Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных физических величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления объектами, склонными к колебаниям.
Высокоточное управление объектами актуально во многих отраслях промышленности, техники, технологии и науки. Эти задачи решаются с помощью систем с обратной связью, в которых осуществляются соответствующие изменения входных управляющих сигналов, поступающих на объект для обеспечения требуемого значения выходных величин объекта управления. Зависимость выходной величины объекта от входного сигнала определяется его математической моделью. Часто используются модели в виде амплитудно-частотных и фазочастотных характеристик, то есть зависимости амплитуды и фазы выходного сигнала от частоты входного сигнала. Встречаются объекты, склонные к колебаниям выходной величины.
Для решения задачи управления такими объектами могут применяться системы с обратной связью, содержащие традиционные регуляторы с пропорциональным, интегрирующим и дифференцирующим трактами (ПИД-регуляторы). Коэффициенты этих трактов рассчитываются разными методами.
Известна система с обратной связью, содержащая последовательно включенные в замкнутый контур регулятор, объект управления и вычитающее устройство, включенное через его отрицательный вход, в котором положительный вход является входом системы, а выход объекта является выходом системы [А.С. Востриков, Г.А. Французова, Е.Б. Гаврилов. Основы теории непрерывных и дискретных систем регулирования. 5-е изд., перераб. И доп.: учебное пособие. Новосибирск: Изд-во НГТУ, 2008 г., стр. 122, рис. 4.31].
Эта система с обратной связью работает следующим образом.
Целью работы системы является обеспечение наиболее близкого совпадения значения выходной величины с входным сигналом. Выходной сигнал Y с выхода объекта поступает на отрицательный вход вычитающего устройства, на положительный вход которого поступает входной сигнал системы V. Вычисляемая разница этих сигналов, называемая ошибкой Е, поступает на регулятор, который преобразует этот сигнал в управление U. Как правило, преобразование состоит в умножении на большой коэффициент. Также для обеспечения устойчивости в сигнал управления регулятор добавляет компоненту, пропорциональную производной ошибки, а для обеспечения высокой точности статического режима добавляется компонента, пропорциональная интегралу ошибки. Таким образом, общий вид выходного сигнала ПИД-регулятора задается уравнением

Здесь KP, KI, KD - коэффициенты усиления пропорционального, дифференцирующего и интегрирующего каналов регулятора. Проектирование регулятора состоит в этом случае в вычислении таких значений этих коэффициентов, которые обеспечат требуемое быстродействие, точность и устойчивость системы. Например, они могут быть рассчитаны методом численной оптимизации [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр. 24-29. URL: 13-1-4.pdf].
Недостаток такой системы с обратной связью состоит в большой динамической ошибке. Это проявляется в том, что если объект склонен к колебаниям, тогда переходный процесс на ступенчатое изменение входного сигнала V первоначально недостаточно быстро достигает требуемого значения выходной величины Y, а после достижения этой величины совершает множество колебаний около этой величины.
Таким образом, хотя установившееся значение переходного процесса соответствует требованиям, предъявляемым к системе с обратной связью, динамическая (начальная) часть переходного процесса неудовлетворительна.
Известна другая система с обратной связью, принятая за прототип, содержащая последовательно включенные в замкнутый контур первый регулятор, коммутатор, объект, вычитающее устройство, включенное через его отрицательный вход, также система содержит второй регулятор и компенсирующее звено, последовательно, включенные между выходом вычитающего устройства и вторым входом коммутатора, и анализатор входного сигнала, включенный между положительным входом вычитающего устройства и управляющим входом коммутатора, при этом положительный вход вычитающего устройства является входом системы, а выход объекта управления является выходом системы [В.А. Жмудь, О.Д. Ядрышников. Повышение качества переходного процесса при управлении склонными к колебаниям объектами. Автоматика и программная инженерия. 2013. №3 (5). С. 12-17. рис. 4, URL: http://jurnal.nips.ru/sites/default/files/АИПИ-3-2013-2.pdf].
Эта система с обратной связью работает следующим образом.
