление движения троса и который можно также назвать направляющим шкивом, может опираться на направляющую каретку с возможностью вращения.
Вторая основная идея изобретения связана с тем фактом, что качество намотки особенно улучшается в том случае, если во время наматывания осуществляется торможение троса перед подходом к барабану, таким образом, трос натягивается в зоне подхода к барабану для намотки троса. Предусмотренный тормоз троса обеспечивает достаточное натяжение троса во время наматывания даже при отсутствии нагрузки на трос. Такое натяжение троса обеспечивает аккуратное, равномерное наматывание троса на барабан. В результате обеспечивается высокое качество намотки и, следовательно, низкий износ троса.
Особенно хорошее качество намотки обеспечивается благодаря тому, что тормоз троса прикреплен к направляющей каретке, позицию которой можно регулировать, также с возможностью перемещения в продольном направлении барабана.
В предпочтительном варианте осуществления изобретения тормоз троса содержит тормозное устройство для торможения желобчатого шкива, который направляет движение троса. Тормоз троса может содержать, например, прижимной шкив, который действует на трос и/или тормозные колодки, которые действуют на желобчатый шкив. Желобчатый шкив может представлять собой, в частности, входной шкив намоточного устройства. Альтернативно этому кроме входного шкива можно предусмотреть желобчатый шкив с активным торможением. Тормоз троса предпочтительно содержит, по меньшей мере, два желобчатых шкива, которые направляют трос.
В другом предпочтительном варианте осуществления изобретения предусмотрен тормоз троса, содержащий гидравлический позиционирующий цилиндр, который приводит в действие тормозное устройство, более конкретно - прижимной шкив. Гидравлический позиционирующий цилиндр может представлять собой, в частности, цилиндр одностороннего действия.
Кроме того, согласно изобретению предпочтительно предусмотрено средство автоматического управления тормозом троса, которое можно также назвать блоком управления тормозом троса. Блок управления предпочтительно предназначен для того, чтобы изменять эффект торможения, в частности тормозное усилие, тормоза троса. Увеличение или уменьшение эффекта торможения предпочтительно осуществляется в зависимости от режима работы, в частности от натяжения троса. При помощи измерительного устройства можно определить величину текущей нагрузки на трос, при этом, если величина нагрузки меньше (опускается ниже) минимально допустимого предела, активируется тормоз троса.
Блок управления предпочтительно содержит средство счета или счетчик для определения числа оборотов барабана для намотки троса. Блок управления может быть предназначен для того, чтобы устанавливать эффект торможения тормоза троса в зависимости от результата определения числа оборотов барабана для намотки троса. Так, например, если известна длина троса, результат определения числа оборотов можно использовать для определения длины свободного, т.е. не намотанного, троса. Если эта длина меньше предварительно установленного значения, может быть активирован тормоз троса или увеличен эффект торможения тормоза троса для того, чтобы поддерживать достаточное натяжение троса. Поэтому блок управления предпочтительно обеспечивает управление тормозом троса в зависимости от результата определения числа оборотов барабана для намотки троса.
В другом предпочтительном варианте осуществления изобретения намоточное устройство содержит позиционирующий цилиндр для перемещения направляющей каретки. Позиционирующий цилиндр предпочтительно представляет собой цилиндр двустороннего действия и еще более предпочтительно - гидравлический цилиндр. Позиционирующий цилиндр может содержать корпус цилиндра, который служит в качестве направляющей для каретки.
Для автоматического наматывания с высоким качеством намотки предпочтительно предусмотрено сенсорное устройство, выполненное с возможностью определения позиции троса в продольном направлении барабана для намотки троса, а также средство управления для управления перемещением направляющей каретки в зависимости от сигнала сенсорного устройства. Указанное средство управления можно также назвать блоком управления направляющей кареткой, и в соответствующих случаях оно может быть выполнено в виде единого блока с блоком управления тормозом троса.
Когда трос наматывается на барабан, он направляется предшествующим слоем намотки или рифлением, выполненным при необходимости на барабане для намотки троса. Это приводит к осевому перемещению троса, которое определяется сенсорным устройством. В соответствии с этим определенным осевым перемещением троса блок управления обеспечивает управление осевым перемещением направляющей каретки таким образом, чтобы направляющая каретка автоматически следовала за осевым перемещением троса. При этом направление перемещения и скорость направляющей каретки определяются осевым перемещением троса. Благодаря этому можно обеспечить автоматическое управление перемещением троса независимо от диаметра троса и скорости вращения барабана для намотки троса.
В предпочтительном варианте осуществления сенсорное устройство выполнено в виде контактного устройства. Особенно предпочтительно, чтобы контактное устройство имело, по меньшей мере, одну контактную площадку, которая может контактировать с тросом, а также предпочтительно предусмотреть блок управления для управления перемещением направляющей каретки в зависимости от контактирования указанной, по меньшей мере, одной контактной площадки с тросом. При этом управление направляющей кареткой может осуществляться путем контактирования с указанной контактной площадкой. Направляющая каретка или направляющий шкив установлены таким образом, чтобы при контакте троса с контактной площадкой вследствие его осевого перемещения, т.е. при изменении угла подхода троса, они следовали за тросом в соответствии с его осевым перемещением. В результате этого активирование наматывания происходит посредством установленного контакта.
