Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных физических величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления объектами, склонными к колебаниям.
Высокоточное управление динамическими объектами управления актуально во многих отраслях промышленности, техники, технологии и науки. Эти задачи решаются с помощью систем автоматического регулирования с отрицательной обратной связью, в которых осуществляются соответствующие изменения входных управляющих сигналов, поступающих на объект управления для обеспечения требуемого значения выходных величин объекта управления. Зависимость выходной величины объекта управления от входного сигнала определяется его математической моделью. Часто используются модели в виде амплитудно-частотных и фазочастотных характеристик, то есть зависимости амплитуды и фазы выходного сигнала от частоты входного сигнала. Как правило, с ростом частоты амплитудная характеристика уменьшается, а фазовый сдвиг возрастает по величине, оставаясь отрицательным. Такие характеристики можно отождествить с характеристиками фильтров низких частот. Однако встречаются объекты управления, склонные к колебаниям выходной величины.
Для решения задачи управления такими объектами управления могут применяться системы с обратной связью, содержащие традиционные пропорционально-интегрально-дифференцирующие регуляторы (ПИД-регуляторы), имеющие пропорциональный (П), интегрирующий (И) и дифференцирующий (Д) тракты. Коэффициенты этих трактов рассчитываются разными методами, например методами численной оптимизации [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр.24-29. URL: http://www.nips.ru/images/stories/zhournal-AIPI/3/Paper-2013-1-4.pdf].
Известна система с обратной связью, содержащая: последовательно включенные в замкнутый контур регулятор объект управления и вычитающее устройство, включенное через его отрицательный вход, в котором положительный вход является входом системы, а выход объекта управления является выходом системы [А.С. Востриков, Г.А. Французова, Е.Б. Гаврилов. Основы теории непрерывных и дискретных систем регулирования. 5-е изд., перераб. и доп.: учебное пособие. Новосибирск: Изд-во НГТУ, 2008 г., стр.122, рис.4.31].
Устройство работает следующим образом.
Целью работы системы является обеспечение наиболее близкого совпадения значения выходной величины с входным сигналом. Выходной сигнал Y с выхода объекта управления поступает на отрицательный вход вычитающего устройства, на положительный вход которого поступает входной сигнал системы V. Вычисляемая разница этих сигналов, называемая ошибкой E, поступает на регулятор, который преобразует этот сигнал в управление U. Как правило, преобразование состоит в умножении на большой коэффициент. Также для обеспечения устойчивости в сигнал управления регулятор добавляет компоненту, пропорциональную производной ошибки, а для обеспечения высокой точности статического режима добавляется компонента, пропорциональная интегралу ошибки. Таким образом, общий вид выходного сигнала ПИД-регулятора задается уравнением:

Здесь Kp, KI, KD - коэффициенты усиления пропорционального, дифференцирующего и интегрирующего каналов регулятора. Проектирование регулятора состоит в этом случае в вычислении таких значений этих коэффициентов, которые обеспечат требуемое быстродействие, точность и устойчивость системы. Например, они могут быть рассчитаны методом численной оптимизации [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр.24-29. URL: http://www.nips.ru/images/stories/zhoumal-AIPI/3/Paper-2013-1-4.pdf].
Недостаток такой системы состоит в чрезвычайно большой (до 200%) динамической ошибке. Это проявляется в том, что переходный процесс на ступенчатое изменение входного сигнала V первоначально может быть направлен даже в сторону, противоположную требуемому направлению изменения выходной величины Y, и достигать значения -100% вместо +100% от предписанной величины V.
Таким образом, хотя установившееся значение переходного процесса соответствует требованиям, предъявляемым к системе, динамическая (начальная) часть переходного процесса крайне неудовлетворительна.
Известна другая система с обратной связью, принятая за прототип, содержащая последовательно включенные в замкнутый контур регулятор, компенсирующее звено, объект управления и вычитающее устройство, включенное через его отрицательный вход, в котором положительный вход вычитающего устройства является входом системы, а выход объекта управления является выходом системы [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр.28, рис.11. URL: 3-1-4.pdf].
Эта система работает следующим образом.
