Настоящее изобретение относится к способам управления вращающимися электрическими машинами. В частности, настоящее изобретение относится к способу функционирования вращающейся электрической машины, управляющему устройству для электрического преобразователя частоты, системе двигателя, компьютерной программе и считываемому компьютером носителю данных.
Прямое управление по крутящему моменту (Direct Torque Control, DTC) является способом управления крутящим моментом и электромагнитным потоком во вращающихся электромагнитных машинах и двигателях, в частности, в области среднего напряжения. Типичный пример такого управления можно, например, найти в приводе ACS 6000 фирмы ABB. За последние 10 лет принцип DTC показал высокую надежность, безотказность и работоспособность.
Однако потери на коммутацию, возникающие вследствие коммутации полупроводников с помощью управляющего устройства, и представляющие собой значительную или большую часть суммарных потерь привода, в случае DTC могут быть значительными. Поэтому ищут возможности сократить эти потери на коммутацию. Известно, что подобное снижение потерь на коммутацию может быть достигнуто с помощью так называемого модельно-прогнозируемого прямого управления по крутящему моменту (Model Predictive Direct Torque Control, MPDTC), которое может базироваться на математической модели привода. Такой способ описан в публикациях US 7,256,561 и ЕР 1 670 135.
Наряду с минимизацией потерь на коммутацию преобразователя частоты, способы DTC и MPDTC могут иметь своей целью поддерживать в заданных пределах (гистерезиса) три выходные переменные или выходные величины вращающейся электрической машины, а именно, электромагнитный крутящий момент, величину потока статора и потенциал(-ы) нейтральной точки или средней точки.
Способ MPDTC основывается на алгоритме управления, который может включать в себя математическую модель, которая может быть адаптирована к коммутируемому преобразователю частоты и подключенной к нему машине или двигателю. При этом в частности, допустимые коммутирующие последовательности преобразователя частоты перечисляют на протяжении определенного горизонта коммутации, и вычисляют соответствующие траектории крутящего момента, потока статора и потенциала средней точки промежуточного контура с применением внутренней модели преобразователя частоты и машины. Существуют также преобразователи частоты с более, чем одной нейтральной точкой. Также существуют преобразователи частоты, для которых при необходимости нужно регулировать другие величины. При этом такие траектории экстраполируют до тех пор, пока не будет достигнут предел для соответствующих выходных величин. Допустимые коммутирующие последовательности оценивают с помощью заданного критерия добротности. Такой критерий добротности отражает, например, потери на коммутацию или частоту коммутации преобразователя частоты. На последнем этапе определяют оптимальную коммутирующую последовательность, минимизирующую такой критерий добротности, т.е. дающую, например, минимальные потери на коммутацию или минимальную частоту коммутации. Названные этапы, как правило, выполняют в каждом цикле управления, и для управления силовыми полупроводниковыми реле преобразователя частоты используют только первый этап из оптимальной коммутирующей последовательности, называемый первый коммутирующий переход или коммутирующее состояние.
Снижение потерь на коммутацию может привести к значительному сокращению расходов на эксплуатацию привода. Кроме того, подобное снижение потерь на коммутацию может привести к повышению надежности и безотказности системы и расширить область применения способа DTC, так как снижение потерь на коммутацию позволяет использовать то же оборудование с большей производительностью.
Задачей настоящего изобретения является создание электрических приводов с меньшими эксплуатационными расходами и большей производительностью.
Эта задача решается с помощью объектов, представленных в независимых пунктах формулы изобретения. Другие варианты изобретения следуют из зависимых пунктов формулы изобретения.
Первый объект изобретения относится к способу функционирования вращающейся электрической машины.
В соответствии с одним вариантом осуществления изобретения вращающаяся электрическая машина питается током посредством преобразователя частоты из коммутируемой схемы постоянного напряжения через, по меньшей мере, одну фазу. Преобразователь частоты предназначен для подключения, по меньшей мере, одной фазы к, по меньшей мере, двум уровням напряжения.
Вращающаяся электрическая машина может представлять собой электрический двигатель или электрический привод, который может включать в себя электрический двигатель и преобразователь частоты. Вращающаяся электрическая машина может включать в себя преобразователь частоты и/или управляющее устройство. Как правило, вращающаяся электрическая машина имеет три фазы (трехфазный ток). Однако возможно наличие только одной фазы или множества фаз.
В соответствии с вариантом осуществления изобретения способ включает в себя следующие этапы: генерацию коммутирующих последовательностей, причем каждая коммутирующая последовательность включает в себя ряд коммутирующих переходов преобразователя частоты с первым коммутирующим переходом; оценку каждой коммутирующей последовательности с помощью коэффициента добротности; выбор коммутирующей последовательности с минимальным коэффициентом добротности; управление коммутирующими элементами преобразователя частоты с первым коммутирующим переходом выбранной коммутирующей последовательности в качестве выбранного коммутирующего перехода так, что, по меньшей мере, одна фаза подключается к соответствующему коммутирующему переходу уровню напряжения.
При этом коммутирующий переход может быть определен с помощью коммутирующих состояний коммутирующих элементов преобразователя частоты или с помощью комбинации отдельных коммутирующих состояний. Например, коммутирующий переход включает в себя комбинацию коммутирующих состояний коммутирующих элементов преобразователя частоты. Коммутирующие элементы преобразователя могут представлять собой силовые полупроводниковые реле, например, тиристоры, биполярные транзисторы с коммутируемым затвором (IGCT) или биполярные транзисторы с изолированным затвором (IGBT).
Коммутирующая последовательность может, например, являться вектором U=[u(k), u(k+1),…, u(k+N-1)], где коммутирующие переходы определены с помощью комбинации и коммутирующих переходов. Для каждого подлежащего управлению коммутирующего элемента и содержит элемент коммутирующего состояния, который описывает коммутирующее состояние, например, 1, 0 или -1. Это могут быть положения переключателя.
В соответствии с одним вариантом осуществления изобретения коммутирующие последовательности генерируют следующим образом: (а) из более короткой коммутирующей последовательности генерируют более длинную коммутирующую последовательность, причем на более короткую коммутирующую последовательность подключают, по меньшей мере, один возможный коммутирующий переход с тем, чтобы получить более длинную коммутирующую последовательность; (b) вычисляют выходные величины электрической машины, преобразователя частоты и/или привода для более длинной коммутирующей последовательности на основании коммутирующих переходов более длинной коммутирующей последовательности; (с) отклоняют более длинную коммутирующую последовательность в случае, когда вычисленные выходные значения (или, по меньшей мере, одна выходная величина) лежат не внутри заданных пределов и/или вычисленные выходные величины со временем удаляются от заданного предела.
Короткая коммутирующая последовательность имеет, например, длину m, а более длинная коммутирующая последовательность, например, длину n, где n>=m+1. В случае когда коммутирующая последовательность содержит элементы прерывания, более длинная коммутирующая последовательность может быть на один шаг длиннее, чем короткая коммутирующая последовательность. Хотя возможен и случай, когда n=m+1.
В соответствии с вариантом осуществления изобретения первую коммутирующую последовательность или стартовую коммутирующую последовательность (длиной 0) инициализируют с помощью предварительно выбранного коммутирующего перехода. В этом случае первой коммутирующей последовательностью является более длинная коммутирующая последовательность, для которой выполняют этапы (b) и (с).
В соответствии с вариантом осуществления изобретения для неотклоненной более длинной коммутирующей последовательности на этапах (а)-(с) генерируют дополнительные коммутирующие последовательности, которые, в частности, длиннее, чем п.
Другими словами, итерационно генерируют дерево коммутирующих переходов, где каждая коммутирующая последовательность может быть представлена посредством пути от корня дерева к одному из листьев дерева. При этом вычисляемые выходные величины могут являться крутящим моментом или потоком вращающейся электрической машины или потенциалом или потенциалами средней точки промежуточного контура постоянного тока в преобразователе частоты или напряжением(-ями) через конденсаторы или током или токами через катушки преобразователя частоты. Выходные величины могут быть зависимыми от времени и вычисляться для интервала, который начинается в текущий момент времени и продолжается до определенного времени в будущем.
Это означает, что в случае вращающейся электрической машины или привода можно минимизировать потери на коммутацию с помощью итерационного способа управления, при котором предварительно вычисляют коммутирующие состояния или коммутирующие последовательности.
В соответствии с вариантом осуществления изобретения способ включает в себя: генерацию одной (более длинной) из допустимых коммутирующих последовательностей из одной более короткой из допустимых коммутирующих последовательностей посредством сцепления коммутирующих переходов на короткую коммутирующую последовательность посредством рекурсивного или итерационного алгоритма. Алгоритм может быть инициализирован с помощью коммутирующей последовательности длиной 0 из предыдущего выбранного коммутирующего перехода (или текущего приложенного к преобразователю частоты коммутирующего перехода). Допустимость более длинной коммутирующей последовательности может осуществляться путем моделирования или аппроксимации, по меньшей мере, одной выходной величины, которая, например, должна удовлетворять вышеназванным правилам.
Такое итерационное определение наиболее оптимальной из коммутирующих последовательностей выполняется, как правило, в каждом цикле коммутации преобразователя частоты.
Алгоритм или способ может обрабатываться последовательно, т.е. вместо того, чтобы сначала генерировать коммутирующие последовательности, а затем соответствующие им траектории выходных величин, пошагово создают коммутирующие последовательности, разветвляя или прицепляя допустимые коммутирующие переходы.
Для этого, например, используют стековую память. При этом стек или стековая память может являться памятью, в которой с помощью одной функции «Push» объект (здесь коммутирующая последовательность) может быть помещен на верх стека, а с помощью другой функции «Pop» находящийся наверху стека объект может быть извлечен из стека. Алгоритм может быть реализован с помощью рекурсивной функции вместе со стековой памятью.
В соответствии с одним вариантом осуществления изобретения способ или алгоритм MPDTC может базироваться на стековой модели магазинного типа (Last-In-First-Out). Алгоритм начинается с текущего временного такта k. Затем алгоритм предварительно итерационно просматривает дерево допустимых коммутирующих последовательностей. На каждом промежуточном такте все коммутирующие последовательности должны иметь траектории выходных величин, которые допустимы. Допустимые коммутирующие последовательности можно также называть возможными последовательностями или возможными коммутирующими последовательностями. Допустимые коммутирующие последовательности могут являться коммутирующими последовательностями, выходные величины которых лежат внутри соответствующих пределов, или указывают в правильном направлении, или приближаются к пределу. Последние два случая относятся к ситуации, когда выходная переменная или выходная величина не обязательно лежит внутри допустимых пределов, однако с каждым временным тактом внутри горизонта степень нарушения предела уменьшается.
Возможная коммутирующая последовательность, т.е. неотклоненная коммутирующая последовательность дает траектории выходных величин, которые на каждом временном такте удовлетворяют правилам этапа (с). Таким образом можно обеспечить соблюдение заданных пределов в любой момент стационарной работы вращающейся электрической машины. С помощью такой меры можно сократить полный коэффициент гармоник (THD) крутящего момента вращающейся электрической машины.
Для выходной переменной или выходных величин может быть справедлива комбинация вышеупомянутых условий или правил. Например, коммутирующая последовательность может быть допустима, когда крутящий момент и потенциал средней точки лежат внутри своих заданных пределов и поток статора указывает в правильном направлении.
Трудоемкость вычислений способа MPDTC напрямую зависит от количества допустимых коммутирующих переходов, коммутирующих переходов, задаваемых топологией преобразователя частоты (главным образом, числом уровней напряжения, которые может генерировать преобразователь частоты) и длиной горизонта коммутации или прогнозируемым горизонтом коммутирующей последовательности. При этом прогнозируемый горизонт можно определить как длину коммутирующей последовательности, т.е. количество временных тактов, необходимых для обработки коммутирующей последовательности.
Длинные горизонты коммутации существенно повышают производительность способа MPDTC благодаря сокращению потерь на коммутацию и/или суммарного гармонического искажения тока или крутящего момента (полного коэффициента гармоник, THD). Однако они могут приводить к большой вычислительной нагрузке, так как количество возможных коммутирующих последовательностей может комбинаторно резко увеличиваться. Поэтому до сих пор не представлялось возможным реализовать и осуществить способ MPDTC на аппаратной платформе при ограничении алгоритма очень короткими горизонтами коммутации, например, длиной 1 или 2. Настоящее изобретение позволяет снизить вычислительную нагрузку для способа MPDTC с длинными горизонтами коммутации.
