Настоящее изобретение касается способа и ткацкой машины для зевообразования с помощью устройства зевообразования, привод которого осуществляется собственным двигателем зевообразования.
Из уровня техники известно, что у ткацких машин для зевообразования предусматривается устройство зевообразования, у которого привод нескольких элементов зевообразования, каждый из которых направляет один свод нитей основы, осуществляется через промежуточную передачу от главного приводного двигателя ткацкой машины поочередно с подъемом и опусканием. Таким образом зев, который образуется сводами нитей основы разных элементов зевообразования, поочередно открывается и закрывается. В открытый зев вводится нить утка. После введения утка зев с помощью элементов зевообразования закрывается и снова открывается. Одновременно нить утка прибивается бердом к опушке изделия, и процесс начинается сначала. Посредством смены зева разных сводов нитей основы и введения разных нитей утка образуется ткацкий рисунок.
При закрытии и последующем открытии зева случается, что отдельные нити основы соседних сводов нитей основы цепляются друг за друга. Между этими нитями основы не образуется зев. При последующем введении утка из-за этих так называемых цепляющихся нитей основы происходят неисправности. При введении утка посредством механических элементов, например грейфера, сцепляющиеся нити основы разрушаются органом введения утка, ткацкая машина автоматически останавливается из-за обрыва основы. При введении утка посредством струи текучей среды, например сжатого воздуха, нить утка цепляется за сцепляющиеся нити основы. Это приводит к автоматическому останову ткацкой машины из-за обрыва утка. Обрыв утка и обрыв основы приводят к простоям ткацкой машины и к необходимости вмешательства персонала. Поэтому делаются усилия по предотвращению сцепления нитей основы.
Это удается сделать, например, путем того, что моменты времени, в которые закрывается зев, для разных соседних сводов нитей основы задаются различным образом. Тем самым достигается, что все поднимающиеся и опускающиеся нити основы не встречаются в закрытом зеве в один и тот же момент времени, а что эта встреча для сводов нитей основы, которые направляются различными элементами зевообразования, происходит в разные моменты времени в цикле движения ткацкой машины. В уровне техники существуют, однако, устройства зевообразования, у которых это невозможно, так как все элементы зевообразования по конструктивным причинам всегда одновремено проходят положение закрытия зева (зев закрыт).
Момент времени прохождения положения закрытия зева у большинства устройств зевообразования может изменяться путем того, что соединение между главным двигателем ткацкой машины и устройством зевообразования, привод которого осуществляется этим двигателем, разъединяется и после прокручивания одного из двух приводных валов снова соединяется. Благодаря этому в течение цикла движения ткацкой машины изменяется относительный момент времени закрытия зева для всех элементов зевообразования и вместе с тем для всех нитей основы в зеве.
Такого рода перестановка относительного момента времени закрытия зева для всех элементов зевообразования может предприниматься одновременно у устройств зевообразования, привод которых осуществляется собственным двигателем, без механических вмешательств, то есть также при работающей ткацкой машине. Такое изменение синхронности между главным двигателем ткацкой машины и двигателем зевообразования устройства зевообразования выполняется с помощью электронных сигналов управления устройства управления ткацкой машины.
Ткацкая машина, снабженная упомянутыми устройствами, которые позволяют изменять синхронность при работающей ткацкой машине, показана, например, в WO 2003071017 A. В этом документе излагается, что с помощью такой машины, в принципе, возможно, в соответствии с потребностями ткачества, гибко осуществлять согласование режима работы ткацкой машины и устройства зевообразования или, соответственно, зевообразуюшей машины, т.е. выбирать в широких границах синхронность двух приводных систем в отношении основного согласования (например, при каком угле положения машины происходит закрытие зева) и в отношении приемлемых допусков. В WO 2003071017 A раскрывается, кроме того, что привод ткацкой и зевообразующей машины цикл за циклом ткачества в некоторый заданный момент работают синхронно. Этот момент может быть разным для разных циклов ткачества.
При работе с такой ткацкой машиной неожиданным образом выяснилось, что путем определенных изменений синхронности при работающей ткацкой машине описанные во введении проблемы сцепляющихся нитей основы могут уменьшаться.
Задачей настоящего изобретения является предоставление способа и ткацкой машины, с помощью которых это удается.
Эта задача решается с помощью способа и ткацкой машины по независимым пунктам формулы изобретения.
Предлагаемый изобретением способ предусматривает зевообразование посредством устройства зевообразования, привод которого осуществляется двигателем зевообразования, и которое установлено на ткацкой машине, привод которой осуществляется главным двигателем. Образованный несколькими нитями основы или несколькими сводами нитей основы ткацкой машины зев при работающем устройстве зевообразования в каждом цикле движения ткацкой машины в зависимости от рисунка переплетения открывается и закрывается. Рисунок переплетения может быть при этом задан, например, в виде приводных средств, посредством перфокарты или же электронным способом с помощью сохраненных при управлении данных. При этом приводные средства могут быть, например, выполнены в виде промежуточной передачи, содержащей несколько различных эксцентриков, или в виде промежуточной передачи, содержащей несколько электромеханических элементов переключения, которые в каждом цикле движения настраиваются таким образом, чтобы подключенные к ним элементы зевообразования поднимали или опускали нити основы в соответствии с желаемым рисунком переплетения. При этом рисунок переплетения содержит информацию о том, какие нити основы или своды нитей основы во время цикла движения ткацкой машины располагаются устройством зевообразования в верхнем зеве или в нижнем зеве, то есть выше или ниже нити утка, предназначенной для введения.
Оба двигателя для привода ткацкой машины и устройства зевообразования синхронизируются друг с другом посредством электронного управления ткацкой машины таким образом, чтобы в момент времени введения утка ткацкой машины зев был открыт. Синхронность двух двигателей может, однако, изменяться при работающей машине с помощью сигналов управления устройства управления. Благодаря этому достигается, что во время разных циклов движения ткацкой машины относительные моменты времени закрытия зева, в которые зев закрывается в соответствующих циклах движения, отличны друг от друга.
Понятие относительного момента времени закрытия зева отражает здесь момент времени с начала цикла движения ткацкой машины. Так как один цикл движения обычно определяется одним полным оборотом главного вала ткацкой машины, можно также соотнести момент времени закрытия зева с этим совершающимся за 360° оборотом главного вала ткацкой машины. Тогда говорят об угле закрытия зева вместо относительного момента времени закрытия зева. Этот угол закрытия зева представляет собой величину, которая может вводиться в электронное управление ткацкой машины с пульта обслуживания ткацкой машины или загружаться с носителя данных с эталонными данными. Начало и конец цикла движения или, соответственно, оборота на 360° главного вала ткацкой машины обычно измеряется от прибоя берда. Между двумя прибоями берда, т.е. в течение одного цикла движения, всегда происходит одно введение утка.
Использование углов закрытия зева, которые относятся к обороту, равному 360° главного вала ткацкой машины и, таким образом, не зависят от частоты вращения, приводит к лучшей возможности контроля и поэтому здесь является предпочтительным.
Предлагаемый изобретением способ отличается тем, что углы закрытия зева в течение заданного отдельного количества циклов движения ткацкой машины образуют возрастающую или убывающую последовательность углов закрытия зева. Это происходит путем соответствующего изменения синхронности двух двигателей. Как упомянуто выше, способы изменения этой синхронности с помощью сигналов управления известны специалисту. Для осуществления предлагаемого изобретением способа в управлении необходима адаптированная к осуществлению способа программа управления, с помощью которой синхронность двигателей изменяется так, что возникают предлагаемые изобретением возрастающие и убывающие последовательности углов закрытия зева.
Следующие друг за другом относительные углы закрытия зева образуют в соответствии с изобретением либо возрастающие последовательности, в которых в течение заданного отдельного количества следующих друг за другом циклов движения в нескольких из этих циклов движения угол закрытия зева лежит после угла закрытия зева всех циклов движения, происходящих в течение этого отдельного количества, или они образуют убывающие последовательности, в которых в течение заданного отдельного количества следующих друг за другом циклов движения в нескольких из этих циклов движения угол закрытия зева лежит перед углом закрытия зева всех циклов движения, происходящих в течение этого отдельного количества.
Предпочтительно, если эти возрастающие и убывающие последовательности углов закрытия зева при работающей ткацкой машине следуют друг за другом в течение короткого времени, так что второе отдельное количество с возрастающей последовательностью в общем количестве циклов движения следует непосредственно за первым отдельным количеством с возрастающей последовательностью, или наоборот.
При испытаниях оказалось, что благодаря этому непрерывному возрастающему и убывающему изменению углов закрытия зева в стационарном процессе ткачества склонность нитей основы к сцеплению может уменьшаться. Процессы при разгоне и при торможении ткацкой машины и устройства зевообразования в рамках настоящего изобретения не рассматриваются.
С помощью предлагаемого изобретением способа во время процесса ткачества в течение продолжительного времени предотвращается пребывание всех нитей основы в параллельном, равномерно повторяющемся движении зева. Положения сводов нитей основы в ткацкой машине, таким образом, при каждом процессе закрытия зева, то есть при каждой встрече поднимающихся и опускающихся соседних сводов нитей основы различны. Кроме того, открытие зева в момент времени прибоя берда постоянно изменяется. Это означает, что своды нитей основы в этот момент времени в разных циклах движения принимают разный характер внутри ткацкой машины от навоя до опушки изделия. При прибое берда в нитях основы происходит повышение натяжения, которое при постоянно изменяющемся угле закрытия зева всегда другое.
В этом способе принципиально не играет роли, происходит ли при смещении вперед относительного момента времени закрытия зева или, соответственно, угла закрытия зева от одного цикла движения к следующему замедление, или ткацкая машина ускоряется. При более позднем угле закрытия зева, то есть возрастающей последовательности, справедливо обратное. Возможна также комбинация ускорения или, соответственно, замедления двух машин.
На практике при осуществлении предлагаемого изобретением способа выяснилось, что у быстро работающих ткацких машин даже очень медленное возрастание или, соответственно, убывание последовательностей углов закрытия зева на протяжении более 100 циклов движения приводит к желаемому результату. Однако особенно предпочтительно, когда общее количество циклов движения, в которое входят возрастающие и убывающие последовательности углов закрытия зева, составляет не более 100. Однако у медленно работающих машин применимо также общее количество, равное не более 50 циклов движения, в котором следуют друг за другом две отдельные последовательности, включающие в себя соответствующие первое и второе отдельные количества циклов движения.
Правильная величина общего количества и соответствующие отдельные количества зависят от вида ткани, от количества элементов зевообразования и от частоты вращения, с которой работают ткацкая машина и устройство зевообразования. При более высоких частотах вращения и больших подлежащих ускорению массах в машинах, привод которых осуществляется двумя двигателями, для такой возрастающей и убывающей последовательности углов закрытия зева необходимо большее количество циклов движения. Это объясняется тем, что дополнительная энергия, которая необходима для ускорения одной из двух машин во время изменения синхронности, не должна принимать слишком большие значения. Во всяком случае, целесообразно накапливать энергию, которая высвобождается при замедлении одной из двух машин, в промежуточном контуре устройства управления и снова использовать для последующего ускорения.
При осуществлении предлагаемого изобретением способа принципиально возможно, чтобы в каждом цикле движения угол закрытия зева был другим, чем угол закрытия зева предыдущего цикла движения.
Но для намеченного эффекта может быть также уже достаточно, если в течение некоторого количества циклов движения, которые не все должны непосредственно следовать друг за другом, углы закрытия зева возрастают или убывают в виде пологого участка.
Выяснилось, что является предпочтительным, если в отдельных количествах количество циклов движения, в которых пологий участок углов закрытия зева поднимается или опускается, составляет более 2 циклов движения. В большинстве случаев предусматриваются 3-15 циклов движения, при которых угол закрытия зева изменен по сравнению с предыдущим. Между циклами движения, в которых угол закрытия зева изменен по сравнению с предыдущим, могут также находиться такие, в которых угол закрытия зева не изменен по сравнению с предыдущим.
Известно, что у ткацких машин в уровне техники относительные моменты времени закрытия зева или, соответственно, углы закрытия зева устройства зевообразования, привод которого осуществляется собственным двигателем зевообразования, выбираются так, что при изменениях в переплетении измененный угол закрытия зева устанавливался с помощью сигналов управления. Изменение угла закрытия зева происходит при переходе от одной образованной несколькими следующими друг за другом рисунками переплетения первой последовательности переплетения к образованной другими рисунками переплетения второй последовательности переплетения.
До и после изменения угла закрытия зева соответствующие последовательности переплетения содержат различные рисунки переплетения.
Предлагаемый изобретением способ предусматривает, чтобы определенные изменения угла закрытия зева определялись преимущественно механическими параметрами ткацкой машины и машины зевообразования.
Поэтому в одном из вариантов осуществления предлагаемого изобретением способа предусмотрено задание возрастающих и убывающих последовательностей углов закрытия зева независимо от рисунка переплетения и от образованной несколькими рисунками переплетения последовательности переплетений. Это означает, что до возрастающей или убывающей последовательности углов закрытия зева последовательность переплетений может содержать такие же рисунки переплетения, как и после возрастающей или убывающей последовательности углов закрытия зева.
У ткацких рисунков, в которых рисунки переплетения нескольких следующих друг за другом циклов движения образуют последовательность переплетений, которые задают повторяющийся через короткие промежутки раппорт переплетения, отдельное количество циклов движения, в которых несколько углов закрытия зева образуют возрастающую или убывающую последовательность, может быть даже больше, чем количество циклов движения, которые задают раппорт переплетения.
Целесообразной с точки зрения ткачества оказалась также адаптация к соответственно предназначенной для введения нити утка. Предлагаемый изобретением способ может, однако, также осуществляться без учета последовательности уточин разных уточных пряж.
На предлагаемой изобретением ткацкой машине предусмотрена программа управления, которая адаптирована к выполнению предлагаемого изобретением способа; при необходимости требуются также еще специальные устройства управления для преобразования команд программы управления в сигналы двигателям.
Предпочтительным также является адаптированное устройство ввода, например, снабженное экраном и клавиатурами или полями меню, которые выбираются посредством касания экрана. При этом в предпочтительном варианте осуществления может задаваться одно или несколько значений для установления предлагаемых изобретением возрастающих или убывающих последовательностей углов закрытия зева. Это могут быть значения отдельного количества циклов движения, в которых несколько углов закрытия зева образуют возрастающую или убывающую последовательность; при необходимости первое и второе отдельное количество могут также вводиться независимо друг от друга.
Возможен также ввод начального значения и/или конечного значения угла закрытия зева возрастающей или убывающей последовательности углов закрытия зева вместе с величиной шага, которая определяет разницу угла закрытия зева между двумя следующими друг за другом циклами движения.
Оператор ткацкой машины привык задавать моменты времени, в которые зев закрыт в течение одного цикла движения, в виде углов закрытия зева. Поэтому предпочтительно, если имеются устройства или, соответственно, средства ввода, с помощью которых начальное и/или конечное значение возрастающей или убывающей последовательности относительных моментов времени закрытия зева может задаваться путем того, что может задаваться соответствующий каждому значению относительного момента времени закрытия зева угол закрытия зева главного вала ткацкой машины.
Возможны также варианты осуществления, в которых в течение заданного отдельного количества количество циклов движения, в которых угол закрытия зева изменяется по сравнению с каждым предыдущим циклом движения, задается оператором посредством устройства ввода.
Задание общего количества циклов движения, которое содержит как отдельное количество углов закрытия зева в возрастающей последовательности, так и отдельное количество углов закрытия зева в убывающей последовательности, при необходимости выполняется посредством адаптированного устройства ввода.
Значения отдельных или общих количеств циклов движения или начальные и конечные значения и/или величина шага возрастающих или убывающих последовательностей могут или полностью задаваться оператором, или же быть жестко запрограммированы в управлении. Предпочтительно также, чтобы в зависимости от номинального или среднего значения угла закрытия зева, который лучше всего подходит для соответствующей ткани, возрастающие и убывающие последовательности углов закрытия зева или, соответственно, относительных моментов времени закрытия зева рассчитывались адаптированной программой управления. Номинальное или среднее значение задается при этом оператором или вместе с другими данными, которые необходимы для изготовления данной ткани, загружаются в управление.
Адаптированная программа управления содержит в одном из предпочтительных вариантов осуществления предлагаемой изобретением ткацкой машины функции, с помощью которых программой управления рассчитываются не заданные оператором значения, которые необходимы для выполнения предлагаемого изобретением способа. При этом могут учитываться как уже введенные оператором для осуществления способа желаемые значения вышеназванного рода, так и введенные или сохраненные в управлении значения, которые зависят от механических или ткацких технологических параметров, например частота вращения, ширина/масса машины, количество элементов зевообразования, вид и количество нитей основы.
Возможна также загрузка необходимых для осуществления предлагаемого изобретением способа данных частично или полностью посредством носителя данных в устройство управления. Отдельные или некоторые из данных для осуществления предлагаемого изобретением способа, которые были введены, рассчитаны или загружены, могут при необходимости отображаться оператором на устройстве ввода и еще раз изменяться вручную.
Такого рода пологие участки или последовательности возрастающих или убывающих углов закрытия зева могут также использоваться целенаправленно для достижения определенных оптических эффектов. У тканей, оптический рисунок которых путем изменений угла закрытия зева значительно изменяется видимым образом, с помощью предлагаемого изобретением способа могут целенаправленно получаться структуры с полосами или лентами, которые проходят в направлении утка.
Ниже один из примеров осуществления изобретения с помощью фигур поясняется в деталях.
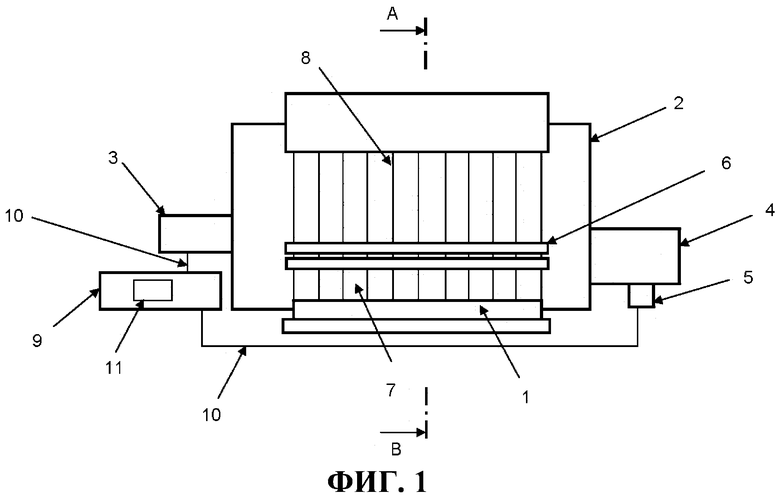
фиг.1 - ткацкая машина, снабженная устройством зевообразования, схематичный вид сверху;
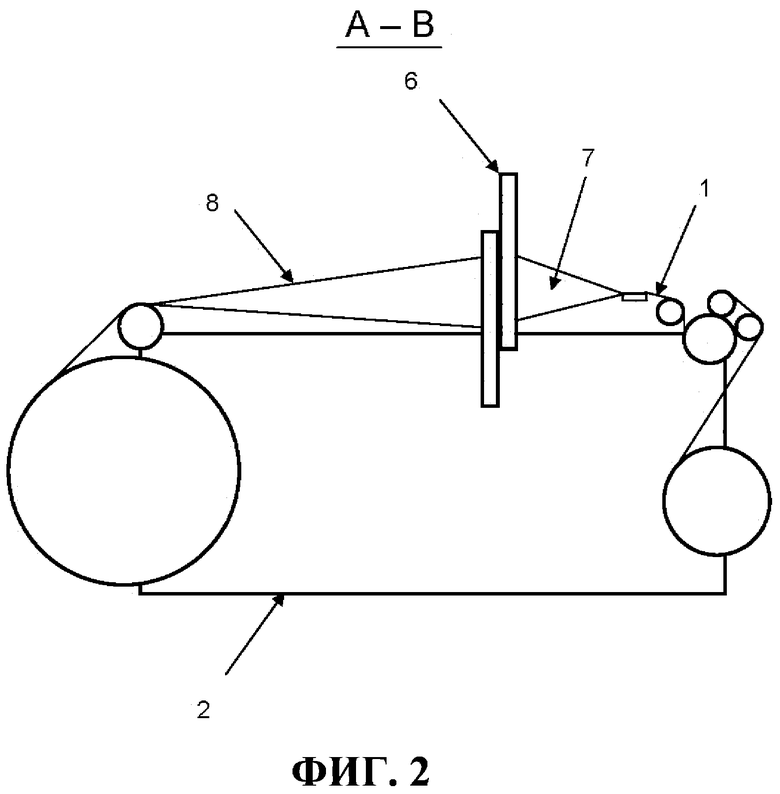
фиг.2 - ткацкая машина, снабженная устройством зевообразования, схематичный вид сечения A-B;
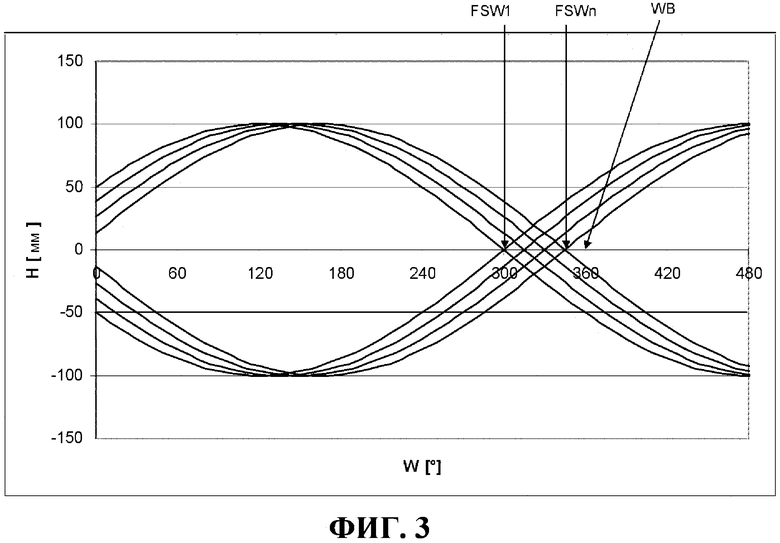
фиг.3 - наложенные друг на друга графики движения хода элементов зевообразования с разными углами закрытия зева в разных циклах движения;
фиг.4 - график изменения угла закрытия зева в течение нескольких циклов движения ткацкой машины, которая осуществляет один из примеров предлагаемого изобретением способа;
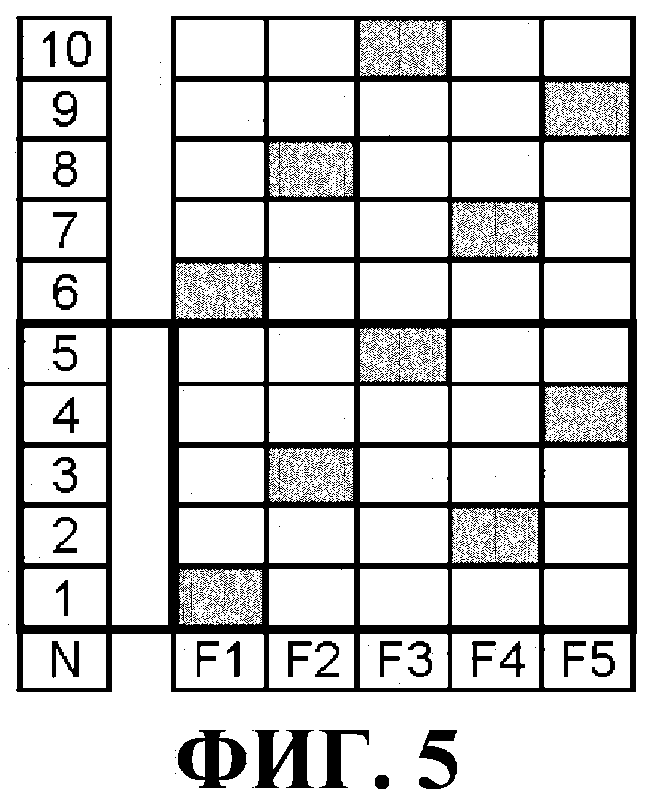
фиг.5 - пример патрона переплетения с раппортом переплетения.
На фиг.1 и 2 показана ткацкая машина 2, содержащая главный двигатель 3, устройство 4 зевообразования и двигатель 5 зевообразования. Нити 8 основы направляются элементами 6 зевообразования. Привод этих элементов осуществляется устройством 4 зевообразования с подъемом и опусканием, так что нитями 8 основы образуется зев 7.
В открытый зев 7 вводится нить утка (не изображена) и прибивается бердом (не изображено) к ткани 1.
Имеется устройство 9 управления. Оно передает сигналы 10 синхронизации двум двигателям 3, 5. Устройство 9 управления содержит программу управления, которая адаптирована к осуществлению предлагаемого изобретением способа. Это означает, что с помощью этой программы управления для циклов N движения, которые выполняются подряд при работающей ткацкой машине 2, при изменении синхронизации между двумя двигателями 3, 5 рассчитываются возрастающие или убывающие последовательности относительных моментов времени закрытия зева или углов FSWn закрытия зева, и что соответствующие сигналы 10 подаются двум двигателям 3, 5.
Расчет сигналов 10 синхронизации опирается в настоящем примере на данные, введенные оператором с устройства 11 ввода.
В этом примере осуществления предусмотрено, что оператором ткацкой машины 2 на устройстве 11 ввода устройства 9 управления могут задаваться следующие значения:
- начальное и конечное значение возрастающих и убывающих последовательностей углов FSW закрытия зева;
- величина шага, которая определяет разницу углов FSW закрытия зева между двумя следующими друг за другом циклами N движения.
Невведенные оператором, однако необходимые для осуществления способа значения заменяются стандартными значениями, рассчитанными в устройстве 9 управления или, соответственно, устройство 9 управления предлагает оператору такого рода значения.
Программа управления определяет также максимально допустимые предельные значения крутизны возрастающих и убывающих последовательностей углов FSW закрытия зева. При этом учитываются механические параметры ткацкой машины 2. Устройство 9 управления содержит для этого значение заданной оператором частоты вращения работающей ткацкой машины 2. В зависимости от частоты вращения крутизна возрастающих и убывающих последовательностей углов FSWn закрытия зева (см. фиг.4) не может превышать определенные значения, чтобы не перегружать двигатели 3, 5.
На фиг.3 показаны четыре разных графика H1, Hn открытия зева с разными углами FSWn закрытия зева. На этих графиках показан ход H свода 8 нитей основы между положением (H=0) закрытого зева и положением (H=100) открытого зева в течение 1,5 оборотов или, соответственно, 480 градусов угла W главного вала ткацкой машины. В диапазоне от W=300° до W=360° кривые H1, Hn хода проходят значение H=0 при соответствующих углах FSW1-FSWn закрытия зева. В диапазоне от W=20° до W=280° зев 7 в каждом случае открыт. Этот период времени служит для введения утка. При W=WB=360° или, соответственно, 0° нить утка прибивается к ткани 1. По какой из кривых H1, Hn с их соответствующими углами FSWn закрытия зева будет осуществляться каждый цикл N движения ткацкой машины 2, зависит от синхронизации между двумя двигателями 3, 5 ткацкой машины 2 и устройства 4 зевообразования в каждом цикле N движения. На самом деле при изменении синхронизации при работающей ткацкой машине получаются кривые H движения, которые отличаются от показанных здесь, так как при переходе от одного угла FSW1 закрытия зева к следующему углу FSW2 закрытия зева происходит искажение кривых. Видно также, что при изменении угла FSW закрытия зева величина открытия зева в момент времени прибоя WB берда бывает различной.
На фиг.4 для следующих друг за другом циклов движения ткацкой машины 2 нанесены соответствующие каждому циклу N движения углы FSW закрытия зева. В этом примере осуществления получаются возрастающие и убывающие последовательности углов FSW закрытия зева, из которых получаются возрастающие и убывающие последовательности относительных моментов времени закрытия зева при работающем устройстве 4 закрытия зева.
На фиг.4 видно, что общее количество Ng циклов движения содержит два отдельных количества Tn1 и Tn2. В отдельном количестве Tn1 следующие друг за другом углы FSW закрытия зева образуют возрастающую последовательность, при этом линия, которая соединяет точки на графике, поднимается от начального значения к конечному значению. В отдельной области Tn2 соответствующая линия проходит с понижением, углы FSW закрытия зева образуют в этой отдельной области убывающую последовательность.
Заданное оператором начальное значение угла FSW закрытия зева в изображенном примере осуществления составляет FSW3=300°, а заданное конечное значение составляет FSW12=345°. В настоящем случае программа управления составлена так, что угол FSW закрытия зева в каждом цикле N движения в отдельных количествах Tn1 и Tn2 изменяется, и что отдельные количества Tn1 и Tn2 равны. Поэтому изменения образуют равномерно возрастающие или, соответственно, убывающие последовательности с заданной величиной шага, равной 5°, между двумя следующими друг за другом циклами движения. Отсюда расчетным путем получаются отдельные количества Tn1=9=Tn2. В настоящем примере осуществления общее количество Ng циклов движения, которое содержит возрастающую и убывающую последовательность углов FSW закрытия зева, составляет соответственно Ng=18.
Управление начинает изображенный на фиг.4 процесс способа в заданный момент времени после пуска ткацкой и зевообразующей машины. Этот момент времени здесь является циклом движения с номером N=3. Однако возможны также другие моменты времени для начала способа. Эти моменты могут, в зависимости от варианта осуществления, быть жестко запрограммированы в программе управления или задаваться оператором. Может также предусматриваться включение или выключение предлагаемого изобретением способа оператором при работающей ткацкой машине.
Путем перерасчета графиков открытия зева с фиг.3 в ось времени и путем определения относительных моментов времени закрытия зева на этой, определяемой частотой вращения ткацкой машины оси времени, аналогичным образом, как на фиг.4, могли бы также образовываться возрастающие и убывающие последовательности относительных моментов времени закрытия зева вместо последовательностей углов FSW закрытия зева. Эти графики были бы, однако, разными для разных частот вращения ткацкой машины 2 и поэтому не так хорошо применимы.
На фиг.5 показана последовательность переплетений ткани в течение 10 циклов движения. Каждому циклу N движения соответствует рисунок переплетения в форме верхних или нижних положений нитей основы или направляющих эти нити основы элементов F1-F5 зевообразования, которые участвуют в зевообразовании. Это выражается в знакомом специалисту изображении патрона переплетения, на котором темные поля означают верхнее положение (=верхний зев) соответствующей нити основы или, соответственно, соответствующего элемента зевообразования. Следующие друг за другом рисунки переплетения могут изображаться в виде последовательности переплетений, которая у ткани в соответствии с фиг.5 повторяется с 6-го цикла движения; раппорт переплетения включает в себя, таким образом, 5 циклов движения.
При применении предлагаемого изобретением способа с последовательностями углов FSW закрытия зева в соответствии с фиг.4 у ткани с патроном переплетения в соответствии с фиг.5 отдельное количество Tn1=9 или Tn2=9 циклов движения, в которых несколько углов FSW закрытия зева образуют возрастающую или убывающую последовательность, больше чем количество N=5 циклов движения, которые определяют раппорт переплетения.
При сравнении фиг.4 и 5 становится ясно, что несколько углов FSW закрытия зева образуют возрастающую или убывающую последовательность, на которую не влияет последовательность переплетений или патрон переплетения. До возрастающей или убывающей последовательности углов FSW закрытия зева последовательность переплетений содержит те же самые рисунки переплетения, что и после возрастающей или убывающей последовательности углов FSW закрытия зева. Причем в примере в соответствии с фиг.4 и 5 не играет роли, в каком цикле N движения патрона переплетения начинается осуществление предлагаемого изобретением способа.
Список ссылочных обозначений
1 Ткань
2 Ткацкая машина
3 Главный двигатель
4 Устройство зевообразования
5 Двигатель зевообразования
6 Элемент зевообразования
7 Зев
8 Нити основы
9 Устройство управления
10 Сигналы синхронизации
11 Устройство ввода
FSW1, FSWn Угол закрытия зева в цикле 1…n движения
F1, Fn Номер элемента зевообразования
H Ход элементов зевообразования
N Номер цикла движения
Ng Общее количество циклов движения
Tn1, Tn2 Первое, второе отдельное количество циклов движения
W Угол поворота главного вала ткацкой машины
WB Угол главного вала ткацкой машины при прибое берда
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ МНОГОСЛОЙНОЙ ТКАНИ | 2012 |
|
RU2504605C1 |
| СПОСОБ ТКАЧЕСТВА И ВЕРТИКАЛЬНАЯ ТКАЦКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2726078C1 |
| Круглоткацкая машина и способы изготовления на ней тканых многослойных оболочек | 2023 |
|
RU2840903C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРЕХМЕРНОЙ ТКАНИ | 2015 |
|
RU2606221C2 |
| Ткацкий станок для формирования трехосной ткани | 2024 |
|
RU2832522C1 |
| СПОСОБ ВЫПОЛНЕНИЯ КРОМКИ ТКАНИ И ВСПОМОГАТЕЛЬНОЙ КРОМКИ, ОБРАЗОВАННОЙ С ПОМОЩЬЮ ДОПОЛНИТЕЛЬНОЙ НИТИ, ПРИ ИЗГОТОВЛЕНИИ ТКАНИ НА ТКАЦКИХ СТАНКАХ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2172798C2 |
| ТКАЦКАЯ МАШИНА, СНАБЖЕННАЯ ПЕРЕДВИЖНЫМИ ОГРАНИЧИТЕЛЬНЫМИ СРЕДСТВАМИ, А ТАКЖЕ СПОСОБ ИЗГОТОВЛЕНИЯ ТКАНИ | 2011 |
|
RU2541955C1 |
| Круглоткацкая машина и способы формирования на ней тканых многослойных оболочек | 2023 |
|
RU2840905C2 |
| ТКАЦКИЙ СТАНОК | 2000 |
|
RU2181153C1 |
| ТКАЦКАЯ МАШИНА, ИМЕЮЩАЯ УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ПЕРЕВИВОЧНОЙ КРОМКИ | 2014 |
|
RU2636308C2 |
Зевообразование на ткацкой машине (2), привод которой осуществляется главным двигателем (3), снабженной устройством (4) зевообразования, привод которого осуществляется двигателем (5) зевообразования, осуществляется таким образом, что в каждом цикле (N) движения ткацкой машины (2) образованный нитями (8) основы ткацкой машины (2) зев (7) в зависимости от рисунка переплетения открывается и закрывается, и при этом управление синхронностью двух двигателей (3, 5) происходит посредством сигналов (10) устройства (9) управления. В течение отдельного количества (Tn1, Tn2) циклов (N) движения синхронность двух двигателей (3, 5) изменяется таким образом, что несколько углов (FSW) закрытия зева, при которых зев (7) в соответствующих циклах (N) движения закрывается, образуют возрастающую или убывающую последовательность. 2 н. и 7 з.п. ф-лы, 5 ил.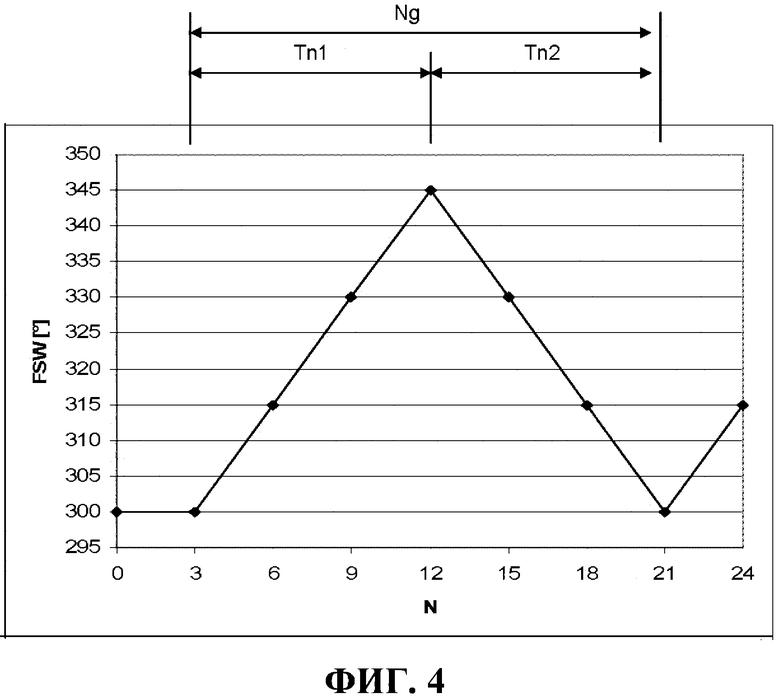
1. Способ зевообразования на ткацкой машине (2), привод которой осуществляется главным двигателем (3), снабженной устройством (4) зевообразования, привод которого осуществляется двигателем (5) зевообразования, причем в каждом цикле (N) движения ткацкой машины (2) образованный нитями (8) основы ткацкой машины (2) зев (7) в зависимости от рисунка переплетения открывают и закрывают, и причем управляют синхронностью двух двигателей (3, 5) посредством сигналов (10) устройства (9) управления, отличающийся тем, что в течение отдельного количества (Tn1, Tn2) циклов (N) движения синхронность двух двигателей (3, 5) изменяют таким образом, что несколько углов (FSW) закрытия зева, при которых зев (7) в соответствующих циклах (N) движения закрывается, образуют возрастающую или убывающую последовательность, причем при смещении вперед угла закрытия зева или при более позднем угле закрытия зева от одного цикла движения к следующему устройство зевообразования замедляется и/или ткацкая машина ускоряется, и причем в отдельном количестве (Tn1, Tn2) количество циклов (N) движения, в которых угол (FSW) закрытия зева изменяют по сравнению с каждым предыдущим циклом (N-1) движения, больше 2.
2. Способ по п. 1, отличающийся тем, что заданное общее количество (Ng) циклов (N) движения, которое составляет не больше 100, содержит как первое отдельное количество (Tn1) циклов (N) движения, в которых несколько углов (FSW) закрытия зева образуют возрастающую последовательность, так и второе отдельное количество (Tn2) циклов (N) движения, в которых множество углов (FSW) закрытия зева образуют убывающую последовательность.
3. Способ по п. 1 или 2, отличающийся тем, что оператором ткацкой машины (2) задаются следующие значения:
- начальное и конечное значение угла (FSW) закрытия зева для возрастающих или убывающих последовательностей углов (FSW) закрытия зева;
- величина шага, которая определяет разницу углов (FSW) закрытия зева между двумя следующими друг за другом циклами (N) движения.
4. Способ по п. 1 или 2, отличающийся тем, что рисунки переплетения нескольких следующих друг за другом циклов (N) движения образуют последовательность переплетений, которые определяют раппорт переплетения, и отдельное количество (Tn1, Tn2) циклов (N) движения, в которых несколько углов (FSW) закрытия зева образуют возрастающую или убывающую последовательность, больше, чем количество циклов (N) движения, которые определяют раппорт переплетения.
5. Способ по п. 1 или 2, отличающийся тем, что рисунки переплетения нескольких следующих друг за другом циклов (N) движения образуют последовательность переплетений, и до возрастающей или убывающей последовательности углов (FSW) закрытия зева последовательность переплетений состоит из таких же рисунков переплетения, что и после возрастающей или убывающей последовательности углов (FSW) закрытия зева.
6. Ткацкая машина (2), содержащая главный двигатель (3) для привода ткацкой машины (2), устройство (4) зевообразования, снабженное двигателем (5) зевообразования для привода устройства (4) зевообразования, и устройство (9) управления, посредством сигналов (10) которого возможно управление синхронностью двух двигателей (3, 5), отличающаяся тем, что устройство (9) управления снабжено программой управления, которая адаптирована к осуществлению способа по одному из пп. 1-2.
7. Ткацкая машина (2) по п. 6, отличающаяся тем, что снабжена устройством (11) ввода, с помощью которого оператором могут вводиться одно или несколько из следующих значений:
- начальное и/или конечное значение угла (FSW) закрытия зева возрастающей или убывающей последовательности углов (FSW) закрытия зева;
- величина шага для возрастающей или убывающей последовательности углов (FSW) закрытия зева;
- отдельное количество (Tn1, Tn2) циклов (N) движения, в которых несколько углов (FSW) закрытия зева образуют возрастающую или убывающую последовательность;
- общее количество (Ng) циклов (N) движения, которое содержит как первое отдельное количество (Tn1) углов (FSW) закрытия зева в возрастающей последовательности, так и второе отдельное количество (Tn2) углов (FSW) закрытия зева в убывающей последовательности.
8. Ткацкая машина (2) по п. 7, отличающаяся тем, что с помощью программы управления по введенным значениям могут рассчитываться сигналы (10) управления для осуществления способа по одному из пп. 1-2.
9. Ткацкая машина (2) по п. 8, отличающаяся тем, что при расчете сигналов (10) управления могут использоваться другие имеющиеся в устройстве управления данные.
| US 7341077 B2, 11.03.2008 | |||
| US 6525496 B1, 25.02.2003 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ ТКАЦКОГО СТАНКА С ЗЕВООБРАЗОВАТЕЛЬНЫМ МЕХАНИЗМОМ | 2001 |
|
RU2247178C1 |
| АВТОМАТИЗИРОВАННЫЙ ПРИВОД СТАНКА | 0 |
|
SU353436A1 |