В принципе, перемещение направляющей каретки может происходить скачкообразно. Однако для того, чтобы обеспечить равномерное перемещение направляющей каретки, несмотря на кратковременное контактирование с контактной площадкой, которое имеет место в определенных случаях, предпочтительно предусмотреть блок управления, который генерирует выходной сигнал для постоянного или длительного перемещения направляющей каретки. При этом входной сигнал средства управления может представлять собой прерывистый или кратковременный сигнал контактного устройства. Для повышения стабильности управления перемещением троса этот сигнал преобразуется в непрерывный сигнал перемещения, поступающий в виде выходного сигнала.
Указанная, по меньшей мере, одна контактная площадка предпочтительно расположена в зоне подхода троса к барабану для намотки троса, в частности между входным шкивом и барабаном для намотки троса. При этом во время наматывания трос вначале проходит через входной шкив и, в соответствующих случаях, через желобчатый шкив с возможностью активного торможения, а затем - через контактную площадку к барабану для намотки троса.
Кроме того, предпочтительно, чтобы указанная, по меньшей мере, одна контактная площадка была установлена с возможностью перемещения в продольном направлении барабана для намотки троса. Для этой цели контактная площадка предпочтительно неподвижно прикрепляется к направляющей каретке таким образом, чтобы она могла перемещаться совместно с направляющей кареткой. В частности, контактная площадка может быть установлена на направляющей каретке неподвижно относительно входного шкива таким образом, чтобы между входным шкивом и контактной площадкой было определенное расстояние.
Для адаптации к тросам различного диаметра и/или для настройки чувствительности автоматического слежения за входным желобчатым шкивом особенно предпочтительно, чтобы позицию указанной, по меньшей мере, одной контактной площадки на направляющей каретке можно было регулировать или настраивать. Это следует понимать, в частности, как возможность изменения расстояния между контактной площадкой и входным шкивом