Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных физических величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления объектами управления, склонными к колебаниям.
Высокоточное управление динамическими объектами управления актуально во многих отраслях промышленности, техники, технологии и науки. Эти задачи решаются с помощью систем автоматического регулирования с отрицательной обратной связью, в которых осуществляются соответствующие изменения входных управляющих сигналов, поступающих на объект управления для обеспечения требуемого значения его выходных величин. Встречаются объекты управления, склонные к колебаниям выходной величины.
Для решения задачи управления такими объектами управления могут применяться традиционные пропорционально-интегрально-дифференцирующие регуляторы (ПИД-регуляторы), формирующие сигнал в виде суммы пропорциональной (П), интегральной (И) и дифференциальной (Д) компонент. Коэффициенты этих компонент рассчитываются разными методами, например, методами численной оптимизации [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр.24-29. URL: 13-1-4.pdf].
Известна система с обратной связью, содержащая: последовательно включенные в замкнутый контур регулятор, объект управления и вычитающее устройство, включенное через его отрицательный вход, в котором положительный вход является входом системы с обратной связью, а выход объекта управления является выходом системы [А.С. Востриков, Г.А. Французова, Е.Б. Гаврилов. Основы теории непрерывных и дискретных систем регулирования. 5-е изд., перераб. и доп.: учебное пособие. Новосибирск: Изд-во НГТУ, 2008 г., стр.122, рис.4.31].
Эта система с обратной связью работает следующим образом.
Целью работы системы с обратной связью является обеспечение наиболее близкого совпадения значения выходной величины с входным сигналом. Выходной сигнал Y с выхода объекта управления поступает на отрицательный вход вычитающего устройства, на положительный вход которого поступает входной сигнал системы с обратной связью V. Вычисляемая разница этих сигналов, называемая ошибкой E, поступает на регулятор, который преобразует этот сигнал в управление U. Как правило, преобразование состоит в умножении на большой коэффициент. Также для обеспечения устойчивости в сигнал управления регулятор добавляет компоненту, пропорциональную производной ошибки, а для обеспечения высокой точности статического режима добавляется компонента, пропорциональная интегралу ошибки. Таким образом, общий вид выходного сигнала ПИД-регулятора задается уравнением:

Здесь KP, KI, KD - коэффициенты усиления пропорционального, дифференцирующего и интегрирующего каналов регулятора. Проектирование регулятора состоит в этом случае в вычислении таких значений этих коэффициентов, которые обеспечат требуемое быстродействие, точность и устойчивость системы с обратной связью. Например, они могут быть рассчитаны методом численной оптимизации [Жмудь В.А., Ядрышников О.Д. Численная оптимизация ПИД-регуляторов с использованием детектора правильности движения в целевой функции. Автоматика и программная инженерия. 2013. №1 (3). Стр.24-29. URL: 3-1-4.pdf].
Недостаток такой системы с обратной связью состоит в большой динамической ошибке при управлении объектами управления, склонными к колебаниям, которая достигает 200%. Это проявляется в том, что переходный процесс на ступенчатое изменение входного сигнала V первоначально может быть направлен даже в сторону, противоположную требуемому направлению изменения выходной величины Y, достигая при этом значения - 100% от предписанного значения, вместо +100%.
Известна другая система с обратной связью, содержащая желаемую модель прямого контура, анализатор внутренних условий, вычислитель и последовательно включенные объект управления, вычитающее устройство по отрицательному входу и регулятор, причем положительный вход вычитающего устройства является входом системы с обратной связью, выход объекта управления является выходом системы с обратной связью, отрицательный вход вычитающего устройства соединен с его выходом через последовательно включенные регулятор и объект управления, входы анализатора внутренних условий соединены с выходами вычитающего устройства и объекта управления, входы вычислителя соединены с выходами анализатора внутренних условий и желаемой моделью внутреннего контура, а выход вычислителя соединен с управляющим входом регулятора. Эта система с обратной связью принята за прототип [Власов К.П. Теория автоматического управления: учебное пособие. Харьков: Гуманитарный центр. 2007. Стр.443]. Здесь под термином «желаемая модель прямого контура» понимается принятый в теории автоматического управления термин, подразумевающий такую математическую модель этого контура, которая отвечает предъявляемым требованиям к системе с обратной связью [Власов К.П. Теория автоматического управления: учебное пособие. Харьков: Гуманитарный центр. 2007. Стр.442].
