Ссылка на родственные заявки
Данная заявка притязает на приоритет совместно рассматриваемой предварительной патентной заявки США №60/779,935 под названием "Measurement Stitching for Improved Position Location in Wireless Communication System", поданной 6 марта 2006 г., права на которую принадлежат заявителю настоящей заявки, и которая включена сюда посредством ссылки.
Область техники
Данное раскрытие относится к системам определения положения и, в частности, к вычислению решений относительно положения для мобильных приемников.
Уровень техники
Глобальная система определения положения (GPS) это спутниковая навигационная система, или спутниковая система определения положения, призванная предоставлять информацию положения, скорости и времени практически в любой точке мира. GPS была разработана министерством обороны США и, в настоящее время, включает в себя группировку из двадцати четырех работоспособных спутников. Другие типы спутниковых навигационных систем включают в себя региональную систему радиоопределения местоположения со спутниковыми ответчиками на частоте запроса, (WAAS), Глобальную навигационную спутниковую систему (ГЛОНАСС), развернутую Российской Федерацией, и систему Galileo, планируемую Евросоюзом. Здесь, понятие "спутниковая система определения положения" (SPS) применяется в отношении GPS, Galileo, ГЛОНАСС, NAVSTAR, GNSS, системы, которая использует спутники из комбинации этих систем, псевдоспутниковых систем или любых SPS, которые будут созданы в будущем.
Различные приемники были спроектированы для декодирования сигналов, передаваемых со спутников, для определения положения, скорости или времени. В целом, для дешифровки сигналов и вычисления окончательного положения, приемник должен захватывать сигналы от спутников, находящихся в пределах прямой видимости, измерять и отслеживать принимаемые сигналы, и извлекать навигационные данные из сигналов. Благодаря точному измерению расстояния от трех разных спутников, приемник триангулирует свое положение, т.е. находит широту, долготу и высоту. В частности, приемник измеряет расстояние путем измерения времени, необходимого для распространения каждого сигнала от соответствующего спутника к приемнику. Для этого требуется информация точного времени. По этой причине, обычно необходимы измерения с четвертого спутника, которые позволяют определить общие ошибки измерения времени, например, ошибки, обусловленные погрешностями схем отсчета времени на приемнике.
В некоторых местах, например в городах с высокими зданиями, приемник может быть способен улавливать сигналы лишь от трех или менее спутников. В этих ситуациях, приемник будет неспособен найти все четыре параметра решения относительно положения: широту, долготу, высоту и время. Если приемник способен улавливать сигналы от трех спутников, приемник может, например, отказаться от вычисления высоты, чтобы найти широту, долготу и время. Альтернативно, если высоту можно получить внешними средствами, все четыре переменные можно найти из трех спутниковых сигналов. Если доступно меньше трех сигналов, приемник может оказаться не способным вычислить свое положение.
Для преодоления этого ограничения, во многих приемниках применяется гибридная технология определения положения, которая предусматривает использование сигналов от базовых станций системы беспроводной связи. Как и для спутниковых сигналов, гибридные приемники измеряют задержки по времени беспроводных сигналов для измерения расстояний от базовых станций сети. Гибридные приемники используют сигналы от базовых станций, а также любые полученные сигналы со спутников GPS, для нахождения переменных положения и времени. Гибридный метод определения положения нередко позволяет приемнику вычислять решение относительно положения в широком круге положений, где традиционные методы определения положения терпят неудачу. В беспроводных мобильных системах множественного доступа с кодовым разделением (CDMA), например, эта часть гибридного метода, связанная с измерением сигналов базовых станций, называется Advanced Forward Link Trilateration [усовершенствованная трилатерация на основе сигналов прямой линии связи] (AFLT).
Точность нахождения положения на приемнике зависит от точности измерения времени в системе. В синхронизированных системах, например, существующих системах CDMA, информация хронирования, передаваемая сотовыми базовыми станциями, синхронизируется с информацией хронирования от спутников GPS, благодаря чему точное время оказывается доступным во всей системе. В некоторых системах, например, Глобальной системе мобильной связи (GSM), информация хронирования не синхронизируется между базовыми станциями и спутниками GPS. В этих системах, устройства измерения положения (LMU) добавлены в существующую инфраструктуру для обеспечения точной информации хронирования для беспроводной сети.
Другой подход, который часто используется в системах и алгоритмах определения положения, предусматривает применение фильтров Калмана. Как известно, фильтр Калмана (ФК) представляет собой оптимальный рекурсивный алгоритм оценивания данных. Он часто используется для моделирования атрибутов движущихся тел, например, самолетов, людей, автомобилей и т.д. Эти атрибуты могут включать в себя, например скорость и положение. Текущее состояние системы и текущее измерение используются для оценивания нового состояния системы. На практике, фильтр Калмана объединяет все доступные данные измерений, плюс заранее известную информацию о системе, измерительных устройствах и статистике ошибок, для выработки оценки нужных переменных таким образом, чтобы статистически минимизировать ошибку.
В прошлом, фильтр Калмана, используемый в устройстве мобильной связи, обычно требовал определенных параметров инициализации от сопутствующей системы определения положения приемник. Например, при использовании приемника GPS, обычно получали одновременные измерения от, по меньшей мере, трех разных спутников, прежде чем можно было инициализировать фильтр Калмана. Это означает, что в одном периоде измерения, сигналы от, по меньшей мере, трех разных спутников принимаются и успешно обрабатываются устройством мобильной связи. Это требование снижает производительность мобильного устройства, поскольку на получение сигналов от трех спутников может потребоваться порядка десятков секунд, особенно в городских условиях. Если необходимые сигналы не получены или не получены вовремя, то часть мобильного устройства, отвечающая за определение положения, может потерпеть неудачу в инициализации, и может не работать правильно или эффективно.
Таким образом, обычная инициализация фильтра Калмана, используемого для определения положения мобильного устройства, требует, чтобы полное начальное состояние в некоторое время было сначала получено, чтобы можно было оценить обновленную информацию состояния определения положения для времени t>t0. Это ограничение подразумевает, что для мобильных приемников GPS в пограничных условиях распространения сигнала, например, с изменяющимися со временем препятствиями на линии распространения сигнала от спутников, может быть затруднительно или долго получать одновременные (т.е. в течение одного и того же периода) измерения дальности от, по меньшей мере 3 GPS спутников, необходимые для инициализации фильтра Калмана. Весьма желательно повысить производительность определения положения для мобильных приемников GPS в неблагоприятных условиях распространения сигнала, когда одновременность измерений дальности может своевременно не проявляться.
Соответственно, сохраняется необходимость в повышении возможностей определения положения для устройств мобильной связи, и чтобы они делали это своевременно и эффективно.
Сущность изобретения
Один аспект настоящего изобретения предусматривает способ оценивания положения устройства мобильной связи, содержащий этапы, на которых: задают начальное состояние фильтра определения положения посредством приближенного положения; обновляют фильтр определения положения посредством первого набора измерений, полученного в течение первого периода измерения из первого поднабора опорных станций, в котором первый поднабор включает в себя менее трех разных опорных станций; обновляют фильтр определения положения посредством второго набора измерений, полученного в течение второго периода измерения из второго поднабора опорных станций; и определяют оценку положения для устройства мобильной связи на основании обновленного фильтра определения положения.
Еще один аспект настоящего изобретения предусматривает способ оценивания положения устройства мобильной связи, содержащий этапы, на которых: задают начальное состояние фильтра определения положения посредством приближенного положения; обновляют фильтр определения положения посредством первого набора измерений, полученного в течение первого периода измерения из первого поднабора источников определения псевдодальности, в котором первый поднабор включает в себя менее трех разных источников определения псевдодальности; обновляют фильтр определения положения посредством второго набора измерений, полученного в течение второго периода измерения из второго поднабора источников определения псевдодальности; и определяют оценку положения для устройства мобильной связи на основании обновленного фильтра определения положения.
Еще один аспект настоящего изобретения предусматривает способ оценивания положения устройства мобильной связи, содержащий этапы, на которых: сохраняют набор измерений псевдодальности из набора опорных станций, снабженных метками времени согласно местному времени; затем устанавливают соотношение между местным временем и спутниковым системным временем; определяют спутниковое системное время сохраненного набора измерений псевдодальности; и используют сохраненный набор измерений псевдодальности, и спутниковое системное время этого набора измерений для определения положения мобильного устройства.
Еще один аспект настоящего изобретения предусматривает способ оценивания положения устройства мобильной связи, содержащий этапы, на которых: сохраняют набор измерений псевдодальности из набора опорных станций; затем определяют эфемеридную информацию для набора опорных станций; и используют сохраненный набор измерений псевдодальности, и вновь определенную эфемеридную информацию для определения положения мобильного устройства.
Еще один аспект настоящего изобретения предусматривает способ оценивания положения устройства мобильной связи, содержащий этапы, на которых задают начальное состояние фильтра определения положения посредством приближенного положения, обновляют фильтр определения положения посредством первого измерения псевдодальности, полученного в течение первого периода измерения из первого поднабора опорных станций, в котором первый поднабор включает в себя менее трех разных опорных станций; обновляют фильтр определения положения посредством второго измерения псевдодальности, полученного в течение второго периода измерения из второго поднабора опорных станций; определяют оценку положения для устройства мобильной связи на основании обновленного фильтра определения положения; и с использованием обратного распространения, определяют время для первого поднабора и второго поднабора.
Еще один аспект настоящего изобретения предусматривает устройство мобильной связи, содержащее первый приемник, способный принимать сигналы, относящиеся к спутниковой системе определения положения; второй приемник, способный принимать сигналы, относящиеся к сети связи; процессор, осуществляющий связь с первым и вторым приемником, процессор способен: a) задавать начальное состояние фильтра определения положения посредством первого измерения псевдодальности, полученного в течение первого периода измерения из первого поднабора опорных станций спутниковой системы определения положения, в котором первый поднабор включает в себя менее трех разных опорных станций; b) обновлять фильтр определения положения посредством второго измерения псевдодальности, полученного в течение второго периода измерения из второго поднабора опорных станций спутниковой системы определения положения; и c) определять оценку положения для устройства мобильной связи на основании обновленного фильтра определения положения.
На основании нижеследующего подробного описания, где, в порядке иллюстрации, показаны и описаны различные варианты осуществления, специалисты в данной области техники могут предложить другие варианты осуществления. Чертежи и подробное описание следует рассматривать как иллюстративные по природе и не ограничительные.
Краткое описание чертежей
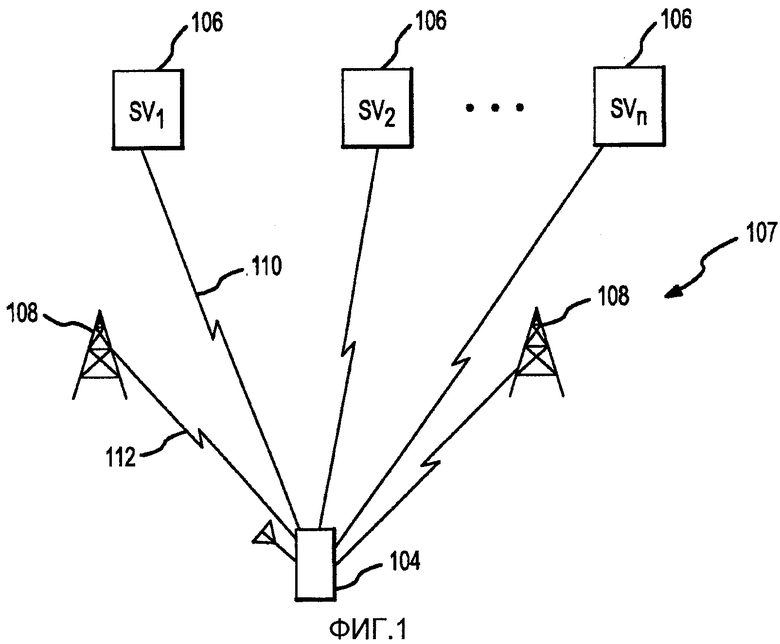
Фиг.1 - общая схема, демонстрирующая мобильное устройство, которое осуществляет связь с сотовой телефонной сетью и спутниковой системой определения положения.
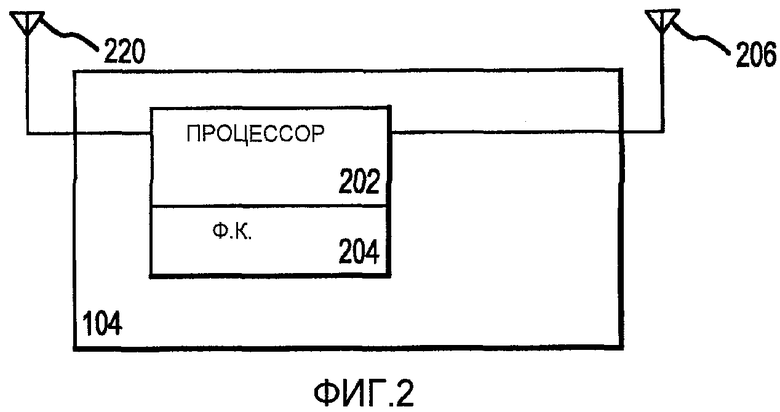
Фиг.2 - участки устройства мобильной связи согласно принципам настоящего изобретения.
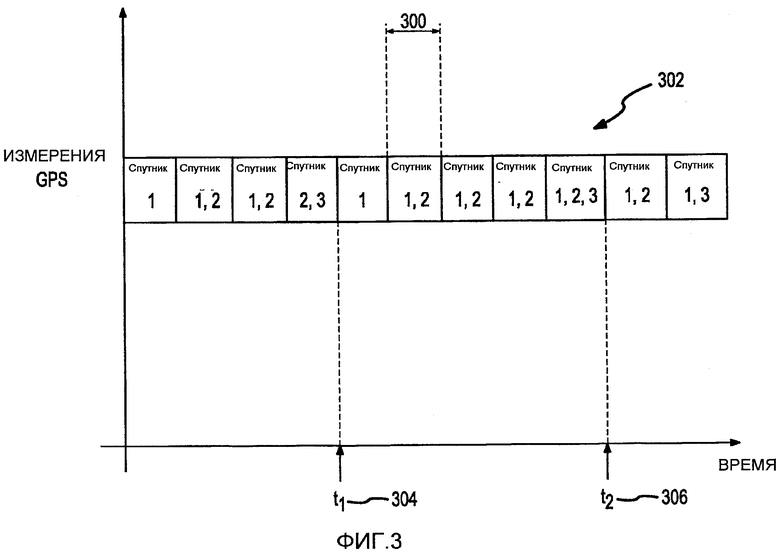
Фиг.3 - временная шкала измерений, принимаемых от различных спутников спутниковой системы определения положения.
Фиг.4 - логическая блок-схема иллюстративного способа определения положения мобильного устройства согласно принципам настоящего изобретения.
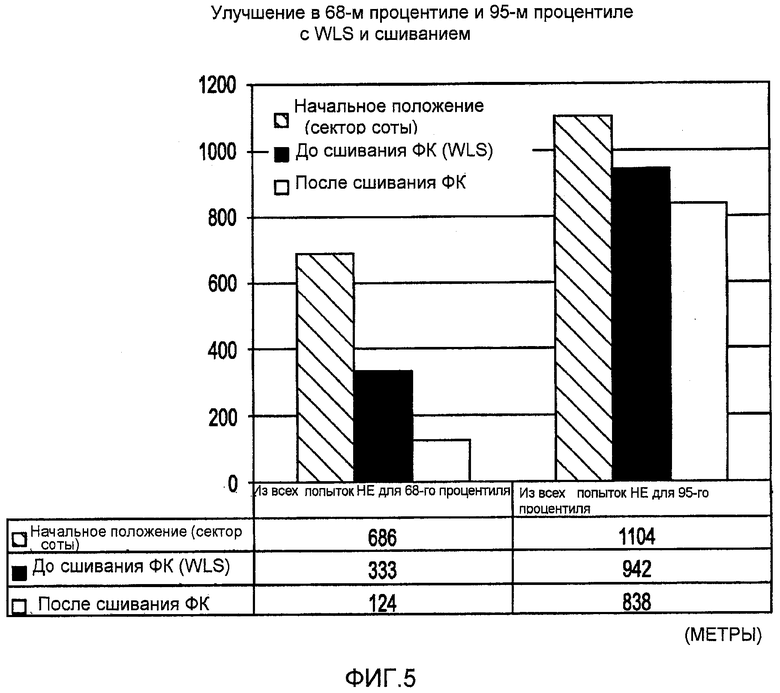
Фиг.5 - диаграмма, демонстрирующая повышение производительности благодаря использованию моделирования методом Монте-Карло, объединенного по множественным местам.
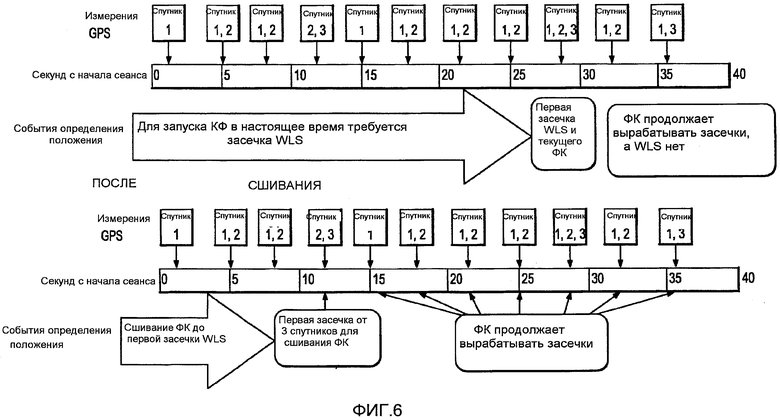
Фиг.6 - дополнительное уточнение усовершенствованного способа сшивания фильтров Калмана.
Фиг.7 - гипотетический пример, когда сеанс имеет тайм-аут в 16 секунд.
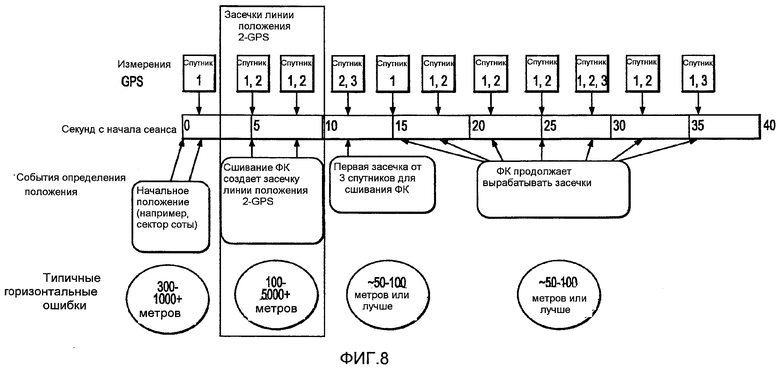
Фиг.8 - гипотетический случай, когда после захвата лишь 2 спутников, можно получить усовершенствованное исходное положение до получения измерений от 3 разных спутников.
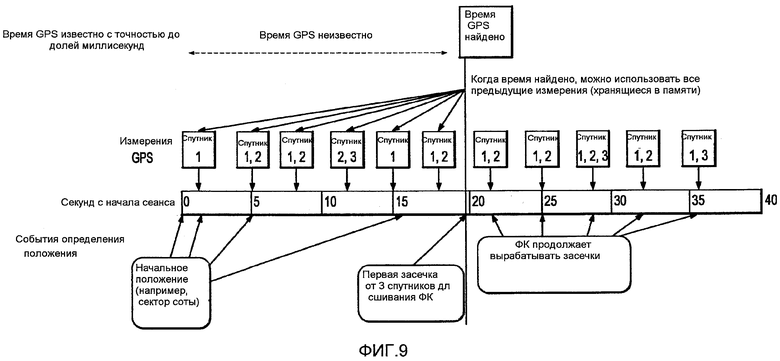
Фиг.9 - гипотетический случай, когда время GPS невозможно получить раньше, чем около 20 секунд после начала сеанса.
ПОДРОБНОЕ ОПИСАНИЕ
Подробное описание, приведенное ниже совместно с прилагаемыми чертежами, призвано описывать различные варианты осуществления настоящего изобретения, и не призвано представлять только варианты осуществления, в которых настоящее изобретение можно осуществлять на практике. Каждый вариант осуществления, описанный в этом раскрытии, представляет собой лишь пример или иллюстрацию настоящего изобретения, и не обязательно является предпочтительным или преимущественным над другими вариантами осуществления. Подробное описание включает в себя конкретные детали в целях обеспечения полного понимания настоящего изобретения. Однако специалистам в данной области техники очевидно, что настоящее изобретение можно осуществлять на практике без этих конкретных деталей. В ряде случаев, общеизвестные структуры и устройства показаны в виде блок-схемы, чтобы не затемнять принципы настоящего изобретения. Акронимы и другие специальные термины могут использоваться лишь для удобства и ясности, и не призваны ограничивать объем изобретения. Кроме того, в целях этого раскрытия, термин "присоединенный" означает "подключенный", и такое подключение может быть прямым, когда это применимо в контексте, или косвенным, например, через промежуточные или переходные устройства и другие средства.
Согласно фиг.1, мобильное устройство 104 может иметь вид любого из различных мобильных приемников, способных принимать навигационные сигналы (например, навигационные сигналы 110 спутников или сигналы 112 беспроводной связи) от опорных станций, например, спутников 106 и/или базовых станций 108, для вычисления решения относительно положения. Примеры включают в себя мобильный телефон, карманный навигационный приемник, приемник, установленный на транспортном средстве, например, самолете, автомобиле, грузовике, танке, корабле и т.п. Базовые станции 108 могут осуществлять связь с мобильным устройством 104 согласно любому из нескольких протоколов беспроводной связи. Один распространенный протокол беспроводной связи представляет собой протокол множественного доступа с кодовым разделением (CDMA), в котором мобильная связь одновременно осуществляется в радиочастотном (РЧ) спектре. В среде CDMA, методы можно рассматривать как механизм расширенной усовершенствованной трилатерации на основе сигналов прямой линии связи (AFLT). Другие примеры включают в себя Глобальную систему мобильной связи (GSM), в которой используется узкополосный режим множественного доступа с временным разделением (TDMA) для передачи данных, и общая радиослужба пакетной передачи (GPRS). В некоторых вариантах осуществления, мобильное устройство 104 может объединять в себе приемник GPS и устройство беспроводной связи для передачи речи или данных. Таким образом, хотя в этом документе описан конкретный пример системы GPS, принципы и подходы настоящего изобретения применимы к любой спутниковой системе определения положения или наземной системе определения положения, например, беспроводной сети.
Мобильное устройство 104 вычисляет решение определения положения на основании сигналов 110, 112, принятых от спутников 106 и базовых станций 108, соответственно. Мобильное устройство 104 принимает сигналы 110 со спутников 106, находящихся в пределах прямой видимости, и измеряет расстояние от каждого спутника путем измерения времени, необходимого для распространения каждого сигнала от соответствующего спутника к мобильному устройству 104, для определения измерения псевдодальности. Аналогично, мобильное устройство 104 также может принимать сигналы 112 от базовых станций 108 системы беспроводной связи 107, и измерять расстояния от базовых станций 108 на основании времени, необходимого для распространения каждого беспроводного сигнала от базовых станций к мобильному устройству. Мобильное устройство 104 обычно находит переменные положения и времени на основании измерений.
На фиг.2 показана блок-схема участков устройства мобильной связи 104, согласно принципам изобретения, которые относятся к определению положения мобильного устройства 104. Мобильное устройство 104 может включать в себя антенну 220, способную принимать сигналы от спутниковой навигационной системы или спутниковой системы определения положения, и другую антенну 206, способную принимать сигналы от наземной сети связи. Эти сигналы поступают на процессор 202, который включает в себя программные и аппаратные компоненты, обеспечивающие функции обработки сигнала в отношении сигналов. В частности, фильтр Калмана 204 реализован в составе мобильного устройства 104, который осуществляет функции определения положения мобильного устройства 104.
Как известно из уровня техники, фильтр определения положения, например фильтр Калмана 204, принимает входные измерения и реализует алгоритм нахождения нужных переменных на основании входных измерений и исторического состояния системы. Память, хотя и не показана, часто используется для хранения информации состояния и значений ковариационной матрицы для фильтра Калмана, которые обеспечивают меру ошибки, или определенности, оценок состояния, обеспечиваемых фильтром Калмана.
Мобильное устройство 104 может представлять собой, например, сотовый телефон или аналогичное устройство мобильной связи. Соответственно, существуют дополнительные функциональные блоки и устройства, которые являются частью мобильного устройства 104, которые не показаны на фиг.2. Эти дополнительные блоки и/или устройства обычно связаны с обработкой сигналов, поступающих от антенн 206, 220; обеспечением пользовательского интерфейса, обеспечением речевой связи; обеспечением передачи данных; и другими аналогичными функциями. Многие из этих функциональных блоков и устройств не связаны непосредственно с определением положения и, поэтому, не включены, чтобы не затемнять принципы настоящего изобретения.
Как было кратко объяснено выше, сигналы обычно принимаются со спутников посредством антенны 220. Затем эти сигналы декодируются и преобразуются в информацию положения с использованием общеизвестных алгоритмов и методов. В прошлом, для генерации засечки положения требовались сигналы от, по меньшей мере, трех спутников в течение одного периода измерения, с использованием модели взвешенных наименьших квадратов (WLS), которую можно использовать для инициализации фильтра Калмана 204. После инициализации фильтра Калмана, можно продолжать вырабатывать оценки положения на основании дальнейших измерений GPS. На фиг.3 показан сценарий, в котором измерения GPS 302 (от 1, 2 или 3 спутников) принимаются в течение отдельных периодов измерения 300 и ни одно из самых ранних измерений не включает в себя одновременные сигналы от трех разных спутников. Таким образом, несмотря на постоянное получение сигналов, которые включают в себя информацию положения, фильтр Калмана, используемый ранее, невозможно было инициализировать до получения измерений GPS от трех разных спутников в течение одного периода измерения (что обычно происходит в момент 306).
Напротив, варианты осуществления настоящего изобретения предусматривают использование информации определения положения, полученной в течение разных периодов измерения, для инициализации фильтра Калмана. Таким образом, три разных измерения из множественных, неодновременных периодов измерения доступны в момент 304 (значительно более ранний, чем момент 306), и фильтр Калмана способен обеспечивать засечку хорошего качества в более ранний момент времени. Предыдущее объяснение опирается на предположение, что для генерации засечки положения приемника требуются только три спутниковых сигнала измерения. Это предположение базируется на информации высоты, которая доступна из альтернативных источников, например, сети связи и пр. Альтернативно, если информация высоты недоступна, тот же принцип применяется для четырех спутников, вместо трех.
Еще до того, как станут доступны три спутниковых измерения определения положения, варианты осуществления настоящего изобретения могут использовать два измерения для значительного улучшения оценки на основании начального положения. Например, используя измерения от двух спутников, можно обеспечить оценку горизонтального положения, которая обычно, по меньшей мере, на 30% точнее начального положения и часто находится в пределах 100-500 метров.
На фиг.4 показана логическая блок-схема иллюстративного способа использования разных спутниковых измерений для обеспечения информации положения согласно принципам настоящего изобретения. На этапе 402, мобильное устройство начинает получать любую информацию, позволяющую определить положение, которая доступна из сети связи или из памяти. Например, высота в пределах 50 метров может быть доступна, как и положение в пределах нескольких сотен метров, при наличии вспомогательной системы GPS. Затем, на этапе 404, эта информация используется для инициализации состояния фильтра Калмана и ковариационной матрицы. Фильтр Калмана способен обеспечивать прогнозирование положения и скорости, а также корректировать предыдущий прогноз, для обеспечения текущих положения и скорости. Таким образом, сеть связи, память устройства, и другие источники могут обеспечивать начальное положение и оценки ошибки, которые задают начальное состояние фильтра Калмана.
Затем, на этапе 406, состояние фильтра Калмана и ковариационная матрица обновляются любой информацией положения, полученной от любого спутника. Например, если положение мобильного устройства на относительно малом участке земной поверхности (например, в секторе соты беспроводной сети) известно, то информацию псевдодальности от двух спутников можно использовать для идентификации сравнительно короткого прямолинейного отрезка, на котором располагается мобильное устройство. В порядке внутренней работы фильтра Калмана, ковариационные матрицы автоматически обновляются, и эти обновления отражают новую оценку ошибки для прогнозируемых значений. Таким образом, фильтр Калмана обеспечивает оценку, например на этапе 408, широты и долготы мобильного устройства совместно с оценкой ошибки или неопределенности. Кроме того, фильтр Калмана обеспечивает высоту мобильного устройства. На этапе 409 производится тестирование для определения, отвечают ли оценочные ошибки требованиям приложения. Если да, осуществляется переход к этапу 410, на котором приложению передаются оценочные значения широты, долготы и высоты. Если нет, осуществляется возврат к этапу 406. Специалисту в данной области техники очевидно, что различные математические манипуляции и преобразования координат можно осуществлять, чтобы гарантировать надлежащий формат загружаемой и обновляемой информации о состоянии и ковариационных матриц.
На фиг.5 показана диаграмма, демонстрирующая повышение производительности благодаря использованию моделирования методом Монте-Карло, объединенного по множественным местам. Горизонтальная ошибка (HE) для 68-го процентиля снижается с 333 м для WLS до 124 м для сшивания ФК. HE для 95-го процентиля снижается с 942 м для WLS до 838 м для сшивания ФК.
Согласно фиг.3, измерения GPS из последовательных периодов можно использовать для уменьшения ошибки (через фильтр Калмана), даже в отсутствие данных от других спутников. Таким образом, например, фильтр Калмана может использовать два соседние измерения от спутника "1", даже в отсутствие информации от другого спутника. В конечном итоге, при получении информации от дополнительных спутников, оценку от фильтра Калмана можно обновлять, соответственно, несмотря на то, что измерения не были приняты в течение одного и того же периода измерения. Наконец, после достаточного количества обновлений, фильтр Калмана сможет предсказать положение и скорость на уровне неопределенности, приемлемом для приложения.
Дополнительное уточнение усовершенствованного способа сшивания фильтров Калмана показано на фиг.6. Верхняя схема иллюстрирует традиционный сценарий временной шкалы измерения GPS для мобильного приемника, где фильтр Калмана невозможно инициализировать без, по меньшей мере 3, одновременных измерений GPS. Засечка положения методом WLS с использованием 3 спутников необходима для запуска процесса оценивания ФК, который в этом гипотетическом примере происходит примерно через 30 секунд после начала сеанса. Затем, ФК продолжает обновлять засечки положения, даже если в данный период доступно менее 3 спутниковых измерений. Напротив, нижняя схема показывает сценарий временной шкалы измерения GPS согласно изобретению, где фильтр Калмана может вырабатывать решение относительно положения с качеством типичным для GPS при наличии 3 неодновременных измерений GPS с использованием возможностей "сшивания", предусмотренных настоящим изобретением. В этом случае, процесс оценивания ФК начинается примерно через 10 секунд после начала сеанса, когда, по меньшей мере, 3 спутника успешно наблюдаются, хотя и в разные периоды. Кроме того, после этой успешной инициализации, ФК продолжает обновлять засечки положения, даже если в данный период доступно менее 3 спутниковых измерений.
Таким образом, усовершенствованный способ сшивания ФК, проиллюстрированный выше, позволяет значительно сократить время до первой засечки для мобильных приемников GPS в неблагоприятных условиях распространения сигнала. Кроме того, как описано выше, можно добиться повышенной точности определения горизонтального положения.
Еще одно преимущество этого изобретения состоит в улучшенном получении решения в неблагоприятных условиях распространения сигнала. Например, на фиг.7 показан тот же гипотетический пример, что и на фиг.6, но с добавлением гипотетического тайм-аута сеанса в 16 секунд. Традиционная засечка положения на основании оценки WLS не достигает правильного положения до засечки тайм-аут вследствие ее задержки около 30 секунд. С другой стороны, начальная засечка положения на основании сшивания ФК согласно этому изобретению может достигать правильной засечки за время, меньшее предела тайм-аута. Таким образом, этот способ может обеспечивать более высокую вероятность успешной засечки положения для мобильных приемников GPS в трудных условиях распространения сигнала.
Другим аспектом этого изобретения является улучшение в неопределенности исходного положения с использованием линии положения 2-GPS. На фиг.8 показан гипотетический случай, когда после захвата лишь 2 спутников, можно получить усовершенствованное исходное положение до получения измерений от 3 разных спутников. Эта особенность основана на геометрическом свойстве, состоящем в том, что определение трехмерного положения, имеющее два правильных измерения псевдодальности плюс высота, приводит к одномерной линии решения относительно положения. Это решение имеет только одну остаточную степень свободы по сравнению с полной засечкой положения, что приводит к снижению линейно неопределенности, и существенному снижению неопределенности по площади, по сравнению с исходным положением.
Еще один пример преимуществ этого изобретения состоит в том, что, если точное время GPS неизвестно в начале сеанса, можно использовать обратное распространение для использования прежних, сохраненных, измерений после получения точного времени GPS (с точностью до долей миллисекунды). Например, на фиг.9 показан гипотетический случай, когда время GPS невозможно получить раньше, чем около 20 секунд после начала сеанса. Другими словами, первый набор измерений дальности GPS можно получить и сохранить, но не сразу использовать, из-за недостатка информации время GPS. После определения времени GPS, устанавливается соотношение между местным временем и временем GPS, после чего ранее сохраненные измерения GPS можно связать с точным временем GPS и обработку обратного распространения можно использовать для извлечения ранее сохраненных данных для усовершенствованного определения положения. Таким образом, обратное распространение позволяет приемнику GPS полностью использовать все правильные спутниковые измерения GPS, даже если время GPS не получено сразу, что приводит к повышению производительности и точности.
Еще один пример преимуществ этого изобретения состоит в том, что, если точные эфемеридные данные спутника недоступны в начале сеанса, можно использовать обратное распространение для использования прежних, сохраненных, измерений после получения точных эфемерид. После получения эфемеридных данных, положение спутника известно, и затем ранее сохраненные измерения GPS можно связать с точными эфемеридными данными спутника и обработку обратного распространения можно использовать для извлечения ранее сохраненных данных для усовершенствованного определения положения. Таким образом, обратное распространение позволяет приемнику GPS полностью использовать все правильные спутниковые измерения GPS, даже если эфемеридные данные спутника не получены сразу, что приводит к повышению производительности и точности.
На практике, информация положения фильтра Калмана передается, на этапе 410, одному или нескольким приложениям, которые могут выполняться на мобильном устройстве. Например, службы на основе положения, например, местная служба погоды, могут использовать оценки положения с неопределенностью порядка километра или более. Напротив, службы "911" могут требовать, чтобы определенность оценок положения достигала 50 метров или менее. Соответственно, оценки положения (и скорости) можно передавать приложениями совместно с любыми оценками неопределенности или ошибки. Таким образом, каждое приложение может выбирать, достаточна ли оценка положения от фильтра Калмана для его требований.
Описанные здесь методы вещания разных типов передачи в эфире можно реализовать различными средствами. Например, эти методы можно реализовать в оборудовании, программном обеспечении или их комбинации. Для аппаратной реализации, устройства обработки на базовой станции, используемой для вещания разных типов передачи, можно реализовать в одной(м) или нескольких специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), устройствах цифровой обработки сигнала (DSPD), программируемых логических устройствах (PLD), вентильных матрицах, программируемых пользователем (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, способных осуществлять описанные здесь функции, или их комбинациях. Устройства обработки на беспроводном устройстве, используемом для приема разных типов передачи, также можно реализовать в одной(м) или нескольких ASIC, DSP и т.д.
Для программной реализации, описанные здесь методы можно реализовать посредством модулей (например, процедур, функций и т.д.), которые осуществляют описанные здесь функции. Программные коды могут храниться в запоминающем устройстве и выполняться процессором. Запоминающее устройство можно реализовать в процессоре или вне процессора, в каковом случае оно может присоединяться к процессору с возможностью обмена данными через различные средства, известные в технике.
Вышеприведенное описание позволяет специалистам в данной области техники применять на практике различные описанные здесь варианты осуществления. Специалисту в данной области должны быть очевидны различные модификации этих вариантов осуществления, и раскрытые здесь общие принципы можно применять к другим вариантам осуществления. Таким образом, формула изобретения не должна ограничиваться представленными здесь вариантами осуществления, но подлежит рассмотрению в полном объеме, согласующемся с языком формулы изобретения, где упоминание элемента в единственном числе не означает "один и только один", если конкретно не указано обратное, но означает "один или несколько." Все структурные и функциональные эквиваленты элементов различных вариантов осуществления, описанных в этом раскрытии, которые известны или станут известны позже специалистам в данной области техники, в явном виде включены сюда посредством ссылки и подлежат охвату формулой изобретения. Кроме того, раскрытая здесь информация не подлежит публичному оглашению, независимо от того, упомянуто ли явно такое раскрытие в формуле изобретения. Ни один элемент формулы изобретения не подлежит толкованию согласно положениям 35 U.S.C. §112, параграф шесть, если элемент не упомянут явно с использованием выражения "средство для", или, применительно к пункту способа, элемент не упомянут с использованием выражения "этап, на котором".

Изобретение относится к системам определения положения. Техническим результатом является повышение возможностей определения положения для устройств мобильной связи, причем чтобы они делали это одновременно и эффективно. Упомянутый технический результат достигается тем, что устройство мобильной связи использует способ определения положения с использованием фильтра определения положения, например фильтра Калмана, который инициализируется посредством измерений из опорных станций, например спутников и/или базовых станций, которые можно получить в течение разных периодов. Соответственно, фильтр определения положения можно использовать для оценивания положения без необходимости сначала получать, по меньшей мере, три разных сигнала в течение одного и того же периода измерения. 8 н. и 68 з.п. ф-лы, 9 ил.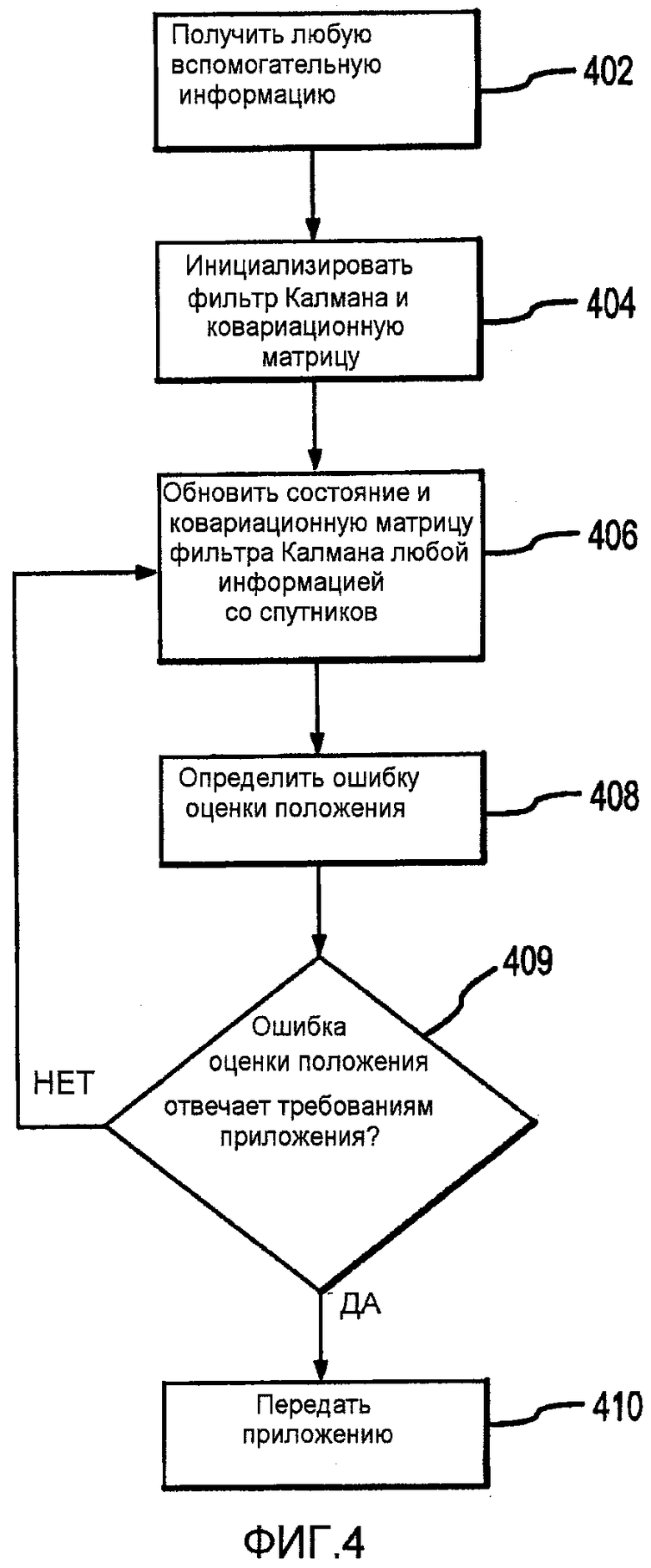
1. Способ вычисления навигационного решения в устройстве мобильной связи, содержащий этапы, на которых
сохраняют информацию первого измерения, полученную от первого поднабора опорных станций, причем упомянутая информация первого измерения недостаточна для вычисления навигационного решения; и
получают информацию второго измерения, позволяющую использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения, причем упомянутую информацию второго измерения получают из второго поднабора опорных станций после сохранения информации первого измерения, и при этом упомянутая полученная информация второго измерения позволяет использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
2. Способ по п.1, дополнительно содержащий этапы, на которых:
запускают сеанс измерения;
получают упомянутую информацию первого измерения от упомянутого первого поднабора опорных станций в первом временном периоде, причем упомянутый первый поднабор опорных станций содержит менее трех опорных станций, причем упомянутую информацию второго измерения получают во втором временном периоде, и при этом упомянутая информация первого измерения содержит информацию самого раннего измерения, полученную от любой опорной станции во время сеанса измерения;
объединяют упомянутую информацию первого и второго измерений; и
инициализируют фильтр положения, реализованный в упомянутом устройстве мобильной связи с помощью упомянутой объединенной информации измерений, причем упомянутую инициализацию выполняют в первый раз после запуска упомянутого сеанса измерения и до получения информации измерения от четырех разных опорных станций.
3. Способ по п.2, в котором упомянутая объединенная информация измерений, используемая для инициализации упомянутого фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
4. Способ по п.2, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом временном периоде.
5. Способ по п.2, в котором получение упомянутой информации второго измерения содержит получение системного времени.
6. Способ по п.2, в котором получение упомянутой информации второго измерения содержит получение эфемеридных данных.
7. Способ по п.2, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
8. Способ по п.2, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
9. Способ по п.2, дополнительно содержащий использование упомянутого инициализированного фильтра положения, реализованного в упомянутом устройстве мобильной связи, для вычисления упомянутого навигационного решения, которое содержит засечку положения упомянутого устройства мобильной связи.
10. Способ по п.2, в котором упомянутая информация первого измерения содержит одно или более измерений псевдодальности.
11. Устройство мобильной связи, содержащее:
приемник, выполненный с возможностью приема сигналов; и
процессор, связанный с упомянутым приемником, причем упомянутый процессор выполнен с возможностью:
сохранения информации первого измерения, полученной от первого поднабора опорных станций, причем упомянутая информация первого измерения недостаточна для вычисления навигационного решения; и
получения информации второго измерения, позволяющей использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения, причем упомянутую информацию второго измерения получают из второго поднабора опорных станций после сохранения упомянутой информации первого измерения, и при этом упомянутая информация второго измерения позволяет использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
12. Устройство мобильной связи по п.11, дополнительно содержащее:
фильтр положения, причем упомянутый процессор дополнительно выполнен с возможностью:
запускать сеанс измерения;
получать упомянутую информацию первого измерения от упомянутого первого поднабора опорных станций в первом временном периоде, причем упомянутый первый поднабор опорных станций содержит менее трех опорных станций, причем упомянутый процессор дополнительно выполнен с возможностью получать упомянутую информацию второго измерения во втором временном периоде, и при этом упомянутая информация первого измерения содержит информацию самого раннего измерения, полученную от любой опорной станции во время сеанса измерения;
объединять упомянутую информацию первого и второго измерений; и
инициализировать упомянутый фильтр положения с помощью упомянутой объединенной информации измерений в первый раз после запуска упомянутого сеанса измерения и до получения информации измерения от четырех разных опорных станций.
13. Устройство мобильной связи по п.12, в котором упомянутая объединенная информация измерений, используемая для инициализации фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
14. Устройство мобильной связи по п.12, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом временном периоде.
15. Устройство мобильной связи по п.12, в котором упомянутая информация второго измерения содержит системное время.
16. Устройство мобильной связи по п.12, в котором упомянутая информация второго измерения содержит эфемеридные данные.
17. Устройство мобильной связи по п.12, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
18. Устройство мобильной связи по п.12, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
19. Устройство мобильной связи по п.12, в котором упомянутый процессор дополнительно выполнен с возможностью использования упомянутого инициализированного фильтра положения для вычисления упомянутого навигационного решения, которое содержит засечку положения упомянутого устройства мобильной связи.
20. Устройство мобильной связи по п.12, в котором упомянутая информация первого измерения содержит одно или более измерений псевдодальности.
21. Устройство для вычисления навигационного решения, содержащее:
средство для сохранения информации первого измерения, полученной от первого поднабора опорных станций, причем упомянутая информация первого измерения недостаточна для вычисления навигационного решения; и
средство для получения информации второго измерения, позволяющей использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения, причем упомянутую информацию второго измерения получают из второго поднабора опорных станций после сохранения упомянутой информации первого измерения, и при этом упомянутая полученная информация второго измерения позволяет использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
22. Устройство по п.21, дополнительно содержащее:
средство для приема первых сигналов от упомянутого первого поднабора опорных станций и вторых сигналов от упомянутого второго поднабора опорных станций, причем упомянутый первый поднабор опорных станций содержит менее трех опорных станций, причем упомянутую информацию первого измерения получают из упомянутых первых сигналов в первом временном периоде, и при этом упомянутую информацию второго измерения получают из упомянутых вторых сигналов во втором временном периоде; и
средство для инициализации фильтра положения, реализованного в устройстве мобильной связи с помощью упомянутой информации первого измерения, объединенной с упомянутой информацией второго измерения, в первый раз после запуска сеанса измерения и до получения информации измерения от четырех разных опорных станций, причем упомянутая информация первого измерения содержит информацию самого раннего измерения, полученную от любой опорной станции во время сеанса измерения.
23. Устройство по п.22, в котором упомянутая объединенная информация измерений, используемая для инициализации упомянутого фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
24. Устройство по п.22, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства в упомянутом первом временном периоде.
25. Устройство по п.22, в котором упомянутая информация второго измерения содержит системное время.
26. Устройство по п.22, в котором упомянутая информация второго измерения содержит эфемеридные данные.
27. Устройство по п.22, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
28. Устройство по п.22, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
29. Устройство по п.22, дополнительно содержащее средство для использования упомянутого инициализированного фильтра положения, реализованного в упомянутом устройстве мобильной связи, для вычисления упомянутого навигационного решения, которое содержит засечку положения упомянутого устройства мобильной связи.
30. Устройство по п.22, в котором упомянутая информация первого измерения содержит одно или более измерений псевдодальности.
31. Процессорно-считываемый носитель, закодированный кодом команды, причем код команды, при выполнении устройством обработки, осуществляет навигацию, при этом код команды содержит:
код для сохранения информации первого измерения, полученной от первого поднабора опорных станций, причем упомянутая информация первого измерения недостаточна для вычисления навигационного решения; и
код для получения информации второго измерения, позволяющей использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения, причем упомянутую информацию второго измерения получают после сохранения упомянутой информации первого измерения, и при этом упомянутая полученная информация второго измерения позволяет использовать упомянутую информацию первого измерения при вычислении упомянутого навигационного решения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
32. Процессорно-считываемый носитель по п.31, в котором код команды дополнительно содержит:
код для получения упомянутой информации первого измерения от упомянутого первого поднабора опорных станций в первом временном периоде, причем упомянутый первый поднабор опорных станций содержит менее трех опорных станций, причем упомянутую информацию второго измерения получают во втором временном периоде, и при этом упомянутая информация первого измерения содержит информацию самого раннего измерения, полученную от любой опорной станции во время сеанса измерения;
код для объединения упомянутой информации первого и второго измерений; и
код для инициализации фильтра положения, реализованного в устройстве мобильной связи с помощью упомянутой объединенной информации измерений в первый раз после запуска упомянутого сеанса измерения и до получения информации измерения от четырех разных опорных станций.
33. Процессорно-считываемый носитель по п.32, в котором упомянутая объединенная информация измерений, используемая для инициализации фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
34. Процессорно-считываемый носитель по п.32, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом временном периоде.
35. Процессорно-считываемый носитель по п.32, в котором упомянутый код для получения информации второго измерения содержит код для получения системного времени.
36. Процессорно-считываемый носитель по п.32, в котором упомянутый код для получения информации второго измерения содержит код для получения эфемеридных данных.
37. Процессорно-считываемый носитель по п.32, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
38. Процессорно-считываемый носитель по п.32, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
39. Процессорно-считываемый носитель по п.32, в котором упомянутый код команды дополнительно содержит код для использования упомянутого инициализированного фильтра положения для вычисления упомянутого навигационного решения, которое содержит засечку положения упомянутого устройства мобильной связи.
40. Процессорно-считываемый носитель по п.32, в котором упомянутая информация первого измерения содержит одно или более измерений псевдодальности.
41. Способ вычисления навигационного решения в устройстве мобильной связи, содержащий этапы, на которых
вычисляют навигационное решение, основываясь, по меньшей мере частично, на информации начального измерения, полученной от первого поднабора опорных станций,
сохраняют информацию последующего измерения, полученную от второго поднабора опорных станций; и
обновляют упомянутое навигационное решение, основываясь, по меньшей мере частично, на упомянутой информации последующего измерения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
42. Способ по п.41, дополнительно содержащий этапы, на которых:
получают упомянутую информацию начального измерения от первого поднабора опорных станций в первом периоде после запуска сеанса для измерения засечки положения упомянутого устройства мобильной связи;
получают упомянутую информацию последующего измерения от упомянутого второго поднабора опорных станций во втором периоде после упомянутого первого периода;
объединяют упомянутую информацию начального и последующего измерений; и
инициализируют фильтр положения, реализованный в упомянутом устройстве мобильной связи с помощью объединенной информации измерений в первый раз после запуска упомянутого сеанса и до получения информации измерения от четырех разных опорных станций.
43. Способ по п.42, в котором упомянутая объединенная информация измерений, используемая для инициализации фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
44. Способ по п.42, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом периоде.
45. Способ по п.42, в котором получение упомянутой информации последующего измерения содержит получение системного времени.
46. Способ по п.42, в котором получение упомянутой информации последующего измерения содержит получение эфемеридных данных.
47. Способ по п.42, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
48. Способ по п.42, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
49. Способ по п.42, дополнительно содержащий использование упомянутого инициализированного фильтра положения, реализованного в упомянутом устройстве мобильной связи, для определения засечки положения упомянутого устройства мобильной связи, причем упомянутое навигационное решение содержит засечку положения.
50. Устройство для вычисления навигационного решения, содержащее
средство для вычисления навигационного решения, основываясь, по меньшей мере частично, на информации начального измерения, полученной от первого поднабора опорных станций,
средство для сохранения информации последующего измерения, полученной от второго поднабора опорных станций; и
средство для обновления упомянутого навигационного решения, основываясь, по меньшей мере частично, на упомянутой информации последующего измерения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
51. Устройство по п.50, дополнительно содержащее:
средство для получения упомянутой информации начального измерения от первого поднабора опорных станций в первом периоде после запуска сеанса для измерения засечки положения упомянутого устройства мобильной связи;
средство для получения упомянутой информации последующего измерения от упомянутого второго поднабора опорных станций во втором периоде после упомянутого первого периода;
средство для объединения упомянутой информации начального и последующего измерений; и
средство для инициализации фильтра положения, реализованного в упомянутом устройстве мобильной связи с помощью объединенной информации измерений в первый раз после запуска упомянутого сеанса и до получения информации измерения от четырех разных опорных станций.
52. Устройство по п.51, в котором упомянутая объединенная информация измерений, используемая для инициализации упомянутого фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
53. Устройство по п.51, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцию, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом периоде.
54. Устройство по п.51, в котором упомянутая информация последующего измерения содержит системное время.
55. Устройство по п.51, в котором упомянутая информация последующего измерения содержит эфемеридные данные.
56. Устройство по п.51, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
57. Устройство по п.51, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
58. Устройство по п.51, дополнительно содержащее средство для использования упомянутого инициализированного фильтра положения, реализованного в упомянутом устройстве мобильной связи, для определения засечки положения упомянутого устройства мобильной связи, причем упомянутое навигационное решение содержит засечку положения.
59. Процессорно-считываемый носитель, закодированный кодом команды, причем код команды, при выполнении устройством обработки, осуществляет навигацию, при этом код команды содержит:
код для вычисления навигационного решения, основываясь, по меньшей мере частично, на информации начального измерения, полученной от первого поднабора опорных станций,
код для сохранения информации последующего измерения, полученной от второго поднабора опорных станций; и
код для обновления упомянутого навигационного решения, основываясь, по меньшей мере частично, на упомянутой информации последующего измерения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
60. Процессорно-считываемый носитель по п.59, причем код команды дополнительно содержит:
код для получения упомянутой информации начального измерения от первого поднабора опорных станций в первом периоде после запуска сеанса для измерения засечки положения устройства мобильной связи;
код для получения упомянутой информации последующего измерения от упомянутого второго поднабора опорных станций во втором периоде после упомянутого первого периода;
код для объединения упомянутой информации начального и последующего измерений; и
код для инициализации фильтра положения, реализованного в упомянутом устройстве мобильной связи с помощью объединенной информации измерений в первый раз после запуска упомянутого сеанса и до получения информации измерения от четырех разных опорных станций.
61. Процессорно-считываемый носитель по п.60, в котором упомянутая объединенная информация измерений, используемая для инициализации упомянутого фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
62. Процессорно-считываемый носитель по п.60, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом периоде.
63. Процессорно-считываемый носитель по п.60, в котором упомянутая информация последующего измерения содержит системное время.
64. Процессорно-считываемый носитель по п.60, в котором упомянутая информация последующего измерения содержит эфемеридные данные.
65. Процессорно-считываемый носитель по п.60, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
66. Процессорно-считываемый носитель по п.60, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
67. Процессорно-считываемый носитель по п.60, в котором код команды дополнительно содержит код для использования упомянутого инициализированного фильтра положения, реализованного в упомянутом устройстве мобильной связи, для определения засечки положения упомянутого устройства мобильной связи, причем упомянутое навигационное решение содержит засечку положения.
68. Устройство мобильной связи, содержащее:
приемник, выполненный с возможностью приема сигналов; и
процессор, связанный с упомянутым приемником, причем упомянутый процессор выполнен с возможностью:
вычисления навигационного решения, основываясь, по меньшей мере частично, на информации начального измерения, полученной от первого поднабора опорных станций;
сохранения информации последующего измерения, полученной от второго поднабора опорных станций; и
обновления упомянутого навигационного решения, основываясь, по меньшей мере частично, на упомянутой информации последующего измерения в ответ на то, что упомянутая информация первого измерения и упомянутая информация второго измерения содержат неодновременные измерения, по меньшей мере, от трех разных опорных станций.
69. Устройство мобильной связи по п.68, дополнительно содержащее:
фильтр положения, причем упомянутый процессор дополнительно выполнен с возможностью:
получения упомянутой информации начального измерения от первого поднабора опорных станций в первом периоде после запуска сеанса для измерения засечки положения упомянутого устройства мобильной связи;
получения упомянутой информации последующего измерения от упомянутого второго поднабора опорных станций во втором периоде после упомянутого первого периода;
объединения упомянутой информации начального и последующего измерений; и
инициализации упомянутого фильтра положения с помощью объединенной информации измерений в первый раз после запуска упомянутого сеанса и до получения информации измерения от четырех разных опорных станций.
70. Устройство мобильной связи по п.69, в котором упомянутая объединенная информация измерений, используемая для инициализации упомянутого фильтра положения, содержит информацию измерения, полученную от трех разных опорных станций в течение множества неодновременных временных периодов.
71. Устройство мобильной связи по п.69, в котором упомянутый второй поднабор опорных станций включает в себя по меньшей мере одну опорную станцую, которая не находилась в пределах прямой видимости упомянутого устройства мобильной связи в упомянутом первом периоде.
72. Устройство мобильной связи по п.69, в котором упомянутая информация последующего измерения содержит системное время.
73. Устройство мобильной связи по п.69, в котором упомянутая информация последующего измерения содержит эфемеридные данные.
74. Устройство мобильной связи по п.69, в котором упомянутые первый и второй поднаборы опорных станций расположены на спутниках.
75. Устройство мобильной связи по п.69, в котором упомянутые первый и второй поднаборы опорных станций расположены на базовых станциях.
76. Устройство мобильной связи по п.69, в котором упомянутый процессор дополнительно выполнен с возможностью использования упомянутого инициализированного фильтра положения для определения засечки положения упомянутого устройства мобильной связи, причем упомянутое навигационное решение содержит засечку положения.
| US 6285316 B1, 04.09.2001 | |||
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БЕСПРОВОДНОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2235341C2 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 1926 |
|
SU6664A1 |
| US 5774829 A1, 30.06.1998 | |||
| US 20050288033 A1, 29.12.2005 | |||

