Изобретение относится к способу определения положения летающего объекта с помощью сенсорной системы, содержащей несколько регистрирующих посредством соответствующей оптики и светочувствительного матричного детектора фрагменты звездного неба астродатчиков с одинаковыми или разными полями обзора, разными направлениями обзора и обрабатывающее устройство для расчета информации о положении летающего объекта путем сравнения зарегистрированных фрагментов звездного неба со звездным каталогом.
Поскольку определение положения является весьма решающим для реализации запланированных миссий, повышению надежности таких систем придается особое значение. Астродатчики состоят из оптики, светочувствительного матричного детектора и обрабатывающего устройства для расчета информации о положении летающего объекта путем сравнения зарегистрированных фрагментов созвездий со звездным каталогом, который основан на инерциальной системе. Использование нескольких астродатчиков в системе позволяет повысить точность измерения положения и надежность.
Определение положения таких летающих объектов, как, например, спутники, космические станции, космические челноки и т.п., происходит способом с обработкой данных одного или нескольких астродатчиков, которые посредством заданного поля обзора ориентированы на фрагмент звездного неба и посредством обнаружения изображения сравнивают зарегистрированный в матричном детекторе фрагмент звездного неба с хранящимся в памяти звездным каталогом. После сопоставления фрагмента звездного неба положение летающего объекта определяется за счет того, что, например, с помощью алгоритма квеста по измеренным звездным векторам и данным звездного каталога определяются эйлеровы углы и/или кватернионы, которые трансформируются из системы координат сенсорной системы в систему координат летающего объекта. Чем больше звезд обрабатывается в сенсорной системе, тем больше его точность измерения. За счет ориентации отдельных датчиков в разных направлениях обзора достигается то, что погрешности трех пространственных углов (эйлеровы углы) приблизительно одинаковы по величине и минимальны.
Из ЕР 1111402 А1 известна сенсорная система, в которой расположены три астродатчика с ориентированными в разных направлениях полями обзора, причем каждый астродатчик регистрирует положения звезд и передает их на центральное обрабатывающее устройство, в котором определяется положение сенсорной системы и по ее ориентации относительно летающего объекта определяется положение последнего. Во избежание дополнительных погрешностей астрокамеры находятся на прочном блоке. Исследования надежности системы не проводятся.
Поскольку положение летающего объекта является решающим для осуществления предусмотренной миссии, требуется высокая надежность сенсорной системы.
Задачей изобретения является создание сенсорной системы для определения положения, которая обладала бы высокой точностью и компенсировала или уменьшала бы неполадки вследствие выхода из строя отдельных астродатчиков или компонентов системы.
Эта задача решается способом определения положения летающего объекта с помощью сенсорной системы, содержащей несколько регистрирующих посредством соответствующей оптики и светочувствительного матричного детектора фрагменты звездного неба астродатчиков с одинаковыми или разными полями обзора, разными направлениями обзора и обрабатывающее устройство для расчета информации о положении летающего объекта путем сравнения зарегистрированных фрагментов звездного неба со звездным каталогом, причем астродатчики находятся в сигнальном соединении между собой посредством системы шин, и, таким образом, данные для обеспечения высокой точности измерения передаются даже в случае выхода из строя компонентов. Каждый отдельный астродатчик преимущественно способен определять положение автономно. В системе шин происходит обмен сигналами, такими как данные различных уровней их обработки разной степени обработки, в результате чего можно предотвратить последствия выхода из строя компонентов отдельных астродатчиков в соответствии с их функцией.
Для осуществления способа оказалось предпочтительным, если астродатчик выполнен в виде мастер-датчика. В качестве мастер-датчика выбирается предпочтительно астродатчик, который особенно стабильно закреплен на платформе летающего объекта.
Системы координат отдельных астродатчиков вытекают из плоскости х-у матричного детектора и оси z в направлении обзора. Мастер-система координат представляет собой систему координат сенсорной системы. При этом мастер-система координат необязательно должна совпадать с системой координат мастер-датчика. Трансформация координат позволяет трансформировать данные положения отдельных астродатчиков в мастер-систему координат.Точно так же посредством матрицы положения, например в виде матрицы направляющих косинусов, может происходить трансформация мастер-системы координат в систему координат летающего объекта, так что последний получает текущее и непрерывно скорректированное положение в виде эйлеровых углов и/или кватернионов.