Объект управления обладает колебательными свойствами, поскольку в знаменателе его передаточной функции стоит нежелательный полином. Компенсирующее звено компенсирует нежелательный полином знаменателя передаточной функции объекта управления за счет того, что такой же полином содержится в числителе передаточной функции этого компенсирующего звена, включаемого на входе объекта управления. При этом в знаменателе этого компенсирующего звена помещается желательный полином, обеспечивающий более благоприятный переходный процесс. С этой целью можно использовать, например, полином той же степени с отрицательными действительными корнями. Такой желательный полином гарантирует отсутствие колебательных свойств. При последовательном включении компенсирующего звена и объекта управления их передаточные функции перемножаются, итоговая передаточная функция такого соединения равна произведению этих передаточных функций. В этом случае числитель компенсирующего звена приблизительно сокращается со знаменателем передаточной функции объекта управления.
Полученное соединение объекта управления совместно с компенсатором можно рассматривать как новый составной объект управления, для которого можно осуществить численную оптимизацию регулятора. При этом будет достигнута достаточная динамическая точность, поскольку переходный процесс пойдет требуемым путем.
Недостатком этой системы является невозможность одновременного достижения высокой статической и динамической точности при управлении объектами управления, склонными к колебаниям.
Причиной этого является невозможность полной компенсации знаменателя передаточной функции объекта управления числителем передаточной функции компенсирующего звена. Невозможность полной компенсации особенно сильно проявляется на частоте, соответствующей частоте собственных колебаний объекта управления.
Поэтому компенсирующее звено достаточно эффективно обеспечивает улучшение динамических свойств системы с обратной связью, на время начала переходного процесса. Но после того как предписанная величина будет достигнута, значение ошибки снизится до малой величины, начнет сказываться неустойчивость системы на критических частотах, возникнут и станут увеличиваться по величине колебания на частоте собственных колебаний объекта управления. После достижения нулевого значения ошибки выходной сигнал системы начинает колебаться около равновесного состояния с возрастающей амплитудой. Поэтому в такой системе с обратной связью резко ухудшается статическая точность, фактически система становится неустойчивой. Моделирование подтверждает, что в переходном процессе, начиная с некоторого времени, начинаются колебания, которые постепенно увеличиваются по амплитуде. Такая система является неустойчивой, хотя начальный этап переходного процесса соответствует предъявляемым требованиям, в целом система неудовлетворительна. Более того, точное соответствие коэффициентов обеспечить практически невозможно. А при отличии хотя бы одного коэффициента компенсатора на 0,5% в любую сторону эти колебания начинаются раньше и возрастают быстрее.
С другой стороны, в этой системе с обратной связью можно обеспечить устойчивость и требуемую статическую точность, например, если модель компенсирующего звена приравнять к единичной передаточной функции. В этом случае система станет идентичной ранее рассмотренной системе, которая обладает требуемой устойчивостью и статической точностью, но не обладает желаемой динамической точностью.
Таким образом, в рассмотренной системе с обратной связью невозможно одновременное достижение повышения динамической точности без ухудшения статической точности при управлении объектами управления, склонными к колебаниям.
Предлагаемое изобретение решает задачу одновременного повышения статической и динамической точности при управлении объектами управления, склонными к колебаниям.
Поставленная задача решается тем, что в систему с обратной связью, содержащую последовательно включенные объект управления, вычитающее устройство по отрицательному входу, регулятор и компенсирующее звено, причем положительный вход вычитающего устройства является входом системы, выход объекта управления является выходом системы, введены дополнительный регулятор, коммутирующее устройство и анализатор входного сигнала, причем первый вход коммутирующего устройства соединен с выходом компенсирующего звена, второй его вход соединен через дополнительный регулятор с выходом вычитающего устройства, третий его вход является управляющим и соединен через анализатор входного сигнала с входом системы, а выход коммутирующего устройства соединен со входом объекта управления.
Также в системе коммутирующее устройство может содержать формирователь единичного сигнала, вычитающее устройство, два умножителя сигналов и сумматор, причем, выход вычитающего устройства соединен с входом первого умножителя сигналов, положительный вход вычитающего устройства соединен с выходом формирователя единичного сигнала, отрицательный вход вычитающего устройства соединен выходом второго умножителя сигналов и является управляющим входом этого коммутирующего устройства, вторые входы умножителей сигналов являются входами этого коммутирующего устройства, выходы этих умножителей сигналов соединены с входами сумматора, а выход сумматора является выходом коммутирующего устройства.