в продольном направлении барабана для намотки троса. После выполнения настройки контактная площадка может быть неподвижно закреплена в выбранной позиции таким образом, чтобы во время работы машины она не перемещалась относительно входного шкива. В особенности предпочтительно, чтобы для настройки контактную площадку можно было вручную перемещать относительно направляющего шкива.
Для того чтобы отслеживать перемещение направляющей каретки в двух направлениях, предпочтительно предусмотреть две контактные площадки, тогда при помощи первой контактной площадки можно управлять перемещением направляющей каретки в первом направлении, а при помощи второй контактной площадки - перемещением направляющей каретки во втором направлении. Трос предпочтительно проходит через отверстие между двумя контактными площадками. При этом первая контактная площадка предпочтительно расположена в продольном направлении барабана для намотки троса с первой стороны, и вторая контактная площадка - со второй стороны троса. И при этом обе контактные площадки должны быть установлены с возможностью контактирования с тросом.
Кроме того, может быть предусмотрено переключающее устройство для переключения направления перемещения направляющей каретки, когда трос достигает позиции конечного слоя на барабане для намотки троса.
При этом предпочтительно предусмотреть стопор для направляющей каретки, который установлен таким образом, чтобы трос достигал осевой границы барабана для намотки троса, в частности прокладочного диска, когда направляющая каретка контактирует со стопором, и при последующем наматывании контактировал со второй контактной площадкой для изменения направления перемещения направляющей каретки на обратное. При этом для перемещения вперед направляющей каретки трос контактирует с первой контактной площадкой, а для перемещения назад - со второй контактной площадкой. Вследствие изменения контактирования с первой контактной площадкой на контактирование со второй контактной площадкой происходит изменение направления перемещения направляющей каретки. Таким образом, направляющая каретка всегда следует в направлении контакта. Для адаптации к геометрическим размерам тросовой лебедки контактные площадки предпочтительно установлены с возможностью регулирования их позиции.