Первый регулятор настраивается методом численной оптимизации, как в работе [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр. 24-29. URL: http://jurnal.nips.ru/sites/default/files/АИПИ-3-2013-4.pdf], для обеспечения высокой статической точности; при этом контур со вторым регулятором размыкается. Также второй регулятор совместно с компенсирующим звеном настраивается так, чтобы обеспечить высокую динамическую точность тем же методом численной оптимизации, при этом контур с первым регулятором размыкается. Коммутирующее устройство за счет действия анализатора входного сигнала, управляющего его работой, обеспечивает первоначальное подключение на вход объекта выхода компенсатора, а по окончании переходного процесса подключает вместо этого выхода выход регулятора. Поэтому в начале переходного процесса в системе действует регулятор с компенсирующим звеном, а по окончании переходного процесса действует дополнительный регулятор, что обеспечивает вначале качественный переходный процесс, а в конце робастность, устойчивость и малую статическую ошибку.
Недостатком этой системы с обратной связью является большая динамическая ошибка.
Причиной этого является тот факт, что коммутатор подключает на вход объекта выход компенсатора только в начале переходного процесса после поступления на вход системы с обратной связью ступенчатого скачка управляющего сигнала V. Вместе с тем, система с обратной связью, как правило, должна работать длительно и непрерывно, при этом ступенчатые изменения управляющего сигнала V не являются единственными воздействиями на систему. Наряду с этими воздействиями на объект воздействуют всевозможные помехи и факторы, не поддающиеся учету, и сама система с обратной связью имеет своей назначением, прежде всего подавление влияния именно таких воздействий. Эти воздействия невозможно измерять, поэтому невозможно выявить их скачкообразные изменения. При этих скачках на вход анализатора входного сигнала поступают не изменяющиеся сигналы, поэтому этот анализатор входного сигнала не осуществляет переключений коммутатора, и поэтому в системе с обратной связью не действует дополнительный регулятор, исключая моменты, когда именно входной сигнал в системе с обратной связью получает ступенчатые приращения. Поскольку первый регулятор применяется для снижения динамической ошибки, то в ходе функционирования системы при изменениях всевозможных возмущающих воздействий, действующих на объект, динамическая ошибка велика. Поэтому в рассмотренной системе с обратной связью динамическая ошибка снижается не всегда, то есть недостаточно эффективно.
Предлагаемое изобретение решает задачу (обеспечивает технический эффект) снижения динамической ошибки.
Поставленная задача решается тем, что в систему с обратной связью, содержащую последовательно включенные в замкнутый контур первый регулятор, коммутатор, объект, вычитающее устройство, включенное через его отрицательный вход, также система содержит второй регулятор, включенный на выходе вычитающего устройства, при этом положительный вход вычитающего устройства является входом системы, а выход объекта управления является выходом системы, введен анализатор сигнала ошибки, включенный между выходом вычитающего устройства и управляющим входом коммутирующего устройства, а выход второго регулятора подключен ко второму входу коммутирующего устройства.
Также поставленная задача может быть решена тем, что в указанной выше системе с обратной связью анализатор сигнала ошибки выполнен в виде последовательно включенных дифференцирующего устройства, умножителя и нелинейного элемента, причем второй вход умножителя соединен с входом дифференцирующего устройства и является входом анализатора ошибки, а выходом этого анализатора ошибки является выход нелинейного элемента.
Предлагаемая система с обратной связью приведена на Фиг. 1, на Фиг. 2 приведена предлагаемая структура анализатора ошибки, на Фиг. 3 показаны графики переходных процессов в предлагаемой системе и в прототипе.