Предлагаемая система с обратной связью приведена на Фиг.1. Коммутирующее устройство может быть выполнено, как показано на Фиг.2. На Фиг.3 показан результат моделирования такой системы для случая, когда коммутирующее устройство подключает на выход только второй вход. На Фиг.4 показан результат моделирования такой системы для случая, когда коммутирующее устройство подключает на выход только первый вход. На Фиг.5 показан результат моделирования такой системы для случая, когда коммутирующее устройство управляется анализатором входного сигнала и подключает на выход поочередно второй и первый входы.
Предлагаемая система с обратной связью (Фиг.1) содержит:
1 - объект управления,
2 - регулятор,
3 - вычитающее устройство,
4 - компенсирующее звено,
5 - дополнительный регулятор,
6 - коммутирующее устройство,
7 - анализатор входного сигнала.
При этом положительный вход вычитающего устройства 3 является входом системы с обратной связью, выход объекта управления 1 является выходом этой системы с обратной связью. Объект управления 1, вычитающее устройство 3 по отрицательному входу, регулятор 2 и компенсирующее звено 4 включены последовательно. Выход компенсирующего звена 4 через коммутирующее устройство 6 соединен с входом объекта управления 1. Выход вычитающего устройства 3 через дополнительный регулятор 5 соединен со вторым входом коммутирующего устройства 6. Вход объекта управления 1 через анализатор входного сигнала 7 соединен с управляющим входом коммутирующего устройства 6.
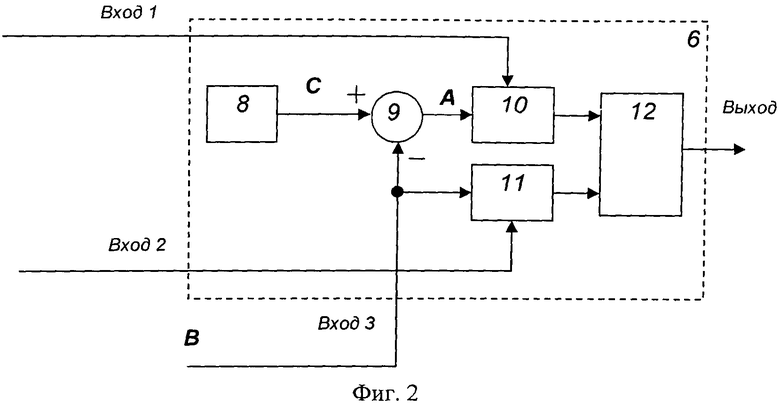
Коммутирующее устройство 6 (Фиг.2) может содержать:
8 - формирователь единичного сигнала,
9 - вычитающее устройство,
10 и 11 - умножители сигналов,
12 - сумматор.
Первым и вторым входами коммутирующего устройства 6 являются первые входы умножителей сигналов 10 и 11, третий вход коммутирующего устройства 6 соединен со вторым входом второго умножителя сигналов 11 и через вычитающее устройство 9, по его отрицательному входу, - со вторым входом первого умножителя сигналов 10, положительный вход вычитающего устройства 9 соединен с выходом формирователя единичного сигнала 8, выходы умножителей сигналов подключены к сумматору 12, выход которого является выходом коммутирующего устройства 6.
Все элементы системы, кроме объекта управления 1, могут быть реализованы на аналоговой или цифровой технике. В частности, регулятор 2 и дополнительный регулятор 5 могут быть ПИД-регуляторами. Объектом управления может быть любое техническое устройство, имеющее вход и выход, в том числе, объект управления, обладающий резко выраженными колебательными свойствами. Компенсирующее звено 4 может в числителе содержать знаменатель передаточной функции объекта управления 1, а в знаменателе - желательный полином, то есть полином того же порядка с действительными отрицательными корнями. Регулятор 2 может быть, например, ПИД-регулятором, параметры которого рассчитаны методом численной оптимизации при использовании объекта управления 1 совместно с компенсирующим звеном 4. Дополнительный регулятор 5 может быть, например, ПИД-регулятором, параметры которого рассчитаны методом численной оптимизации при использовании объекта управления 1 без компенсирующего звена 4.
Предлагаемая система с обратной связью работает следующим образом. Регулятор 2 совместно с компенсирующим звеном 4 настраивается так, как в прототипе, для обеспечения требуемой динамической точности. Дополнительный регулятор 5 настраивается методом численной оптимизации, как в первой описанной системе, для обеспечения требуемой статической точности. Коммутирующее устройство 6 за счет действия анализатора входного сигнала 7, управляющего его работой, обеспечивает первоначальное подключение на вход объекта управления 1 выхода компенсирующего устройства 4, а по окончании переходного процесса подключает вместо этого выхода выход дополнительного регулятора 5. Поэтому в начале переходного процесса в системе действует регулятор 2 с компенсирующим звеном 4, как в прототипе, а по окончании переходного процесса действует дополнительный регулятор 5, как в первой описанной системе, что обеспечивает вначале переходный процесс как в прототипе, а в конце переходный процесс как в первой системе. Таким образом, вначале достигается требуемая динамическая точность, а в конце достигается требуемая статическая точность. Если работает только один из регуляторов, как в первой рассмотренной системе и как в прототипе, то невозможно обеспечить достаточно высокую динамическую точность и одновременно достаточно высокую статическую точность, если объект управления 1 склонен к колебаниям, то есть содержит в полиноме передаточной функции нежелательный полином.
Таким образом, данная система обеспечивает совмещение повышенной динамической точности и повышенной статической точности. Тем самым поставленная задача решена.
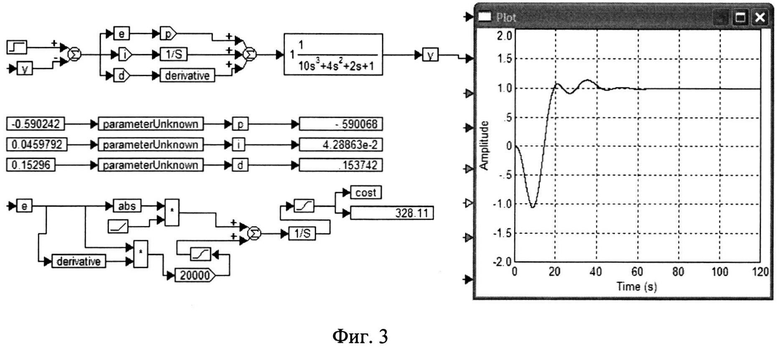
Для иллюстрации на Фиг.3 приведен результат моделирования такой системы в случае, когда коммутирующее устройство 6 замыкает на свой выход только свой второй вход, для объекта управления, имеющего передаточную функцию следующего вида:

Здесь s - аргумент преобразования Лапласа, аналогичный оператору дифференцирования при описании объекта управления в форме дифференциальных уравнений. В этом режиме в системе с обратной связью работает только дополнительный регулятор 5, а регулятор 2 с компенсирующим звеном 4 не участвуют в работе системы с обратной связью. Такой режим обеспечивает достаточную статическую точность, но недостаточную динамическую точность.
Кроме основных элементов на Фиг.3 приведены элементы для численной оптимизации коэффициентов дополнительного регулятора 5, а также показан вид переходного процесса. Идеальный переходный процесс должен, начинаясь от нуля, плавно двигаться в направлении значения единицы и остаться на этом значении с минимальным отклонением.
Переходный процесс, показанный на Фиг.3 на выходе системы в режиме, когда коммутирующее устройство 6 соединяет свой первый вход с выходом, первоначально движется в противоположную сторону, к значению минус единицы и далее, после чего движется в нужном направлении, и, совершив несколько колебаний около предписанного значения, завершается там, где следует.
Таким образом, в этом режиме, показанном на Фиг.3, достигается высокая статическая точность, но недостаточная динамическая точность.