Отдельные астродатчики состоят преимущественно из оптики, матричного детектора, узла расчета звездных векторов и устранения нежелательных сигналов, узла со звездным каталогом для идентификации звезд, узла расчета информации о положении, преимущественно по алгоритму квеста, блока управления шинами с шинным интерфейсом, который выбирает, кодирует информацию для системы шин и управляет системой шины и узел вывода информации о положении мастер-системы координат или летающего объекта в соответствии с лежащей в основе инерциальной системой, а также выводит из супервизорного блока, контролирующего работу всех узлов датчика, сигнал качества, взаимодействует с блоком управления шинами и обеспечивает целесообразный информационный обмен между астродатчиками в зависимости от определяющих качество величин, таких как функционирование и сбой узлов отдельных астродатчиков и т.п.Кроме того, каждый астродатчик содержит тактовый генератор и блок питания. Предпочтительным образом астродатчики сенсорной системы работают со своими узлами параллельно, в горячем резерве. Для повышения точности сенсорной системы через системы шин информация датчиков о положении собирается в функциональном блоке, например мастер-датчике. Кроме того, имеется возможность сравнения между собой информации отдельных астродатчиков о положении, чтобы определить их неправильную ориентацию. В случае выхода из строя одного узла следующий астродатчик выполняет функцию вышедшего из строя узла. Для этого требуется целесообразный информационный обмен через систему шин. В целях рационального и рентабельного производства астродатчики сенсорной системы построены одинаково и могут использоваться также по отдельности. Если сенсорная система построена из однородных астродатчиков, то в распоряжении имеются достаточно резервные узлы, чтобы обеспечить высокую надежность при соответственно управляемом информационном обмене между астродатчиками.
Система шин может осуществлять обмен сигналами или данными между астродатчиками сенсорной системы преимущественно на трех уровнях обработки данных. Сенсорная система может быть выполнена избыточной или неизбыточной. Это значит, что астродатчики могут регистрировать разные и/или одинаковые поля обзора.
Первый уровень обработки данных касается, например, измеренных звездных векторов: это - единичные векторы в системе координат датчика, которые регистрируются матричным детектором. Данные просто предварительно обработаны за счет того, что отсортированы источники постороннего света. Они прошли аналого-цифровое преобразование, и уже была осуществлена субпиксельная интерполяция. Объем передаваемых на этом уровне данных зависит от числа наблюдаемых в соответствующем датчике звезд.
На втором, предпочтительном для обмена данными между астродатчиками уровне обработки данных передаются подготовленные данные. Для создания этих данных необходима идентификация созвездий. Вычисляются выражения, нужные для осуществления алгоритма квеста. Преимуществом этого вида передачи данных является уменьшение затрат на нее через сигнальное соединение при достижении точности, сопоставимой с данными первого уровня их обработки.
Поскольку расчет положения астродатчиками происходит предпочтительно по так называемому алгоритму квеста, предварительная обработка данных на втором уровне может осуществляться, например, следующим образом.
Элементы отражающего положение сенсорной системы кватернионного вектора q следуют из собственных значений 4х4 матрицы К:
с




и единичной 3х3 матрицы I.
3х3 матрица В и вектор Z содержат измеренные звездные векторы vi и соответствующие эталонные векторы wi из звездного каталога. Из-за аддитивной связи звездных векторов в уравнениях (2) и (5) матрица В и вектор Z в качестве интерфейсных величин второго уровня обработки данных могут использоваться как предварительно обработанные звездные векторы и передаваться через систему шин:


Bk и Zk представляют собой данные k-го астродатчика. Таким образом, достигается постоянная по сравнению с первым уровнем обработки данных точность связи звездного вектора при меньшем числе переменных и, тем самым, при меньших затратах на передачу. На третьем уровне обработки данных каждый отдельный астродатчик создает информацию о положении в виде эйлеровых углов и/или кватернионов, которая трансформируется в мастер-систему координат.Эти данные могут передаваться через систему шин. Вычисленные эйлеровы углы и/или кватернионы отдельных астродатчиков, как правило, лишь незначительно отличаются друг от друга. Результирующее положение летающего объекта по отношению к мастер-системе координат может быть вычислено затем путем образования средних значений соответствующих эйлеровых углов или элементов кватернионного вектора. В качестве альтернативы или дополнительно к этому методу расчета могут осуществляться расчеты положения летающего объекта на основе первого и/или второго уровня обработки данных. Отклонения от заданной, образованной, например, путем образования средних значений других астродатчиков величины данных о положении одного астродатчика указывают на сбой или неправильную ориентацию данного астродатчика. Данные о положении сообщающихся между собой астродатчиков могут использоваться для корректировки неправильных ориентации. При этом данные о положении мастер-датчика, который особенно стабильно соединен с платформой летающего объекта, могут служить эталоном. Отклонения данных о положении одного датчика используются для расчета матрицы положения, с помощью которой звездные векторы неправильно ориентированного астродатчика трансформируются перед дальнейшей обработкой, чтобы компенсировать его возможную неправильную ориентацию и повысить результирующую точность. Использование этого уровня обработки данных для взаимной корректировки возможных отклонений отличается особенной простой передачей данных и простой компенсацией возможных отклонений вычисленных положений астродатчиков, например, в мастер-системе координат, в системе координат летающего объекта или в инерциальной системе звездного каталога.
Кроме того, кооперирование астродатчиков на различных уровнях разной степени обработки данных обеспечивает компенсацию выходов из строя узлов одного или нескольких астродатчиков. Это имеет особое значение, поскольку астродатчики находятся на внешней обшивке летающего объекта и подвержены там особенно жесткому воздействию окружающей среды. Если, например, супервизорный блок одного астродатчика устанавливает выход из строя блока идентификации созвездий, то звездные векторы могут передаваться другому астродатчику, преимущественно мастер-датчику. В нем могут осуществляться тогда идентификация созвездий и дальнейшая обработка данных.
Три описанных уровня обработки данных обеспечивают высокую гибкость при надежной эксплуатации астродатчиков. В нижеследующей таблице приведен обзор поведения сенсорной системы с помощью типичных, не полностью перечисленных случаев выхода из строя, причем выделенные жирным шрифтом состояния могут быть решены предложенным способом с повышенной точностью измерения.
Бесперебойная работа реализуется преимущественно мастер-датчиком, который получает информацию о положении других астродатчиков преимущественно через средний уровень обработки данных. Другие астродатчики работают в горячем резерве и также выдают информацию о положении, однако с меньшей точностью. Существенные отклонения вычисленного положения от положения мастер-датчика могут использоваться для корректировки звездных векторов вышедшего из строя астродатчика посредством подходящего определения матрицы направляющих косинусов.
Летающий объект содержит оптимизированные для осуществления способа астродатчики, которые рассчитаны, в частности, в отношении высокой точности, небольшого влияния рассеянного света, высокой механической стабильности, высокой радиационной стойкости, небольшого энергопотребления, небольшой массы, достаточной вычислительной мощности и достаточного объема звездного каталога.
Предпочтительно используются астродатчики с полем обзора около 20° × 20° или круговым полем обзора 20°.
Связанные между собой астродатчики сенсорной системы для осуществления предложенного способа могут использоваться традиционным образом, в частности, при выходе из строя одного или нескольких из них или системы шин.
Изобретение включает в себя помимо предложенного способа сенсорную систему со связанными между собой астродатчиками, описанными в настоящих материалах заявки для его осуществления.
Изобретение более подробно поясняется на примерах его осуществления со ссылкой на чертежи, на которых изображают:
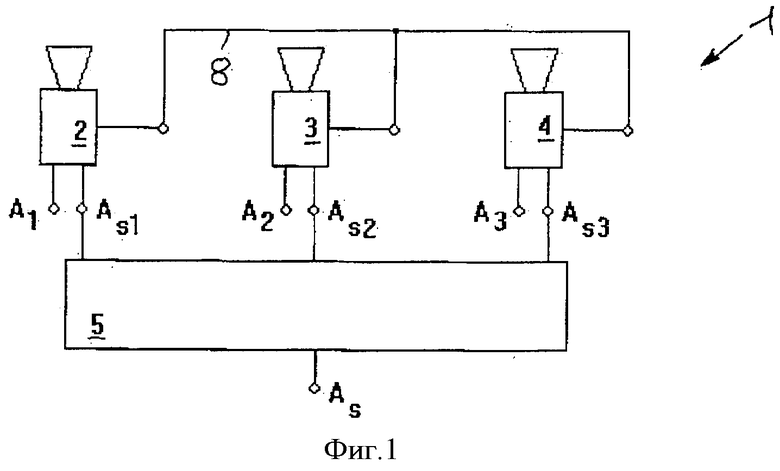
фиг.1 - схему сенсорной системы с шиной для сигнального соединения астродатчиков;
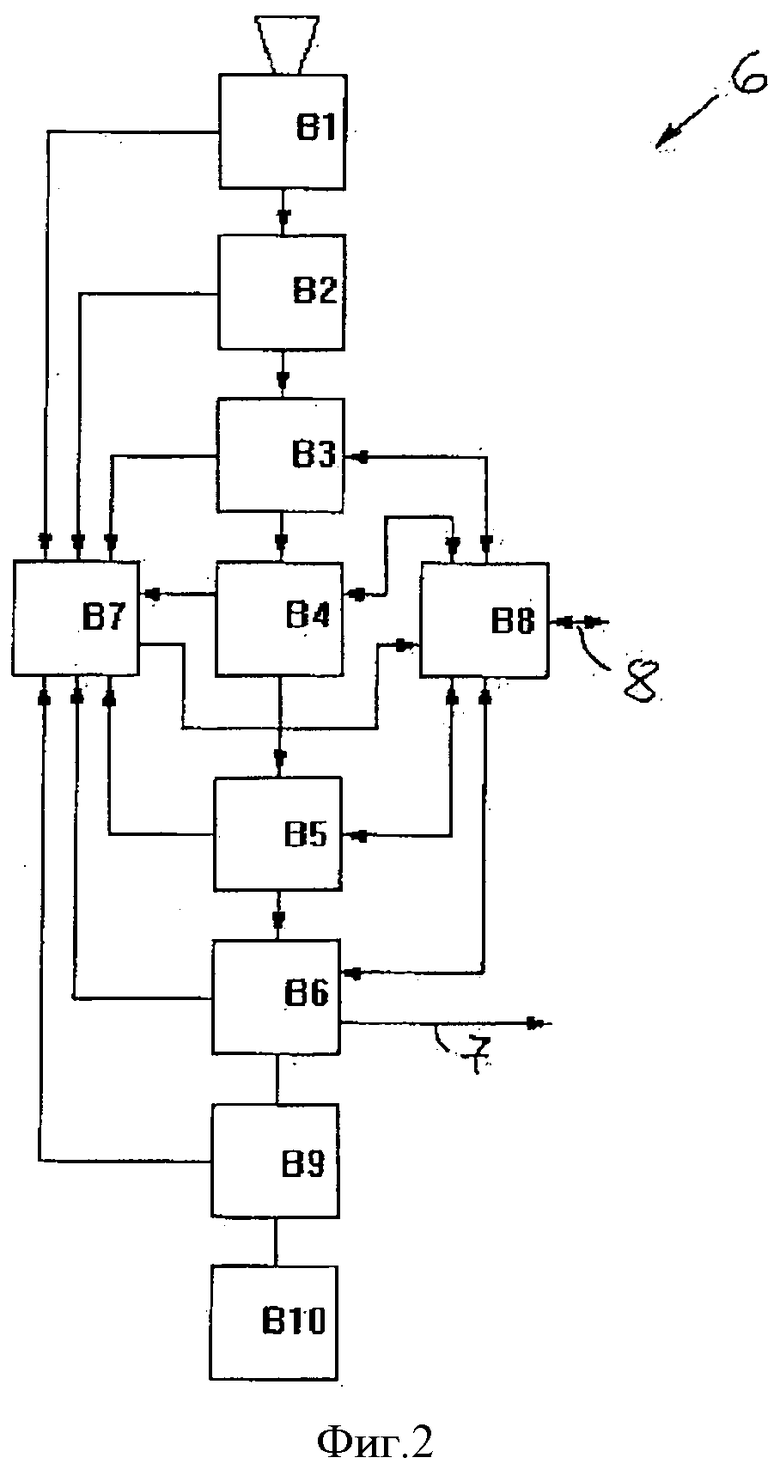
фиг.2 - схему астродатчика с его узлами.
На фиг.1 изображена установленная на летающем объекте (не показан) сенсорная система 1 с астродатчиками 2, 3, 4, находящимися в сигнальном соединении посредством системы 8 шин. При этом астродатчики 2, 3, 4 ориентированы своими оптическими осями в трех разных пространственных направлениях. Через созданное посредством системы 8 шин сигнальное соединение данные, например, трех разных уровней их обработки двунаправлено передаются в зависимости от команд блоков управления шинами отдельных астродатчиков 2, 3, 4. В качестве альтернативы на них могут быть предусмотрены дополнительные интерфейсы с разными сигнальными соединениями. При бесперебойной работе предварительно обработанные сигналы второго уровня обработки данных астродатчиков 3, 4 передаются выполненному в виде мастер-датчика астродатчику 2. В нем происходит затем дальнейшая обработка данных, преимущественно с алгоритмом квеста и необходимыми трансформациями для определения положения мастер-системы координат и положения летающего объекта в виде эйлеровых углов и/или кватернионов. Параллельно этому при бесперебойной работе астродатчики 3, 4, не являющиеся мастер-датчиками, автономно с помощью собственных измеренных звездных векторов определяют свое положение и трансформируют его в мастер-систему координат. При безупречном функционировании всех астродатчиков 2, 3, 4 возникают, в основном, одинаковые данные о положении по отношению к мастер-системе координат. В случае выхода из строя мастер-датчика (астродатчика 2) один из астродатчиков 3, 4 сенсорной системы 1 выполняет его функцию. При выходе из строя узлов астродатчиков 3, 4, не являющихся мастер-датчиками, супервизорный блок заботится о том, на каком уровне обработки данных мастер-датчику могут передаваться лишенные помех сигналы вышедшего из строя астродатчика, так что результирующий сигнал положения может определяться по максимальному числу звезд. Астродатчики 2, 3, 4 располагают помимо питающих выводов (не показаны) соответственно двумя выходами, из которых выходы A1, A2, А3 выдают не скорректированное положение, например в виде кватернионного вектора, тогда как выходы As1, As2, As3 отражают соответственно скорректированное положение соответствующего астродатчика 2, 3, 4, например в виде кватернионного вектора, причем оно скорректировано предпочтительно посредством данных остальных астродатчиков. Выходы As1, As2, Аs3 регистрируются обрабатывающим устройством 5 и определяются в нем, например, при соответствующем взвешивании достойной доверия информации о положении, подавлении недостойной доверия информации о положении и т.п. в виде объединенного положения, которое может трансформироваться, например, из мастер-системы координат в систему координат летающего объекта и, например, в виде кватернионного вектора выдается через выход As на систему управления летающего объекта.
На фиг.2 схематично изображен соответствующий, в основном, астродатчикам 2, 3, 4 астродатчик 6, содержащий астрокамеру В1 с объективом и матричным детектором, блок В2 предварительной обработки аналоговых данных с последующим аналого-цифровым преобразованием, блок В3 цифровой обработки данных с Centroiding и расчетом звездных векторов, блок В4 идентификации созвездий со звездным каталогом, блок В5 расчета кватернионов и/или эйлеровых углов, блок В6 выдачи с расчетом результирующих или корректированных данных о положении и их передачей на летящий объект по линии 7 передачи данных, супервизорный блок В7 для контроля функционирования узлов астродатчика 6, блок В8 управления шинами, тактовый генератор В9 и блок питания В 10. При бесперебойной работе система 8 шин передает преимущественно сигналы Bk и Zk второго уровня обработки данных с остальных астродатчиков мастер-датчику. Если супервизорный блок В7 констатирует сбои, то в зависимости от узлов с нарушенной работой выбирается передача сигналов, которая позволяет реализовать максимальную точность сенсорной системы 1 (фиг.1). Обрабатывающее устройство 5 (фиг.1) для корректировки данных о положении может быть реализовано как в астродатчиках, так и в виде самостоятельного блока. Хотя все астродатчики сенсорной системы построены преимущественно одинаково, в зависимости от рабочих состояний летающего объекта и/или сенсорной системы некоторые узлы могут быть отключены или не установлены, например для экономии энергии.
Перечень ссылочных позиций
1 - сенсорная система
2 - астродатчик
3 - астродатчик
4 - астродатчик
5 - обрабатывающее устройство
6 - астродатчик
7 - линия передачи данных
8 - система шин
A1 - выход
А2 - выход
А3 - выход
As1 - выход
As2 - выход
As3 - выход
As - выход
В1 - астрокамера с объективом и матричным детектором
B2 - блок предварительной обработки аналоговых данных с аналого-цифровым преобразованием
B3 - блок цифровой обработки данных, centroiding, расчет звездных векторов
B4 - блок идентификации созвездий со звездным каталогом
В5 - блок расчета кватернионов и/или эйлеровых углов
В6 - интерфейс выдачи
B7 - супервизорный блок
B8 - блок управления шинами
В9 - тактовый генератор
В10 - блок питания
| название | год | авторы | номер документа |
|---|---|---|---|
| Система калибровки и тестирования звездного датчика ориентирования | 2023 |
|
RU2811666C1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2023 |
|
RU2799623C1 |
| ОЦЕНКА ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НАКЛОНЯЮЩЕГОСЯ ТЕЛА С ИСПОЛЬЗОВАНИЕМ МОДИФИЦИРОВАННОГО КВАТЕРНИОННОГО ПРЕДСТАВЛЕНИЯ ДАННЫХ | 2001 |
|
RU2253092C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620288C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
Изобретение относится к способу повышения надежности сенсорных систем (1) для определения положения летающих объектов. Технический результат - повышение надежности таких систем. Астродатчики (2, 3, 4) сенсорной системы (1) построены преимущественно одинаково и соединены между собой двунаправленной системой шин. За счет наличия в сенсорной системе нескольких одинаковых узлов существует внутренняя избыточность, которая может использоваться через систему шин. Последняя обеспечивает передачу сигналов разных уровней обработки данных, так что передача данных разных уровней их обработки может быть согласована с вышедшими возможным образом из строя узлами. 2 н. и 6 з.п. ф-лы, 2 ил.
1. Способ определения положения летающего объекта с помощью сенсорной системы (1), содержащей несколько астродатчиков (2, 3, 4, 6) с одинаковыми или разными полями обзора и разными направлениями обзора, регистрирующих посредством соответствующей оптики и светочувствительного матричного детектора фрагменты звездного неба, и обрабатывающее устройство (5) для расчета информации о положении летающего объекта путем сравнения зарегистрированных фрагментов звездного неба со звездным каталогом, отличающийся тем, что астродатчики (2, 3, 4, 6) находятся в сигнальном соединении между собой посредством системы (8) шин, и между астродатчиками через систему шин осуществляют обмен данными по меньшей мере с одного уровня обработки данных из трех уровней обработки данных для компенсации выхода из строя узлов одного или нескольких астродатчиков, при этом данные первого уровня обработки данных включают в себя измеренные звездные векторы, данные второго уровня обработки данных включают в себя данные звездных векторов, подготовленные на основе данных звездного каталога, и данные третьего уровня обработки данных включают в себя информацию о положении астродатчика в виде эйлеровых углов и/или кватернионов.
2. Способ по п.1, отличающийся тем, что данные по меньшей мере одного астродатчика (2, 3, 4, 6) по меньшей мере одного уровня обработки данных передают через шину (8) данных на другой, неправильно работающий астродатчик (2, 3, 4, 6).
3. Способ по п.1, отличающийся тем, что данные по меньшей мере одного уровня обработки данных по меньшей мере одного астродатчика (2, 3, 4, 6) передают на обрабатывающий блок (5) или на используемый в качестве мастер-датчика астродатчик (2, 3, 4, 6).
4. Способ по п.1, отличающийся тем, что положение летающего объекта определяют с использованием усредненных значений данных по меньшей мере одного из уровней обработки данных.
5. Способ по п.1, отличающийся тем, что сбой астродатчика (2, 3, 4, 6) определяют с помощью заданного по меньшей мере на одном уровне обработки данных отклонения от среднего значения других астродатчиков (2, 3, 4, 6).
6. Способ по п.1, отличающийся тем, что сбой и/или неправильную ориентацию астродатчика (2, 3, 4, 6) корректируют посредством данных по меньшей мере одного уровня обработки данных по меньшей мере одного астродатчика (2, 3, 4, 6).
7. Способ по п.1, отличающийся тем, что астродатчик (2, 3, 4, 6), особенно прочно соединенный с платформой летающего объекта по сравнению с другими астродатчиками (2, 3, 4, 6), назначают мастер-датчиком, данные указанного астродатчика по меньшей мере одного уровня обработки данных используют с повышенным весом при определении или корректировке положения летающего объекта и/или корректировке астродатчика (2, 3, 4, 6).
8. Сенсорная система (1) для регулирования положения летающего объекта, содержащая несколько астродатчиков (2, 3, 4, 6) с одинаковыми или разными полями обзора и разными направлениями обзора, регистрирующих посредством соответствующей оптики и светочувствительного матричного детектора фрагменты звездного неба, и обрабатывающее устройство (5) для расчета информации о положении летающего объекта путем сравнения зарегистрированных фрагментов звездного неба со звездным каталогом, для осуществления способа по любому из пп.1-7.
| EP 1111402 A1, 27.96.2001 | |||
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| US 5206499 A1, 27.04.1993 | |||
| Экстрактор для виноградных выжимок | 1960 |
|
SU135065A1 |
| US 5055689 A1, 08.10.1991 | |||