Эта система с обратной связью работает следующим образом.
Основной контур управления, содержащий объект управления, регулятор и вычитающее устройство, работает так же, как в описанном выше устройстве. Анализатор внутренних условий анализирует сигнал ошибки системы с обратной связью E и выходной сигнал Y. По результатам анализа это устройство может оценивать изменения математической модели последовательно включенных регулятора и объекта управления, если они имеют место. Вычислитель анализирует сведения об этой модели и сравнивает их с желаемой моделью прямого контура. На основании результата сравнения этот вычислитель вычисляет корректирующие воздействия на регулятор. Эти воздействия изменяют модель регулятора так, чтобы изменившаяся в итоге модель последовательного включения регулятора и объекта управления в большей степени соответствовала желаемой модели прямого контура. Таким образом, за счет действия контура адаптации, образованного желаемой моделью прямого контура, анализатором внутренних условий и вычислителем, регулятор перестраивается так, чтобы свойства основного контура управления, образуемого вычитающим устройством, регулятором и объектом управления, в большей степени соответствовали предъявляемым к нему требованиям. Это обеспечивает лучшее действие системы с обратной связью, то есть обеспечивает ее устойчивость и необходимую статическую точность.
Недостатком этой системы с обратной связью является недостаточная динамическая точность при управлении объектами управления, склонными к колебаниям.
Причиной этого является невозможность быстрой компенсации изменяющихся свойств входного сигнала объекта управления. Действительно, адаптивный контур регулирования, образованный желаемой моделью прямого контура, анализатором внутренних условий и вычислителем, не может иметь достаточного быстродействия в связи с зашумленностью сигналов и статистическими методами оценивания. В связи с этим вычислитель должен выполнять сложные вычисления на основе достаточного и статистически достоверного материала. Таким образом, действия вычислителя требуют много времени, и весь адаптивный контур не может иметь быстродействия большего, чем быстродействие основного контура управления, образованного вычитающим устройством, регулятором и объектом управления. Поэтому при управлении объектами управления, склонными к колебаниям, такая система с обратной связью может обеспечить требуемую статическую точность, но не может обеспечить достаточную динамическую точность, поскольку на протяжении переходного процесса такая система с обратной связью не успевает изменить модель регулятора.
Таким образом, рассмотренная система с обратной связью излишне не обеспечивает достаточной динамической точности при управлении объектом управления, склонным к колебаниям.
Предлагаемое изобретение решает задачу повышения динамической точности при управлении объектами управления, склонными к колебаниям.
Поставленная задача решается тем, что система с обратной связью содержит последовательно включенные объект управления, вычитающее устройство по отрицательному входу и регулятор, причем положительный вход вычитающего устройства является входом системы с обратной связью, выход объекта управления является выходом системы с обратной связью, при этом в нее введены переключатель знака сигнала и анализатор ошибки, причем переключатель знака сигнала включен между выходом регулятора и входом объекта управления, а анализатор ошибки включен между выходом вычитающего устройства и управляющим входом переключателя знака сигнала.
Предлагаемая система с обратной связью показана на Фиг.1.
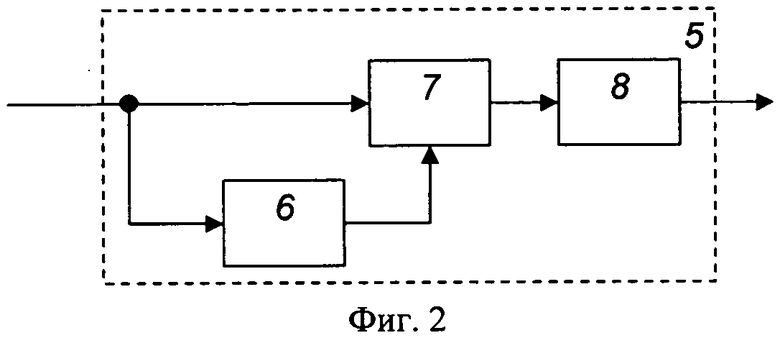
Анализатор ошибки 5 может быть выполнен, как показано на Фиг.2.