Краткое описание чертежей
Ниже приведено описание изобретения со ссылками на прилагаемые схематические чертежи, на которых представлены:
фиг.1 - вид спереди в частичном разрезе тросовой лебедки для строительной машины;
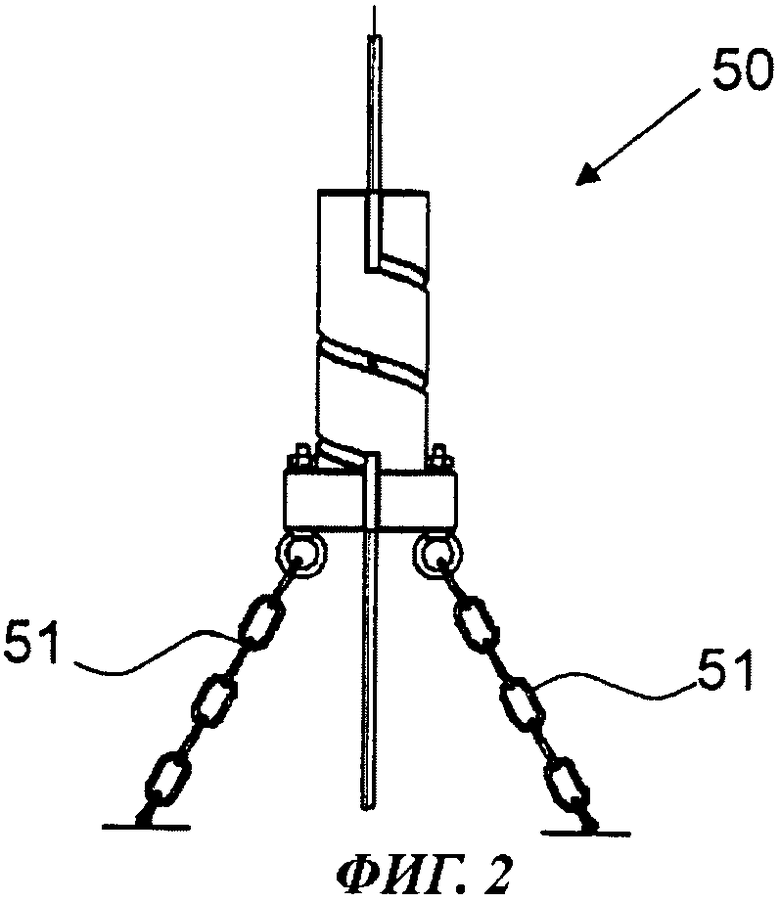
фиг.2 - сердечник троса;
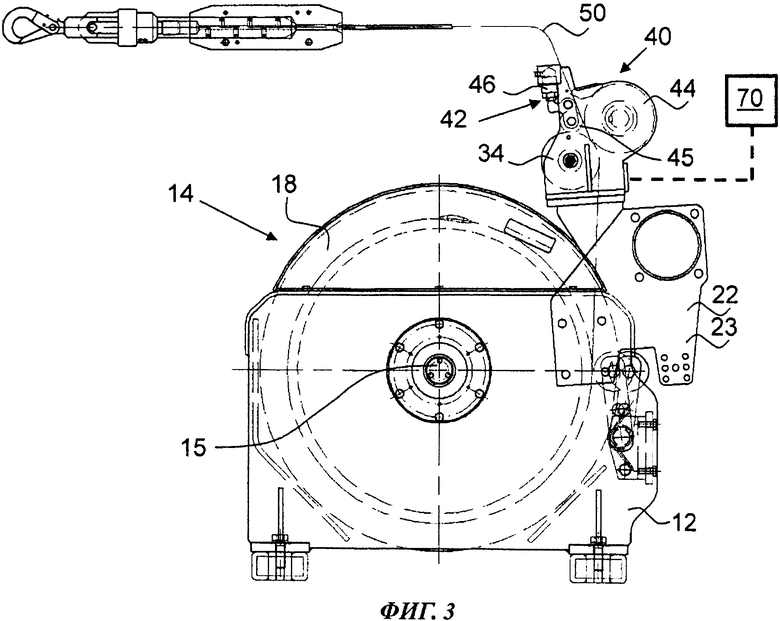
фиг.3 - вид справа тросовой лебедки с фиг.1;
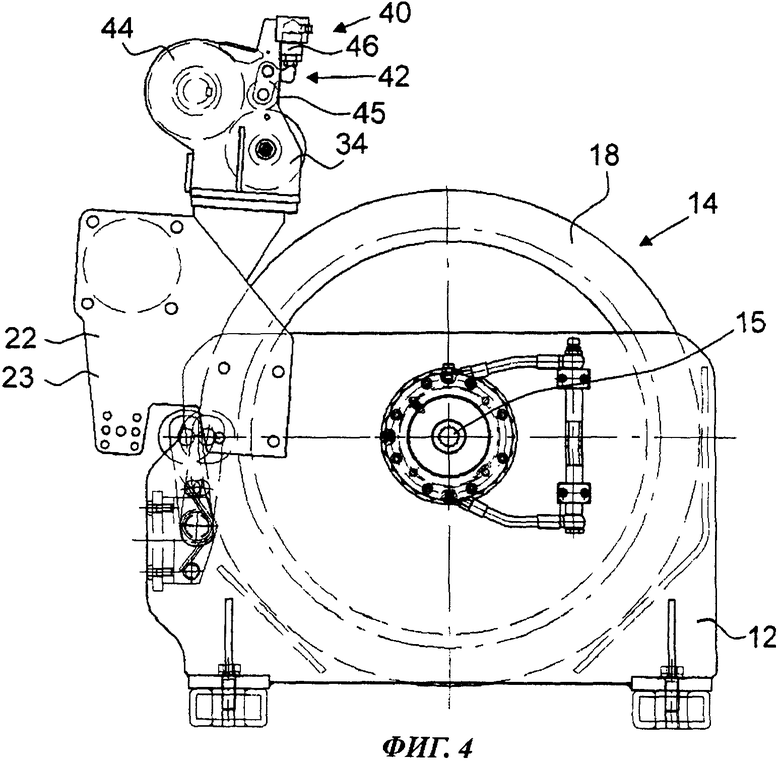
фиг.4 - вид слева тросовой лебедки с фиг.1;
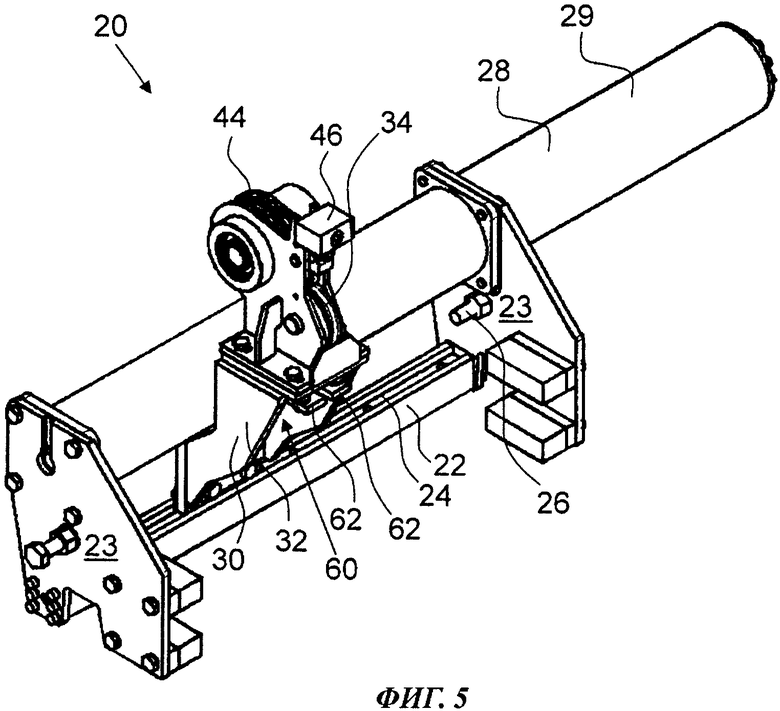
фиг.5 - вид в перспективе намоточного устройства;
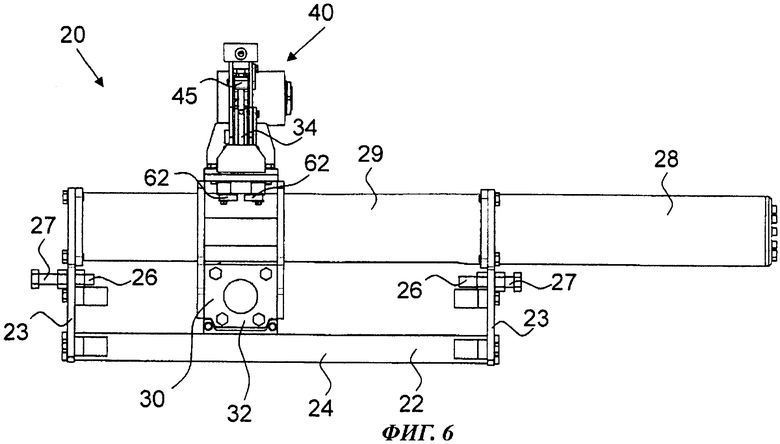
фиг.6 - вид сзади намоточного устройства с фиг.5;
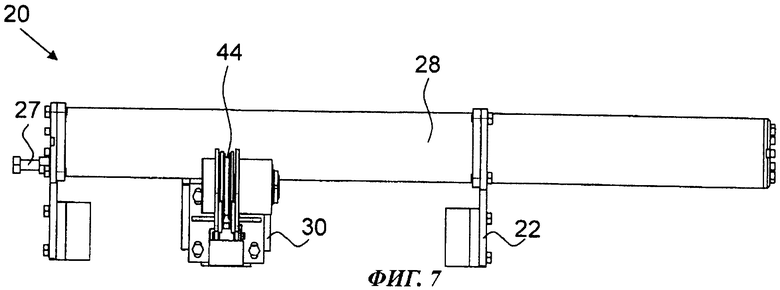
фиг.7 - вид сверху намоточного устройства с фиг.5;
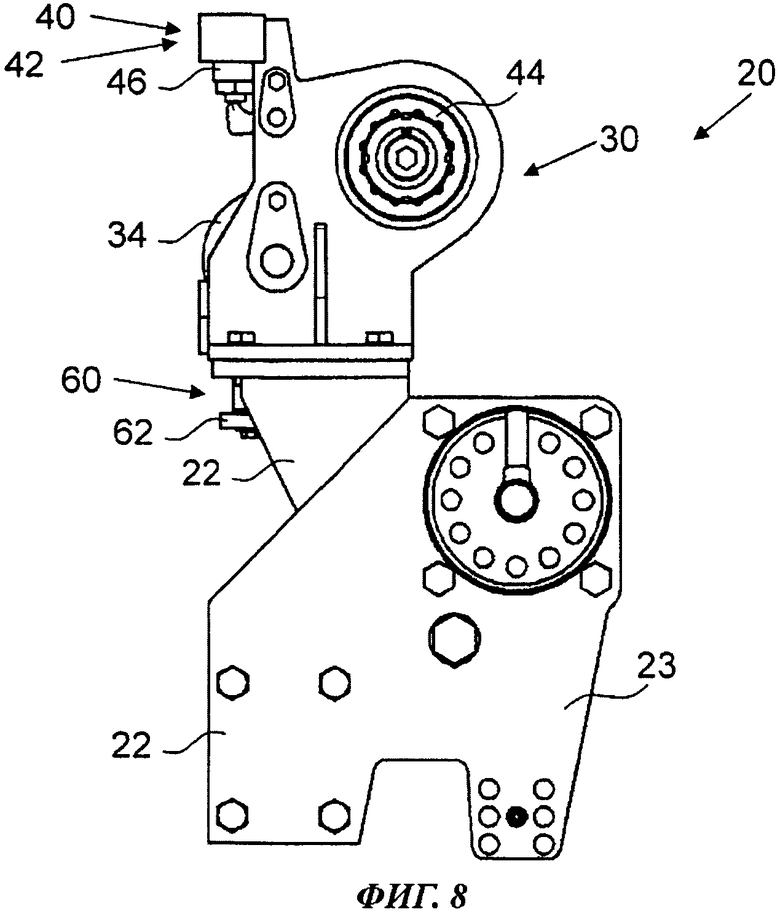
фиг.8 - вид справа намоточного устройства с фиг.5 и
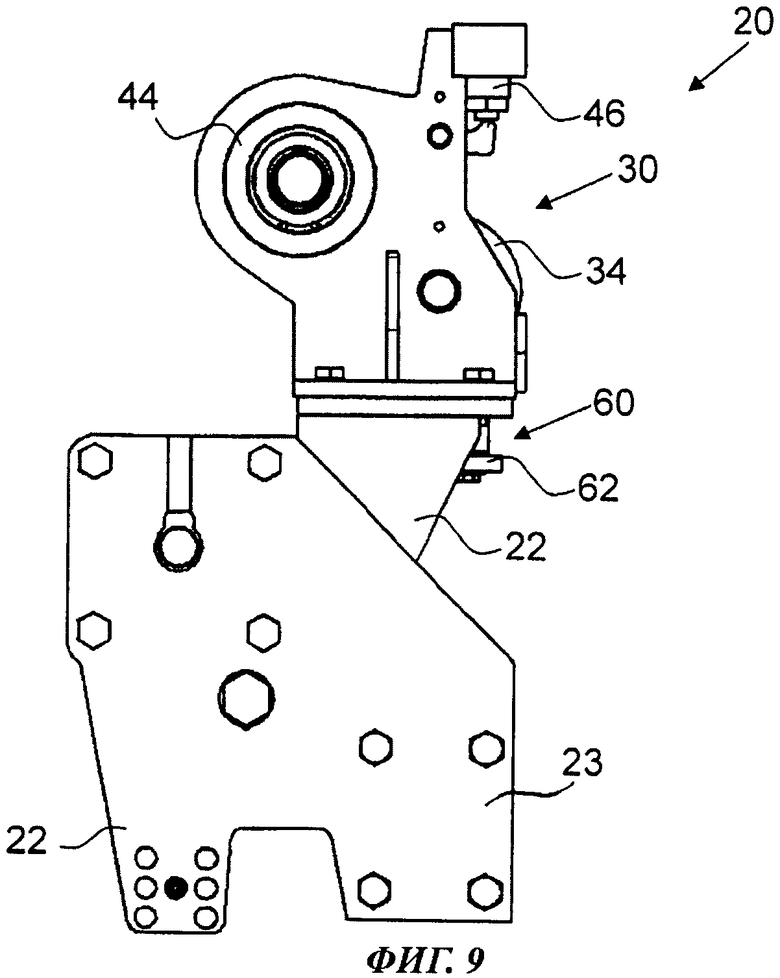
фиг.9 - вид слева намоточного устройства с фиг.5.
Эквивалентные компоненты на всех чертежах обозначены одинаковыми ссылочными номерами.
Осуществление изобретения
На фигурах 1, 3 и 4 показан вариант осуществления тросовой лебедки 10, более конкретно - лебедки, в которой используется трос с сердечником, согласно изобретению. Тросовая лебедка 10 содержит раму 12 лебедки, на которой с возможностью вращения вокруг оси 15 установлен барабан 14 для намотки троса. Барабан 14 содержит барабанный вал 16 и два прокладочных диска 18, которые расположены на противоположных концах оси барабанного вала 16 и служат в качестве осевых ограничителей троса 50 на барабане 14.
Трос 50 предпочтительно выполнен в виде троса с сердечником, как показано на фиг.2. Сердечник троса содержит крепежное средство 51, более конкретно - крепежную цепь, для прикрепления троса к опорному устройству.
Тросовая лебедка 10 содержит намоточное устройство 20, которое более подробно показано на фигурах 5-9. Намоточное устройство 20 прикреплено к раме 12 лебедки и содержит раму 22, на которой установлена направляющая каретка 30 с возможностью перемещения в продольном направлении. Направляющая каретка 30 содержит опору 32, на которую с возможностью вращения опирается входной шкив 34, направляющий трос 50.