В соответствии с вариантом осуществления изобретения коэффициент добротности основывается на ожидаемых потерях преобразователя частоты при коммутации или ожидаемой частоте коммутации преобразователя частоты для соответствующей коммутирующей последовательности. Как правило, справедливо, что чем меньше коэффициент добротности, тем меньше проявляются потери при коммутации.
Несколько коммутирующих переходов генерируют множество операций коммутирующих элементов преобразователя частоты, вследствие чего нарастает частота переключений коммутирующих элементов. Однако такая высокая частота переключений вызывает утечки тепла (за счет потерь на коммутацию) в силовых полупроводниковых реле как коммутирующих элементах, вследствие чего силовые полупроводниковые реле могут быстрее изнашиваться, повреждаться или полностью разрушаться. В целом потери на коммутацию преобразователя частоты можно косвенно оценить также с помощью частоты коммутации.
Также возможно функция добротности, т.е. функция, с помощью которой вычисляется коэффициент добротности коммутирующей последовательности, т.е. длина коммутирующей последовательности и общее число коммутирующих переходов.
В соответствии с одним вариантом осуществления изобретения функция добротности представляет собой функцию суммы потерь на коммутацию, возникающих вследствие отдельных коммутирующих переходов, и длины горизонта коммутации и/или прогнозируемого горизонта и/или длины коммутирующей последовательности. Потери на коммутацию могут вычисляться на основании токов статора вращающейся электрической машины и/или преобразователя, которые являются функцией потоков статора и ротора. В случае, когда управляющее устройство имеет внутреннюю математическую модель вращающейся электрической машины и/или преобразователя, эти потоки или токи статора могут составлять основную часть такой модели. В соответствии с этим вариантом осуществления изобретения можно существенно (до 22%) сократить потери на коммутацию по сравнению с простой функцией добротности, базирующейся на частоте коммутации. Такие вычисления можно осуществлять в автономном режиме, а результаты сохранять в справочной таблице, к которой может обращаться способ по время работы машины.
В соответствии с одним вариантом осуществления изобретения коммутирующие последовательности содержат в ряду коммутирующих переходов элементы прерывания, причем элемент прерывания определяет перерыв коммутации после коммутирующего перехода. Благодаря перерывам между коммутирующими переходами можно еще больше сократить потери на коммутацию.
В соответствии с вариантом осуществления изобретения перерывы коммутации определяют путем вычисления выходных величин. При этом вычисление выходных величин может основываться на математической модели вращающейся электрической машины, преобразователя частоты и/или привода или на аппроксимации. Как правило, во время перерыва коммутации выходные величины изменяются внутри своих пределов или удовлетворяют вышеупомянутым правилам.
Математическая модель привода преобразователя частоты и вращающейся электрической машины может применяться для вычисления количества тактов, при котором первая траектория выходной величины, например, крутящий момент, поток или потенциал средней точки, достигает одного из заранее заданных пределов или приближается к нему. Это может повысить точность прогнозирования и тем самым управляющие характеристики способа, например, в том, что касается потерь на коммутацию и крутящего момента.
В соответствии с вариантом осуществления изобретения способ также включает в себя: генерацию коммутирующей последовательности из коммутирующих переходов и элементов прерывания на основании обобщенного горизонта коммутации, который определяет, в какой очередности к коммутирующей последовательности присоединяют коммутирующие переходы и элементы прерывания.
Благодаря элементам прерывания достигается то, что выполняется как можно меньше коммутаций, чтобы как можно больше сократить потери на коммутацию. Поэтому добавляются перерывы коммутации с наибольшей длиной. Длина перерывов коммутации может определяться способом и ориентироваться на то, что выходные величины привода удовлетворяют вышеназванным заданным правилам.
Для генерации коммутирующих последовательностей может использоваться обобщенный горизонт коммутации. Обобщенный горизонт коммутации может включать в себя множество коммутирующих элементов, которые определяют, что на соответствующей позиции в коммутирующей последовательности может находиться коммутирующий переход. Между коммутирующими элементами, перед ними и после них обобщенный горизонт коммутации может включать в себя элементы прерывания. Для его описания используется нотация с «S» и «Е» или «е», элементы прерывания могут также толковаться как элементы экстраполяции или элементы увеличения. Примером обобщенного горизонта коммутации является «SSESE». С помощью обобщенного горизонта коммутации потери на коммутацию могут быть сокращены до 20% по сравнению с простым горизонтом коммутации длиной два.
Дополнительно обобщенный горизонт коммутации может начинаться с элемента прерывания «е», который обозначает факультативное ожидание в начале коммутирующей последовательности. Аналогично может определяться ожидание для элемента прерывания «Е». Таким образом прогнозируемый горизонт может быть значительно удлинен так, что может осуществляться более точное прогнозирование. Вследствие этого, как правило, снижаются потери на коммутацию.
Обобщенный горизонт коммутации со своим верхним пределом на основе количества коммутирующих переходов и тактов ожидания может рассматриваться в качестве альтернативы жесткому простому горизонту прогнозирования с фиксированным количеством временных тактов.
Обобщенный горизонт коммутации может приводить к различной во времени длине коммутирующих последовательностей и, следовательно, к прогнозируемым горизонтам различной длины. В соответствии с одним вариантом осуществления изобретения при вычислении выходных величин определяют, в какой момент времени в будущем траектория выходной величины достигает верхнего или нижнего заданного предела.
В соответствии с одним вариантом осуществления изобретения момент времени определяют аналитически, с применением метода оптимизации для вычисления нулевых значений, с помощью аппроксимации тригонометрической функции посредством рядов Тейлора и/или с помощью аппроксимации тригонометрической функции посредством кусочно-полиномиальных функций.
В соответствии с одним вариантом осуществления изобретения при определении момента времени в расчете учитывают сопротивление потока статора.
В соответствии с одним вариантом осуществления изобретения вычисление траекторий выходных величин базируется на математической модели вращающейся машины или привода и интерполяции. В отличие от экстраполяции интерполяция имеет то преимущество, что конечные точки траектории точнее совпадают с действительностью, чем при экстраполяции.
В соответствии с одним вариантом осуществления изобретения выходные величины интерполируют во временном интервале, включающем в себя заданное количество, например, по меньшей мере, 10 дискретных временных тактов.
В соответствии с одним вариантом осуществления изобретения в интервале или на его краях с помощью математической модели вычисляют выходные величины для, по меньшей мере, трех моментов времени.
В соответствии с одним вариантом осуществления изобретения интерполяция производится с помощью квадратичного полинома.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: вычисление коэффициента добротности, в частности, неотклоненной коммутирующей последовательности длины n в ходе итерации.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: вычисление нижнего предела коэффициента добротности, базирующегося на уже вычисленных коэффициентах добротности полных коммутирующих последовательностей.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: отклонение коммутирующих последовательностей, коэффициент добротности которых превышает нижний предел для коэффициентов добротности или больше, чем нижний предел для коэффициентов добротности.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: вычисление коэффициента добротности с применением верхнего предела для коммутирующей последовательности наибольшей ожидаемой длины.
В соответствии с вариантом осуществления изобретения сначала, т.е. в начале или перед рекурсией вычисляют коэффициент добротности многообещающей коммутирующей последовательности. При этом многообещающая коммутирующая последовательность может представлять собой коммутирующую последовательность, которая уже перед итерацией получилась с хорошим коэффициентом добротности или для которой уже перед итерацией был вычислен хороший коэффициент добротности.
В соответствии с одним вариантом осуществления изобретения многообещающая коммутирующая последовательность основывается на оптимальной коммутирующей последовательности из предыдущего цикла управления.
В соответствии с одним вариантом осуществления изобретения многообещающая коммутирующая последовательность базируется на оптимальной коммутирующей последовательности, вычисленной на предыдущем этапе оптимизации с более коротким горизонтом коммутации, чем текущий горизонт коммутации.
В соответствии с одним вариантом осуществления изобретения для этого может применяться двухступенчатый способ. Сначала (на первом этапе) решается задача оптимизации с коротким горизонтом коммутации, например, «eSE» например, с помощью выше и нижеописанного способа или алгоритма. Затем на втором этапе используют длинный горизонт коммутации, который длиннее короткого горизонта коммутации, например, «eSSESE». Выше и ниже описанный способ при этом применяют, например, так долго, пока не истечет доступное вычислительное время. На втором этапе в качестве стартового значения используют решение из первого этапа (также см. ниже алгоритм «теплого старта»).
Первая задача может быть решена сравнительно быстро, и может быть найдено сравнительно хорошее решение (коммутирующая последовательность). Это решение обеспечивает передачу на преобразователь частоты коммутирующего состояния, которое является коммутируемым, т.е., например, удовлетворяет ограничениям коммутации преобразователя частоты, обеспечивает отсутствие удаления выходных величин от заданных пределов (нестабильность) и удовлетворительные эксплуатационные характеристики (сравнительно низкие потери на коммутацию и т.п.). Можно обеспечить решение малых задач в рамках доступного вычислительного времени. Как правило, на втором этапе находят лучшее решение, которое можно передать на преобразователь частоты.
В соответствии с одним вариантом осуществления изобретения определяют просматриваемую коммутирующую последовательность с наиболее высоким приоритетом, причем в ходе следующей итерации, т.е. во время следующего этапа итерации или того же этапа итерации, просматривают коммутирующую последовательность с наиболее высоким приоритетом.
В соответствии с одним вариантом осуществления изобретения просматриваемые коммутирующие последовательности сортируются согласно их приоритетам.
В соответствии с одним вариантом осуществления изобретения назначение приоритетов выполняется на основании, по меньшей мере, одного из следующих правил: Назначение приоритета коммутирующих последовательностей, для которых существует более высокая вероятность того, что они ведут к низкому коэффициенту добротности; назначение приоритета коммутирующих последовательностей, для которых существует более высокая вероятность того, что они позволяют удерживать выходные величины в заданных пределах и/или выходные величины со временем приближаются к заданному пределу; назначение приоритета коммутирующих последовательностей, которые имеют коммутирующий переход, для которого существует более высокая вероятность того, что он приводит к допустимой коммутирующей последовательности или к коммутирующей последовательности с высокой добротностью; назначение приоритета коммутирующих последовательностей, для которых на основании оценки можно ожидать, что они приводят к длинным перерывам коммутации без коммутирующих переходов; назначение приоритета (неполных) коммутирующих последовательностей на основании их коэффициентов добротности; назначение приоритета коммутирующих последовательностей на основании их длины.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: завершение генерации коммутирующих последовательностей, когда сгенерированы все коммутирующие последовательности до заданной длины. Заданная длина при этом может являться длиной горизонта коммутации или заданного горизонта прогнозирования.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: завершение генерации коммутирующих последовательностей, когда достигнут верхний предел количества сгенерированных коммутирующих последовательностей или истекло доступное время вычислений.
В соответствии с одним вариантом осуществления изобретения способ также включает в себя: завершение генерации коммутирующих последовательностей, когда определена коммутирующая последовательность, коэффициент добротности которой превышает нижний предел для коэффициентов добротности менее чем на определенный процент, например, на 5%. Другими словами, может осуществляться также субоптимальный способ MPDTC, в котором определяют не оптимальные, но хорошие коммутирующие последовательности. Причина, по которой применяют субоптимальный способ MPDTC, понятна из нижеследующего.
Длинные горизонты коммутации приводят к отличным показателям. В случае поиска методом ветвей и границ, который будет подробно описан ниже, с помощью дерева поиска достаточно быстро находят оптимальное или близкое к нему решение даже в узком диапазоне пределов. Однако значительная часть вычислительного времени расходуется на подтверждение того, что найдено действительно оптимальное значение.
Таким образом, получается, что при остановке алгоритма до того, как получено такое подтверждение или сертификат, т.е. не осталось непроверенных узлов с коэффициентом добротности ниже, чем текущий минимальный коэффициент добротности, вероятно, что оптимальное значение уже найдено.
В случае способа MPDTC к приводу или его преобразователю частоты применяется только первое коммутирующее положение или первый коммутирующий переход из коммутирующей последовательности. Поэтому только первый элемент, а не остальная часть коммутирующей последовательности должен быть оптимальным.
Кроме того, можно быстро найти хорошую возможную коммутирующую последовательность с коротким горизонтом коммутации. Такая короткая коммутирующая последовательность может использоваться для того, чтобы с помощью далее подробно описанного алгоритма «теплого старта» начать поиск в дереве с длинным горизонтом коммутации.
В целом, может быть более предпочтительно вместо использования коротких горизонтов коммутации и гарантии нахождения оптимального решения во всех случаях, в отдельных случаях использовать длинные (возможно обобщенные) горизонты коммутации и довольствоваться субоптимальными решениями, которые в отдельных случаях ведут к способу MPDTC, который может демонстрировать лучшие характеристики.
