Область техники
Настоящее изобретение относится к самолетостроению, а точнее к способу создания тяги, тяговым винтам и их приводам.
Предшествующий уровень техники
Из уровня техники не известно использование маховых движений лопастей тягового винта самолета.
Вместе с тем следует отметить, что известно использование маховых движений лопастей несущего винта для увеличения его подъемной силы, см., например, патент Великобритании GB 2470712, патент Китая CN 101492093 и патентная заявка Китая CN 102602537. Но эти известные способы создания подъемной силы и приводы несущих винтов не применимы для тяговых винтов из-за различий в конструкции и условий использования.
Раскрытие изобретения
Заявленное изобретение позволяет увеличить тягу, создаваемую тяговым винтом самолета.
Указанный технический результат достигается в способе создания тяги винтом, устанавливаемым на самолет, благодаря тому, что в течение времени совершения винтом поворота на 360° лопасти винта дополнительно совершают маховые движения в направлении, противоположном направлению тяги винта, и по направлению тяги винта, причем в направлении, противоположном направлению тяги винта, мах осуществляют со средней скоростью и ускорением, большими, чем по направлению тяги винта.
Средняя скорость и ускорение махового движения лопастей в направлении, противоположном направлению тяги винта, может быть больше средней скорости и ускорения махового движения лопастей в обратном направлении - направлении, совпадающем с направлением тяги винта, в 10 или более раз.
Маховые движения всех лопастей винта могут одновременно осуществляться в одном направлении, а затем в противоположном.
Указанный технический результат достигается устанавливаемым на самолете тяговым винтом с приводом, который дополнительно включает:
втулку, установленную на валу двигателя с возможностью скольжения вдоль вала, выполненную с торцевой рельефной поверхностью, контактирующей при вращении с рельефной поверхностью платформы, на которой установлен привод, и соединенной стержнями с втулкой винта, и
втулку, установленную на валу двигателя неподвижно между соединенными стержнями втулкой винта и втулкой с торцевой рельефной поверхностью и выполненную с направляющими для стержней, соединяющих эти втулки,
при этом втулка винта установлена на валу двигателя с возможностью скольжения вдоль вала и соединена с валом упругим элементом, прижимающим соединенные стержнями втулки к платформе, на которой установлен привод, а профиль контактирующих рельефных поверхностей при постоянной скорости вращения винта и в течение времени совершения втулкой винта поворота на 360° обеспечивает совершение маховых движений лопастями винта, причем со скоростью скольжения втулки и ускорением лопастей винта вдоль вала двигателя к платформе привода, большими, чем в противоположном направлении.
Указанный технический результат также достигается устанавливаемым на самолете тяговым винтом с приводом, включающим двигатель внутреннего сгорания, при этом лопасти винта установлены на втулке винта с возможностью поворота в плоскостях, перпендикулярных плоскости вращения винта, втулка винта выполнена с установленным в ее полости поршнем со штоками, поворачивающими лопасти при смещении поршня, а выпускные окна двигателя внутреннего сгорания соединены патрубком с полостью втулки винта для смещения выпускными газами поршня со штоками и совершения маховых движений лопастями винта.
Каждая лопасть винта образует рычаг, установленный с возможностью поворота на втулке винта. В частности, возможно взаимно расположить лопасть и шток так, что при смещении поршня под воздействием выпускных газов шток упирается в лопасть для совершения махового движения в направлении, противоположном смещению поршня со штоками.
Указанный технический результат также достигается устанавливаемым на самолете тяговым винтом с приводом, который дополнительно включает соленоид (электромагнитную катушку), а втулка винта содержит постоянный магнит и установлена с возможностью скольжения вдоль вала под воздействием соленоида, втягивающего втулку винта для совершения махового движения лопастями винта.
Краткое описание чертежей
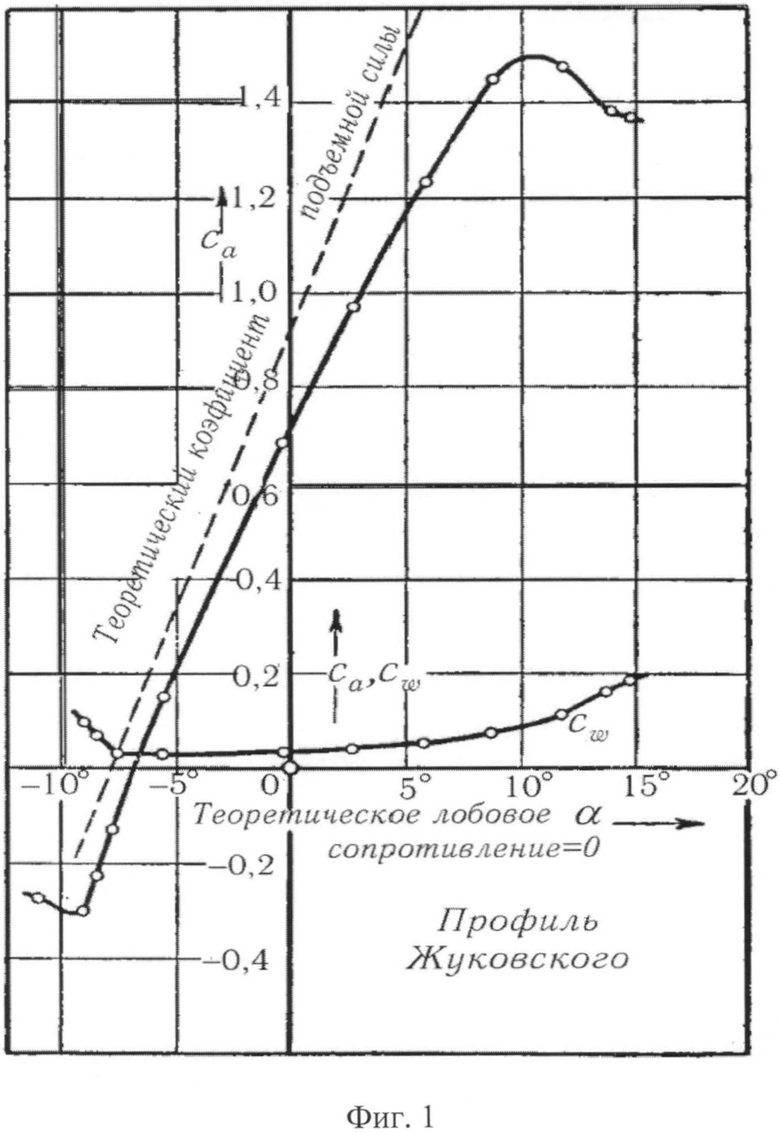
На фиг.1 представлены характерные зависимости коэффициентов подъемной силы Ca и сопротивления Cw от угла атаки α.
На фиг.2 представлен первый вариант выполнения тягового винта с приводом.
На фиг.3 представлен второй вариант выполнения тягового винта с приводом.
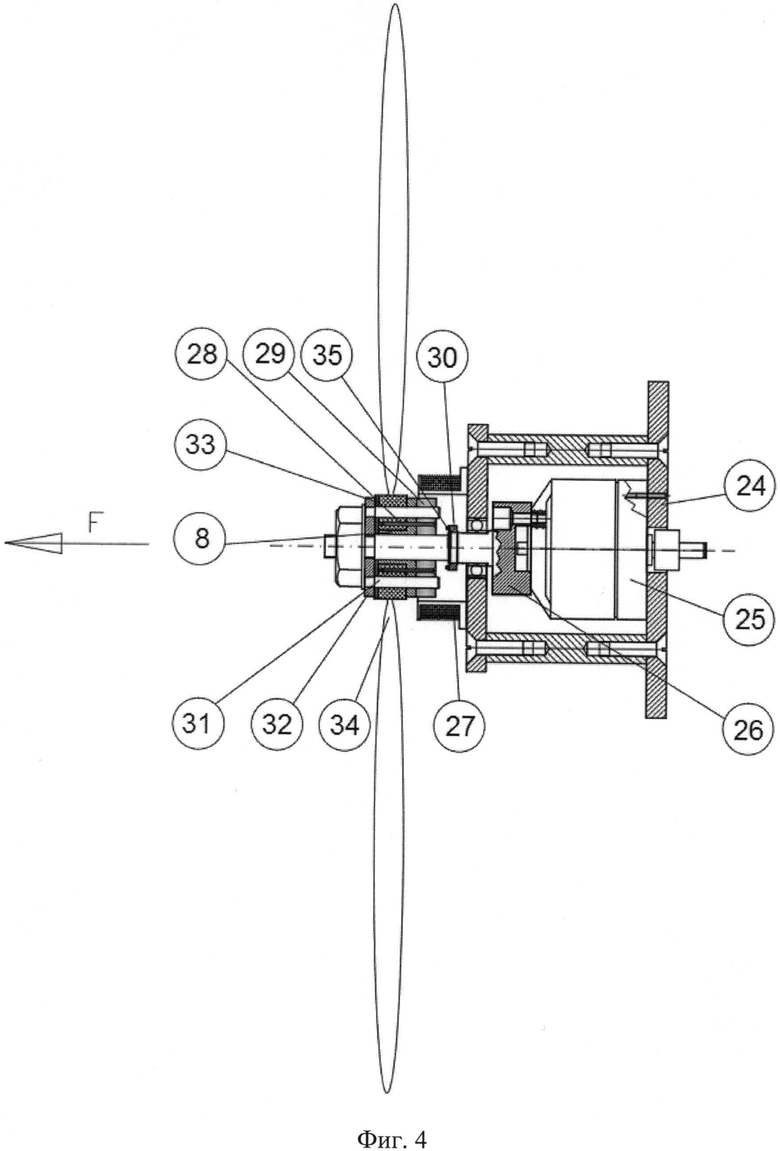
На фиг.4 представлен третий вариант выполнения тягового винта с приводом.
Реализация изобретения
Для понимания заявленного способа создания тяги винтом ниже приведен сравнительный расчет аэродинамической силы при стационарном обтекании лопасти винта и в режиме обтекания, дополненного резким опусканием лопасти. Расчет проведен для конкретных параметров стационарного обтекания профиля лопасти, вращающейся вокруг своей оси с числом оборотов в минуту n=10000 об/мин, что соответствует угловой скорости ω=1000 1/c.
Для оценки воздействия на сжимаемую среду используется так называемое характерное время T выравнивания давления около поверхности тела [Л.Д. Ландау, Е.М. Лифшиц. Теоретическая физика. Том 6. Москва, «Наука», 1986]:
Т=b/а,
где b - характерный размер (хорда); a - скорость звука.
Если время воздействия t<T, то воздействие рассматривается как удар. Изменение давления δР в сжимаемой среде при изменении скорости в этом случае определяется по формуле Жуковского Н.Е.:

где ρ - плотность среды; δV - изменение скорости течения среды.
Также Жуковский Н.Е. определил время фазы удара [Жуковский Н.Е. О гидравлическом ударе в водопроводных трубах, 1899]:
T=2b/a,
Если t<T, то изменение давления определяется по формуле (1),
Если t>T, то изменение давления определяется по следующей формуле:

Для выбранных значений параметров стационарного обтекания профиля лопасти, вращающейся вокруг своей оси, скорость средней точки лопасти:
v=ωr=1000*6*10-2=60 м/с.
Время прохождения расстояния, равного половине хорды лопасти:
t=b/2v=2*10-2/2*60=0,165*10-3 с.
При резком маховом движении лопасти, точнее средней точки лопасти, на l1=2 мм в направлении, противоположном направлению тяги винта, средняя скорость этого движения будет:
v=l1/2*t=2*10-3/0,165*10-3=6 м/с.
Тогда по формуле (2) под лопастью возрастет давление на величину
δP1=2*ρ*δV*b/t=2*1.2*6*2*10-2/0,165*10-3=1745 Па.
Над лопастью давление упадет на ту же величину:
δP2=-1745 Па.
Максимальный перепад давления на лопасти составит:
δP=δP1-δP2=3590 Па.
Среднее значение перепада давления за время перемещения лопасти на расстояние l1=2 мм составит:
δPср=δP/2=1745 Па.
Воздух под избыточным давлением будет стремиться обогнуть заднюю кромку лопасти и вызовет сходящий вихрь, интенсивность которого можно оценить по формуле:
Г1=δPср*l*b/(ρ*V*l)=1745*6*10-2*2*10-2/(1.2*60*12*10-2)=0.48 м2/с,
где l - длина лопасти, b - ширина лопасти (хорда).
По теореме Жуковского Н.Е. вокруг лопасти останется присоединенный вихрь, который будет иметь ту же интенсивность, что и сошедший вихрь, но направлен в противоположную сторону.
После резкого опускания «вниз» лопасть будет плавно подниматься в исходное положение за время, равное времени прохождения половины окружности средней точкой.
t=π*r/v==π*6*10-2/60=3.14*10-3 с.
Средняя скорость поднятия лопасти:
v=l1/2t=2*10-3/2*3.14*10-3=0.32 м/с.
Тогда по формуле (2) повышение давления над лопастью:
 .
.
Падение давления под лопастью:
δP1=-4.9 Па.
Максимальный перепад давления на лопасти составит:
δP=δP1-δP2=-9.8 Па.
Средний перепад давления на лопасти за время ее поднятия:
δPср=δP/2=-4.9 Па.
Это приведет к сходу «обратного» вихря интенсивностью:
 .
.
Интенсивность присоединенного вихря, вызванного резким движением лопасти «вниз», на несколько порядков больше интенсивности «обратного» сходящего вихря.
Поэтому в расчетах аэродинамической силы существенную роль играет присоединенный вихрь стационарного обтекания, образованный начальным сходящим вихрем, и присоединенный вихрь, образованный сходящим вихрем при резком движении «вниз».
Теперь рассчитаем аэродинамическую силу стационарного обтекания профиля Жуковского. На фиг.1 представлены характерные зависимости коэффициентов подъемной силы (Ca) и сопротивления (Cw) от угла атаки (a) для профиля крыла с острой задней кромкой.
Вместе с тем в литературе наиболее часто применяются следующие обозначения: коэффициент подъемной силы - Cy; коэффициент сопротивления - Cx.
Такое обозначение делает более понятным назначение этих коэффициентов, если расположить хорду крыла вдоль оси X, то подъемная сила будет направлена вдоль оси Y.
Поэтому в расчетах применены именно эти обозначения. Значения этих коэффициентов взяты из фиг.1 с учетом того, что Cy=Ca, а Cx=Cw. Коэффициент сопротивления Cx=Cw в расчетах не участвует из-за его малости.
Еще в расчете используются следующие обозначения:
v - скорость набегающего потока воздуха,
Г1 - дополнительная циркуляция потока воздуха вокруг профиля крыла, вызванного резким движением вниз,
Г2 - циркуляция потока воздуха вокруг профиля крыла при стационарном его обтекании.
R - подъемная аэродинамическая сила на единицу площади крыла.
Cy=1.18 при α=5°.
Подъемная сила на единицу площади лопасти:
R=Cy*ρ*v2/2=1.18*1.2*3600/2=2550 Па.
Циркуляция при стационарном обтекании составит:
Г2=R*b/(ρ*v)=0.71 м2/с.
Полная аэродинамическая сила на единицу площади крыла с учетом Г1 и Г2:
Rп=ρ*v*(Г2+Г1)/b=1.2*60*(0.71+0.48)/2*10-2=4284 Па.
При движении «вниз» угол атаки кратковременно увеличится на 5.7° и составит α=5°+5.7°=10.7°.
Коэффициент подъемной силы профиля Жуковского при 10.7° (см. фиг.1): Cy=1.45.
Подъемная сила на единицу площади лопасти при 10.7° в стационарном режиме составит:
R=Cy*ρ*v2/2=1.45*1.2*3600/2=3132 Па.
Получаем, что при дополнении стационарного движения резким движением лопасти «вниз» подъемная аэродинамическая сила увеличивается на 27%:
(4284-3132)/3132=0,27.
Кроме того, есть вероятность усиления циркуляции присоединенного вихря с каждым резким движением лопасти «вниз».
На фиг.2 представлен первый вариант устройства, реализующего заявленный способ создания аэродинамической тяги винта. F - направление тяги винта. Привод винта состоит из установленного на раме (платформе) 1 мотора 2 с валом 3. На раме 1 установлена охватывающая вал 3 пластина 4 с рельефной поверхностью. На валу 3 установлены с возможностью скольжения вдоль вала 3 втулка винта 5 и охватывающая вал 3 пластина 6, соединенные друг с другом гладкими шпильками 7. Конструкция из втулки винта 5, пластины 6 и шпилек 7 способна перемещаться вдоль вала как одно целое. Пластина 6 выполнена с рельефной поверхностью, обращенной к рельефной поверхности пластины 4 и являющейся ее зеркальной копией. На подвижной втулке винта 5 жестко закреплены лопасти 8 винта.
На валу 3 между втулкой винта 5 и пластиной 6 жестко закреплена втулка 9 с отверстиями, служащими направляющими для гладких шпилек 7. Во втулке 9 имеются зацепы (винты) 10 для соединения с помощью упругого элемента (резинового кольца) 11 с подвижной втулкой винта 5 (а вместе с ней лопасти 12 винта), так что упругий элемент (резиновое кольцо) 11 стремится притянуть втулку винта 5 к втулке 9, при этом рельефная поверхность пластины 6 упирается в рельефную поверхность пластины 4.
Большую часть рельефных поверхностей пластин 4 и 6 составляет плавный «подъем» на выступ, а меньшую часть - резкий «спуск» с выступа. За счет этого пластины 4 и 6 большую часть взаимного поворота на 360° отталкиваются друг от друга, плавно перемещая втулку винта 5 с лопастями винта 8 в направлении аэродинамической тяги винта. После контакта вершинами выступов рельефных поверхностей пластин 4 и 6 упругий элемент (резиновое кольцо) 11 резко притянет втулку винта 5 с лопастями винта 8 к втулке 9, прижимая рельефные поверхности пластин 4 и 6. Таким образом осуществится заявленный способ создания аэродинамической тяги, заключающийся в резком осуществлении маха лопастями винта в направлении, противоположном направлению тяги винта по сравнению с плавным возвращением лопастей винта по направлению тяги винта в исходное положение.
На фиг.3 представлен второй вариант устройства, реализующего заявленный способ создания аэродинамической тяги винта. F - направление тяги винта, Qвх - расход воздуха для работы двигателя, Qвых - выхлопные газы. Привод винта состоит из устанавливаемого на платформе двигателя внутреннего сгорания (ДВС) 12 вала 13. Втулка винта 14 выполнена с выступами (ушками) 15 с прорезями, в которых крепятся с возможностью поворота лопасти 16 винта, и полостью, в которой установлен поршень 17 со штоками 18, упирающимися в основания (комель) лопастей винта.
ДВС 12 выполнен с камерой 19 сбора отработанных газов из выпускных окон 20, соединенной патрубком 21 с коллектором 22, из которого отработанные газы поступают в полость втулки винта 14 и перемещают поршень 17 вдоль вала 13. Втулка винта выполнена с отверстиями для предотвращения сжатия газа под поршнем 17 и выхода отработанных газов после смещения поршня на заданное расстояние.
Во время работы двигателя внутреннего сгорания 12 вращается вал 13, а вместе с ним втулка винта 14 с лопастями 16. При открытии выпускных окон 20 отработанный газ (либо его часть) давит на поршень 17, который штоками 18 давит на основание (комель) лопастей 16. При этом лопасти 16 поворачиваются вокруг осей, установленных в выступах 15, совершая маховое движение в направлении, противоположном аэродинамической тяге F. При перемещении поршня 17 в крайнее положение отработанный газ выходит через открывающиеся отверстия из полости втулки винта 14. Затем под действием центробежной силы лопасти винта возвращаются в исходное положение.
На фиг.4 представлен третий вариант устройства, реализующего заявленный способ создания аэродинамической тяги винта. F - направление тяги винта. Привод винта состоит из установленного на раме (платформе) 24 мотора 25 (электромотор или двигатель внутреннего сгорания) с валом 26. На раме 24 установлен охватывающий вал 26 соленоид 27. На валу 26 установлена с возможностью скольжения вдоль него втулка винта 28 с постоянным магнитом 29, охватывающим вал 26. При этом на валу 26 с помощью стопорных колец закреплено упорное кольцо 30.
Втулка винта 28 установлена на направляющих - шпильках 31, закрепленных в шайбе 32, снабженной эластичным кольцом 33 и установленной в торце вала 26. На подвижной втулке винта 28 жестко закреплены лопасти 34 винта.
При вращении мотором вала 26 момент вращения передается через шайбу 32, направляющие шпильки 31 на втулку винта 28 с постоянным магнитом 29. Втулка винта 28 прижимается к шайбе 32 через резиновое кольцо 33 аэродинамической силой, возникающей при вращении винта.
При подаче напряжения на контакты соленоида 27 постоянный магнит 29 вместе с втулкой винта 28 втягивается внутрь соленоида вдоль вала 26 до упорного кольца 30.
При достижении упругого элемента 35 на упорном кольце 30 подача напряжения на соленоид 14 прекращается либо резко уменьшается и втулка винта 28 возвращается в исходное положение до упругого элемента 33 шайбы 32 под воздействием аэродинамической силы.
Скорости перемещения втулки винта и соответственно совершение маха лопастями винта регулируются путем изменения параметров подаваемого напряжения на соленоид.

Изобретение относится к области авиации, в частности к конструкциям винтов самолетов. Способ создания тяги винтом заключается в том, что в течение времени совершения винтом поворота на 360° лопасти винта дополнительно совершают маховые движения в направлении, противоположном направлению тяги винта, и по направлению тяги винта, причем в направлении, противоположном направлению тяги винта, мах осуществляют со средней скоростью, большей, чем по направлению тяги винта. Тяговый винт с приводом включает втулку, выполненную с торцевой рельефной поверхностью, контактирующей при вращении с рельефной поверхностью платформы, на которой установлен привод и соединенной стержнями с втулкой винта, и втулку, установленную на валу двигателя неподвижно. Профиль контактирующих рельефных поверхностей при постоянной скорости вращения винта в течение времени совершения втулкой винта поворота на 360° обеспечивает совершение маховых движений лопастями винта со скоростью скольжения втулки и ускорением лопастей винта вдоль вала двигателя к платформе привода, большими, чем в противоположном направлении. Втулка винта также может быть выполнена с установленным в ее полости поршнем со штоками, поворачивающими лопасти при смещении штока. Тяговый винт с приводом может содержать соленоид, а втулка винта может содержать постоянный магнит для совершения маховых движений лопастей. Достигается увеличение тяги винта. 4 н. и 3 з.п. ф-лы, 4 ил.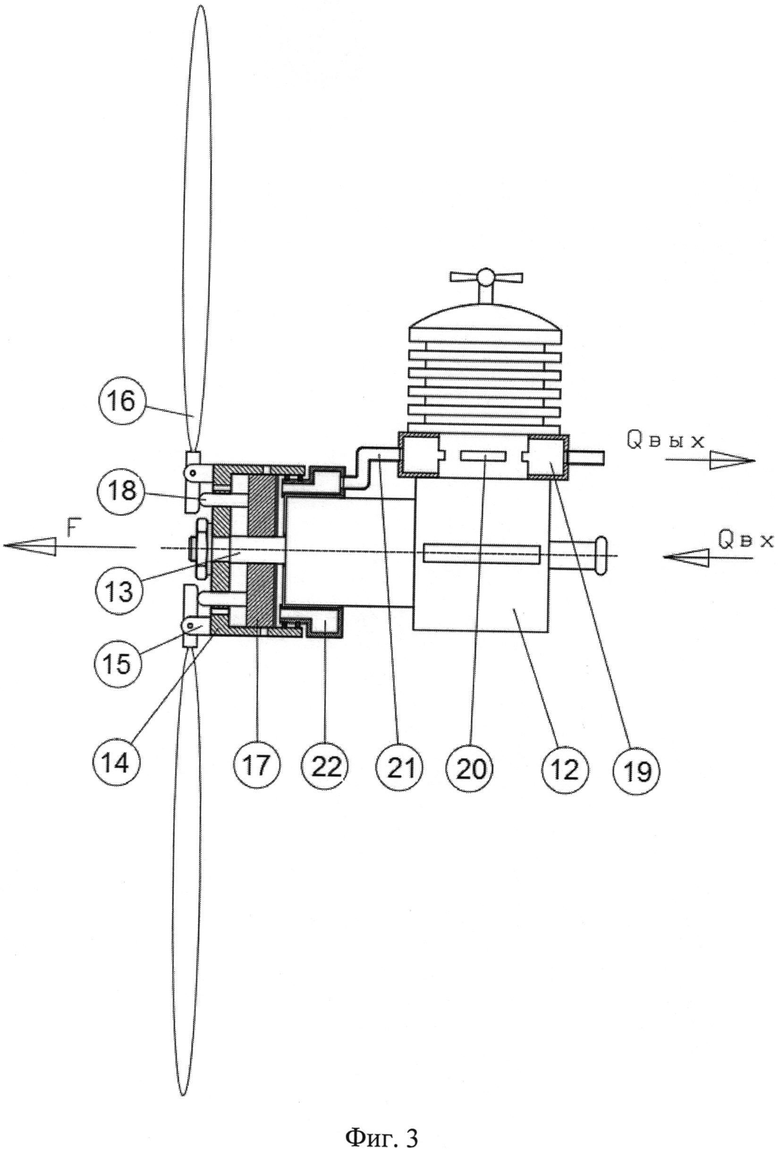
1. Способ создания тяги винтом, устанавливаемым на самолет, отличающийся тем, что в течение времени совершения винтом поворота на 360° лопасти винта дополнительно совершают маховые движения в направлении, противоположном направлению тяги винта, и по направлению тяги винта, причем в направлении, противоположном направлению тяги винта, мах осуществляют со средней скоростью и ускорением, большими, чем по направлению тяги винта.
2. Способ по п.1, отличающийся тем, что средняя скорость и ускорение махового движения лопастей в направлении, противоположном направлению тяги винта, больше средней скорости и ускорения махового движения лопастей в обратном направлении - направлении, совпадающем с направлением тяги винта, в 10 или более раз.
3. Способ по п.1, отличающийся тем, что маховые движения всех лопастей винта осуществляют синхронно.
4. Тяговый винт с приводом, включающий
втулку, установленную на валу двигателя с возможностью скольжения вдоль вала, выполненную с торцевой рельефной поверхностью, контактирующей при вращении с рельефной поверхностью платформы, на которой установлен привод, и соединенной стержнями с втулкой винта, и
втулку, установленную на валу двигателя неподвижно между соединенными стержнями втулкой винта и втулкой с торцевой рельефной поверхностью и выполненную с направляющими для стержней, соединяющих эти втулки,
при этом втулка винта установлена на валу двигателя с возможностью скольжения вдоль вала и соединена с валом упругим элементом, прижимающим соединенные стержнями втулки к платформе, на которой установлен привод,
а профиль контактирующих рельефных поверхностей при постоянной скорости вращения винта и в течение времени совершения втулкой винта поворота на 360° обеспечивает совершение маховых движений лопастями винта со скоростью скольжения втулки и ускорением лопастей винта вдоль вала двигателя к платформе привода, большими, чем в противоположном направлении.
5. Тяговый винт с приводом, включающим двигатель внутреннего сгорания, отличающийся тем, что
лопасти винта установлены на втулке винта с возможностью поворота в плоскостях, перпендикулярных плоскости вращения винта,
втулка винта выполнена с установленным в ее полости поршнем со штоками, поворачивающими лопасти винта при смещении поршня,
а выпускные окна двигателя внутреннего сгорания соединены патрубком с полостью втулки винта для смещения выпускными газами поршня со штоками и совершения маховых движений лопастями винта.
6. Тяговый винт с приводом по п.5, отличающийся тем, что каждая лопасть винта образует рычаг, установленный с возможностью поворота на втулке винта, и при смещении поршня под воздействием выпускных газов шток упирается в лопасть для совершения махового движения в направлении, противоположном смещению поршня со штоками.
7. Тяговый винт с приводом, включающим соленоид, при этом
втулка винта содержит постоянный магнит и установлена с возможностью скольжения вдоль вращающегося вала под воздействием соленоида, втягивающего втулку винта для совершения махового движения лопастями винта.
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| US 2011158808 A1, 30.06.2011 | |||
| RU 94007759 A1, 27.09.1996 | |||
| WO 2008032125 A2, 20.03.2008 | |||
| Механизм для поворота лопастей пропеллера | 1926 |
|
SU5371A1 |
| ДВИЖИТЕЛЬ ОРЛОВА В.П. | 1998 |
|
RU2160188C2 |