Для направления движения направляющей каретки 30 рама 22 содержит рельсовую направляющую 24. Для перемещения направляющей каретки 30 предусмотрен позиционирующий цилиндр 28, который расположен внутри корпуса 29 цилиндра в продольном направлении барабана 14. Позиционирующий цилиндр 28 установлен на тросовой лебедке 10 со стороны подхода троса и поддерживает направляющую каретку 30. Последняя прямолинейно опирается и установлена таким образом, чтобы подход троса к барабану 14 в радиальном направлении обеспечивался также для различных слоев троса. Корпус 29 позиционирующего цилиндра 28 служит в качестве дополнительной направляющей для направляющей каретки 30.
На раме 22, в частности на боковых панелях 23 рамы слева и справа, предусмотрены боковые стопоры 26 для направляющей каретки 30. Стопоры 26 ограничивают перемещение направляющей каретки 30 и установлены таким образом, чтобы трос 50 доходил до прокладочного диска 18 барабана 14, когда направляющая каретка 30 контактирует с одним из стопоров 26. Для настройки позиции стопоров 26 предусмотрены регулировочные устройства 27.
Тросовая лебедка 10 или альтернативно этому намоточное устройство 20 содержит также тормоз 40 троса и контактное устройство 60, которые установлены на направляющей каретке 30.
Тормоз 40 троса содержит один или несколько желобчатых шкивов 44, при этом тормозное устройство 42 обеспечивает активное торможение, по меньшей мере, одного из указанных шкивов. В показанном варианте осуществления эффект торможения создает регулируемый прижимной шкив 45, который может прижиматься к тросу 50 с переменным давлением. Кроме того, тормоз 40 троса содержит гидравлический цилиндр 46, который может представлять собой, в частности, цилиндр одностороннего действия, для управления тормозным устройством 42 или альтернативно этому - прижимным шкивом 45. Тормозное устройство 42 тормоза троса 40 может быть встроено в желобчатый шкив 44.
Контактное устройство 60 содержит два параллельных регулируемых контакта или контактные площадки 62, между которыми направляется трос 50. Контакты или контактные площадки 62 расположены вдоль троса 50 между входным шкивом 34 или желобчатым шкивом 44 и барабаном 14.
Входной шкив 34 и желобчатый шкив 44, выполненный с возможностью торможения, расположены с двух противоположных сторон троса 50. Наматываемый трос 50 проходит через желобчатый шкив 44, который выполнен с возможностью торможения и который можно также назвать тормозным шкивом троса, через входной шкив 34 и через предпочтительно прямоугольное отверстие, расположенное между контактными площадками 62, к барабану 14.
Тросовая лебедка 10 содержит гидравлическую систему или гидроустановку для приведения в действие барабана 14, направляющей каретки 30 и/или тормоза 40 троса. Гидравлическая система выполнена с возможностью обеспечения равномерной подачи направляющей каретки 30 в обоих рабочих направлениях. Благодаря контактному устройству 60, перемещение направляющей каретки 30 может быть автоматически адаптировано к различным скоростям троса. Эти перемещения не зависят от направления вращения барабана 14. Отдельный поток масла предпочтительно предусмотрен для привода барабана 14 и для привода намоточного устройства 20 и направляющей каретки 30, соответственно.
Для управления направляющей кареткой 30 и/или тормозом 40 троса предусмотрен блок 70 управления.
Направляющий клапан управления позиционирующим цилиндром 28 установлен непосредственно на раме 12 лебедки в соответствующей позиции вблизи позиционирующего цилиндра 28 и согласно гидравлической схеме соединяется с гидроустановкой строительной машины и позиционирующим цилиндром 28. Со стороны нагнетания гидравлического привода лебедки установлен нажимной переключатель.
Согласно гидравлической схеме направляющий клапан блока 70 управления соединяется с гидроустановкой строительной машины и гидравлическим цилиндром 46 тормоза троса 40.
Блок 70 управления и клапаны, предусмотренные в соответствующих местах, соединяются с электрической установкой строительной машины. Блок 70 управления имеет электрические соединения с контактным устройством 60, тросом 50, рабочими элементами, а также с нажимным переключателем и клапанами в соответствии с принципиальной электрической схемой. Указанные рабочие элементы включают, например, переключатель включения/выключения тормоза, кнопочный переключатель автоматического или ручного управления и переключатель перемещения позиционирующего цилиндра 28 влево/вправо.
Ниже приведено описание наматывания троса 50 на барабан 14 в автоматическом режиме.
Приведение в действие рабочего элемента традиционной лебедки, например гидравлического преобразователя управления регуляторами, приводит к созданию давления в гидравлическом контуре тросовой лебедки 10. Сигнал от нажимного переключателя принимается блоком 70 управления, при этом активируется автоматический режим.
Направляющая каретка 30 неподвижна, трос 50 не контактирует ни с одной из двух контактных площадок 62. Барабан 14 начинает вращаться и, как описано выше, трос 50 проходит через намоточное устройство 20 и наматывается на барабан 14 в соответствии с рифлениями барабана или, в случае гладких барабанов, в соответствии с возможной позицией следующего витка. Это приводит к осевому перемещению троса 50, таким образом, после определенного периода наматывания он вступает в контакт с одной из контактных площадок 62. В результате устанавливается электрический контакт с левой или правой стороны, и соответствующий сигнал поступает на блок 70 управления. В ответ на это блок 70 управления активирует направляющий клапан позиционирующего цилиндра 28 таким образом, чтобы направляющая каретка 30 следовала в направлении контакта. При этом благодаря системной взаимосвязи управляемая по времени активация клапана обязательно соответствует скорости вращения барабана 14.
Направляющая каретка 30 перемещается в позицию последнего витка. Это означает, что она упирается в один из механических стопоров 26. Последний установлен таким образом, чтобы трос 50 достигал прокладочного диска 18 барабана 14 и после наматывания первого витка нового слоя контактировал с противоположной контактной площадкой 62. Получение соответствующего сигнала блоком 70 управления приводит к изменению направления перемещения позиционирующего цилиндра. Направляющая каретка 30 снова следует в направлении контакта.
Ниже приведено альтернативное этому возможное управление в ручном режиме.
В определенных режимах работы или рабочих состояниях могут возникнуть нежелательные реакции системы. Примеры этого включают начальную операцию, повторный запуск системы в позиции "изменение слоя троса", абсолютно неправильное расположение направляющей каретки 30, недостаточно ровное наматывание и/или необходимое техническое обслуживание.
В случае этих или других режимов работы или рабочих состояний может случиться так, что трос 50 не сможет контактировать с какой-либо контактной площадкой 62 или случайно создаст контакт в неправильном направлении. Тогда позицию каретки можно откорректировать вручную или специально установить направляющую каретку 30 в неправильную позицию. Для этой цели при помощи нажимного переключателя на ограниченный период времени можно активировать, так называемый, режим ручного управления. Эта функция позволяет откорректировать позицию направляющей каретки 30. Такую коррекцию можно также произвести, когда барабан 14 является неподвижным.
Ниже приведено описание функционирования тормоза троса 40.
Качество намотки или, скорее, правильность наматывания лебедкой зависит, в частности, от угла подхода троса и нагрузки, приложенной к тросу, а в конечном счете - от натяжения троса. Перемещаемый входной шкив 34 или желобчатый шкив 44 обеспечивает определенный угол подхода троса. Для того чтобы получить адекватное качество намотки или предотвратить перепутывание слоев в случае многослойного наматывания необходимо создавать достаточное натяжение троса. Обычно это обеспечивается нагрузкой, приложенной к лебедочному тросу 50. При этом тормоз 40 троса оказывает поддерживающий эффект или позволяет производить наматывание троса 50 без нагрузки.
Для этой цели при помощи выключателя активируется направляющий клапан, который включает гидравлический цилиндр 46 одностороннего действия. Последний обеспечивает надлежащее наматывание или надлежащий прижим троса 50 к желобчатому шкиву 44 тормоза 40 троса. Таким образом, во время наматывания встроенное тормозное устройство 42 может поддерживать натяжение троса 50 самостоятельно или в качестве вспомогательного средства.
Ниже приведено описание разматывания в автоматическом режиме.
Разматывание происходит так же, как наматывание, т.е. направляющая каретка 30 следует за позицией троса в соответствии со стороной контакта. При помощи нажимного переключателя система освобождается только при движении лебедки.
В целом, намоточное устройство 20 с направляющей кареткой 30, входным шкивом 34 и тормозом 40 троса обеспечивает возможность свободной адаптации к традиционным тросовым лебедкам. Поэтому традиционную тросовую лебедку можно простым образом модернизировать в тросовую лебедку 10 согласно изобретению с намоточным устройством 20. При этом ход или длину позиционирующего цилиндра 28 можно адаптировать к размерам существующей тросовой лебедки, в частности ее барабана для намотки троса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВОЕ ОБОРУДОВАНИЕ БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ЛЕБЕДКИ ТЯГОВОГО ОБОРУДОВАНИЯ | 2009 |
|
RU2408525C1 |
| СНЕГОУБОРОЧНАЯ МАШИНА, СОДЕРЖАЩАЯ УЗЕЛ ЛЕБЕДКИ ДЛЯ ОБЛЕГЧЕНИЯ УПРАВЛЕНИЯ СНЕГОУБОРОЧНОЙ МАШИНОЙ НА КРУТЫХ СКЛОНАХ, И СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ УЗЛА ЛЕБЕДКИ | 2010 |
|
RU2525259C2 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| ПОДЪЕМНЫЙ КРАН И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2017 |
|
RU2743304C2 |
| ЛЕБЕДКА ПРЯМОГО ПРИВОДА С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2553793C2 |
| Устройство для замены гибкого тягового органа подъемно-транспортной машины | 1989 |
|
SU1696380A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| КРУПНОТОННАЖНЫЙ ПОГРУЗЧИК ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИ СТРОИТЕЛЬСТВЕ БОЛЬШОГО КОРАБЛЯ ИЛИ МОРСКОЙ УСТАНОВКИ | 2015 |
|
RU2622435C1 |
| Устройство для намотки на катушки нитеобразных материалов | 1975 |
|
SU640779A1 |
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
Изобретение относится к строительной машине, такой как строительная машина для получения скважин в грунте. Строительная машина содержит опорное основание, мачту и тросовую лебедку с барабаном для намотки троса. Тросовая лебедка содержит намоточное устройство, которое включает входной шкив для направления троса, направляющую каретку, которая установлена с возможностью перемещения вдоль оси вращения барабана и на которую опирается входной шкив, тормоз троса для натяжения троса в зоне подхода к барабану. Тормоз троса установлен на направляющей каретке и содержит тормозное устройство и желобчатый шкив, выполненный с возможностью его торможения тормозным устройством. Входной шкив и желобчатый шкив расположены с двух противоположных сторон троса. Тормозное устройство выполнено в виде регулируемого прижимного шкива, выполненного с возможностью его прижимания к тросу с переменным давлением. Предусмотрено измерительное устройство, выполненное с возможностью определения величины текущей нагрузки на трос. Предусмотрен блок управления для автоматического управления тормозом троса. Причем тормоз троса активируется, если измеренная величина текущей нагрузки на трос меньше минимального допустимого предела. Изобретение обеспечивает повышение износостойкости троса и повышение качества работ. 13 з.п. ф-лы, 9 ил.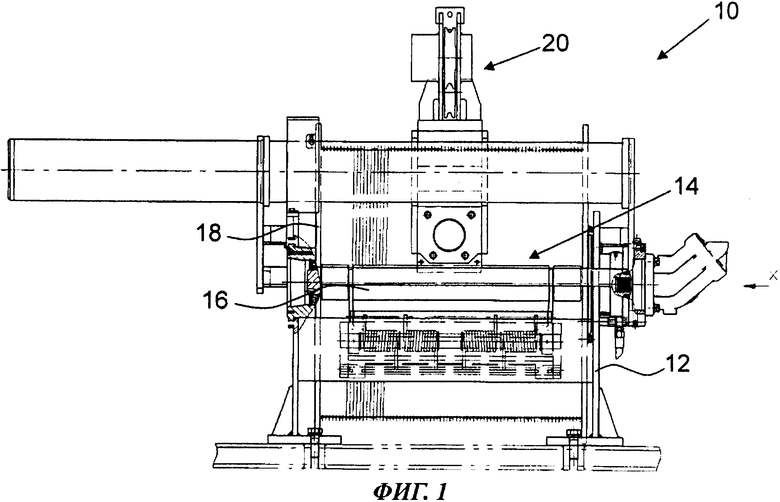
1. Строительная машина, такая как строительная машина для получения скважин в грунте, содержащая
- опорное основание,
- мачту, установленную на опорном основании, и
- тросовую лебедку (10) с установленным с возможностью вращения барабаном (14) для намотки троса (50), проходящего через вершину мачты,
причем указанная тросовая лебедка (10) содержит намоточное устройство (20), которое включает
- входной шкив (34) для направления троса (50),
- направляющую каретку (30), которая установлена с возможностью перемещения вдоль оси вращения барабана (14) для намотки троса и на которую опирается входной шкив (34), и
- тормоз (40) троса для натяжения троса (50) в зоне подхода к барабану (14),
отличающаяся тем, что
- тормоз (40) троса установлен на направляющей каретке (30) и содержит тормозное устройство (42) и, по меньшей мере, один желобчатый шкив (44), выполненный с возможностью его торможения тормозным устройством (42), причем
- входной шкив (34) и выполненный с возможностью торможения желобчатый шкив (44) расположены с двух противоположных сторон троса (50), а тормозное устройство (42) выполнено в виде регулируемого прижимного шкива (45), выполненного с возможностью его прижимания к тросу 50 с переменным давлением, причем
- предусмотрено измерительное устройство, выполненное с возможностью определения величины текущей нагрузки на трос (50), и
- предусмотрен блок (70) управления для автоматического управления тормозом (40) троса, причем тормоз (40) троса активируется, если измеренная величина текущей нагрузки на трос (50) меньше минимально допустимого предела.
2. Строительная машина по п.1, отличающаяся тем, что тормоз (40) троса содержит гидравлический позиционирующий цилиндр (46) для приведения в действие тормозного устройства (42).
3. Строительная машина по п.1, отличающаяся тем, что блок управления (70) выполнен с возможностью изменения тормозного усилия тормоза (40) троса.
4. Строительная машина по п.3, отличающаяся тем, что блок (70) управления содержит средство счета числа оборотов барабана (14).
5. Строительная машина по п.4, отличающаяся тем, что блок (70) управления обеспечивает управление тормозом (40) троса в зависимости от результата определения числа оборотов барабана (14) для намотки троса.
6. Строительная машина по п.1, отличающаяся тем, что намоточное устройство (20) содержит позиционирующий цилиндр (28) для перемещения направляющей каретки (30).
7. Строительная машина по п.1, отличающаяся тем, что
- предусмотрено сенсорное устройство (60), содержащее, по меньшей мере, одну сенсорную зону (62) и выполненное с возможностью определения позиции троса (50) в продольном направлении барабана (14), при этом
- предусмотрен блок (70) управления для управления перемещением направляющей каретки (30) в зависимости от сигнала сенсорного устройства (60).
8. Строительная машина по п.1, отличающаяся тем, что
- предусмотрено контактное устройство (60), содержащее, по меньшей мере, одну контактную площадку (62), которая может контактировать с тросом (50), при этом
- предусмотрен блок (70) управления для управления перемещением направляющей каретки (30) в зависимости от контактирования указанной, по меньшей мере, одной контактной площадки (62) с тросом (50).
9. Строительная машина по п.7, отличающаяся тем, что блок (70) управления обеспечивает подачу выходного сигнала для постоянного перемещения направляющей каретки (30).
10. Строительная машина по п.8, отличающаяся тем, что указанная, по меньшей мере, одна контактная площадка (62) расположена в зоне подхода троса (50) к барабану (14).
11. Строительная машина по п.8, отличающаяся тем, что указанная, по меньшей мере, одна контактная площадка (62) расположена на направляющей каретке (30) с возможностью перемещения вместе с направляющей кареткой (30).
12. Строительная машина по п.11, отличающаяся тем, что позицию указанной, по меньшей мере, одной контактной площадки (62) на направляющей каретке (30) можно регулировать.
13. Строительная машина по п.8, отличающаяся тем, что предусмотрены две контактные площадки (62), при этом при помощи первой контактной площадки (62) можно управлять перемещением направляющей каретки (30) в первом направлении, а при помощи второй контактной площадки (62) - перемещением направляющей каретки (30) во втором направлении.
14. Строительная машина по п.13, отличающаяся тем, что предусмотрен стопор (26) для направляющей каретки (30), который установлен таким образом, чтобы трос (50) доходил до осевой границы барабана (14), когда направляющая каретка (30) контактирует со стопором (26), и при последующем наматывании контактировал со второй контактной площадкой (62) для изменения направления перемещения направляющей каретки (30).
| СТРОИТЕЛЬНАЯ, В ОСОБЕННОСТИ БУРОВАЯ, МАШИНА | 2007 |
|
RU2353746C2 |
| Кабельный кран | 1981 |
|
SU1020364A1 |
| Устройство для возбуждения сейсмических волн | 1975 |
|
SU556395A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГЕОФИЗИЧЕСКИХ ПРИБОРОВ В ВОССТАЮЩИХ СКВАЖИНАХ | 1996 |
|
RU2124110C1 |
| Каротажный подъемник | 1989 |
|
SU1668650A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ (ВАРИАНТЫ) | 2009 |
|
RU2399576C1 |
| ТРЕЛЕВОЧНОЕ ОБОРУДОВАНИЕ | 0 |
|
SU174886A1 |
| DE 10343079 B3, 19.05.2005 | |||