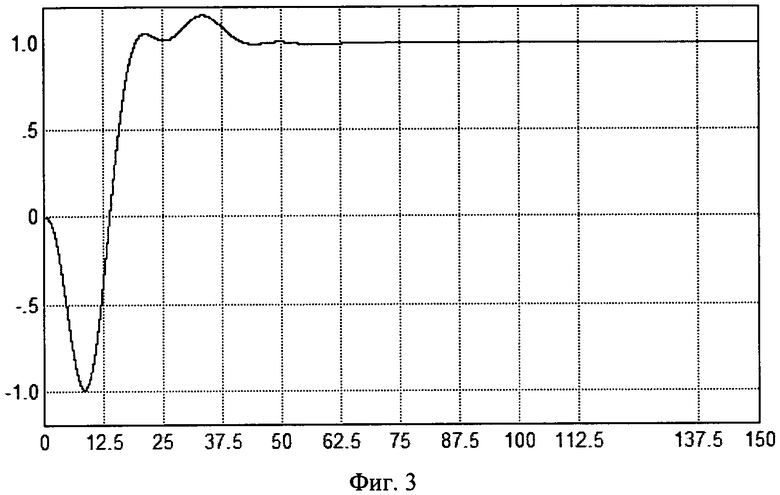
На Фиг.3 показан переходный процесс в системе с обратной связью, с объектом управления, склонным к колебаниям, при отключении анализатора ошибки, при условии, что регулятор рассчитан наилучшим образом методом численной оптимизации.
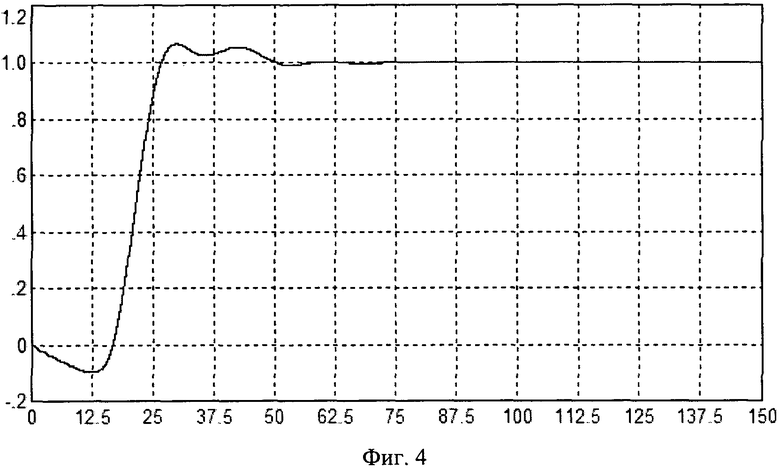
На Фиг.4 показан переходный процесс в системе с обратной связью, с объектом управления, склонным к колебаниям, при подключении анализатора ошибки, при условии, что регулятор рассчитан наилучшим образом методом численной оптимизации.
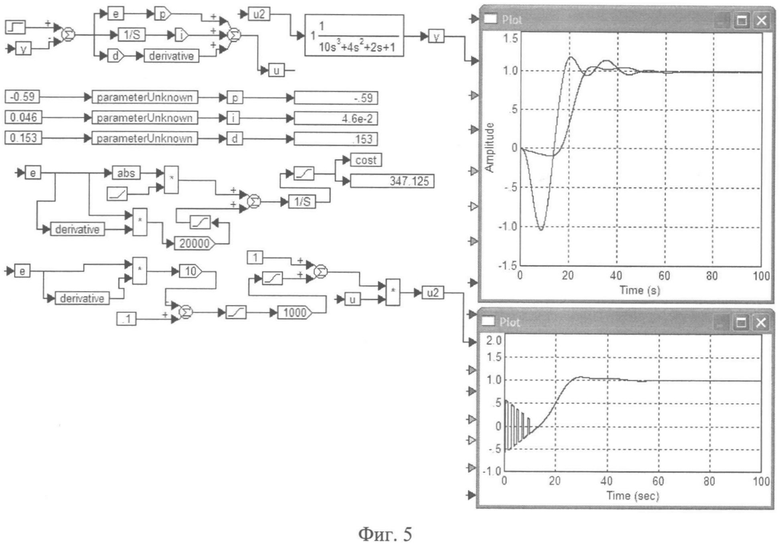
На Фиг.5 показана схема моделирования примера такой системы с обратной связью в программе VisSim с получением графиков, которые показаны на Фиг.3 и 4.