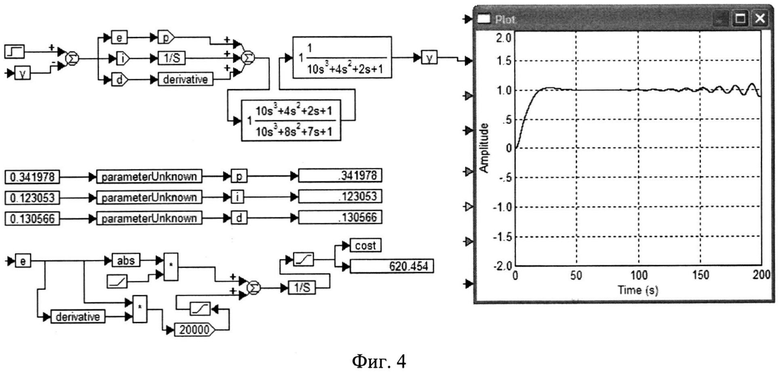
Если коммутирующее устройство 6 замыкает на выход свой первый вход, то в работе системы принимает участие регулятор 2 и компенсирующее звено 4, а дополнительный регулятор 5 не принимает участия в работе системы с обратной связью. Компенсирующее звено 4 компенсирует нежелательный полином знаменателя передаточной функции объекта управления за счет того, что такой же полином содержится в числителе передаточной функции этого звена, включаемого на входе объекта управления. При этом в знаменателе этого звена помещается желательный полином, обеспечивающий более благоприятный переходный процесс. С этой целью можно использовать, например, полином той же степени с отрицательными действительными корнями. Такой полином гарантирует отсутствие колебательных свойств. При последовательном включении компенсирующего звена 4 и объекта управления 1 их передаточные функции перемножаются, итоговая передаточная функция такого соединения равна произведению этих передаточных функций. В этом случае числитель компенсирующего звена 4 приблизительно сокращается со знаменателем передаточной функции объекта управления 1.
Для иллюстрации действия этого компенсирующего звена на Фиг.4 показана схема моделирования системы в этом режиме с полученным переходным процессом. В этом режиме коммутирующее устройство 6 подключает выход компенсирующего звена 4 к входу объекта управления 1, а дополнительный регулятор 5 при этом отключен. На графике переходного процесса, показанного на Фиг.4, видно, что с начала переходного процесса он идет в нужном направлении, от нулевого значения к единичному. Перерегулирование отсутствует, переходный процесс плавный. Тем самым в системе достигается достаточная динамическая точность. Но в системе с обратной связью, которая реализует только этот режим, невозможно достичь требуемой статической точности. На этом же графике переходного процесса на Фиг.4 видно, что, начиная с сотой секунды, возникают колебания, которые постепенно увеличиваются по амплитуде. Если бы система с обратной связью оставалась только в этом режиме, она была бы неустойчивой, хотя начальный этап переходного процесса соответствует предъявляемым требованиям, в целом система с обратной связью работала бы неудовлетворительно, если бы реализовался только этот режим, показанный на Фиг.4.