Другой аспект изобретения относится к управляющему устройство для электрического преобразователя частоты, предназначенному для осуществления выше и ниже описанного способа.
Другой аспект изобретения относится к электрическому преобразователю частоты с управлением, предназначенному для осуществления выше и ниже описанного способа.
Например, преобразователь частоты на входе подключен к постоянному напряжению. На выходе (несколько или три фазы, трехфазный ток) преобразователь частоты генерируют переменное напряжение. Для этого могут использоваться коммутирующие элементы (например, тиристоры, биполярные транзисторы с коммутируемым затвором или биполярные транзисторы с изолированным затвором), переключаемые с помощью управляющего устройства. При этом напряжения могут составлять от 100 В до 200 кВ. Т.е. преобразователь частоты может являться низко-, средне- и высоковольтным преобразователем частоты. Коммутируемые преобразователем частоты токи могут составлять до 10000 А.
В частности, управляющий алгоритм или способ MPDTC может применяться для каждого многопозиционного преобразователя частоты.
Другой аспект изобретения относится к системе двигателя, которая включает в себя вращающуюся электрическую машину и электрический преобразователь частоты с управляющим устройством, предназначенным для снабжения током вращающейся электрической машины и осуществления выше и ниже описанного способа.
Другой аспект изобретения относится к компьютерной программе, которая при выполнении на процессоре управляет процессором для осуществления этапов способа, как описано выше и ниже.
Компьютерная программа или управляющий алгоритм MPDTC может быть реализована на любом аппаратном обеспечении, включающем в себя цифровые сигнальные процессоры (DSP) и программируемые пользователем вентильные матрицы (FPGA).
Другой аспект изобретения относится к считываемому компьютером носителю данных, на котором записана компьютерная программа.
При этом считываемым компьютером носителем данных может быть дискета, жесткий диск, USB-накопитель, ОЗУ, ПЗУ, CD-диск, DVD-диск, СППЗУ. Также считываемым компьютером носителем данных может быть сеть передачи данных, например, Интернет, позволяющая загружать программный код.
В целом, описанные варианты осуществления могут предоставить следующие преимущества: варианты осуществления способа из изобретения допускают достаточно длинные горизонты коммутации, состоящие из множества коммутирующих переходов, которые могут быть связаны с помощью элементов прерывания. Первые попытки делают очевидным тот факт, что с помощью комбинации вариантов осуществления изобретения можно на 60% снизить потери на коммутацию, одновременно улучшая на 20% суммарные гармонические искажения (полный коэффициент гармоник, THD) крутящего момента. Эти опыты выполнялись на так называемом трехфазном трехточечном преобразователе частоты среднего напряжения, приводящем в действие индукционную машину. По сравнению с простым алгоритмом MPDTC с простым горизонтом коммутации из только двух этапов, потери на коммутацию сократились на 40%, в то время как полный коэффициент гармоник крутящего момента оставался постоянным.
С помощью этих вариантов осуществления описывается, как возможно избежать генерации и просмотра коммутирующих последовательностей в случае, когда они субоптимальны. Тем самым можно значительно сократить среднее вычислительное время. Кроме того, можно задать критерии останова, позволяющие удостовериться в том, что найдено хорошее решение для коммутирующей последовательности. Таким образом ограничивают максимальное время вычислений.
В целом варианты осуществления описывают способы модификации и улучшения алгоритма MPDTC с тем, чтобы повысить его техническую эффективность для реализации способа с длинными горизонтами коммутации на доступном в текущий момент вычислительном аппаратном обеспечении. Результаты моделирования показывают, что в худшем случае вычислительные затраты можно сократить на 1 или 2 порядка при, в основном, неизменных характеристиках управления, прежде всего потерях на коммутацию и полном коэффициенте гармоник.
Далее со ссылками на сопроводительные фигуры подробно описаны примеры вариантов осуществления изобретения.
На фиг.1 показана трехфазная схема преобразователя частоты для переключения трех уровней напряжения в соответствии с одним вариантом осуществления изобретения.
На фиг.2а показаны траектории крутящего момента в соответствии с одним вариантом осуществления изобретения.
На фиг.2b показаны траектории потока статора в соответствии с одним вариантом осуществления изобретения.
На фиг.2с показаны коммутирующие последовательности в соответствии с одним вариантом осуществления изобретения.
На фиг.3 показано дерево поиска в соответствии с одним вариантом осуществления изобретения.
На фиг.4 показана блок-схема способа MPDTC в соответствии с одним вариантом осуществления изобретения.
На фиг.5 показан вариант вычисления траекторий выходных величин в соответствии с одним вариантом осуществления изобретения.
На фиг.6 показана блок-схема вычисления точек пересечения траекторий с пределами в соответствии с одним вариантом осуществления изобретения
На фиг.7 показана траектория выходной величины в соответствии с одним вариантом осуществления изобретения.
На фиг.8 показана блок-схема определения точки пересечения траектории с пределом в соответствии с одним вариантом осуществления изобретения.
На фиг.9 показана динамика коэффициентов добротности в соответствии с одним вариантом осуществления изобретения.
На фиг.10 показан фрагмент блок-схемы способа MPDTC в соответствии с одним вариантом осуществления изобретения.
На фиг.11 показана гистограмма с множеством узлов на каждом уровне дерева поиска в соответствии с одним вариантом осуществления изобретения.
На фиг.12 показана характеристика текущей добротности в ходе вычисления добротности в соответствии с одним вариантом осуществления изобретения.
Используемые на фигурах ссылочные обозначения и их значения приведены в сводном списке ссылочных обозначений. Как правило, идентичные или похожие элементы обозначены одинаковыми ссылочными обозначениями.
На фиг.1 показана трехфазная схема 2 преобразователя частоты для преобразователя 2 частоты для переключения трех уровней напряжения, где вращающаяся электрическая машина 1 связана с контуром 3 постоянного напряжения схемы 2 преобразователя частоты через фазы u, v, w. В общем случае вращающаяся электрическая машина 1 может быть соединена со схемой 2 преобразователя частоты для переключения m уровней напряжения, где m≥2. В соответствии с фиг.1 контур 3 постоянного напряжения образован с помощью первого конденсатора С1 и включенного последовательно с ним второго конденсатора С2. Контур 3 постоянного напряжения на первом конденсаторе С1 имеет первый главный контакт V+, на втором конденсаторе С2 второй главный контакт V- и образованный посредством двух включенных последовательно конденсаторов С1, С2 - делительный контакт NP (среднюю точку промежуточного контура). Кроме того, схема 2 преобразователя частоты для каждой фазы u, v, w имеет устройство 4 делительного преобразователя частоты, образованное первой коммутирующей группой или коммутирующим элементом 5, второй коммутирующей группой или коммутирующим элементом 6 и третьей коммутирующей группой или коммутирующим элементом 7, причем каждая коммутирующая группа 5, 6, 7 состоит из двух последовательно подключенных силовых полупроводниковых реле 9. Кроме того, в каждом устройстве 4 делительного преобразователя первая коммутирующая группа 5 соединена с первым главным контактом V+, а вторая коммутирующая группа 6 соединена со вторым главным контактом V-. Кроме того, первая коммутирующая группа 5 последовательно соединена со второй коммутирующей группой 6, при этом точка сопряжения первой коммутирующей группы 5 со второй коммутирующей группой 6 образует фазный контакт. Третья коммутирующая группа 7, выполненная в виде клеммного соединения, соединена с первой коммутирующей группой 5, в частности с точкой сопряжения двух последовательно соединенных силовых полупроводниковых реле 9 первой коммутирующей группы 5. Кроме того, третья коммутирующая группа 7 соединена со второй коммутирующей группой 6, в частности с точкой сопряжения двух последовательно соединенных силовых полупроводниковых реле второй коммутирующей группы 6. Кроме того, третья коммутирующая группа 7, в частности точка сопряжения двух последовательно соединенных силовых полупроводниковых реле третьей коммутирующей группы 7, соединена с делительным контактом NP.
Силовые полупроводниковые реле 9 первой и второй коммутирующих групп 5, 6 выполнены в виде регулируемых двунаправленных силовых полупроводниковых реле, причем силовые полупроводниковые реле третьей коммутирующей группы 7 выполнены в виде нерегулируемых однонаправленных силовых полупроводниковых реле 9. Однако возможно исполнение силовых полупроводниковых реле третьей коммутирующей группы 7 в виде регулируемых двунаправленных силовых полупроводниковых реле 9. Силовые полупроводниковые реле 9 представляют собой, например, тиристоры, биполярные транзисторы с коммутируемым затвором или биполярные транзисторы с изолированным затвором.
На фиг.1 показано управляющее устройство 10 преобразователя 2 частоты или системы привода (двигателя), включающее в себя преобразователь 2 частоты и электрическую машину 1. Управляющее устройство 10 с помощью линий 12 регулирования может управлять силовыми полупроводниковыми реле 9 и тем самым коммутирующими группами или элементами 5, 6, 7 и переключать их. Кроме того, возможно, чтобы управляющее устройство получало измерительные сигналы от электрической машины 1 через дополнительную измерительную линию 14. С помощью таких измерительных сигналов управляющее устройство 10 может определять выходные величины вращающейся электрической машины 1. Описанные алгоритмы и способы могут выполняться как программные модули на процессоре 16 управляющего устройства 10.
В соответствии со способом фазы u, v, w схемы 2 преобразователя частоты, представляющей собой в общем случае схему 2 преобразователя частоты для коммутации m уровней напряжения, в каждом цикле управления управляющего устройства 10 соединяют с контуром 3 постоянного напряжения после выбранного коммутирующего перехода коммутирующих состояний силовых полупроводниковых реле 9 схемы 2 преобразователя.
На фиг.2 с изображены три коммутирующие последовательности 20,22, 24. На фиг.2а и 2b изображены соответствующие им траектории 26, 28, 30 крутящего момента и траектории 32, 34, 36 потока статора, расположенные между соответствующими верхними и нижними пределами. Временная ось на трех диаграммах задается с помощью тактов считывания или дискретных временных тактов, где интервал считывания, т.е. время между, например, k и k+1, может составлять ts=25 µs. Текущим моментом считывания при этом является k.
На фиг.2 с изображены коммутирующие последовательности 20, 24, 26 сгенерированные с горизонтом коммутации, который имеет элементы «SSESE» и описывает переключение на временных тактах k и k+1 и затем увеличение траекторий выходных величин до тех пор, пока одна или несколько траекторий не становятся недопустимыми. Например, это. может произойти на временном такте k+j (например, k+5 для коммутирующей последовательности 20). В этот момент времени происходит третье коммутирующее событие, и за ним следует дополнительный такт увеличения.
На фиг.3 показан пример дерева 38 поиска, с помощью которого сгенерирован итерационный алгоритм MPDTC с увеличенным горизонтом коммутации «SSESE». Дерево 38 поиска имеет узлы 40 коммутации, соответствующие коммутирующим элементам горизонта, в которых происходит ветвление на все допустимые коммутирующие переходы, и узлы 42 прерывания, соответствующие элементам прерывания горизонта, которые расширяют траектории выходных величин, пока не достигнут предела.
Также дерево 38 поиска имеет узлы 43 отклонения, принадлежащие коммутирующим последовательностям, которые были отклонены, и обозначенные перевернутой буквой Т. Дискретная ось времени показана на левой стороне и простирается от k до k+N, где N - длина горизонта самой длинной коммутирующей последовательности.
На фиг.4 показана блок-схема итерационного алгоритма MPDTC, который, например, может генерировать дерево 38 поиска. На временном такте k алгоритм MPDTC вычисляет коммутирующую последовательность U=[u(k), u(k+1),…, u(k+N-1)] следующим образом:
на этапе S10 инициализируют корневые узлы дерева с помощью текущего вектора x(k) состояния привода, предыдущего коммутирующего положения u(k-1) и обобщенного горизонта коммутации. Помещают корневые узлы в стековую память.
Вектор х(к) состояния может содержать, например, компоненты тока или потока статора и ротора машины или их комбинацию. Кроме того, вектор x(k) состояния может содержать состояния преобразователя частоты, например, потенциал напряжения на средней точке или на средних точках промежуточного контура.
На этапе S12 выбирают из стека самый верхний узел с непустым горизонтом коммутации.
На этапе S14 считывают первый элемент горизонта коммутации. В случае «S» разветвляются на все допустимые коммутирующие переходы. Допустимые коммутирующие переходы при этом являются коммутирующими переходами, допустимыми для топологии преобразователя частоты, например, не повреждающие или не перегружающие преобразователь частоты. Допустимые коммутирующие переходы могут быть сохранены в справочной таблице и вычисляться в автономном режиме.
В случае «Е» на этапе S 14 расширить траектории выходных величин путем экстраполяции, интерполяции и/или применяя внутреннюю модель привода. При этом используют и актуализируют с помощью вычисленных выходных величин вектор x(k) состояния.
На этапе S16 отклоняют невозможные и сохраняют только возможные коммутирующие последовательности. Например, коммутирующие последовательности не являются возможными, если после коммутирующего перехода одна или несколько выходных величин нарушают свои пределы.
На этапе S18 кладут возможные коммутирующие последовательности в стек и переходят к этапу S12, если в стеке еще остались узлы. Если в стеке больше нет узлов, включающих в себя непустые, горизонты коммутации, то вычисление останавливают. Результатом этих вычислений являются возможные коммутирующие последовательности Ui(k)=[ui(k),…,ui(k+ni-1)] переменной длины, где i выбирается из I, где I является множеством индексов.
На этапе S20 для каждой возможной коммутирующей последовательности i в I вычисляют соответствующий коэффициент добротности. Если необходимо минимизировать частоту коммутации, рассматривают, например, ci=si/ni, приближающееся к средней частоте коммутации, где si=Σj=kk+ni-1||ui(j)-ui(j-1)||1 является суммарным количеством коммутирующих переходов в коммутирующей последовательности Ui(k), a ni - соответствующей длиной коммутирующей последовательности.
Когда на этапе S20 вычисляют коэффициент добротности с помощью потерь на коммутацию, используют функцию добротности ci=Ei/ni, где Ei - потери на коммутацию. Для вычисления потерь на коммутацию может понадобиться вычислять фазовые токи, являющиеся линейными комбинациями потоковых компонентов.
На этапе S22 выбирают оптимальную коммутирующую последовательность U*=Ui(k) с минимальным коэффициентом добротности, причем i=arg min ci.
На этапе S24 прилагают первый коммутирующий переход u(k)=u* оптимальной коммутирующей последовательности U* к коммутирующим элементам преобразователя частоты и на следующем временном такте k+1 (т.е. в следующем цикле управления) выполняют вышеописанный способ.
Алгоритм устроен так, что каждая возможная коммутирующая последовательность выдает траектории выходных величин, которые являются допустимыми. Он пытается удостовериться в том, что в любой момент времени в ходе стационарной работы соблюдаются пределы выходных величин. Кроме того, алгоритм выполняется итерационно, т.е. вместо того, чтобы сначала перечислять коммутирующие последовательности, а затем вычислять соответствующие траектории выходных величин, посредством ветвления на допустимых коммутирующих переходах 40 пошагово строятся коммутирующие последовательности. Преимущество состоит в том, что горизонт коммутации можно легко расширить так, чтобы можно было учитывать множество коммутирующих переходов 40 и множество узлов 42 прерывания. Кроме того, можно применять методики поиска по дереву с тем, чтобы сократить вычислительную нагрузку.
Согласно фиг.3 алгоритм стартует с корневых узлов и просматривает дерево 38 поиска с узлами 40, которые, в свою очередь, представляют собой корневой узел для поддерева, в котором каждый узел отображает допустимый коммутирующий переход, и узлы 42 прерывания, которые обозначают шаги увеличения и имеют только один дочерний узел. Глубина дерева 38 - это количество имеющихся коммутирующих переходов плюс количество шагов прерывания на узел 42 прерывания внутри горизонта коммутации. Алгоритм перечисляет все доступные коммутирующие последовательности, которые являются возможными, и вычисляет траектории соответствующих им выходных величин и их коэффициенты добротности. Таким образом проходят все узлы 40 в дереве поиска, которые принадлежат возможным коммутирующим последовательностям.
Вышеописанный алгоритм можно модифицировать для повышения эффективности вычислений так, чтобы на имеющихся современных аппаратных средствах можно было бы рассчитывать более длинные горизонты. Этого можно достичь, например, с помощью следующих методик:
- быстрые и точные способы для увеличения траекторий крутящего момента, потока статора, потенциала средней точки (промежуточного контура) для заданной комбинации коммутирующих состояний до тех пор, пока одна из траекторий не достигнет соответствующего предела гистерезиса (или общего заданного предела). При этом ставится цель сократить среднее время вычислений.
- индивидуальные технологии оптимизации для сокращения количества просматриваемых в дереве поиска узлов. При этом ставится цель сократить среднее время вычислений.
- субоптимальный способ MPDTC, при котором максимальное количество шагов итерации (или время) ограничены, однако обеспечивается нахождение допустимого решения (коммутирующего перехода), которое однако может оказаться субоптимальным. Этот принцип ограничивает максимальное время вычислений, что может быть важно, прежде всего, для реализации алгоритма.
Из фиг.5 и 6 следует, как на этапе S14 с помощью интерполяции, экстраполяции или других приближений можно определить траектории выходных величин или момент времени, когда траектория переходит предел.
Вместо возможно неточных экстраполяции и моделирования с применением модели привода, требующего большого времени вычислений, можно аналитически прогнозировать количество временных тактов, на которых можно применять данную комбинацию коммутирующих состояний до тех пор, пока одна из выходных величин (крутящий момент, поток статора, потенциал(-ы) средней точки) достигнет предела, причем можно использовать простой способ оптимизации нахождения нулевых значений.
На фиг.5 на плоскости α/β показан вектор ψs потока статора и вектор ψг потока ротора. Вектор ψs потока статора движется с помощью вектора v напряжения, который является функцией комбинации и коммутирующих состояний. При этом вектор ψs потока статора должен оставаться внутри внутреннего предела 44 гистерезиса и внешнего предела 46 гистерезиса.
Пренебрегая сопротивлением статора, можно получить приближение траектории потока статора, начинающейся в момент времени 0, с помощью простого отношения вида
ψs(t)=ψs(0)+tv,
где вектор ψs потока статора задан в α/β, v - вектор напряжения в α/β, t - непрерывное время, а коэффициенты масштабирования опущены.
Возведение этого отношения в квадрат и приравнивание к внутреннему пределу 44 гистерезиса (радиусу внутреннего контура) дает полином второго порядка в момент времени t. Независимо от положения вектора ψs потока статора относительно пределов 44, 46 гистерезиса и направления вектора v напряжения этот полином не имеет решений, имеет одно или два решения, которые легко вычисляются. То же справедливо для аналогичного отношения для точек пересечения с внешним пределом 46 гистерезиса, которое либо не имеет решений, либо имеет два решения.
Время t, после которого вектор ψs потока статора пересекает один из пределов 44, 46 гистерезиса, задается наименьшим неотрицательным временем t, которое вычисляется, как описано выше. На основании этого времени можно определить дискретную единицу времени или временной такт k, который находится ближе всего к времени t.
Также в вышеописанном вычислении разными способами можно учесть опущенное сопротивление потока статора:
- путем поворота вектора v напряжения на соответствующий угол в направлении начала плоскости α/β;
- путем использования уравнения потока статора для модели машины; Когда начинают в момент времени 0, в частности, вектор ψs потока статора можно вычислить после короткого временного интервала для данного вектора v напряжения в α/β с применением модели машины (для этого требуются только первые два уравнения). Основываясь на этом, можно корректировать длину и ориентацию вектора v напряжения, чтобы тем самым учитывать сопротивление статора.
Эти корректировки могут вычисляться для всех векторов v напряжения и всех установок крутящего момента и скорости перед выполнением алгоритма, например, в автономном режиме. Такая информация может быть сохранена, например, в справочной таблице, к которой может обращаться алгоритм.
Таким способом также можно определить траекторию крутящего момента или ее пересечение со своими пределами. Крутящий момент является векторным произведением вектора ψs потока статора и вектора ψr потока ротора. Принимая, что внутри прогнозируемого горизонта длина вектора ψs потока статора постоянна, и что поворот вектора ψs потока статора происходит с постоянной скоростью, в уравнение крутящего момента можно подставлять вышеописанное разложение потока статора. Упрощение уравнения приводит к разложению крутящего момента как функции компонентов потока на момент времени 0 и членов t sin(wrt) и t cos(wrt), где wr является угловой скоростью вектора ψs потока статора.
Приравнивание уравнения крутящего момента к нижнему и верхнему пределу крутящего момента и получение минимального неотрицательного времени дает время, после которого достигается или пересекается первый предел. Уравнение крутящего момента может быть решено различными способами. Вышеописанные вычисления могут, например, проводиться аналитически.
Другая возможность решить уравнение крутящего момента состоит в аппроксимации членов t sin(wrt) и t cos(wrt) с помощью ряда Тейлора в момент времени t=0 или t>0. Кроме того, можно выполнить итерацию по t или на основании уже имеющейся информации об ожидаемом достижении предела, задавать t.
Кроме того, с помощью кусочно-полиномиальной функции можно аппроксимировать члены t sin(wrt) и tcos(wrt) и в каждом интервале аппроксимации решать уравнение крутящего момента.
Другая возможность решить уравнение крутящего момента состоит в том, чтобы применить алгоритм определения нулевых значений, например, метод Ньютона, секущих и/или линейной интерполяции. Этот алгоритм можно прервать, как только определен момент t времени, при котором траектория потока статора пересекает один из своих пределов.
Алгоритм описывается на основании фиг.6.
На этапе S100 находят ближайший максимум или минимум крутящего момента для t>0 с применением алгоритма определения нулевых значений посредством приравнивания производной 0.
На этапе S102 определяют, лежит ли максимум или минимум внутри пределов крутящего момента. Если да, то перейти к этапу S100. Если нет, то перейти к этапу S103.
На этапе S103 определяют предел, который пересекается, т.е. верхний или нижний предел крутящего момента и определяют время, за которое достигается предел, с применением алгоритма нахождения нулевых значений.
Момент времени, в который потенциал средней точки достигает одного из своих пределов, может быть вычислен каждым из вышеописанных способов. Они включают экстраполяцию или аналитическое решение, подобное вышеописанному решению уравнения крутящего момента.
В отличие от вышеописанного способа аналитического определения траекторий выходных величин и моментов времени, когда эти траектории пересекают верхний или нижний предел, далее представлен способ, основывающийся на модели (возможно математической) привода с применением грубого интервала считывания и квадратичной интерполяции. Способ описан со ссылками на фиг.7 и 8.
На фиг.7 показана траектория 48 выходной величины, которая построена на временной оси к и вычислена для значений на грубых временных тактах Ts=d*ts, где ts - интервал считывания управляющего устройства, т.е. наименьший временной интервал или временной такт, который может считать управляющее устройство, например, 25 µs или интервал цикла управления. Грубый интервал считывания Ts=d*ts можно выбрать, выбирая d равным, например, 10. Таким образом, грубый интервал считывания кратен интервалу считывания управляющего устройства.
Как видно из фигуры, от k=0 до k=27 траектория 48 проходит внутри нижнего и верхнего пределов 44, 46 гистерезиса и пересекает нижний предел гистерезиса приблизительно при k=27.
Описанный далее со ссылкой на фиг.8 алгоритм определения точки 50 пересечения траектории 48 с одним из пределов 44, 46 основывается на том, что сохраненная в управляющем устройстве дискретная по времени модель привода использует в качестве шага дискретизации грубый интервал считывания Ts, а не интервал считывания управляющего устройства.
Начинают на этапе S200 при k=0 и рассчитывают или моделируют выходные величины при k=d и k=2d, применяя модель привода.
На этапе S202 выводят для каждой выходной величины квадратичное приближение соответствующей траектории 48 выходной величины на основании точек при k=0, d, 2d. На основании кривизны квадратичного приближения и того, лежат ли точки при k=0, d, 2d внутри, выше или ниже пределов 44, 46 гистерезиса, определяют, какой предел является кандидатом на пересечение траекторией выходной величины.
На этапе S204 рассчитывают точку пересечения квадратичного приближения с определенным в качестве кандидата пределом. Если существует точка пересечения, аналитически рассчитывают момент времени пересечения. Если этот момент времени находится между k=0 и k=2d, алгоритм останавливают. В качестве вычисляемого момента времени берут определенное минимальное время всех выходных величин, для которых производились расчеты. Если никакая из выходных величин не пересекает предел внутри диапазона k=0 и k=2d, перемещаются вперед на грубый интервал считывания Ts и рассчитывают выходные величины на временном такте k=3d. Повторяют этап S202, но со сдвигом на d.
Исходя из ситуации на фиг.7, алгоритм выполняют следующим образом. На первом этапе, когда рассматривают интервал 52 на основании точек k=1, d, 2d, исследуют точку пересечения с верхним пределом гистерезиса, но не обнаруживают точку пересечения. На втором этапе, когда рассматривают интервал 54 на основании точек k=d, 2d, 3d, определяют точку 50 пересечения с нижним пределом 44 гистерезиса и момент времени k=27.
d можно выбрать таким образом, что длина интервала, т.е. 2d лежит в области среднего количества временных тактов увеличения, т.е. средней длины перерывов коммутации. Такие данные можно вычислить также с помощью моделирования в автономном режиме и сохранить их в справочной таблице.
Вместо того чтобы определять выходные величины в моменты времени 0, d, 2d и применять квадратичную интерполяцию, выходные величины и их производные можно вычислять в моменты времени 0 и 2d и использовать в квадратичной интерполяции.
Дополнительно или альтернативно можно применять линейные или кубические интерполяции на основании значений выходных величины при подходящим количестве временных тактов. Эти временные такты не обязательно должны быть распределены равномерно или через одинаковые интервалы. В частности, временной такт может быть установлен там, где ожидается, что траектория пересечет предел.
Вместо того чтобы определять все допустимые коммутирующие последовательности или возможные коммутирующие последовательности и сортировать их или назначать им приоритет, количество просматриваемых коммутирующих последовательностей можно ограничить или сократить, чтобы сократить среднее время вычислений.
На фиг.9 показана динамика коэффициента добротности для различной длины обобщенного горизонта коммутации «eSSESE». На диаграмме, представленной на фиг.9, вправо откладывается время во временных тактах, а вверх - добротность. Это разложение получено в процессе осуществления алгоритма поиска методом «ветвей и границ», который будет описан более подробно ниже. Полные коммутирующие последовательности 58 проверены полностью, неполные коммутирующие последовательности 60 - не полностью и отброшены. Коммутирующие последовательности 62 еще не просмотрены полностью. Как видно из фигуры, в этом случае оптимальная на настоящий момент коммутирующая последовательность имеет длину в 39 временных циклов и коэффициент добротности приблизительно 0,01.
На основании фигуры можно сказать, что при увеличении коммутирующих последовательностей, коэффициенты добротности растут не монотонно. Несмотря на это при помощи следующих расчетов можно оценить коэффициент добротности неполных коммутирующих последовательностей.
Полная коммутирующая последовательность при этом представляет собой коммутирующую последовательность, которая включает все элементы обобщенного горизонта коммутации. В отличие от нее неполная коммутирующая последовательность представляет собой коммутирующую последовательность, которая становится полной коммутирующей последовательностью только путем присоединения элементов. Таким образом, неполная коммутирующая последовательность имеет, как правило, меньше элементов, чем обобщенный горизонт коммутации.
Коэффициент с добротности полной коммутирующей последовательности при этом можно вычислить так: Соответствующий коэффициент добротности коммутирующей последовательности является суммой потерь на коммутацию всех коммутирующих переходов, поделенной на общую длину n коммутирующей последовательности, т.е. c=sum(Eloss)/n. Так как горизонт коммутации может включать в себя коммутирующие переходы и элементы прерывания различной длины, n может иметь различную длину.
Минимальным на настоящий момент коэффициентом с* добротности является минимальный коэффициент с добротности, найденный в процессе выполнения алгоритма для полной коммутирующей последовательности.
Нижний предел clb коэффициентов добротности неполных коммутирующих последовательностей можно вычислить следующим образом: Так как коэффициент с добротности, как правило, является суммой потерь на коммутацию всех коммутирующих переходов, поделенной на общую длину коммутирующей последовательности, с возрастанием длины коммутирующей последовательности коэффициенты добротности растут не обязательно монотонно. Чтобы применить так называемый метод ветвей и границ, вводят нижний предел сlb, для коэффициента добротности, который справедлив также и для неполных коммутирующих последовательностей: clb=sum(Eloss)/Nmax, где Nmax - верхний предел максимальной длины коммутирующей последовательности. Тогда справедливо, что c≥clb.
Максимальную ожидаемую длину Nmax коммутирующих последовательностей в ходе алгоритма также можно обновлять. Алгоритм поиска работает эффективней, когда Nmax является ограниченным верхним пределом максимальной длины коммутирующей последовательности.
В ходе поиска по дереву Nmax можно обновлять разными способами. Далее приводится ряд подходов, которые можно также комбинировать:
Nmax можно определять с помощью автономного моделирования для каждой рабочей точки и каждого заданного горизонта коммутации и сохранять в справочной таблице.
Nmax можно передать в следующий цикл управления из предыдущего цикла управления. В ходе поиска по дереву Nmax можно увеличивать, когда найдена коммутирующая последовательность, имеющая более длинный горизонт коммутации. При этом N из предыдущего цикла управления можно масштабировать с фиксированным коэффициентом, например, с коэффициентом 0,9.
Также начальное значение Nmax для цикла управления может быть максимумом или средним значением Nmax для определенного числа предыдущих циклов управления.
В целом, во время поиска по дереву, когда увеличивают Nmax, может возникнуть необходимость просмотра ранее отклоненных (неполных) коммутирующих последовательностей и при необходимости обновить Clb.
Кроме того, для расчета нижнего предела Clb можно использовать релаксацию и приближения.
На фиг.10 изображен фрагмент алгоритма, схожего с алгоритмом из фиг.4. Однако этап S20 из фиг.10 заменен на этап S300, и добавлен этап S301, ветвление на этапе S18 теперь ведет не к этапу S12, а к этапу S301. При этом очередность этапов S300, S301, S12, S14, S16 может быть иной, чем представлено на фиг.10. На этапе S300 в ходе рекурсии или итерации отклоняют коммутирующие последовательности. На этапе S301 сортируют неотклоненные коммутирующие последовательности и/или назначают им приоритет. На этапе S12 выбирают коммутирующую последовательность с наивысшим приоритетом. Как правило, на этапе S300 можно оценить функцию добротности и отклонить коммутирующие последовательности, при которых с больше чем сlb. Также можно выполнить назначение приоритетов и сортировку, т.е. определить какую коммутирующую последовательность нужно рассматривать, в ходе этапа S12.
Алгоритм можно модифицировать разными способами:
Адаптированный алгоритм «ветвей и границ»: Итерационно вычисляют коммутирующие последовательности и соответствующие им траектории выходных величин (S14) и коэффициенты добротности (S300), когда дерево проходят от корневых узлов до листьев. На каждом шаге (S300) итерации вычисляют нижний предел clb коэффициента добротности текущей (возможно неполной) коммутирующей последовательности.
Когда нижний предел clb превышает минимальный коэффициент с* добротности (наилучшей до сих пор определенной полной коммутирующей последовательности), неполные коммутирующие последовательности не рассматривают и отклоняют. Алгоритм «поиска в глубину»: начинают с многообещающей коммутирующей последовательности (например, на этапе S301 всегда назначают приоритет для неполной коммутирующей последовательности, которая имеет такие же коммутирующие переходы, как и многообещающая коммутирующая последовательность) и вычисляют соответствующие траектории выходных величин и их коэффициент добротности. Целью является нахождение сразу в начале поиска по дереву (полной) коммутирующей последовательности, близкой к оптимальной коммутирующей последовательности и имеющей соответственно малый коэффициент добротности.
Алгоритм «теплого старта»: Многообещающие коммутирующие последовательности (хотя бы частично) можно определить перед началом выполнения алгоритма, например, на основании:
- оптимальной коммутирующей последовательности из предыдущего цикла управления, смещенной на один временной такт,
оптимальной коммутирующей последовательности, определенной для предыдущего цикла оптимизации, выполняемого с более коротким горизонтом коммутации. (Так как такая коммутирующая последовательность не является завершенной, это обеспечивает частичный «теплый старт» и, чтобы получить завершенную коммутирующую последовательность, требуется ветвление, начиная с конца не завершенной коммутирующей последовательности.)
- также можно определять первое коммутирующее положение коммутирующей последовательности с помощью ниже описанного метода геометрического анализа.
Алгоритмы эвристического ветвления: В своей базовой форме алгоритм ветвится по всем допустимым коммутирующим переходам и выбирает при этом наивысший узел в стеке. Чтобы еще сильнее сократить количество итераций, сначала просматривают наиболее многообещающие коммутирующие переходы (узлы) и соответствующим образом сортируют коммутирующие переходы для них. Сортировка или назначение приоритета на этапе S301 может выполняться с применением эвристического ветвления, которое, например, включает в себя:
Назначение приоритетов осуществляется на основании вероятности, с которой какая-либо коммутирующая последовательность приводит к допустимой и/или хорошей коммутирующей последовательности. Для исследуемого коммутирующего перехода вероятность можно определить в оперативном режиме или на основании справочной таблицы, вычисленной предварительно в автономном режиме: Для каждой рабочей точки и каждого сектора (вектора напряжений) на плоскости α/β с помощью моделирования стационарной работы определяют вероятность каждого коммутирующего перехода (вектора напряжений). Чтобы уменьшить потребность в памяти, задачу переносят в нулевой сектор и определяют распределение вероятности для нулевого сектора. Затем коммутирующие положения или коммутирующие последовательности сортируют в соответствии с понижением вероятности, и осуществляют ветвление сначала для коммутирующих последовательностей или коммутирующих положений, имеющих наибольшую вероятность. Обычно ширина сектора составляет 15, 30, 45 или 60°. Другими словами, с использованием свойств симметрии 3-фазных. систем задача отображается в пространстве меньшей размерности. Для такого пространства с помощью моделирования в автономном режиме можно вычислить вероятность, с которой используется каждое отдельное коммутирующие состояние или коммутирующий переход.
Альтернативно или дополнительно эти коммутирующие переходы и коммутирующие состояния можно сортировать также на основании геометрического анализа. Коммутирующие положения, поддерживающие постоянный крутящий момент, расположены на линии, параллельной потоку ротора, в то время как коммутирующие положения, обеспечивающее постоянство потока статора, расположена на линии, перпендикулярной потоку статора. На основании данного рассмотрения можно определить дискретные коммутирующие положения, повышающие или понижающие крутящий момент и/или потока статора. В зависимости от того, находится ли крутящий момент вблизи верхнего или нижнего предела и тем самым должен быть уменьшен или увеличен, можно выбрать дискретные коммутирующие положения, удовлетворяющие этим критериям, и назначить им приоритеты. Такой же расчет можно произвести для потока статора и потенциалов или потенциала средней точки. Идея заключается в том, чтобы рассчитать идеальное напряжение, которое сможет создавать постоянный крутящий момент и постоянный поток. Такое идеальное напряжение можно обеспечить только посредством бесконечно быстрого переключения, т.е. только в предельном значении. Идеальное напряжение можно перевести в идеальные коммутирующие состояния, которые, как правило, нецелочисленные, а поэтому и не коммутируемые, а действительные, например [0,9; -0,8; 0,1]. Однако коммутируемыми являются только [1; -1; 0]. Идеальное напряжение или идеальное коммутирующее состояние или коммутирующий переход может являться хорошим начальным значением, вблизи которого лежат приводящие к успеху коммутирующие состояния, например, [1; -1; 0]. Кроме того, на основании идеального напряжения определяют коммутирующие состояния или коммутирующие переходы, оказывающие желательное влияние на преобразователь частоты и машину, например, увеличивающие крутящий момент.
Только что сказанное можно осуществить для так называемых ослабленных коммутирующих положений или коммутирующих переходов, т.е. действительных коммутирующих переходов. После определения требуемых ослабленных коммутирующих положений также можно рассмотреть дискретные коммутирующие положения вблизи ослабленных коммутирующих положений.
Чтобы отсортировать коммутирующие последовательности и/или назначить им приоритеты (S3 01), можно сначала исследовать узлы с наилучшим на настоящий момент времени в ходе цикла управления коэффициентом (с или сlb) добротности.
Другой вариант назначения приоритетов коммутирующим последовательностям на этапе S3 01 описан со ссылками на фиг.11 и 12.
На фиг.11 показана гистограмма с множеством узлов на каждом уровне дерева поиска для обобщенного горизонта коммутации «eSSESE». На гистограмме вверх откладывается количество узлов, а вправо глубина или уровни дерева поиска. Как видно из диаграммы, глубину дерева поиска можно определить с помощью оставшихся требуемых операций из обобщенного горизонта коммутации (например, «ESE»).
Назначение приоритетов узлам дерева поиска и коммутирующим последовательностям можно выполнять так, чтобы гистограмма образовывала определенную форму. Это позволяет согласовывать распределение не просмотренных узлов или неполных коммутирующих последовательностей в дереве поиска. Вместо того, чтобы всегда выбирать узел с наименьшим коэффициентом добротности (который обычно расположен на верхнем уровне дерева поиска, т.е. слева на гистограмме), может быть предпочтительно быстро вычислять полные коммутирующие последовательности, чтобы быстро получить нижние оптимальные коэффициенты добротности (хорошие пределы) и тем самым сосредоточиться на нижних уровнях дерева поиска.
В соответствии с фиг.11 линия 66 представляет собой желательную гистограмму, а линия 64 - реально существующую гистограмму, полученную в результате выполнения части алгоритма. В этом примере выбирают узел второго уровня (на котором еще требуется выполнить операции «SESE»). При этом может быть выбран, в частности, узел с наименьшим коэффициентом добротности.
Это можно осуществить с помощью следующих модификаций алгоритма из фиг.10:
На этапе S3 01 дополнительно определяют количество узлов на каждом уровне дерева поиска. Это приводит, например, к гистограмме на фиг.11. Принимают решение о желательной форме гистограммы, например, экспоненциальной функции от глубины дерева поиска. Такая форма также может быть задана заранее.
На этапе S301 выбирают уровень, наиболее сильно нарушающий желательную форму гистограммы. Для этого уровня выбирают, например (неполную коммутирующую последовательность) с наименьшим коэффициентом добротности и назначают ей приоритет.
Большинство описанных выше вариантов осуществления способствуют сокращению времени вычислений. Однако может быть столь же важно ограничить максимальное время вычислений.
Этого можно добиться тем, что максимальное количество этапов вычисления или время вычисления ограничивают, что допускают субоптимальные решения задачи MPDTC, однако всегда обеспечивают нахождение хорошей (возможной) коммутирующей последовательности.
Как уже описано, возможная коммутирующая последовательность приводит к допустимым траекториям выходных величин, т.е. лежащим внутри определенных пределов или указывающих в правильном направлении.
На фиг.12 показана характеристика коэффициентов добротности (здесь на основании потерь на коммутацию) для количества итераций во время поиска по дереву. На диаграмме вправо отложено количество итераций, а вверх - потери на коммутацию в киловаттах.
Из диаграммы видно, что оптимальный коэффициент добротности быстро найден. В данном случае после 25% от общего количества итераций. Большинство итераций (здесь 75%) используют только для того, чтобы подтвердить оптимальность решения. Оптимальный же первый элемент коммутирующей последовательности, т.е. следующий оптимальный коммутирующий переход найден раньше (в ходе 25% от общего числа итераций).
Поэтому может быть целесообразным осуществление субоптимального способа MPDTC. Чтобы выполнить субоптимальный алгоритм или способ MPDTC, могут быть произведены следующие модификации описанных выше алгоритмов MPDTC.
На этапе S18 из фиг.4 и 10 можно ввести альтернативное или дополнительное условие выхода из рекурсии:
- вводят верхний предел количества коммутирующих последовательностей или просматриваемых узлов и/или верхний предел доступного времени вычислений. Алгоритм останавливают, когда превышено это количество или время. Определенную до выхода оптимальную коммутирующую последовательность используют как (субоптимальное) решение.
- альтернативно оптимизированный алгоритм можно выполнять так долго, пока не наступит прерывание, останавливающее поиск по дереву. Прерывание может остановить поиск по дереву в любое время. Это позволяет не допускать бездействия процессора и вместо этого использовать данное время на улучшение текущего оптимального решения.
- также можно останавливать алгоритм, когда гарантирована близость к оптимальному решению. При этом задают приемлемый запас оптимальности, который может составлять 2% от функции добротности. Поиск по дереву останавливают тогда, когда определена полная коммутирующая последовательность, находящаяся в пределах 2% от наилучшего сlb, причем clb является нижней границей добротности неполных коммутирующих последовательностей.
Кроме того, дополнительно можно гарантировать, что всегда будет найдена допустимая хорошая коммутирующая последовательность, первое коммутирующее состояние или первый коммутирующий переход которой допустим, которая обеспечивает стабильный режим работы привода (т.е. траектории выходных величин которой перемещаются внутри пределов или к ним) и/или которая обеспечивает хорошую производительность машины и преобразователя частоты (прогнозируемая добротность мала). Этого можно добиться разными способами:
- алгоритм «теплого старта» в комбинации с алгоритмом поиска «в глубину», как описано выше, удовлетворяет требованию быстрого нахождения на общем горизонте коммутации решения (коммутирующей последовательности), близкого к оптимальной коммутирующей последовательности.
- также в ходе одного цикла управления можно выполнять алгоритм с двумя горизонтами коммутации различной длины. На предварительном этапе алгоритм коммутации выполняют с коротким горизонтом коммутации и вычисляют оптимальную или субоптимальную коммутирующую последовательность для этого короткого горизонта коммутации. Эту коммутирующую последовательность можно затем использовать для осуществления основного этапа оптимизированного способа с помощью, например, «теплого старта».
Кроме того, как уже описано, можно сократить пространство поиска, удаляя не многообещающие коммутирующие переходы (узлы) из дерева поиска. Это можно осуществить, например, на основе геометрического анализа, как описано выше.
Нужно понимать, что различные вышеописанные варианты осуществления способов и алгоритмов можно комбинировать даже в тех случаях, когда это не упомянуто в явной форме.
Способы и алгоритмы могут быть реализованы в виде программных модулей. Однако не исключено, что способы и алгоритмы, по меньшей мере, частично реализованы аппаратно.
В дополнение следует обратить внимание на то, что словосочетание «включающий в себя» не исключает другие элементы или этапы, а слова «одна», «одно», «один» не исключает множества. Кроме того, следует указать, что признаки или этапы, упомянутые со ссылкой на один из вышеописанных примеров осуществления, также могут использоваться в комбинации с другими признаками или этапами других вышеописанных примеров осуществления. Ссылочные обозначения в формуле изобретения не следует рассматривать как ограничение.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 вращающаяся электрическая машина
2 схема частотного преобразователя частоты для коммутации трех уровней напряжения
3 контур постоянного напряжения
4 устройство делительного преобразователя частоты
5, 6, 7 первая, вторая, третья коммутирующая группа, коммутирующий элемент
9 силовое полупроводниковое реле
10 управляющее устройство
12 линия управления
14 линия сигнала измерительного устройства
16 процессор
20,22,24 возможные коммутирующие последовательности
26, 28, 30 траектории крутящего момента
32, 34, 36 траектории потока статора
38 дерево поиска
40 узел коммутации
42 узел прерывания
43 узел отклонения
ψs вектор потока статора
ψr вектор потока ротора
v вектор напряжения
44 внутренний/нижний предел гистерезиса
46 внешний/верхний предел гистерезиса
48 траектория
ts наименьший интервал считывания
Тs грубый интервал считывания
50 точка пересечения
52,54 интервал
58, 60, 62 коэффициенты добротности коммутирующих последовательностей
64, 66 число просматриваемых или просмотренных узлов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОРОМ | 2011 |
|
RU2578165C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2464699C2 |
| КОРРЕКЦИЯ СМЕЩЕНИЯ МАГНИТНОГО ПОТОКА ДЛЯ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2566499C2 |
| УПРАВЛЕНИЕ И/ИЛИ РЕГУЛИРОВАНИЕ ТРЕХФАЗНОГО ПРЕОБРАЗОВАТЕЛЯ ЭЛЕКТРОЭНЕРГИИ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АСИНХРОННОЙ МАШИНЫ | 2007 |
|
RU2455751C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| Автономный инвертор напряжения | 1987 |
|
SU1495958A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2551420C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2007 |
|
RU2341002C1 |
| ПРОГНОЗНОЕ УПРАВЛЕНИЕ НА ОСНОВЕ АДАПТИВНОЙ МОДЕЛИ ДЛЯ ПЛАНИРОВАНИЯ МАРШРУТА АВТОМОБИЛЯ | 2015 |
|
RU2701620C2 |
| СПОСОБ ПАРАРЕЗОНАНСНОГО УПРАВЛЕНИЯ ИНВЕРТОРОМ ТОКА | 2003 |
|
RU2242836C1 |
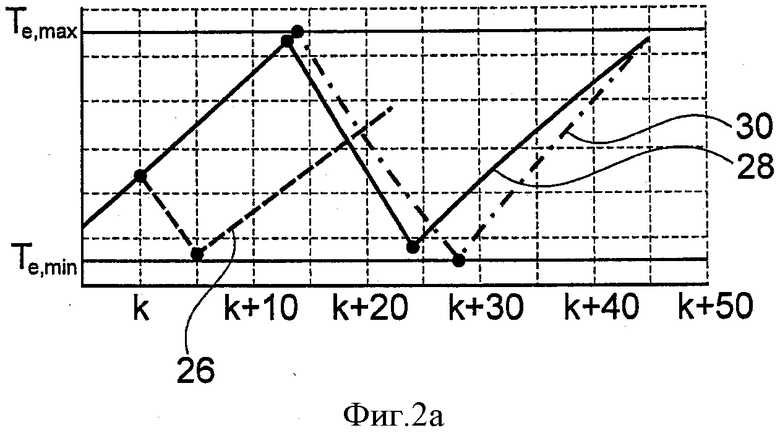
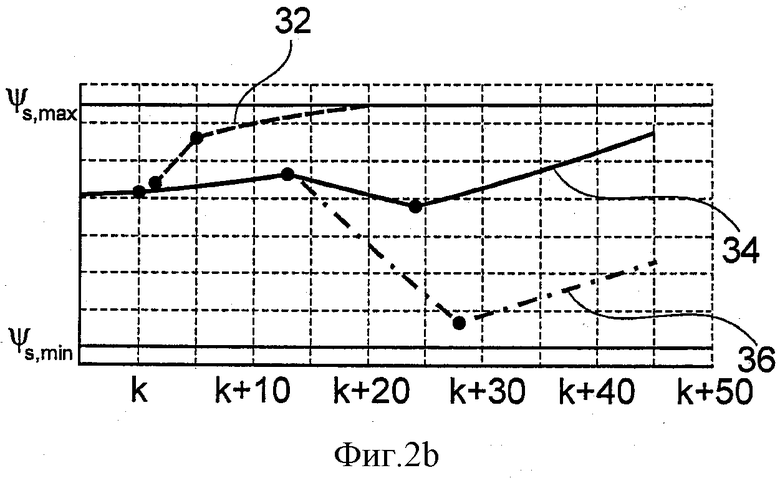
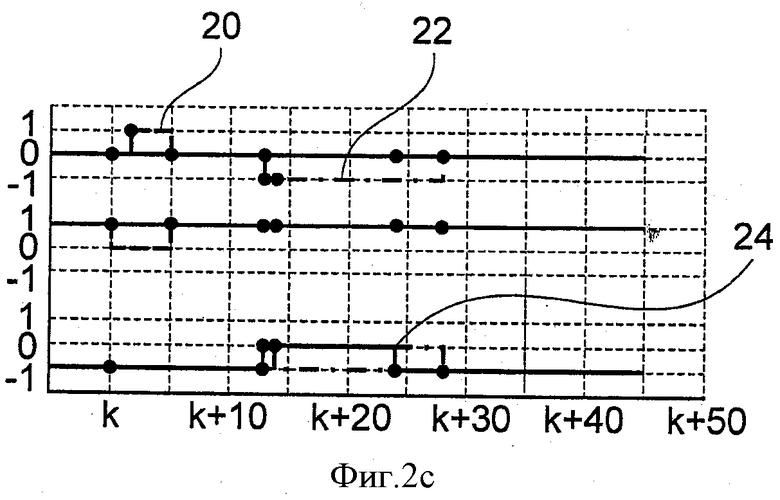
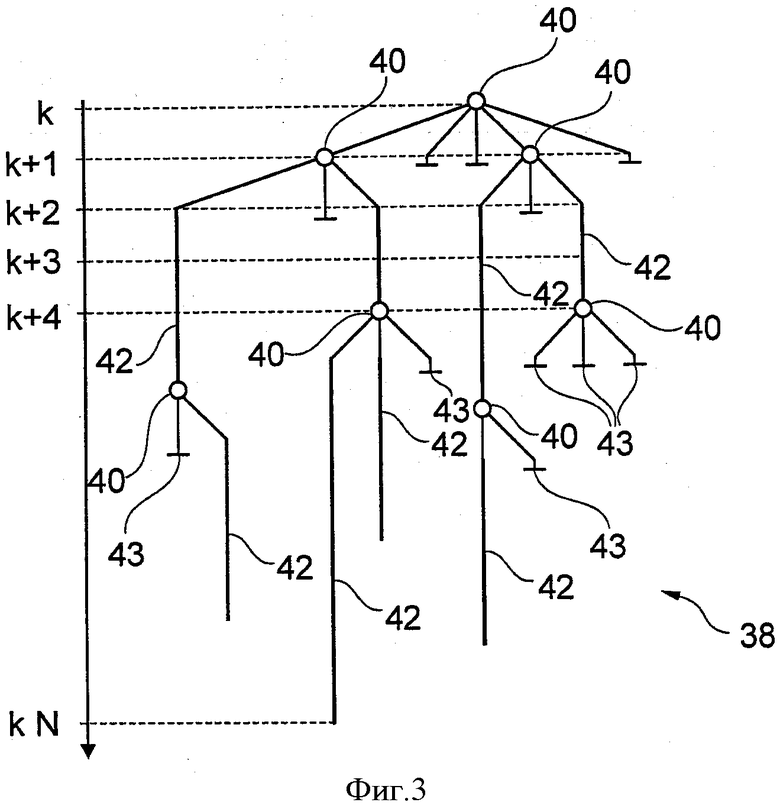
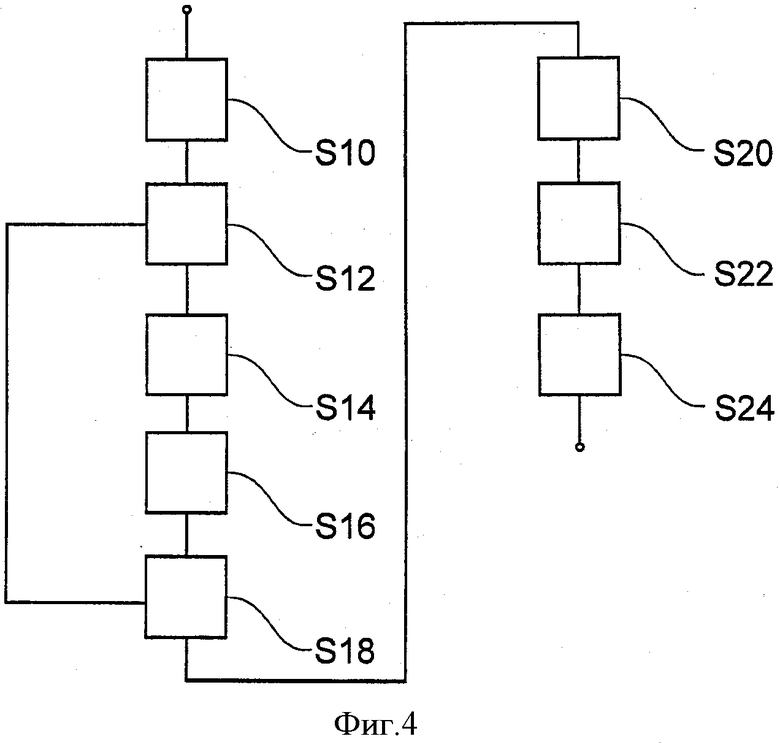
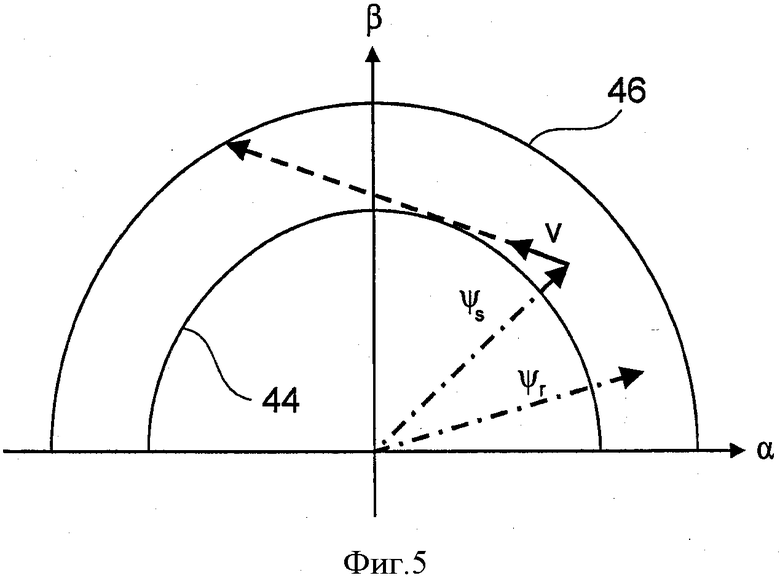
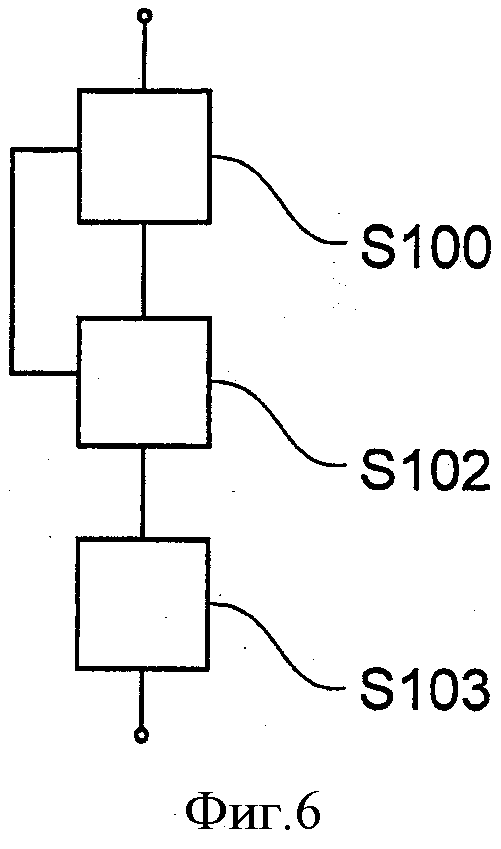
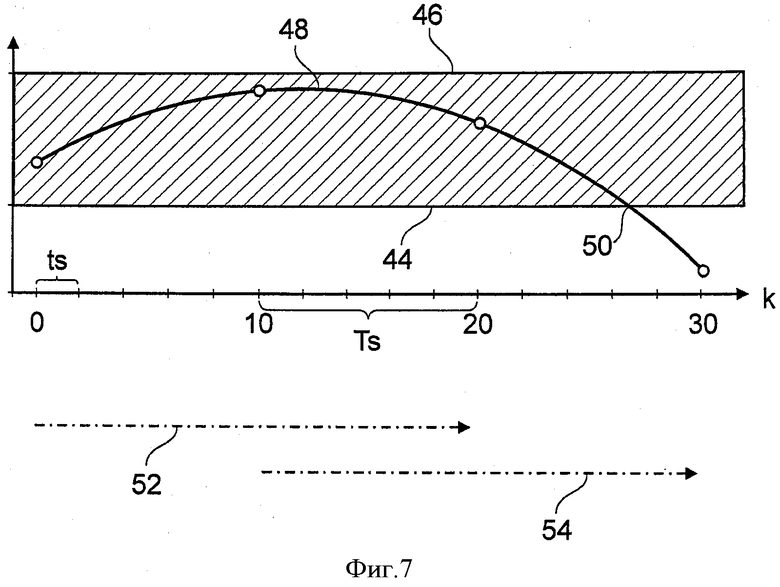
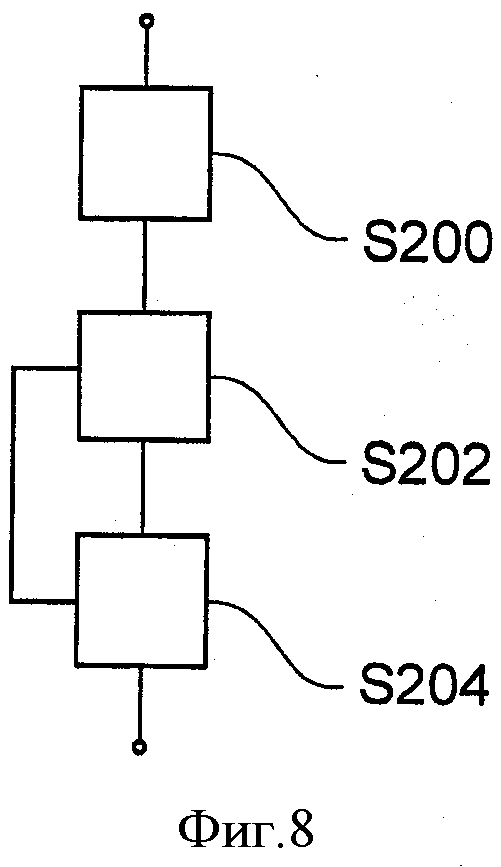
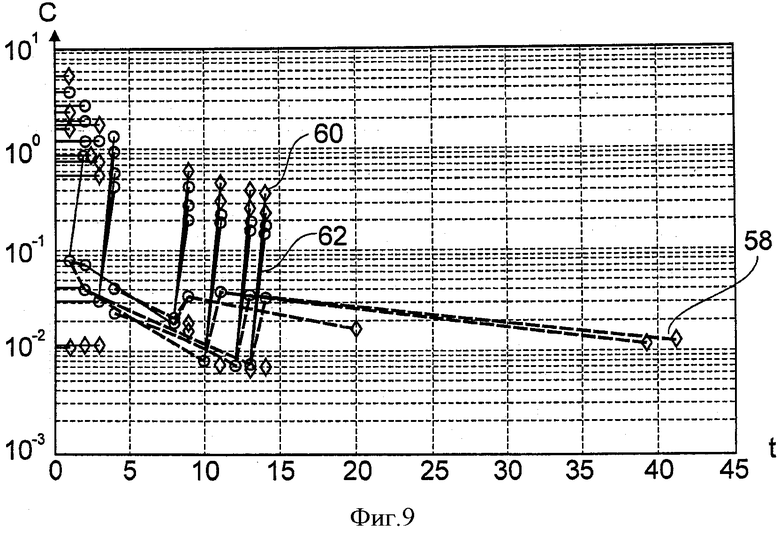
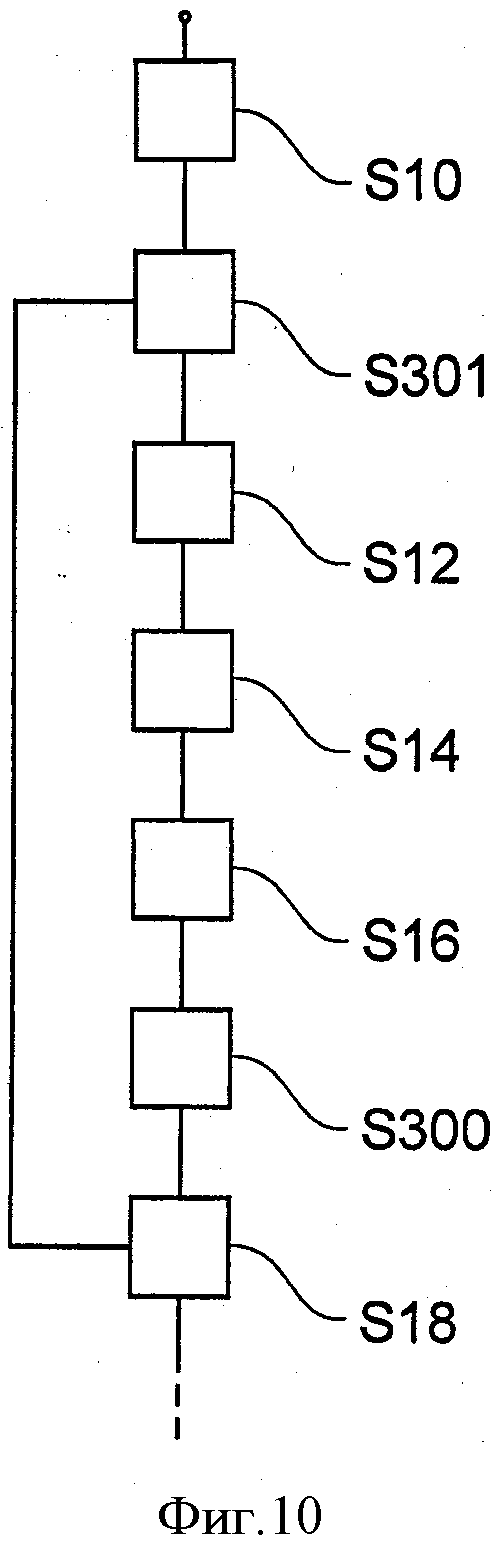
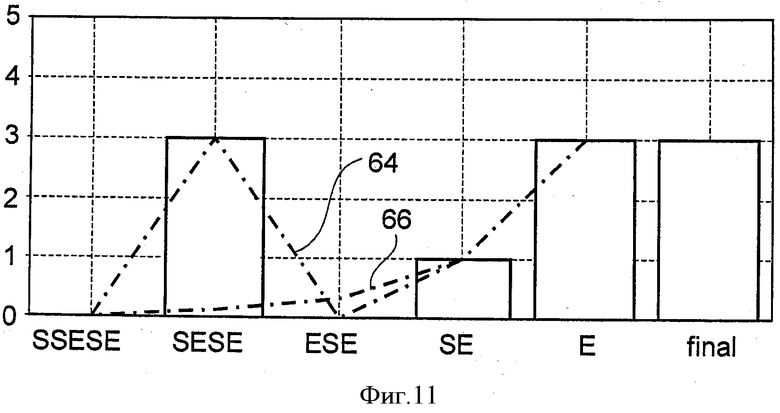
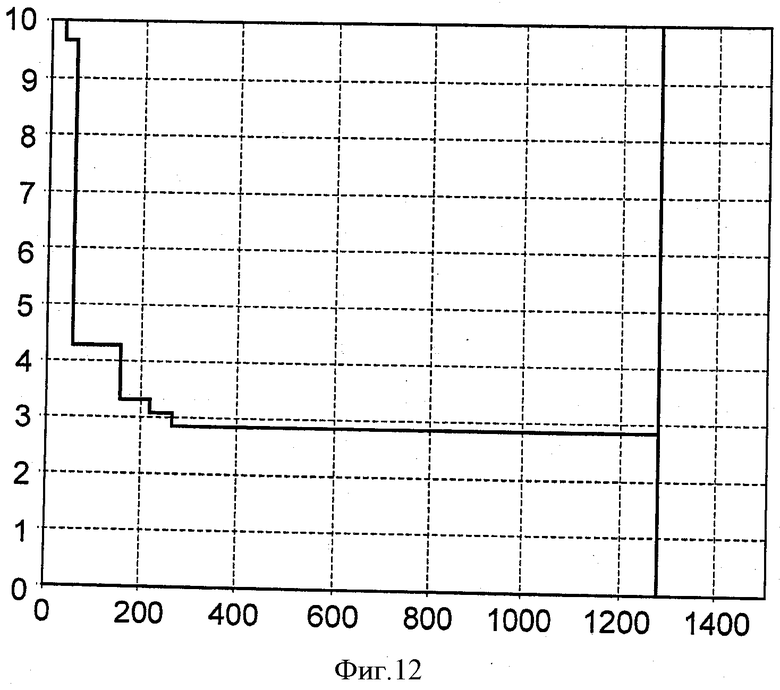
Изобретение относится к области электротехники и может быть использовано в для управления преобразователем частоты в системе двигателя. Технический результат - уменьшение потерь при коммутации. В способе управления вращающейся электрической машиной, чтобы минимизировать потери при коммутации во вращающейся электрической машине, представлен итерационный способ управления, заранее вычисляющий оптимальные коммутирующие состояния. 5 н. и 16 з.п. ф-лы, 14 ил.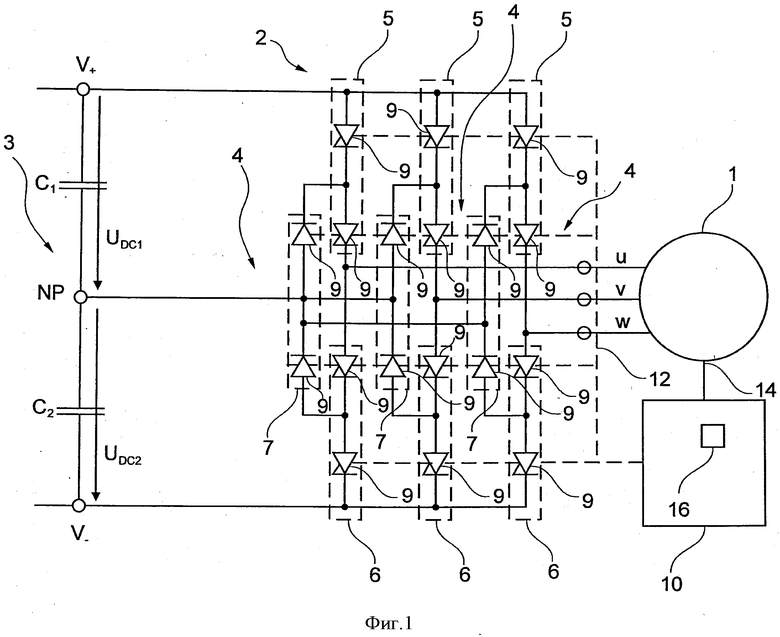
1. Способ управления вращающейся электрической машиной (1), которая питается электрическим током от преобразователя (2) частоты из коммутируемой схемы постоянного напряжения через, по меньшей мере, одну фазу (u, v, w), и преобразователь частоты предназначен для подключения, по меньшей мере, одной фазы к, по меньшей мере, двум уровням напряжения, включающий в себя следующие этапы:
- генерацию коммутирующих последовательностей, причем каждая коммутирующая последовательность включает в себя последовательность коммутирующих переходов преобразователя частоты с первым коммутирующим переходом;
- оценку каждой коммутирующей последовательности с помощью коэффициента добротности (S20);
- выбор коммутирующей последовательности с минимальным коэффициентом добротности (S22);
- управление коммутирующими элементами преобразователя частоты с первым коммутирующим переходом выбранной коммутирующей последовательности как выбранным коммутирующим переходом так, что, по меньшей мере, одну фазу подключают к соответствующему коммутирующему переходу уровню напряжения; при этом коммутирующие последовательности генерируют следующим образом:
(a) из более короткой коммутирующей последовательности генерируют более длинную коммутирующую последовательность, причем к более короткой коммутирующей последовательности подключают (S14), по меньшей мере, один возможный коммутирующий переход и первую коммутирующую последовательность инициализируют (S10) с помощью предыдущего выбранного коммутирующего перехода;
(b) вычисляют выходные величины электрической машины для более длинной коммутирующей последовательности на основании коммутирующих переходов более длинной коммутирующей последовательности (S14);
(c) отклоняют более длинную коммутирующую последовательность, если вычисленные выходные величины лежат не внутри заданных границ и/или со временем удаляются от заданной границы (S16);
- итерационную генерацию следующих коммутирующих последовательностей из неотвергнутой коммутирующей последовательности в соответствии с этапами (а) - (с) (S12-S18).
2. Способ по п. 1, в котором коэффициент добротности основывается на ожидаемых потерях преобразователя частоты при коммутации или ожидаемой частоте коммутации преобразователя частоты для соответствующей коммутирующей последовательности.
3. Способ по п. 1 или 2, в котором коммутирующие последовательности в цепочке коммутирующих переходов содержат элементы прерывания, причем элемент прерывания определяет перерыв коммутации после коммутирующего перехода; а перерыв коммутации определяют с помощью выходных величин; при этом вычисление выходных величин основывается на математической модели вращающейся электрической машины или аппроксимации.
4. Способ по п. 3, который включает в себя также: генерацию коммутирующей последовательности из коммутирующих переходов и элементов прерывания на основании обобщенного горизонта коммутации, который определяет, в какой очередности к коммутирующей последовательности присоединяют коммутирующие переходы и элементы прерывания.
5. Способ по п. 1, в котором при вычислении выходных величин определяют, к какому моменту времени в будущем траектория выходной величины достигнет верхнего или нижнего заданного предела.
6. Способ по п. 5, в котором момент времени определяют аналитически, с применением метода оптимизации для вычисления нулевых значений, с помощью аппроксимации тригонометрической функции посредством рядов Тейлора и/или с помощью аппроксимации тригонометрической функции посредством кусочно-полиномиальных функций.
7. Способ по п. 5 или 6, в котором при определении момента времени учитывают сопротивление потока статора.
8. Способ по п. 1, в котором вычисление траекторий выходных величин основано на математической модели вращающейся машины и интерполяции, причем выходные величины интерполируют через временной интервал, который включает в себя заданное количество дискретных временных тактов, при этом в интервале с помощью математической модели вычисляют выходные величины для, по меньшей мере, трех временных моментов.
9. Способ по п. 1, который включает в себя также: вычисление коэффициента добротности коммутирующей последовательности длиной n во время итерации.
10. Способ по любому из пп. 1, 2, 4 - 6, 8, 9, который включает в себя также:
- вычисление нижнего предела коэффициента добротности, базирующегося на уже вычисленных коэффициентах добротности полных коммутирующих последовательностей;
- отклонение коммутирующих последовательностей, коэффициент добротности которых превышает нижний предел коэффициентов добротности.
11. Способ по п. 10, который включает в себя также: вычисление коэффициента добротности с применением верхнего предела наибольшей ожидаемой длины коммутирующей последовательности.
12. Способ по п. 1, в котором сначала вычисляют коэффициент добротности многообещающей коммутирующей последовательности, причем основываются на, по меньшей мере, одном из следующего: на оптимальной коммутирующей последовательности предыдущего цикла управления, на оптимальной коммутирующей последовательности, которую вычисляют на предыдущем шаге оптимизации с более коротким горизонтом коммутации, чем текущий горизонт коммутации.
13. Способ по любому из пп. 1, 2, 4 - 6, 8, 9, 11, 12, в котором определяют просматриваемую коммутирующую последовательность с наиболее высоким приоритетом, причем во время следующей итерации просматривают коммутирующую последовательность с наиболее высоким приоритетом.
14. Способ по п. 13, в котором приоритет назначают в соответствии с, по меньшей мере, одним из следующих правил:
- назначение приоритета для коммутирующих последовательностей, для которых существует более высокая вероятность того, что они ведут к более низкому коэффициенту добротности;
- назначение приоритета для коммутирующих последовательностей, для которых существует более высокая вероятность того, что они сохраняют выходные величины внутри заданных пределов и/или выходные величины со временем приближаются к заданному пределу;
- назначение приоритета для коммутирующих последовательностей, для которых на основании оценки ожидают, что они ведут к длинным перерывам коммутации без коммутирующих переходов;
- назначение приоритета для коммутирующих последовательностей на основании их коэффициентов добротности;
- назначение приоритета для коммутирующих последовательностей на основании их длины.
15. Способ по любому из пп. 1, 2, 4 - 6, 8, 9, 11, 12, который включает в себя также: завершение генерации коммутирующих последовательностей, когда сгенерированы все коммутирующие последовательности до заданной длины.
16. Способ по любому из пп. 1, 2, 4 - 6, 8, 9, 11, 12, который включает в себя также: завершение генерации коммутирующих последовательностей, когда достигнут верхний предел количества сгенерированных коммутирующих последовательностей или истекло доступное время вычислений.
17. Способ по любому из пп. 1, 2, 4 - 6, 8, 9, 11, 12, который включает в себя также: завершение генерации коммутирующих последовательностей, когда определена коммутирующая последовательность, коэффициент добротности которой превышает нижний предел коэффициентов добротности менее чем на определенный процент.
18. Управляющее устройство (10) для электронного преобразователя (2) частоты, выполненное с возможностью осуществления способа по любому из пп. 1-17.
19. Система двигателя, включающая в себя: вращающуюся электрическую машину (1); электрический преобразователь (2) частоты с управляющим устройством (10) по п. 18, предназначенным для питания вращающейся электрической машины (1) током.
20. Носитель, считываемый компьютером, содержащий коды программы, которая при выполнении на процессоре (16) управляет процессором для осуществления этапов способа по любому из пп. 1-17.
21. Носитель, считываемый компьютером, на котором сохранена компьютерная программа, которая при выполнении на процессоре (16) управляет процессором для осуществления этапов способа по одному из пп. 1-17.
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ | 1998 |
|
RU2149496C1 |
| Устройство для управления @ -фазным вентильным электродвигателем | 1987 |
|
SU1522354A2 |
| JP 2006174697 A, 29.06.2006 | |||
| US 7372233 B2, 13.05.2008 | |||
| US 7256561 B2, 14.08.2007 | |||
| Пневматический валкователь фрезерного торфа | 1989 |
|
SU1670135A1 |
| WO 2009080407 A1, 02.07.2009 | |||