Предлагаемая система с обратной связью (Фиг.1) содержит:
1 - объект управления,
2 - регулятор,
3 - вычитающее устройство,
4 - переключатель знака сигнала,
5 - анализатор ошибки.
При этом вычитающее устройство 3, регулятор 2, переключатель знака сигнала 4 и объект управления 1 включены последовательно, положительный вход вычитающего устройства 3 является входом системы с обратной связью, выход объекта управления 1 является выходом этой системы с обратной связью и соединен с отрицательным входом вычитающего устройства 3, анализатор ошибки 5 включен между выходом вычитающего устройства 3 и управляющим входом переключателя знака сигнала 4.
Анализатор ошибки (Фиг.2) содержит:
6 - дифференцирующее звено,
7 - умножитель сигналов,
8 - пороговое устройство.
Дифференцирующее звено 6 включено между первым и вторым входами умножителя сигналов 7, вход этого дифференцирующего звена 6 является входом анализатора ошибки 5, выход умножителя сигналов 7 соединен с входом порогового устройства 8, выход которого является выходом анализатора ошибки 5.
Все элементы системы с обратной связью, кроме объекта управления 1, могут быть выполнены на основе аналоговой или цифровой электронной техники. Объектом управления может быть любое техническое устройство, имеющее вход и выход, например, объект управления, склонный к колебаниям.
Предлагаемая система с обратной связью работает следующим образом.
В исходном состоянии переключатель знака сигнала 4 не изменяет знака предаваемого через него сигнала, но по сигналу, подаваемому на его управляющий вход, может его изменить на противоположный. Поэтому в исходном и в установившемся режиме и при медленных изменениях входного сигнала V данная система с обратной связью работает так же, как первая описанная система с обратной связью. А именно: обратная связь, образуемая вычитающим устройством 3 и регулятором 2, действуя через переключатель знака сигнала 4 на объект управления 1, заставляет его выходной Y сигнал быть равным предписанному сигналу V, подаваемому на положительный вход вычитающего устройства 3.
При резком изменении входного сигнала V в системе с обратной связью на выходе вычитающего устройства 3 возникает ошибка E. Если система с обратной связью работает с достаточным запасом устойчивости, то стабилизирующая обратная связь, реализуемая через регулятор 2, уменьшает возникающую ошибку. Поэтому знак сигнала ошибки E противоположен знаку производной этой ошибки, то есть если ошибка положительна, то она уменьшается, а если ошибка отрицательна, то она возрастает. В этом случае ошибка постепенно убывает до нулевого значения. Анализатор ошибки 5 в этом случае не формирует сигнала, заставляющего переключатель знака сигнала 4 переключать знак сигнала управления U. Если же ошибка совпадает по знаку со своей производной, это указывает на неустойчивую работу основного контура управления, образованного объектом управления 1, регулятором 2 и вычитающим устройством 3. Анализатор ошибки 5 вследствие своей структуры в этой ситуации формирует сигнал, который воздействует на переключатель знака сигнала 4. Этот переключатель знака сигнала 4 изменяет знак своего выходного сигнала на противоположный. Поэтому сигнал управления U изменяется на противоположный, вследствие чего направление изменяет действие сигнала обратной связи на противоположное. В результате этого направление изменения ошибки E также изменяется на противоположное, то есть если ошибка возрастала, она начинает убывать, а если она убывала, она начинает возрастать. Таким образом, в случае, если изменения ошибки идут не в нужном направлении, в системе с обратной связью переключается знак управляющего сигнала и это изменение ошибки движется в нужном направлении. При этом ошибка и ее производная приобретают разные знаки, то есть условия срабатывания переключателя знака сигнала изменяются, и знак управляющего сигнала возвращается к исходному значению. Таким образом, возникает так называемый скользящий режим до тех пор, пока действие регулятора не станет устойчивым. Поскольку регулятор 2 рассчитывается методом численной оптимизации, при малых ошибках и при медленных изменениях входного сигнала система с обратной связью устойчива, режим переключения знака требуется лишь на время больших и резких изменений входного сигнала. Таким образом, корректирующий контур, образованный анализатором ошибки 5 и переключателем знака сигнала 4, улучшает динамическую точность системы с обратной связью, не ухудшая ее статическую точность.
