Изобретение относится к области судовождения - автоматическому управлению движением судна, в частности к идентификации математической модели движения судна.
Известны системы идентификации параметров математической модели движения судна, которые основаны на использования заданной структуры математической модели движения судна:
 ,
,
где Vx, Vyz, ω, φ - линейные скорости судна продольная и поперечная, угловая скорость, угол курса,
δ - угол перекладки руля,
a iij - неизвестные параметры математической модели движения судна (подлежащие уточнению гидродинамические коэффициенты a11, a12, a13, a21, a22, a23),
ζ1, ζ2, ζ3 - случайные входные помехи с нулевыми средними и известными ковариационными матрицами M[i(t)]=0 и 
[П.В. Попов. Идентификация уравнений динамики подвижного аппарата по натурным данным ходовых испытаний ОАО «Концерн НПО «Аврора» С.Петербург // Сборник трудов ХХХVIII Всероссийской конференции, издательство ИПУ РАН, 2012 г., Москва.]
Известна система экспериментального определения влияния вариации коэффициента математической модели объекта на его динамику (SU 205913 A1, 01.01.1967). Выходной сигнал с исследуемого объекта запоминают (задерживают), формируют невязку, а затем пропускают через электронную модель исследуемого объекта, в котором варьируют величину коэффициента (постоянной времени) модели, недостатком которой является идентификация только одного параметра идентифицируемой системы.
Известна система экспериментального определения параметров математической модели движения судна (RU 2151713 C1, 27.06.2000, принятая в качестве прототипа), которая использует только часть измеряемых фазовых координат состояния судна. Используя измеренные параметры и сформированные электронной моделью движения судна, получают невязки, которые минимизируют путем вариации искомых величин гидродинамических коэффициентов.
Недостатки:
1. использование только части измеряемых фазовых координат состояния судна;
2. низкая точность уточнения параметров гидродинамических коэффициентов мат. модели;
3. высокие требования к виду задаваемых специальных режимов плавания для идентификации параметров гидродинамических коэффициентов мат. модели.
Техническим результатом предлагаемой системы идентификации гидродинамических коэффициентов математической модели движения судна является:
- создания высокоточной математической модели движения судна, параметры которой уточняются в процессе рейса;
- повышения качества автоматического управления движением;
- повышение безопасности проводки судна в узкостях.
Технический результат достигается тем, что система идентификации гидродинамических коэффициентов математической модели движения судна содержит рулевой привод, датчики:
- угловой скорости ω, курса судна ϕ, угла перекладки руля δ, первый сумматор и блок задания маневра идентификации - ϕзд, вход которого подключен к первому входу рулевого привода, ко второму входу которого подключен выход первого сумматора, к трем входам первого сумматора подключены выходы трех датчиков: угловой скорости ω, курса судна ϕ, угла перекладки руля δ, в рулевом приводе формируется закон управления рулем:
dδзд./dt=Кϕ(ϕ-ϕзд)+Kωω-Kδδ,
где ϕ - текущий курс судна, от датчика курса судна ϕ,
ϕзд. - заданный курс, из блока задания маневра идентификации ϕзд,
ω - угловая скорость судна, от датчика угловой скорости ω,
δ - угол перекладки руля, от датчика угла перекладки руля δ,
dδзд./dt - заданная скорость перекладки руля.
Система дополнительно содержит блок памяти, девять сумматоров, два блока суммирования, десять множителей, блок сравнения, датчики: боковой скорости Vy, скорости хода судна Vx, углового ускорения dω/dt и бокового ускорения dVy/d, выход последнего подключен к первому входу первого блока суммирования, датчик боковой скорости Vy через первый множитель подключен к входу второго множителя, ко второму входу которого подключен гидродинамический коэффициент a11 из блока памяти, выход второго множителя подключен к первому входу второго сумматора, ко второму входу первого множителя подключен датчик скорости хода Vx, датчик угловой скорости ω через третий множитель подключен к входу четвертого множителя, выход четвертого множителя подключен к второму входу второго сумматора, ко второму входу третьего множителя подключен датчик скорости хода Vx, ко второму входу четвертого множителя подключен гидродинамический коэффициент a12 с блока памяти, датчик угла перекладки руля δ через пятый множитель подключен к входу шестого множителя, выход шестого множителя подключен к третьему входу второго сумматора, ко второму входу пятого множителя подключен выход седьмого множителя, к обоим входам которого подключен датчик скорости хода Vx, ко второму входу шестого множителя подключен гидродинамический коэффициент a13 с выхода блока памяти, во втором сумматоре формируется правая часть первого уравнения математической модели движения судна:

где VxVy - продольная и поперечная скорость движения судна, поступают от датчиков Vx и Vy;
ω - угловая скорость, поступает от датчика ω;
δ - угол перекладки руля, поступает от датчика δ,
выход второго сумматора подключен ко второму входу первого блока суммирования, на выходе которого формируется невязка:

которая через блок коэффициента усиления идентификатора Ka11 подключается к первому входу третьего сумматора, ко второму входу которого подключен гидродинамический коэффициент a11 с выхода блока памяти, в третьем сумматоре формируется оценка корректированного гидродинамического коэффициента 

выход третьего сумматора подключен к первому входу блока сравнения, первый вход четвертого сумматора через блок коэффициента усиления идентификатора Ka12. подключается к выходу первого блока суммирования, ко второму входу четвертого сумматора подключен гидродинамический коэффициент a12 с блока памяти, в четвертом сумматоре формируется оценка корректированного гидродинамического коэффициента 

выход четвертого сумматора подключен к второму входу блока сравнения, первый вход пятого сумматора через блок коэффициента усиления идентификатора Ka13. подключен к выходу первого блока суммирования, к второму входу пятого сумматора подключен гидродинамический коэффициент a13 с выхода блока памяти, в пятом сумматоре формируется оценка корректированного гидродинамического коэффициента 

выход пятого сумматора подключается к третьему входу блока сравнения, в блоке сравнения формируют модули разности корректированных оценок гидродинамических коэффициентов 
где a11 0, a12 0, a13 0 - гидродинамические коэффициенты предыдущего цикла вычислений, вводятся в блок сравнения из блока памяти, используя модули разностей в блоке сравнения формируют три неравенства:
выход датчика углового ускорения dω/dt подключен к первому входу второго блока суммирования, ко второму входу которого через шестой сумматор и множители подключены:
- датчик боковой скорости Vy через первый множитель и восьмой множитель (ко второму входу которого подключен гидродинамический коэффициент: 
- датчик угловой скорости ω через третий множитель и девятый множитель (ко второму входу которого подключен гидродинамический коэффициент: 
- датчик скорости хода Vx через два входа седьмого множителя, пятый множитель, ко второму входу которого подключен датчик перекладки руля δ, и десятый множитель, ко второму входу которого подключен гидродинамический коэффициент: 

которая через блок коэффициента усиления идентификатора Ka21 подключается к входу седьмого сумматора, ко второму входу которого подключен гидродинамический коэффициент: 
в седьмом сумматоре формируется оценка корректированного гидродинамического коэффициента 

выход седьмого сумматора подключается к четвертому входу блока сравнения, выход второго блока суммирования через блок коэффициента усиления идентификатора Ka22 подключается к входу восьмого сумматора, ко второму входу которого подключен гидродинамический коэффициент: 


выход восьмого сумматора подключен к пятому входу блока сравнения, выход второго блока суммирования через блок коэффициента усиления идентификатора Ka23. подключен к входу девятого сумматора, ко второму входу которого подключен гидродинамический коэффициент 


выход девятого сумматора подключен к шестому входу блока сравнения, в блоке сравнения формируют модули разности корректированных гидродинамических коэффициентов 
при этом в блоке сравнения три модуля разности используют для формирования трех неравенств 
удовлетворяются, то процесс идентификации всех гидродинамических коэффициентов математической модели успешно закончен, если хотя бы одно из шести неравенств не удовлетворяет условию 
то оценки гидродинамических коэффициентов: 





Технический результат достигается благодаря:
- использованию полного набора измерителей фазового состояния судна,
(включая измерители линейных dVy/dt и угловых dω/dt ускорений),
- идентификации с упрощенным набором идентификационных режимов движения,
- определению значений гидродинамических коэффициентов путем решения двух независимых систем алгебраических уравнений (сил и моментов).
Предлагаемая система идентификации позволяет в процессе рейса судна (практически не нарушая установленный режим движения) уточнять гидродинамические коэффициенты математической модели движения судна Математическая модель принята вида:
 .
.
где Vx, Vy, ω - продольная, боковая (линейные) и угловая скорости движения судна,
dVy/dt - боковое (линейное) ускорение судна 
dω/dt - угловое ускорение судна 
δ - кормовой руль,
aij - неизвестные, подлежащие уточнению (шесть оценок гидродинамических коэффициентов: 





Система идентификации гидродинамических коэффициентов математической модели движения судна.
Система включает: рулевой привод, датчики угловой скорости ω, курса судна ϕ угла перекладки руля δ, первый сумматор и блок задания маневра идентификации - ϕзд, вход которого подключен к первому входу рулевого привода, к второму входу которого подключен выход первого сумматора, к трем входам первого сумматора подключены выходы трех датчиков: угловой скорости ω, курса судна ϕ, угла перекладки руля δ, в рулевом приводе формируется закон управления рулем:

где ϕ - текущий курс судна, от датчика курса судна ϕ,
ϕзд. - заданный курс, из блока задания маневра идентификации ϕзд.,
ω - угловая скорость судна, от датчика угловой скорости ω,
δ - угол перекладки руля, от датчика угла перекладки руля δ,
dδзд./dt - заданная скорость перекладки руля.
Для реализации предложенного технического решения в систему введены: блок памяти, шесть блоков коэффициентов усиления идентификатора, второй-девятый сумматоры, два блока суммирования, первый-десятый множители, блок сравнения, датчики: боковой скорости Vy, скорости хода Vx, углового ускорения dω/dt и бокового ускорения dVy/dt, выход последнего подключен к первому входу первого блока суммирования, датчик боковой скорости Vy через первый множитель подключен к входу второго множителя, ко второму входу которого подключен гидродинамический коэффициент a11 из блока памяти, выход второго множителя подключен к первому входу второго сумматора, к второму входу первого множителя подключен датчик скорости хода Vx. Датчик угловой скорости ω через третий множитель подключен к входу четвертого множителя, выход четвертого множителя подключен к второму входу второго сумматора, к второму входу третьего множителя подключен датчик скорости хода Vx, к второму входу четвертого множителя подключен гидродинамический коэффициент a12 с блока памяти. Датчик угла перекладки руля δ через пятый множитель подключен к входу шестого множителя, выход шестого множителя подключен к третьему входу второго сумматора, к второму входу пятого множителя подключен выход седьмого множителя, к обоим входам которого подключен датчик скорости хода Vx, к второму входу шестого множителя подключен гидродинамический коэффициент a13 с выхода блока памяти, во втором сумматоре формируется правая часть первого уравнения математической модели движения судна (1):

где VxVy - продольная и поперечная скорость движения судна, поступают от датчиков Vx и Vy;
ω - угловая скорость, поступает от датчика ω;
δ - угол перекладки руля, поступает от датчика δ,
выход второго сумматора подключен ко второму входу первого блока суммирования, на выходе которого формируется невязка:

которая через блок коэффициента усиления идентификатора Ka11 подключается к первому входу третьего сумматора, ко второму входу которого подключен гидродинамический коэффициент a11 с выхода блока памяти, в третьем сумматоре формируется оценка корректированного гидродинамического коэффициента

выход третьего сумматора подключен к первому входу блока сравнения.
Первый вход четвертого сумматора через блок коэффициента усиления идентификатора Ka12. подключается к выходу первого блока суммирования, к второму входу четвертого сумматора подключен гидродинамический коэффициент a12 с блока памяти, в четвертом сумматоре формируется оценка корректированного гидродинамического коэффициента

выход четвертого сумматора подключен к второму входу блока сравнения, первый вход пятого сумматора через блок коэффициента усиления идентификатора Ka13. подключен к выходу первого блока суммирования, к второму входу пятого сумматора подключен гидродинамический коэффициент a13 с выхода блока памяти, в пятом сумматоре формируется оценка корректированного гидродинамического коэффициента

выход пятого сумматора подключается к третьему входу блока сравнения, в блоке сравнения формируют модули разности корректированных оценок гидродинамических коэффициентов 

где a11 0, a12 0, a13 0 - гидродинамические коэффициенты предыдущего цикла вычислений вводятся в блок сравнения из блока памяти, используя модули разностей в блоке сравнения формируют три неравенства:

если все три неравенства (6) удовлетворяются, то процесс идентификации оценок гидродинамических коэффициентов 


Аналогичным образом определяются и коэффициенты 


Выход датчика углового ускорения dω/dt подключен к входу второго блока суммирования 5, к входам которого через шестой сумматор и множители также подключены:
- датчик боковой скорости Vy через первый множитель и восьмой множитель (к второму входу которого подключен гидродинамический коэффициент:
- датчик угловой скорости ω через третий множитель и девятый множитель (к второму входу которого подключен гидродинамический коэффициент: 
- датчик скорости хода Vx через седьмой множитель (к второму входу которого подключен этот же датчик скорости хода Vx), пятый множитель (к второму входу которого подключен датчик перекладки руля δ и десятый множитель (к второму входу которого подключен гидродинамический коэффициент: 
На выходе второго блока суммирования таким образом формируется невязка:

которая через блок коэффициента усиления идентификатора Ka21 подключается к входу седьмого сумматора, ко второму входу которого подключен гидродинамический коэффициент:
В седьмом сумматоре формируется оценка корректированного гидродинамического коэффициента 

выход седьмого сумматора подключается к четвертому входу блока сравнения.
Выход второго блока суммирования через блок коэффициента усиления идентификатора Ка22 подключается к входу восьмого сумматора, ко второму входу которого подключен гидродинамический коэффициент 


выход восьмого сумматора подключен к пятому входу блока сравнения.
Выход второго блока суммирования через блок коэффициента усиления идентификатора Ka23 подключен к входу девятого сумматора, ко второму входу которого подключен гидродинамический коэффициент 


выход девятого сумматора подключен к шестому входу блока сравнения.
В блоке сравнения формируют модули разности корректированных гидродинамических коэффициентов 


где a21.0, a22.0, a23.0 - гидродинамические коэффициенты предыдущего цикла вычислений вводятся в блок сравнения из блока памяти,
В блоке сравнения три модуля разности (5a) используют для формирования трех неравенств

если все три неравенства (6а) удовлетворяются, то процесс идентификации величин оценок гидродинамических коэффициентов 


Если все модули неравенств (три модуля (6) и три модуля(6а) удовлетворяются то процесс идентификации всех гидродинамических коэффициентов математической модели (1) успешно завершен. Если хотя бы один из шести модулей разности не удовлетворяет условию (6) или (6а), то значения оценок гидродинамических коэффициентов: 











Через интервал времени Δt начинается следующий цикл формирования оценок гидродинамических коэффициентов 





Через интервал времени m Δt, когда будут удовлетворяться оба условия (6) и (6а) одновременно, процесс идентификации гидродинамических коэффициентов математической модели движения судна успешно завершается.
Построение и работа системы идентификации гидродинамических коэффициентов математической модели движения судна.
На фиг. приведена блок-схема системы идентификации параметров математической модели движения судна которая включает: рулевой привод - 1, объект управления - судно - 2, блок задания маневра идентификации ϕзд - 3, датчики: бокового ускорения dVy/dt - 4, боковой скорости Vy - 5, скорости хода судна Vx - 6, угловой скорости ω - 7, угла перекладки руля δ - 8, углового ускорения dω/dt - 9, первый-десятый множители: 10, 33, 12, 32, 13, 31, 11, 34, 35, 36, первый-девятый сумматоры: 30, 14, 25, 24, 23, 15, 26, 27, 28, первый - 37 и второй - 38 блоки суммирования, первый-шестой блоки коэффициентов усиления идентификатора Ka11…Ka23 - 18, 17, 16, 19, 20, 21, блок памяти - 22, блок сравнения - 29, датчик угла курса ϕ - 31.
Реализовать рассматриваемую систему следует используя элементы цифровой техники и штатные судовые устройства (рулевой привод, датчики спутниковой навигационной системы…)
Процесс идентификации гидродинамических коэффициентов математической модели движения судна начинается в момент времени to заданием прямоугольных периодических импульсов, которые формируются в блоке задания маневра идентификации - 3 и заданием начальных значений оценок гидродинамических коэффициентов: 





Сигнал в виде прямоугольного импульса, амплитуда которого ϕзд. вводится на первый вход рулевого привода - 1, на второй вход которого вводятся сигналы с выхода первого сумматора 31. На вход первого сумматора - 30. подключены датчики: угла курса ϕ - 31, руля δ - 8 и угловой скорости ω - 7. В рулевом приводе - 1 формируется закон управления кормовым рулем:

Это приведет к отслеживанию судном угла курса ϕ=ϕзд, ϕзд, поступающего в рулевой привод - 1 с блока задания маневра идентификации ϕзд - 3.
В предложенной нами системе определяются оценки шести неизвестных гидродинамических коэффициентов математической модели движения судна 
Выход датчика (бокового) ускорения dVy/dt - 4 подключен к входу первого блока суммирования - 37, к входу которого также подключены:
- датчик боковой скорости Vy - 5, через первый множитель - 10 (ко второму входу которого подключен датчик скорости хода Vx - 6,) и второй множитель - 33 (к второму входу которого подключен гидродинамический коэффициент: 
- датчик угловой скорости ω - 7 через третий множитель - 12 (к второму входу которого подключен датчик скорости хода Vx - 6,) и четвертый множитель - 32 (к второму входу которого подключен гидродинамический коэффициент: 
- датчик Vx - 6 через седьмой множитель - 11 (ко второму входу которого подключен этот же датчик скорости хода Vx - 6), пятый множитель 13 (ко второму входу которого подключен датчик угла перекладки руля δ - 8 и шестой множитель - 31 (к второму входу которого подключен гидродинамический коэффициент: 

Невязка вида (3а) с выхода первого блока суммирования - 37 через блок коэффициента усиления идентификатора Ka11 - 18 подключается к входу третьего сумматора - 25, ко второму входу которого подключен гидродинамический коэффициент: 


которую вводят в блок сравнения 29.
Невязка вида (3а) с выхода первого блока суммирования - 37 через блок коэффициента усиления идентификатора 

На выходе четвертого сумматора - 24 формируется оценка корректированного гидродинамического коэффициента 

которая поступает в блок сравнения 29.
Невязка вида (3а) с выхода первого блока суммирования - 37 через блок коэффициента усиления идентификатора - 6 подключается к входу пятого сумматора - 23, ко второму входу которого подключен гидродинамический коэффициент: 
На выходе пятого сумматора - 23 формируется оценка корректированного гидродинамического коэффициента 

которая поступает в блок сравнения 29.
Аналогичным образом определяются и оценки коэффициентов 


- датчик боковой скорости Vy - 5 через первый множитель - 10 и восьмой множитель - 34 (к второму входу которого подключен гидродинамический коэффициент 
- датчик угловой скорости ω - 7 через третий множитель - 12 и девятый множитель -35 (к второму входу которого подключен гидродинамический коэффициент: 
- датчик угла перекладки руля δ - 8 через пятый множитель - 13 и десятый множитель - 36 (к второму входу которого подключен гидродинамический коэффициент: 

Выход второго блока суммирования 38 с невязкой вида (3б) через блок коэффициента усиления идентификатора Ka21 - 19 подключается к входу седьмого сумматора 26, ко второму входу которого подключен гидродинамический коэффициент: 


которая поступает в блок сравнения 29.
Выход второго блока суммирования - 38 с невязкой вида (3б) через блок коэффициента усиления идентификатора Ka22 - 20 подключается к входу восьмого сумматора - 27, ко второму входу которого подключен гидродинамический коэффициент: 


которая поступает в блок сравнения 29.
Выход второго блока суммирования - 31 с невязкой вида (2a) через блок коэффициента усиления идентификатора Ka23 - 21 подключается к входу девятого сумматора - 28, ко второму входу которого подключен гидродинамический коэффициент: 
На выходе девятого сумматора - 28 формируется оценка корректированного гидродинамического коэффициента 

которая поступает в блок сравнения 29.
В блоке сравнения - 29 оценки гидродинамических коэффициентов 


Если все шесть модулей разности (56)удовлетворяют неравенствам:

то процесс идентификации гидродинамических коэффициентов прекращается и полученные оценки гидродинамических коэффициентов соответствуют заданной точности.
Если хотя бы одна из шести невязок (5б) не удовлетворяет неравенству (6б), то полученные в блоках 23-28 новые значения оценок гидродинамических коэффициентов:








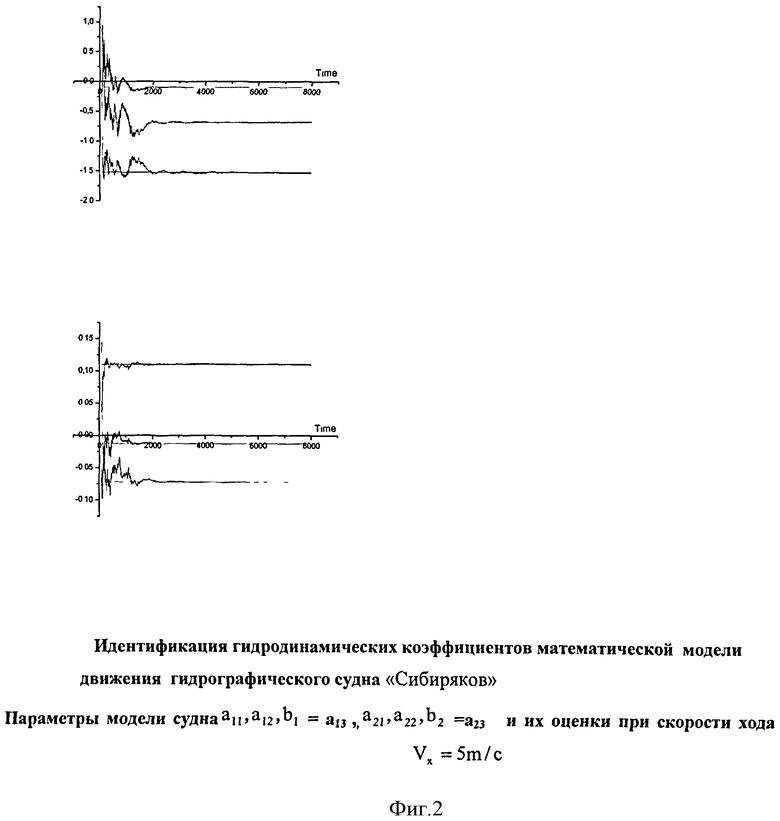
Результаты моделирования
На фиг. представлены оценки и истинные значения параметров модели судна a11, a12, b1=a13, a21, a22, b2=a23 при скорости судна Vx=5m/c с использованием идентификационного режима «зигзаг».
Из рисунков следует, что процесс корректировки оценок гидродинамических коэффициентов занимает около шести минут (расхождение восстановленных оценок гидродинамических коэффициентов от истинных значений не более 10%).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТКАЗОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2013 |
|
RU2532000C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| Система управления движением судна с дублированием каналов курса и резервным управлением по курсу | 2017 |
|
RU2660193C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С УЧЕТОМ ВОЛНЕНИЯ | 2011 |
|
RU2499727C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
Изобретение относится к области судостроения, а именно к области автоматического управления движением судов. Система идентификации гидродинамических коэффициентов математической модели движения судна содержит рулевой привод, датчики: угловой скорости, курса судна, угла перекладки руля, боковой скорости, скорости хода судна, углового ускорения и бокового ускорения, блок задания маневра идентификации, два блока суммирования, блок памяти, блок сравнения, десять сумматоров и десять множителей. Достигается высокая точность математической модели движения судна, высокое качество автоматического управления движением, повышенная безопасность проводки судна в узкостях. 2 ил.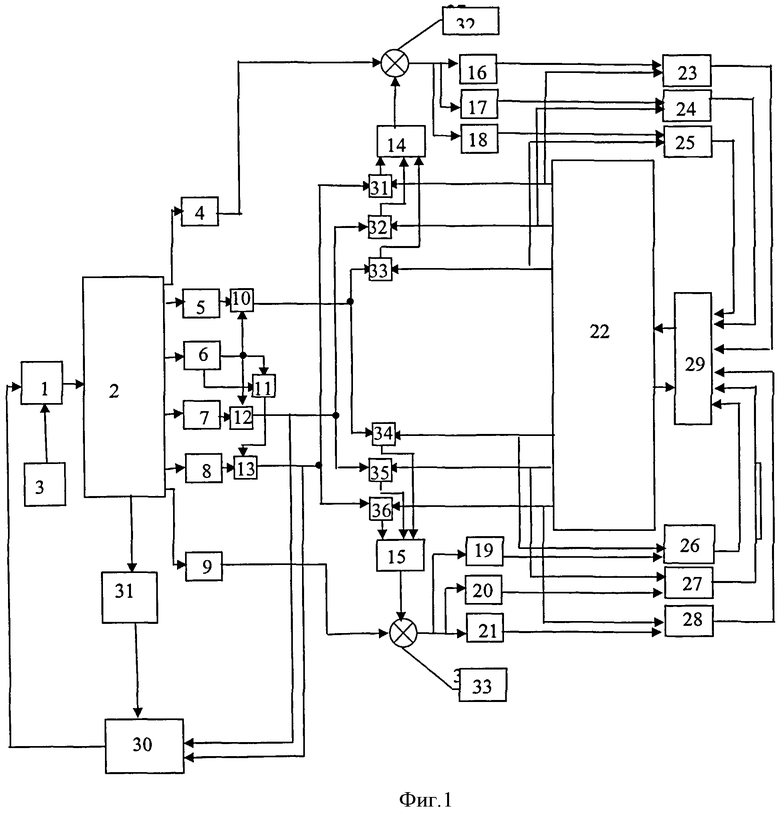
Система идентификации гидродинамических коэффициентов математической модели движения судна, содержащая рулевой привод, датчики: угловой скорости ω, курса судна ϕ, угла перекладки руля δ, первый сумматор и блок задания маневра идентификации ϕзд., вход которого подключен к первому входу рулевого привода, ко второму входу которого подключен выход первого сумматора, к трем входам первого сумматора подключены выходы трех датчиков: угловой скорости ω, курса судна ϕ, угла перекладки руля δ, в рулевом приводе формируется закон управления рулем:
dδзд./dt=Кϕ(ϕ-ϕзд.)+Kωω-Kδδ,
где ϕ - текущий курс судна, от датчика курса судна ϕ,
ϕзд. - заданный курс, из блока задания маневра идентификации ϕзд.,
ω - угловая скорость судна, от датчика угловой скорости ω,
δ - угол перекладки руля, от датчика угла перекладки руля δ,
dδзд./dt - заданная скорость перекладки руля,
отличающаяся тем, что дополнительно содержит блок памяти, девять сумматоров, два блока суммирования, десять множителей, блок сравнения, датчики: боковой скорости Vy, скорости хода судна Vx, углового ускорения dω/dt и бокового ускорения dVy/d, выход последнего подключен к первому входу первого блока суммирования, датчик боковой скорости Vy через первый множитель подключен к входу второго множителя, ко второму входу которого подключен гидродинамический коэффициент a11 из блока памяти, выход второго множителя подключен к первому входу второго сумматора, ко второму входу первого множителя подключен датчик скорости хода Vx, датчик угловой скорости ω через третий множитель подключен к входу четвертого множителя, выход четвертого множителя подключен ко второму входу второго сумматора, ко второму входу третьего множителя подключен датчик скорости хода Vx, ко второму входу четвертого множителя подключен гидродинамический коэффициент a12 с блока памяти, датчик угла перекладки руля δ через пятый множитель подключен к входу шестого множителя, выход шестого множителя подключен к третьему входу второго сумматора, ко второму входу пятого множителя подключен выход седьмого множителя, к обоим входам которого подключен датчик скорости хода Vx, ко второму входу шестого множителя подключен гидродинамический коэффициент a13 с выхода блока памяти, во втором сумматоре формируется правая часть первого уравнения математической модели движения судна:

где VxVy - продольная и поперечная скорость движения судна, поступают от датчиков Vx и Vy;
ω - угловая скорость, поступает от датчика ω;
δ - угол перекладки руля, поступает от датчика δ,
выход второго сумматора подключен ко второму входу первого блока суммирования, на выходе которого формируется невязка:

которая через блок коэффициента усиления идентификатора Ka11 подключается к первому входу третьего сумматора, ко второму входу которого подключен гидродинамический коэффициент a11 с выхода блока памяти, в третьем сумматоре формируется оценка корректированного гидродинамического коэффициента a
11.1:

выход третьего сумматора подключен к первому входу блока сравнения,
первый вход четвертого сумматора через блок коэффициента усиления идентификатора Ka12 подключается к выходу первого блока суммирования, ко второму входу четвертого сумматора подключен гидродинамический коэффициент a12 с блока памяти, в четвертом сумматоре формируется оценка корректированного гидродинамического коэффициента a
12.1:

выход четвертого сумматора подключен ко второму входу блока сравнения, первый вход пятого сумматора через блок коэффициента усиления идентификатора Ka13 подключен к выходу первого блока суммирования, ко второму входу пятого сумматора подключен гидродинамический коэффициент a13 с выхода блока памяти, в пятом сумматоре формируется оценка корректированного гидродинамического коэффициента a
13.1:

выход пятого сумматора подключается к третьему входу блока сравнения, в блоке сравнения формируют модули разности корректированных оценок, гидродинамических коэффициентов a
1i, полученных в данном цикле и коэффициентов a1i.0 - предыдущего цикла вычисления гидродинамических коэффициентов:
где a11 0, a12 0, a13 0 - гидродинамические коэффициенты предыдущего цикла вычислений, вводятся в блок сравнения из блока памяти, используя модули разностей в блоке сравнения, формируют три неравенства:
выход датчика углового ускорения dω/dt, подключен к первому входу второго блока суммирования, ко второму входу которого через шестой сумматор и множители подключены:
- датчик боковой скорости Vy через первый множитель и восьмой множитель (ко второму входу которого подключен гидродинамический коэффициент a
21 с блока памяти),
- датчик угловой скорости ω через третий множитель и девятый множитель (ко второму входу которого подключен гидродинамический коэффициент a
22 с блока памяти),
- датчик скорости хода Vx через два входа седьмого множителя, пятый множитель, ко второму входу которого подключен датчик перекладки руля δ и десятый множитель, ко второму входу которого подключен гидродинамический коэффициент a
23 (с блока памяти), на выходе второго блока суммирования формируется невязка:
которая через блок коэффициента усиления идентификатора Ka21, подключается к входу седьмого сумматора, ко второму входу которого подключен гидродинамический коэффициент a
21 с блока памяти,
в седьмом сумматоре формируется оценка корректированного гидродинамического коэффициента a
21.1:
a
21.1 = a
21 + Ka21 [dω/dt - (a
21VxVy + a
22Vx ω + a
23VxVx δ)],
выход седьмого сумматора подключается к четвертому входу блока сравнения, выход второго блока суммирования через блок коэффициента усиления идентификатора Ka22 подключается к входу восьмого сумматора, ко второму входу которого подключен гидродинамический коэффициент a
22 с блока памяти, в восьмом сумматоре формируется оценка корректированного гидродинамического коэффициента a
22.1:
a
22.1 = a
22 + Ka22 [dω/dt - (a
21VxVy + a
22Vx ω + a
23VxVx δ)],
выход восьмого сумматора подключен к пятому входу блока сравнения, выход второго блока суммирования через блок коэффициента усиления идентификатора Ka23 подключен к входу девятого сумматора, ко второму входу которого подключен гидродинамический коэффициент a
23 с блока памяти, в девятом сумматоре формируется оценка корректированного гидродинамического коэффициента a
23.1:
a
23.1 = a
23 + Ka23 [dω/dt - (a
21VxVy + a
22Vx ω + a
23VxVx δ)],
выход девятого сумматора подключен к шестому входу блока сравнения,
в блоке сравнения формируют модули разности корректированных гидродинамических коэффициентов a
2i.1, полученных в данном цикле и a2i.0 из предшествующего цикла вычисления
при этом в блоке сравнения три модуля разности используют для формирования трех неравенств:
удовлетворяются, то процесс идентификации всех гидродинамических коэффициентов математической модели успешно закончен, если хотя бы одно из шести неравенств не удовлетворяет условию
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 1999 |
|
RU2151713C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА | 2010 |
|
RU2444043C1 |
| Приспособление для выдавливания и дальнейшего транспортирования формовочных комов | 1983 |
|
SU1416268A1 |

