Область техники, к которой относится изобретение
Изобретение относится к выравниванию деформированных транспортных средств, таких как легковые автомобили, грузовые автомобили и подобные приводимые в движение двигателем наземные транспортные средства.
Уровень техники
Существуют способы обмера транспортных средств, которые позволяют определить, является ли транспортное средство деформированным, а также величину деформации. Например, компания «Car-o-Liner» в Швеции предлагает систему, называемую «Car-o-Tronic», в которой легковые автомобили обмеряются и данные обмера сравниваются с паспортными данными для конкретной модели легкового автомобиля. Паспортные данные для конкретной модели легкового автомобиля извлекаются из базы данных, содержащей исходные геометрические данные для обмеряемых точек для тысяч разных моделей легковых автомобилей. Если данные обмера не соответствуют извлеченным данным, то легковой автомобиль является деформированным. Если деформация велика, то легковой автомобиль нуждается в выравнивании.
Были предложены способы для выравнивания транспортных средств, согласно которым обеспечивают опору частей транспортного средства и прикладывают усилие, достаточно большое для деформирования транспортного средства, к другой части транспортного средства. Опоры должны быть достаточно жесткими, чтобы опирающиеся части не перемещались во время этапа деформирования.
Проблемой является наличие риска того, что опоры и опирающиеся части транспортного средства перемещаются при приложении усилия, в результате чего транспортное средство не деформируется в достаточной мере.
Последующий повторный обмер транспортного средства затем выявляет оставшуюся деформацию, и транспортное средство необходимо выравнивать еще раз.
Раскрытие изобретения
Изобретением предлагаются способ и конструкция для выравнивания транспортного средства, в которых устранены недостатки уровня техники.
Предлагается способ, согласно которому осуществляют мониторинг перемещений опирающихся частей. Способ выравнивания включает этапы, на которых обеспечивают опору первой части транспортного средства и деформируют транспортное средство путем приложения усилия к его второй части. Способ отличается тем, что помещают по меньшей мере один регистрирующий перемещение измерительный блок, содержащий по меньшей мере один акселерометр, на опирающуюся первую часть транспортного средства перед этапом деформирования и отслеживают перемещения опирающейся первой части транспортного средства во время деформирования с помощью этого измерительного блока. Опирающаяся часть, на которую помещают измерительный блок, не должна перемещаться, а должна оставаться неподвижной во время деформирования.
Путем отслеживания перемещений опирающейся части во время деформирования может быть выявлено недостаточное деформирование, а путем использования инерциального измерительного блока может быть определена величина недостаточности.
Предпочтительно, инерциальный измерительный блок, содержащий акселерометры и гироскопы, используют в качестве регистрирующего перемещение измерительного блока.
В одном варианте осуществления способ включает использование дополнительного регистрирующего перемещение измерительного блока, например, инерциального измерительного блока, и помещение второго инерциального измерительного блока на часть, перемещение которой ожидают во время деформирования, для возможности контроля деформирования.
В предпочтительном варианте осуществления способ включает этап отображения перемещений транспортного средства во время деформирования. Это позволяет осуществлять контроль процесса деформирования в режиме реального времени и быть уверенным, что ходовая часть деформируется так, как ожидается, и что нежелательная деформация или нежелательное перемещение не происходят во время приложения усилия. Мониторинг может осуществляться с использованием экрана дисплея, где показаны части ходовой части, которые должны перемещаться, а также показаны части транспортного средства, которые должны оставаться неподвижными, другим способом по сравнению с частями, которые должны перемещаться, с тем чтобы облегчить контроль процесса.
Предлагаемый способ использует регистрирующий перемещение измерительный блок, содержащий по меньшей мере один акселерометр, предпочтительно два или три. Один акселерометр может быть использован для отслеживания нежелательного перемещения, а использование более одного акселерометра, а также гироскопов обеспечивает более точный и надежный способ. Акселерометр или акселерометры могут сочетаться в измерительном блоке с по меньшей мере одним гироскопом, например с двумя или тремя; таким образом, три акселерометра могут сочетаться с одним, двумя или тремя гироскопами.
При обнаружении перемещения в части транспортного средства, которая должна оставаться неподвижной во время деформирования, пользователь может быть подходящим образом оповещен, а величина перемещения, например линейное расстояние или угол, может быть отображена, а также могут быть отображены ускорение и скорость.
Конструкция для выравнивания содержит по меньшей мере одну опору для обеспечения опоры по меньшей мере одной части транспортного средства во время деформирования и средства для приложения усилия ко второй части для деформирования транспортного средства. Конструкция отличается тем, что она содержит средства для отслеживания перемещений первой, опирающейся, части, содержащие по меньшей мере один акселерометр и предпочтительно представляющие собой инерциальный измерительный блок.
Краткое описание чертежей
Фигура 1 иллюстрирует конструкцию для выравнивания грузового автомобиля; конструкция обеспечивает опору двух частей грузового автомобиля и прикладывает деформирующее усилие к одной другой части грузового автомобиля.
Фигура 2 иллюстрирует вид сверху подобной конструкции.
Осуществление изобретения
Фигура 1 иллюстрирует конструкцию для выравнивания транспортного средства. Это упрощенная иллюстрация транспортного средства, на которой транспортное средство изображено в виде его рамы 2 и колес 6, 7. Конструкция включает средства 3, 4, 15 для выравнивания ходовой части (например, рамы) транспортного средства, включающие опоры 3, 4 и средства 15 для приложения усилия. Конструкция также включает средства 8, 9а-с для отслеживания перемещений, содержащие инерциальные измерительные блоки 9а-с и компьютер 8, причем инерциальные измерительные блоки соединены с компьютером с возможностью обмена данными. Каждый инерциальный измерительный блок 9а-с содержит акселерометры и гироскопы для регистрации его перемещения, а средства 8, 9а-с для отслеживания перемещения предпочтительно содержат, по существу известным образом, аппаратное и программное обеспечение для преобразования данных о перемещении в перемещения. Например, сигналы об ускорении от акселерометров в инерциальных измерительных блоках 9а-с преобразуются в данные о расстоянии, причем это преобразование включает двойное интегрирование ускорений. Данные о расстоянии передаются от каждого инерциального измерительного блока 9а-с компьютеру 8, который подходящим образом содержит дисплей, посредством которого определенные расстояния могут быть отображены для пользователя. Альтернативно, сигналы об ускорении передаются компьютеру 8, и компьютер преобразует их в данные о расстоянии.
Во время выравнивания деформированной рамы транспортного средства рама 2 опирается на опоры 3, 4, которые прикреплены к полу, а средства 15 для приложения усилия, например, использующие гидравлическое оборудование, расположены таким образом, чтобы прикладывать усилие к части рамы, которая является деформированной. Инерциальные измерительные блоки 9а-с помещают в разные места на раме 2, а затем средства 15 для приложения усилия активируют, и они давят на раму 2, удерживаемую опорами 3, 4, с достаточно большим усилием для ее деформирования, тем самым выравнивая ее до исходной прямолинейности. Во время этого процесса деформирования инерциальные измерительные блоки 9а-с отслеживают перемещения, а компьютер 8 отображает результаты. Три инерциальных измерительных блока расположены в разных местах на раме, при этом первый инерциальный измерительный блок 9а расположен вблизи первой опоры 3, а второй инерциальный измерительный блок 9b расположен вблизи второй опоры 4. Во время выравнивания рамы опоры 3, 4 должны оставаться неподвижными и первый, и второй инерциальные измерительные блоки 9а, 9b не должны обнаруживать какого-либо перемещения. Третий инерциальный измерительный блок 9с расположен на неопирающейся части рамы и должен регистрировать перемещение во время процесса выравнивания.
На фигуре 1 раму 2 выпрямляют посредством двух опор 3, 4 и одного средства для приложения усилия, давящего на раму в боковом направлении. Как известно в уровне техники может быть использовано другое число опор и средств для приложения усилия. Кроме того, может выполняться выправление других типов деформации. Например, вертикальная деформация транспортного средства, при которой одна часть деформирована вверх, может быть выправлена путем удержания деформированной части от перемещения вверх с помощью одной опоры и подъема вверх по обеим сторонам деформированной части с помощью средств для приложения усилия в форме двух подъемных устройств, таких как два гидравлических подъемника.