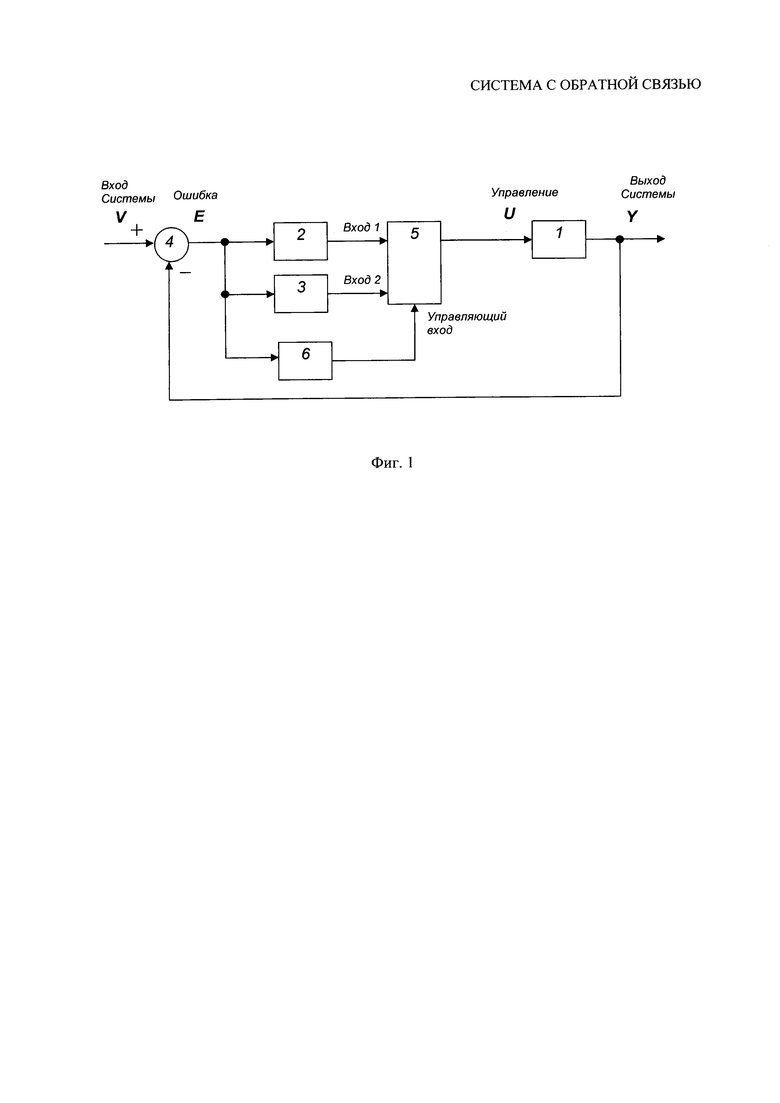
Система с обратной связью (Фиг. 1) содержит:
1 - объект управления,
2 - первый регулятор,
3 - второй регулятор,
4 - вычитающее устройство,
5 - коммутирующее устройство,
6 - анализатор сигнала ошибки.
При этом положительный вход вычитающего устройства 4 является входом системы с обратной связью, выход объекта управления 1 является выходом этой системы с обратной связью. Объект управления 1, вычитающее устройство 4 по отрицательному входу, первый регулятор 2 и коммутатор 5 включены последовательно в замкнутый контур. Второй регулятор 3 включен между выходом вычитающего устройства 4 и вторым входом коммутатора 5, анализатор сигнала ошибки включен между выходом вычитающего устройства и управляющим входом коммутатора.
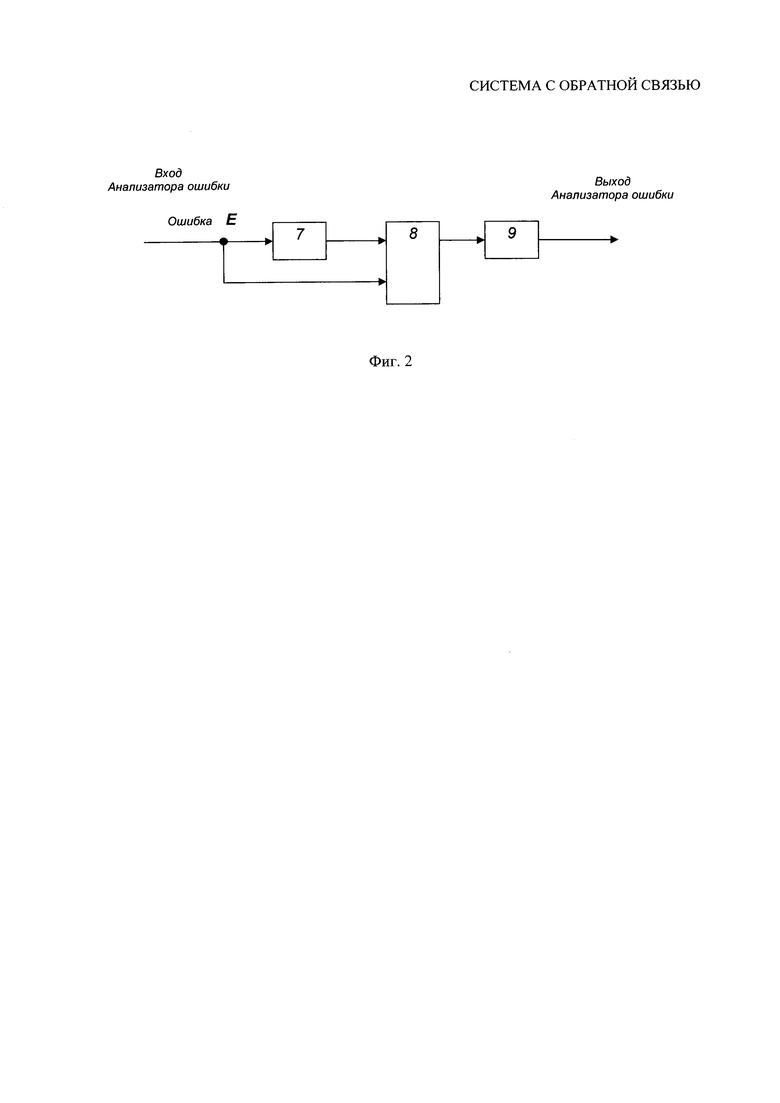
Анализатор сигнала ошибки 6 может быть выполнен, как показано на Фиг. 2.
На Фиг. 2 показан анализатор сигнала ошибки, который содержит:
7 - дифференцирующее устройство,
8 - умножитель,
9 - нелинейный преобразователь.
Объект 1 может быть таким же, как в прототипе, а именно объектом может служить любое устройство, имеющее вход и выход, при этом выходной сигнал зависит от входного сигнала так, что изменениями входного сигнала можно вызвать требуемое изменение выходного сигнала хотя бы даже с некоторым запаздыванием.
Все остальные элементы системы с обратной связью могут быть реализованы на аналоговой или цифровой электронной технике. Например, эти устройства могут быть выполнены на основе операционных усилителей с требуемыми обратными связями. Также эти элементы могут быть выполнены на сигнальных процессорах, то есть на микропроцессорах, имеющих на входе АЦП, а на выходе ЦАП, при этом зависимость выходных сигналов от входных в этих элементах задается программно.
Предлагаемая система с обратной связью работает следующим образом. В исходном состоянии коммутатор 5 подключает на свой выход, а значит и на вход объекта 1 один из своих входов, то есть выход одного из регуляторов 2 или 3. Таким образом, контур управления системы получается замкнутым с использованием одного из двух регуляторов, например первый регулятор 2. Этот контур работает как в любой системе с обратной связью, а именно выходной сигнал объекта 1 вычитается на вычитающем устройстве 4 из входного сигнала системы, получаемая на выходе вычитающего устройства 4 разница является сигналом ошибки. Этот сигнал ошибки преобразуется первым регулятором 2, в управляющий сигнал, который поступает через коммутатор 5 на вход объекта 1 и воздействует на объект 1 так, чтобы изменить его выходной сигнал в нужную сторону. Вследствие действия обратной связи выходной сигнал объекта 1 становится равным предписанному значению, поступающему на вход системы. При этом анализатор сигнала ошибки 6 анализирует сигнал ошибки с выхода вычитающего устройства 4 и на его основе формирует логический сигнал, который управляет работой коммутирующего устройства. В зависимости от этого сигнала на выход этого коммутирующего устройства 6 поступает сигнал с его первого входа. Анализатор ошибки 6 в зависимости от того, уменьшается ли она по величине, или не уменьшается, подключает первый регулятор 2 или второй регулятор 3. Оба этих регулятора заранее настраиваются методом численной оптимизации в составе схемы, реализующей такое переключение. Экспериментально моделированием на нескольких примерах выявлено, что такой способ позволяет уменьшить динамическую ошибку системы. Теоретическое обоснование этого можно дать на основе следующих соображений. Изменения сигнала на выходе системы, когда ошибка уменьшается по величине, можно охарактеризовать как «правильные» изменения. Изменения выходных сигналов, когда ошибка возрастает по величине, можно охарактеризовать как «неправильные» изменения. Поскольку «правильные» и «неправильные» изменения могут чередоваться, можно это трактовать, как чередование «правильной» и «неправильной» работы регулятора. Поэтому может быть поставлен вопрос о корректировке «неправильной» работы регулятора путем изменения его коэффициентов. Для проверки продуктивности этой идеи достаточно осуществить моделирование такой системы, при этом первый регулятор 2 и второй регулятор 3 могут, например, иметь одинаковые математические модели, но различные коэффициенты усиления, которые определяются методом численной оптимизации. Если бы указанный метод не был эффективен, то процедура численной оптимизации давала бы одинаковые коэффициенты для первого и второго регуляторов 2 и 3, поскольку переключение регуляторов не приводило бы к снижению величины целевой функции. Моделирование показало, что всегда процедура дает разные коэффициенты для первого и второго регуляторов 2 и 3. Это подтверждает эффективность метода для исследованных видов регуляторов.
Анализатор ошибки может быть выполнен, например, как показано на Фиг. 2, в виде последовательно включенных дифференцирующего устройства 7, умножителя 8 и нелинейного преобразователя, причем второй вход умножителя 8 при этом соединен с входом дифференцирующего устройства 7 и является входом этого анализатора ошибки.
Этот анализатор ошибки работает следующим образом. Ошибка поступает на умножитель 8 через дифференцирующее устройство 7 и непосредственно на его второй вход. Поэтому на выходе умножителя формируется сигнал, равный произведению ошибки на ее производную. Если ошибка возрастает по величине, то это произведение положительно, а если она убывает по величине, то это произведение отрицательно. Нелинейный элемент преобразует этот сигнал в дискретный сигнал с двумя выходными значениями. Этот сигнал выдается на выход анализатора ошибки, чтобы управлять переключениями коммутирующего устройства.
Таким образом, данная система обеспечивает снижение динамической ошибки. Тем самым поставленная задача решена.
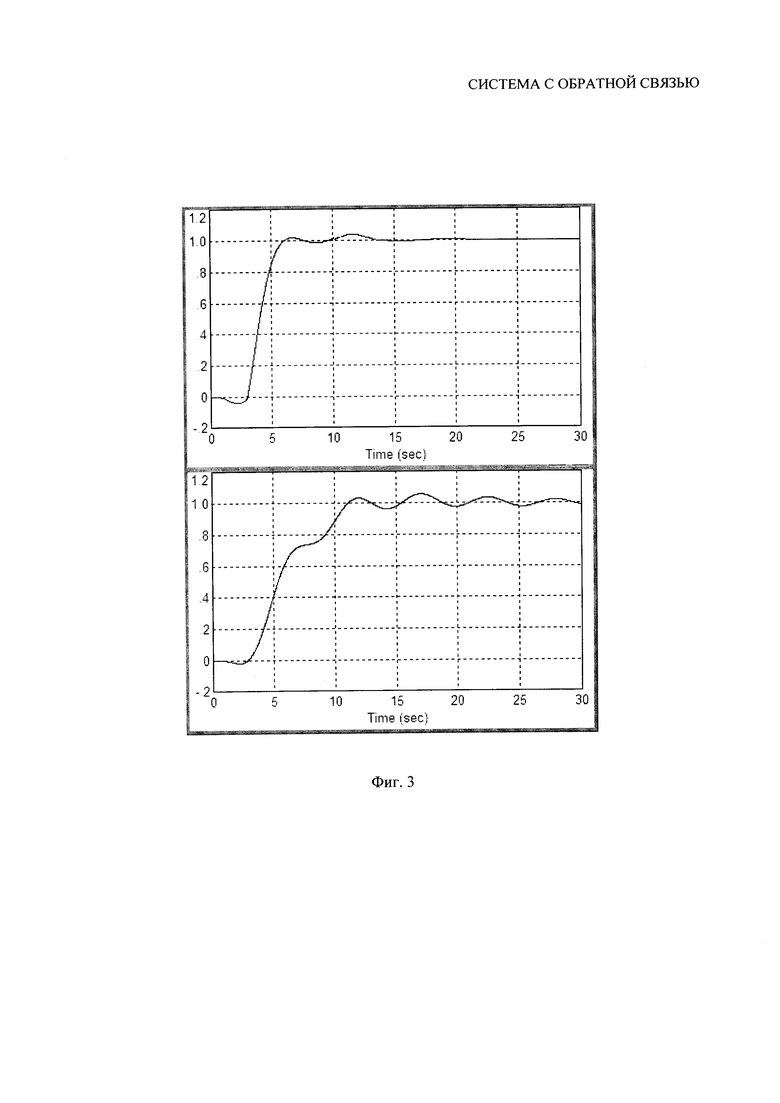
Для иллюстрации технического эффекта предлагаемой системы с обратной связью (решения поставленной задачи) на Фиг. 3 приведен результат моделирования такой системы: верхний график, а также в случае работы системы по прототипу: нижний график.
При этом математическая модель объекта 1 задана в виде передаточной функции следующего вида:

Здесь s - аргумент преобразования Лапласа, аналогичный оператору дифференцирования при описании объекта в форме дифференциальных уравнений. Расчет коэффициентов выполнен моделированием в программе VisSim. Стоимостная функция для оптимизации представляет собой интеграл от произведения модуля ошибки на время с момента начала переходного процесса. В случае применения простого ПИД-регулятора расчет дал следующие коэффициенты регулятора: КП=-0,122; КИ=0,164; КД=0,55 - соответственно коэффициенты пропорционального, интегрирующего и дифференцирующего трактов. В случае применения системы по Фиг. 3 получены коэффициенты для первого регулятора: КП=-0,517; КД=-0,538; коэффициенты для второго регулятора: КП=0,282; КД=0,814; коэффициенты для третьего регулятора КИ=0,24.
По графикам на Фиг. 3 видно, что динамическая ошибка на верхнем графике меньше, чем на нижнем графике. Действительно, на верхнем графике выходная величина быстрее достигает предписанного значения, равного единице, колебания около равновесного состояния меньше по величине и быстрее прекращаются.
Таким образом, предлагаемое изобретение решает задачу снижения динамической ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2540461C1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2541684C1 |
| Система с обратной связью | 2021 |
|
RU2756229C1 |
| СИСТЕМА УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2566339C2 |
| СТРУКТУРА МОДЕЛИ ДЛЯ ОПТИМИЗАЦИИ СИСТЕМЫ С ОБРАТНОЙ СВЯЗЬЮ | 2014 |
|
RU2554291C1 |
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Устройство для контроля исправности объекта | 1981 |
|
SU987581A1 |
Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных физических величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления объектами, склонными к колебаниям. Система с обратной связью содержит последовательно включенные в замкнутый контур первый регулятор, коммутатор, объект, вычитающее устройство, включенное через его отрицательный вход, также содержащая второй регулятор, включенный на выходе вычитающего устройства. При этом положительный вход вычитающего устройства является входом системы, а выход объекта управления является выходом системы. Кроме того, введен анализатор сигнала ошибки, включенный между выходом вычитающего устройства и управляющим входом коммутирующего устройства, а выход второго регулятора подключен ко второму входу коммутирующего устройства. Технический результат заключается в снижении динамической ошибки. 1 з.п. ф-лы, 3 ил.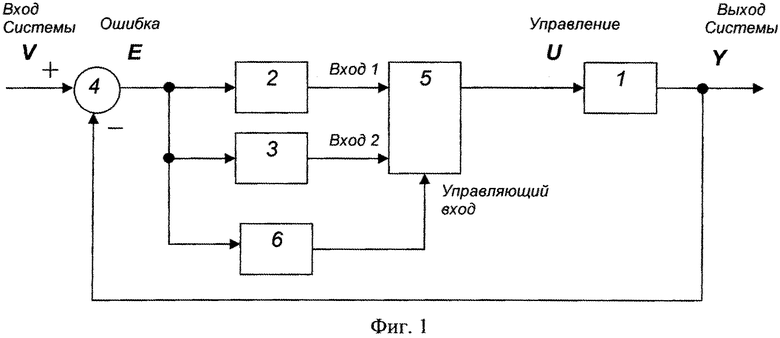
1. Система с обратной связью, содержащая последовательно включенные в замкнутый контур первый регулятор, коммутатор, объект, вычитающее устройство, включенное через его отрицательный вход, также содержащая второй регулятор, включенный на выходе вычитающего устройства, при этом положительный вход вычитающего устройства является входом системы, а выход объекта управления является выходом системы, отличающаяся тем, что в нее введен анализатор сигнала ошибки, включенный между выходом вычитающего устройства и управляющим входом коммутирующего устройства, а выход второго регулятора подключен ко второму входу коммутирующего устройства.
2. Система с обратной связью по п. 1, отличающаяся тем, что анализатор сигнала ошибки выполнен в виде последовательно включенных дифференцирующего устройства, умножителя и нелинейного элемента, причем второй вход умножителя соединен с входом дифференцирующего устройства и является входом анализатора ошибки, а выходом этого анализатора ошибки является выход нелинейного элемента.
| Власов К.П | |||
| Теория автоматического управления, Учебное пособие | |||
| Харьков: Издательство Гуманитарный центр, 2007, стр | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
| US 6961626 B1, 01.11.2005 | |||
| US 6618486 B2, 09.09.2003 | |||
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |