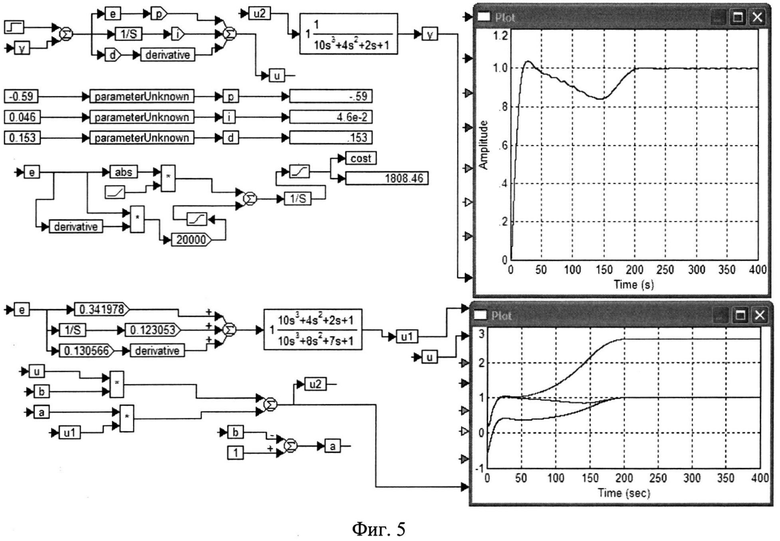
На Фиг.5 показан результат полного моделирования работы всей предлагаемой системы в программе VisSim 6.0. Переключение коммутирующего устройства 6 осуществляется действием анализатора входного сигнала 7. На начальном участке переходного процесса действует тракт, содержащий регулятор 2 и компенсирующее звено 4, а на конечном участке переходного процесса действует тракт, содержащий дополнительный регулятор 5. Из графика переходного процесса на этой Фиг.5 видно, что переходный процесс движется изначально в правильном направлении от нуля к единичному значению и достаточно быстро достигает предписанного единичного значения. Это соответствует повышенной динамической точности. После этого от воздействия анализатора входного сигнала 7 коммутирующее устройство 6 срабатывает, отключая от своего выхода первый вход и подключая нему второй свой вход, поэтому управление в системе с обратной связью передается дополнительному регулятору 5, рассчитанному по методу численной оптимизации, без использования компенсирующего звена 4. В этом режиме на завершающем этапе переходного процесса и после его окончания система с обратной связью становится устойчивой, то есть в ней обеспечивается повышенная статическая точность. Переходный процесс в момент переключения вызывает ошибку выходной величины (отклонение от предписанного единичного значения) менее 20%. Путем обеспечения плавного переключения можно дополнительно снижать эту ошибку.
Коммутирующее устройство 6 работает следующим образом. Анализатор входного сигнала 7 вначале переходного процесса формирует нулевой сигнал В, а по истечении некоторого времени этот сигнал медленно нарастает вплоть до значения единицы. Например, это устройство может быть выполнено на основе интегратора сигнала с встроенным ограничителем выходного сигнала. Формирователь единичного сигнала 8 всегда формирует сигнал единицы C=1, который поступает на положительный вход вычитающего устройства 9, на отрицательный вход которого поступает сигнал B с выхода анализатора входного сигнала 7, первоначально равный нулю, но впоследствии достигающий значения единицы. Таким образом, на выходе вычитающего устройства 9 формируется сигнал A, равный разнице между единицей и выходным сигналом анализатора входного сигнала 7. Коммутирующее устройство 6 должно коммутировать на выход сначала сигнал управления от входа 1, а затем - сигнал управления от входа 2. Это обеспечивается тем, что на выход коммутирующего устройства 6 подается сумма произведений сигналов, поступающих на входы 1 и 2, умноженных, соответственно, на сигналы A и B, при этом каждый из этих сигналов, А и B, изменяется от нуля до единицы, а их сумма всегда равна единице. Значение выходного сигнала равно:

Здесь U1 и U2 - сигналы управлений, поступающих на входы 1 и 2. Операции умножения сигналов осуществляются на умножителях сигнала 10 и 11. Суммирование результатов осуществляется сумматором 12.
Поскольку в начале сигнал U1 равен единице, а впоследствии достигает нулевого значения, а сигнал U2 - наоборот, вначале равен нулю, а впоследствии достигает единичного значения, соотношение (3) обеспечивает, что на начальном этапе на вход объекта управления поступает сигнал U1, в конце переходного процесса на вход объекта управления поступает сигнал U2, а в середине переходного процесса - смесь этих сигналов с соответствующими весовыми коэффициентами, в сумме равными единице.
Одновременное повышение статической и динамической точности обеспечивается благодаря использованию на двух разных участках переходного процесса двух разных регуляторов, что обеспечено введением дополнительных элементов и их соединением, а именно: введенный дополнительный регулятор 5 позволяет решить задачу повышения статической точности без ухудшения динамической точности, то есть повысить одновременно и статическую и динамическую точность. Коммутирующее устройство 6 позволяет осуществлять переключение, требуемое для того, чтобы в начале переходного процесса действовал регулятор 2 и компенсирующее звено 4, а в конце переходного процесса действовал дополнительный регулятор 5. Анализатор входного сигнала 7 осуществляет управление коммутирующим устройством 6 на основании анализа сигналов.
Таким образом, предлагаемое изобретение решает задачу одновременного повышения статической и динамической точности при управлении объектами управления, склонными к колебаниям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2015 |
|
RU2584925C1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2541684C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2017 |
|
RU2659370C1 |
| Система с обратной связью | 2021 |
|
RU2756229C1 |
Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных физических величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления объектами управления, склонными к колебаниям. Система с обратной связью содержит последовательно включенные объект управления, вычитающее устройство по отрицательному входу, регулятор и компенсирующее звено. Причем положительный вход вычитающего устройства является входом системы, выход объекта управления является выходом системы, при этом в нее введены дополнительный регулятор, коммутирующее устройство и анализатор входного сигнала. Первый вход коммутирующего устройства соединен с выходом компенсирующего звена, второй его вход соединен через дополнительный регулятор с выходом вычитающего устройства, третий его вход является управляющим и соединен через анализатор входного сигнала с входом системы, а выход коммутирующего устройства соединен со входом объекта управления. Коммутирующее устройство содержит формирователь единичного сигнала, вычитающее устройство, два умножителя сигналов и сумматор, причем, выход вычитающего устройства соединен с входом первого умножителя сигналов, положительный вход вычитающего устройства соединен с выходом формирователя единичного сигнала, отрицательный вход вычитающего устройства соединен выходом второго умножителя сигналов и является управляющим входом этого коммутирующего устройства, вторые входы умножителей сигналов являются входами этого коммутирующего устройства, выходы этих умножителей сигналов соединены с входами сумматора, а выход сумматора является выходом коммутирующего устройства. Технический результат заключается в повышении статической и динамической точности при управлении объектами управления, склонными к колебаниям. 1 з.п. ф-лы, 5 ил.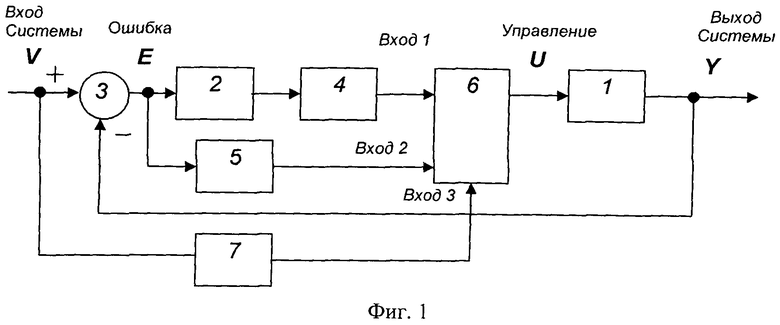
1. Система с обратной связью, содержащая последовательно включенные объект управления, вычитающее устройство по отрицательному входу, регулятор и компенсирующее звено, причем положительный вход вычитающего устройства является входом системы, выход объекта управления является выходом системы, отличающаяся тем, что в нее введены дополнительный регулятор, коммутирующее устройство и анализатор входного сигнала, причем первый вход коммутирующего устройства соединен с выходом компенсирующего звена, второй его вход соединен через дополнительный регулятор с выходом вычитающего устройства, третий его вход является управляющим и соединен через анализатор входного сигнала с входом системы, а выход коммутирующего устройства соединен со входом объекта управления.
2. Система с обратной связью по п.1, отличающаяся тем, что коммутирующее устройство содержит формирователь единичного сигнала, вычитающее устройство, два умножителя сигналов и сумматор, причем, выход вычитающего устройства соединен с входом первого умножителя сигналов, положительный вход вычитающего устройства соединен с выходом формирователя единичного сигнала, отрицательный вход вычитающего устройства соединен с входом второго умножителя сигналов и является управляющим входом этого коммутирующего устройства, вторые входы умножителей сигналов являются входами этого коммутирующего устройства, выходы этих умножителей сигналов соединены с входами сумматора, а выход сумматора является выходом коммутирующего устройства.
| Власов К.П | |||
| Теория автоматического управления, Учебное | |||
| пособие | |||
| Харьков: Издательство Гуманитарный центр, 2007, стр | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
| US 6961626 B1, 01.11.2005 | |||
| US 6618486 B2, 09.09.2003 | |||
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |