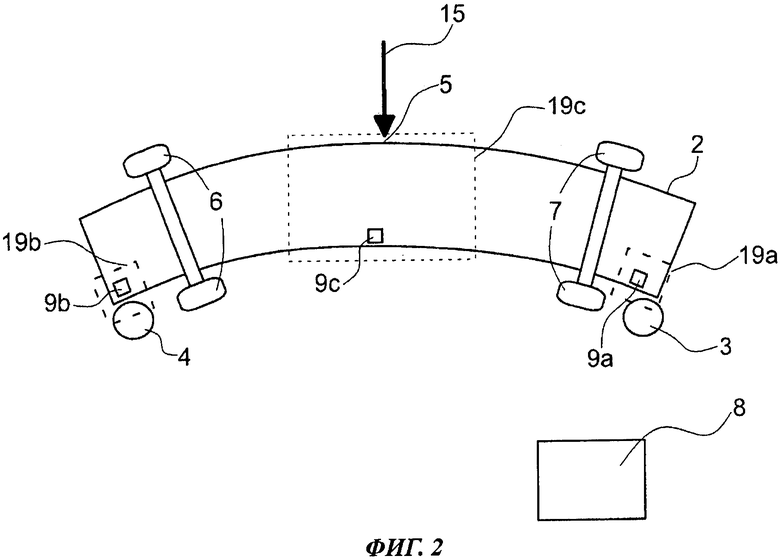
Фигура 2 иллюстрирует вид сверху деформации и конструкции для выравнивания, подобных тем, что показаны на фиг.1. Транспортное средство показано в виде его деформированной рамы 2 (деформация условно преувеличена) и передних и задних колес 6, 7. Рама 2 опирается левой стороной на две опоры 3, 4 вблизи передних и задних колес, соответственно. Усилие прикладывают к середине правой стороны рамы. Средства для отслеживания перемещения включают три инерциальных измерительных блока, присоединенных к компьютеру 8 с возможностью обмена данными.
Первый инерциальный измерительный блок 9а расположен вблизи опоры 3 в части 19а, которая должна оставаться неподвижной во время деформирования. Инерциальный измерительный блок 9а расположен в части, которая не должна перемещаться или должна перемещаться очень незначительно, поэтому, если имеет место перемещение, что означает, что процесс деформирования проходит неправильно, то это перемещение, а следовательно, неисправность, обнаруживается инерциальным измерительным блоком. Второй инерциальный измерительный блок 9b аналогичным образом расположен у другой опоры 4 в другой части 19b, которая не должна перемещаться или должна перемещаться очень незначительно во время деформирования. Если вторая опора 4 или опирающаяся часть 19b перемещается, то это перемещение обнаруживается вторым инерциальным измерительным блоком.
Третий инерциальный измерительный блок 9с расположен внутри части 19с рамы транспортного средства, которая искривлена или деформирована и нуждается в выравнивании. Таким образом, третий инерциальный измерительный блок 9с расположен в части 19с, которая должна перемещаться при приложении деформирующего усилия во время процесса деформирования для коррекции ее искривления.
Каждый инерциальный измерительный блок 9а-с обменивается данными с компьютером 8, который отображает их перемещения. Компьютер выполнен с возможностью мониторинга инерциальных измерительных блоков 9а-b, расположенных в частях, которые не должны перемещаться, а также с возможностью информирования оператора об их перемещении посредством визуальной или звуковой сигнализации. Компьютер может также быть выполнен с возможностью указания на дисплее того, какая часть переместилась, на какое расстояние и в каком направлении. Благодаря этому изобретение помогает корректировать процесс деформирования при обнаружении неправильно функционирующей опоры. Компьютер в еще одном варианте осуществления изобретения также выполнен с возможностью отображения перемещения третьего инерциального измерительного блока, расположенного в области, которая должна перемещаться во время процесса деформирования, на дисплее для оператора. Компьютер может подходящим образом быть выполнен с возможностью отображения изображения ходовой части и обновления этого изображения во время процесса таким образом, что оператор может следить за выравниванием рамы на этом изображении на дисплее. Это дает оператору улучшенный общий вид процесса и помогает управлять средствами для приложения усилия таким образом, чтобы обеспечить более точную настройку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРОВ КОНСТРУКЦИИ | 2009 |
|
RU2515961C2 |
| ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА ДЛЯ БЛОКА ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 1998 |
|
RU2219498C2 |
| Способ трекинга гибкого хирургического инструмента на основе инерциальных МЭМС датчиков | 2021 |
|
RU2767174C1 |
| АВТОНОМНЫЙ КАРДАННЫЙ ИНЕРЦИАЛЬНО-ИЗМЕРИТЕЛЬНЫЙ БЛОК С ОХЛАЖДЕНИЕМ ЗА СЧЕТ ТЕПЛОПРОВОДНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2736895C2 |
| ИНЕРЦИАЛЬНЫЙ БЛОК С ПОДВЕСНЫМ ИНЕРЦИАЛЬНЫМ УСТРОЙСТВОМ | 2018 |
|
RU2747441C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЗАИМНОЙ ОРИЕНТАЦИИ И ВЗАИМНОГО ПОЛОЖЕНИЯ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2017 |
|
RU2662455C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПОДЗЕМНЫХ ГОРНЫХ РАБОТ И СПОСОБ ЕГО ОРИЕНТАЦИИ | 2018 |
|
RU2768087C2 |
| Система бесключевого доступа к транспортному средству с дополнительной защитой от угона (PKES-плюс, варианты) | 2021 |
|
RU2763613C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА И УГЛОВОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ ФУНКЦИОНИРОВАНИЯ В ПОЛЯРНОЙ ОБЛАСТИ | 2018 |
|
RU2762143C2 |
Изобретение относится к обработке металлов давлением, в частности к способу и устройству для выравнивания транспортного средства. Обеспечивают опору первой части транспортного средства и деформируют транспортное средство путем приложения усилия к его второй части. Перед этапом деформирования на опирающуюся первую часть транспортного средства помещают по меньшей мере один регистрирующий перемещение измерительный блок, содержащий по меньшей мере один акселерометр, и отслеживают перемещения опирающейся первой части транспортного средства во время деформирования с помощью регистрирующего перемещение измерительного блока. Исключается повторное выравнивание транспортного средства. 2 н. и 13 з.п. ф-лы, 2 ил.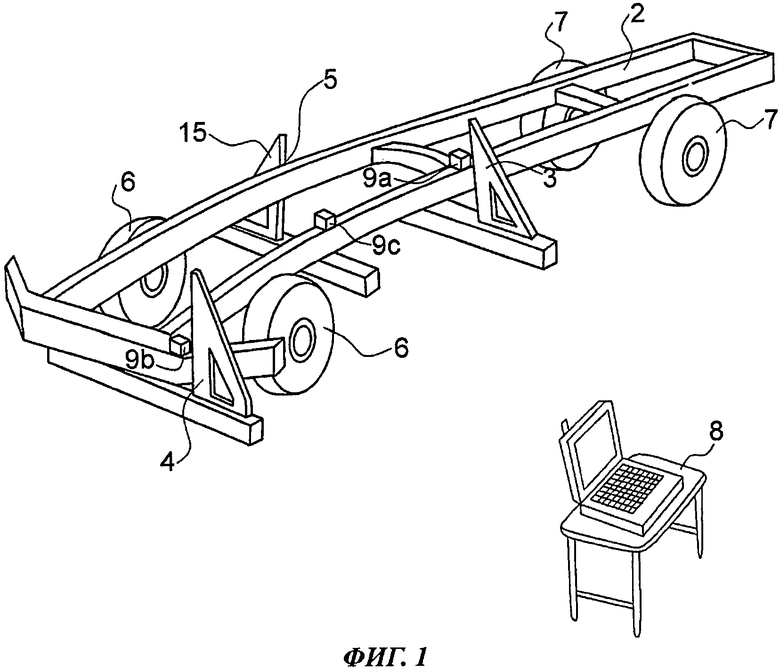
1. Способ выравнивания транспортного средства, в котором обеспечивают опору первой части (19А, 19В) транспортного средства, деформируют транспортное средство путем приложения усилия к его второй части (5), отличающийся тем, что помещают по меньшей мере один регистрирующий перемещение измерительный блок (9А, 9В), содержащий по меньшей мере один акселерометр, на опирающуюся первую часть (19А, 19В) транспортного средства перед деформированием, и отслеживают перемещения опирающейся первой части (19А, 19В) транспортного средства во время деформирования с помощью указанного измерительного блока (9А, 9В).
2. Способ по п.1, отличающийся тем, что он включает этап отображения перемещений транспортного средства во время деформирования.
3. Способ по п.1 или 2, отличающийся тем, что он включает этап выдачи сигнала, если отслеживаемые перемещения больше, чем предельное значение.
4. Способ по п.1 или 2, отличающийся тем, что он включает этап определения длины отслеживаемого перемещения.
5. Способ по п.1 или 2, отличающийся тем, что используют измерительный блок, представляющий собой инерциальный измерительный блок, содержащий несколько акселерометров, например три акселерометра, и несколько гироскопов, например три гироскопа.
6. Способ по п.1 или 2, отличающийся тем, что этап помещения включает помещение второго регистрирующего перемещение измерительного блока (9С), предпочтительно инерционного измерительного блока (9С), на ту часть (19С) транспортного средства, перемещение которой ожидают на этапе деформирования.
7. Способ по п.1 или 2, отличающийся тем, что этап отслеживания перемещений включает определение направления перемещения.
8. Устройство для выравнивания транспортного средства, содержащее по меньшей мере одну опору (3, 4) для обеспечения опоры по меньшей мере одной первой части транспортного средства, средства (15) приложения усилия ко второй части (5) транспортного средства, выполненные с возможностью деформирования транспортного средства, отличающееся тем, что оно содержит средства (8, 9А, 9В) отслеживания перемещения первой части (19А, 19В) транспортного средства во время деформирования транспортного средства, причем указанные средства включают по меньшей мере один регистрирующий перемещение измерительный блок (9А, 9В), включающий по меньшей мере один акселерометр.
9. Устройство по п.8, отличающееся тем, что средства (8, 9А, 9В, 9С) отслеживания перемещения содержат дисплей и выполнены с возможностью отображения перемещений во время деформирования.
10. Устройство по п.8 или 9, отличающееся тем, что средства (8, 9А, 9В) отслеживания перемещения содержат средства определения длины отслеживаемого перемещения.
11. Устройство по п.10, отличающееся тем, что средства (8, 9А, 9В) отслеживания перемещения выполнены с возможностью выдачи сигнала, если определенная длина больше, чем предельное значение.
12. Устройство по п.8, отличающееся тем, что измерительный блок представляет собой инерциальный измерительный блок (9А, 9В).
13. Устройство по п.8, отличающееся тем, что оно содержит средства (8, 9С) отслеживания перемещений третьей части (19С) транспортного средства во время деформирования транспортного средства, перемещение которой ожидают при деформировании, причем указанные средства содержат по меньшей мере один регистрирующий перемещение измерительный блок (9С), содержащий по меньшей мере один акселерометр.
14. Устройство по п.13, отличающееся тем, что регистрирующий измерительный блок представляет собой инерциальный измерительный блок (9С).
15. Устройство по п.13 или 14, отличающееся тем, что третья часть (19С) включает указанную вторую часть (5).
| Установка для контроля положения точек кузова транспортного средства при правке | 1989 |
|
SU1706742A1 |
| Измерительный блок инклинометра | 1991 |
|
SU1827541A1 |
| Автоматизированная поточная линия для правки крупногабаритных листовых заготовок | 1990 |
|
SU1808447A1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ДЕФОРМАЦИЙ ПОВРЕЖДЕННОГО КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2005 |
|
RU2314172C2 |
| . | |||