Анализатор ошибки 5 работает следующим образом. На умножителе сигналов 7 формируется сигнал, равный произведению ошибки на ее производную, которую формирует дифференцирующее звено 6. Если этот сигнал отрицательный или меньше некоторой наперед заданной малой положительной величины, то на выходе порогового устройства, сравнивающего этот сигнал с этой малой положительной величиной, будет сформирован, например, нулевой логический сигнал. Такой сигнал не изменит знака управляющего сигнала. Если же сигнал, пропорциональный произведению ошибки на ее производную, формируемый на выходе умножителя сигналов 7, превысит указанную малую положительную величину, то на выходе порогового устройства 8 будет сформирован, например, сигнал логической единицы, который заставит переключатель знака сигнала изменить знак управляющего сигнала U.
Таким образом, будет скорректирован переходный процесс. Поэтому данная система с обратной связью обеспечивает достижение высокой динамической точности при управлении объектами управления, склонными к колебаниям.
Структура всех используемых элементов эффективно действует, что подтверждено моделированием.
Для демонстрации эффективности предлагаемой системы с обратной связью осуществлено моделирование такой системы с обратной связью. На Фиг.3 и 4 приведен результат моделирования переходного процесса в системе с обратной связью с объектом управления, склонным к колебаниям, и регулятором с наилучшей настройкой. В первом случае, показанном на Фиг.3, для наглядности анализатор ошибки 5 отключен, переключатель знака сигнала 4 не изменяет знак сигнала, передавая сигнал со своего входа на свой выход без изменения. Во втором случае, показанном на Фиг.4, все элементы подключены и действуют так, как описано выше.
Для моделирования использована модель объекта управления, в виде передаточной функции следующего вида:

Здесь s - аргумент преобразования Лапласа, аналогичный оператору дифференцирования при описании объекта управления в форме дифференциальных уравнений. Коэффициенты регулятора, рассчитанные методом численной оптимизации, равны:
KP=-0,5902, KI=0,042886, KD=0,15374.
По оси X на графике отображено время в секундах, по оси Y - условные единицы выходного сигнала. Идеальный переходный процесс должен, начинаясь от нуля, монотонно двигаться вверх в направлении значения единицы и остаться на этом значении с минимальным отклонением. Может иметь место небольшое нарушение монотонности, например, перерегулирование.
Приведенный на Фиг.3 отклик системы с обратной связью на единичный ступенчатый скачок входного сигнала V демонстрирует плохую динамическую точность. Переходный процесс, показанный на выходе системы с обратной связью, далек от идеального, поскольку он первоначально движется в противоположную сторону, к значению минус единицы, то есть динамическая ошибка достигает 200%. После этого процесс движется в нужном направлении и, совершив несколько колебаний около предписанного значения, завершается там, где следует. Таким образом, хотя установившееся значение переходного процесса соответствует требованиям, предъявляемым к системе с обратной связью, динамическая (начальная) часть переходного процесса крайне неудовлетворительна.
Для сравнения на Фиг.4 показан результат моделирования системы с обратной связью по предлагаемой структуре для объекта управления, рассмотренного выше. Из Фиг.4 видно, что обратное движение в начале переходного процесса сокращено до значения около 10% от величины скачка входного сигнала, тогда как в первой описанной системе с обратной связью величина этого скачка составляет 100%. То есть в предлагаемой системе с обратной связью динамическая ошибка в своем наибольшем значении не превышает 110%, что является заметным уменьшением по сравнению с 200%.
Схема моделирования системы с обратной связью в программе VisSim показана на Фиг.5.
Тем самым на примере подтверждено, что поставленная задача повышения динамической точности при управлении объектами управления, склонными к колебаниям, решена.
Полученное повышение динамической точности достигнуто за счет введения переключателя знака сигнала 4 и анализатора ошибки 5 с соответствующими соединениями.
Таким образом, предлагаемая система с обратной связью решает задачу повышения динамической точности при управлении объектами управления, склонными к колебаниям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2015 |
|
RU2584925C1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2540461C1 |
| Система с обратной связью | 2021 |
|
RU2756229C1 |
| СИСТЕМА УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2566339C2 |
| СТРУКТУРА МОДЕЛИ ДЛЯ ОПТИМИЗАЦИИ СИСТЕМЫ С ОБРАТНОЙ СВЯЗЬЮ | 2014 |
|
RU2554291C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2012 |
|
RU2522899C1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СТЕНДА ПРОЧНОСТНЫХ ИСПЫТАНИЙ | 2021 |
|
RU2772243C1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2011 |
|
RU2457529C1 |
Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных физических величин (температуры, давления, производительности, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления объектами управления, склонными к колебаниям. Система с обратной связью содержит последовательно включенные объект управления, вычитающее устройство по отрицательному входу и регулятор, причем положительный вход вычитающего устройства является входом системы с обратной связью. Выход объекта управления является выходом системы с обратной связью. Также введены переключатель знака сигнала и анализатор ошибки. Причем переключатель знака сигнала включен между выходом регулятора и входом объекта управления, а анализатор ошибки включен между выходом вычитающего устройства и управляющим входом переключателя знака сигнала. Анализатор ошибки содержит последовательно включенные умножитель сигналов и пороговое устройство, а также дифференцирующее звено, включенное между первым и вторым входами умножителя сигналов. Технический результат заключается в повышении динамической точности при управлении объектами управления, склонными к колебаниям. 1 з.п. ф-лы, 5 ил.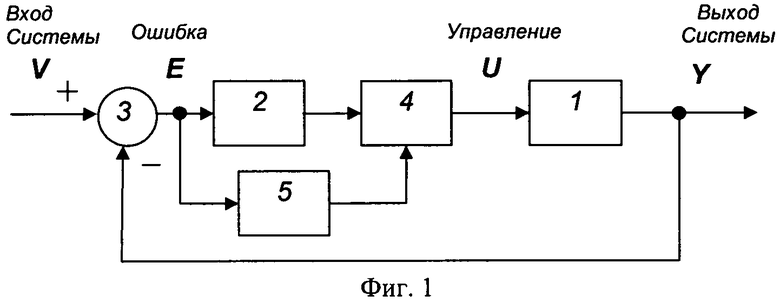
1. Система с обратной связью, содержащая последовательно включенные объект управления, вычитающее устройство по отрицательному входу и регулятор, причем положительный вход вычитающего устройства является входом системы с обратной связью, выход объекта управления является выходом системы с обратной связью, отличающаяся тем, что в нее введены переключатель знака сигнала и анализатор ошибки, причем переключатель знака сигнала включен между выходом регулятора и входом объекта управления, а анализатор ошибки включен между выходом вычитающего устройства и управляющим входом переключателя знака сигнала.
2. Система с обратной связью по п.1, отличающаяся тем, что анализатор ошибки содержит последовательно включенные умножитель сигналов и пороговое устройство, а также дифференцирующее звено, включенное между первым и вторым входами умножителя сигналов.
| Власов К.П | |||
| Теория автоматического управления, Учебное пособие | |||
| Харьков: Издательство Гуманитарный центр, 2007, стр | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
| US 6961626 B1, 01.11.2005 | |||
| US 6618486 B2, 09.09.2003 | |||
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |

