Изобретение относится к области эксплуатации вращающихся электрических машин. Оно исходит из способа эксплуатации вращающейся электрической машины в соответствии с ограничительными частями независимых пунктов формулы изобретения.
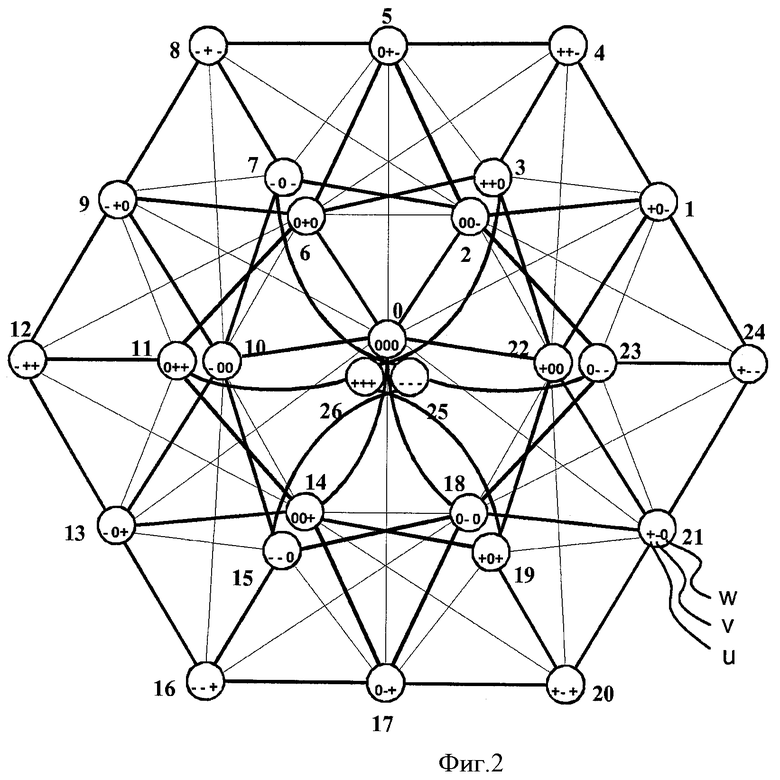
В настоящее время во многих областях используются схемы преобразования напряжения большой мощности. Такая преобразовательная схема коммутирует обычно три уровня напряжения и часто используется для эксплуатации вращающихся электрических машин, в частности синхронных и асинхронных, содержащих обычно три статорные обмотки. При традиционном способе эксплуатации вращающаяся электрическая машина соединена по фазам с такой содержащей цепь постоянного напряжения преобразовательной схемой для коммутации, как правило, m уровней напряжения, причем m≥2. В преобразовательной схеме для коммутации обычно трех уровней напряжения цепь постоянного напряжения образована первым конденсатором и включенным последовательно с ним вторым конденсатором, причем цепь постоянного напряжения имеет к тому же на первом конденсаторе первый главный вывод, на втором конденсаторе - второй главный вывод и образованный двумя последовательно соединенными конденсаторами частичный вывод. Кроме того, преобразовательная схема для коммутации трех уровней напряжения включает в себя силовые полупроводниковые выключатели, соединенные обычным образом. На фиг.1 изображен вариант распространенной трехфазной преобразовательной схемы для коммутации трех уровней напряжения. В части способа фазы преобразовательной схемы соединяются, как правило, с цепью постоянного напряжения по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы. В преобразовательной схеме для коммутации трех уровней напряжения ее фазы соединяются, следовательно, с первым и вторым главными выводами или с частичным выводом по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей. На диаграмме состояний, представленной на фиг.2, показаны эти комбинации и их переходы друг к другу, причем «+» обозначает соединение соответствующей фазы с первым главным выводом, «-» - соединение соответствующей фазы со вторым главным выводом, а «0» - соединение соответствующей фазы с частичным выводом.
Выбор соответствующей комбинации коммутационных состояний осуществляется, например, известным методом непосредственного регулирования крутящего момента (DTC - Direct Torque Control), при котором текущие фактические значения крутящего момента, магнитного потока статора вращающейся электрической машины и потенциала на частичном выводе сначала сравниваются с соответствующим заданным диапазоном значений. Соответствующий заданный диапазон значений изменяется по времени и обычно определяется вышестоящим регулирующим контуром по эталонным значениям крутящего момента вращающейся электрической машины, магнитного потока ее статора и потенциала на частичном выводе. Если текущее фактическое значение превышает свой заданный диапазон значений, то комбинация коммутационных состояний выбирается в зависимости от предыдущей выбранной комбинации коммутационных состояний из таблицы, так что возникающее для этой комбинации текущее значение, во всяком случае, снова могло бы лежать в пределах соответствующего диапазона значений, причем это никоим образом не гарантировано. Кроме того, комбинация коммутационных состояний всегда выбирается только в отношении текущего фактического значения крутящего момента, магнитного потока статора или потенциала при превышении соответствующего диапазона значений. Совместного рассмотрения текущего фактического значения крутящего момента, магнитного потока статора и потенциала не происходит.
Проблема в описанном выше способе эксплуатации вращающейся электрической машины известным методом непосредственного регулирования крутящего момента заключается в том, что между предыдущим и текущим выбранными комбинациями коммутационных состояний обычно имеются несколько переходов, изображенных на фиг.2 в виде линий между комбинациями. Комбинации коммутационных состояний и переходы от одной комбинации к другой хранятся в таблице, как правило, постоянными, причем обычно в таблице на фиг.2 хранятся не все возможности комбинаций. Кроме того, при непосредственном регулировании крутящего момента выбирается только одна комбинация коммутационных состояний в зависимости от предыдущей выбранной комбинации с соответствующими переходами, которая хранится в таблице и которая возникающее для выбранной комбинации текущее значение снова возвращает в пределы соответствующего диапазона значений. Альтернативно выбираемые комбинации коммутационных состояний в таблице не хранятся. Несколько переходов между комбинациями создают, однако, большое число коммутационных операций силовых полупроводниковых выключателей преобразовательной схемы, в результате чего частота их коммутационных циклов возрастает. Однако такая высокая частота коммутационных циклов создает в силовых полупроводниковых выключателях преобразовательной схемы тепловые потери (повышенное энергопотребление), за счет которых силовые полупроводниковые выключатели быстрее стареют и могут быть повреждены или даже разрушены.
В ЕР 1670135 А1 описан способ эксплуатации вращающейся электрической машины, посредством которой можно уменьшить частоту коммутационных циклов силовых полупроводниковых выключателей соединенной с ней по фазам преобразовательной схемы для коммутации m уровней напряжения, причем m≥2. На этапе а) фазы преобразовательной схемы соединяются с цепью постоянного напряжения по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы. Выбор этой комбинации коммутационных состояний осуществляется следующими дополнительными этапами:
b) начиная с момента k начала отсчета выбираемого числа N моментов отсчета: определение всех комбинаций коммутационных состояний в каждый из N моментов отсчета, причем N≥1;
c) формирование последовательностей коммутационных состояний для каждой определенной комбинации коммутационных состояний в момент k начала отсчета, причем каждая последовательность коммутационных состояний является объединением относящихся к данной комбинации коммутационных состояний в момент k начала отсчета определенных комбинаций коммутационных состояний N моментов отсчета;
d) для каждой из последовательностей коммутационных состояний расчет траектории крутящего момента вращающейся электрической машины и траектории магнитного потока ее статора по полученным наборам значений состояний вращающейся электрической машины и преобразовательной схемы для момента k начала отсчета до момента k+N отсчета;
e) выбор последовательности коммутационных состояний, при которой соответствующая траектория крутящего момента и траектория магнитного потока статора в (k+N)-й момент отсчета лежат, каждая, в пределах заданного диапазона значений, и установление этой выбранной последовательности коммутационных состояний;
f) повторение этапов a)-d), причем k=k+1.
В способе, предложенном в ЕР 1670135 А1, этапы b)-е) обычно выполняются в цифровом сигнальном процессоре, причем этапы b)-е) реализованы тогда, например, в виде загружаемой компьютерной программы. Большое число вычислительных этапов этого способа представляет, однако, проблему в отношении вычислительной мощности цифрового сигнального процессора, так что вследствие этого возникает очень длительное и тем самым неприемлемое время расчета и, следовательно, также длительное время выполнения этапов способа, а это может привести к несвоевременному соединению фаз преобразовательной схемы с цепью постоянного напряжения по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей.
Кроме того, в способе согласно ЕР 1670135 А1 возможно, чтобы траектория крутящего момента или траектория магнитного потока статора каждой соответствующей комбинации коммутационных состояний уже в k-й или в (к+1)-й момент отсчета лежала вне заданного диапазона значений, причем способ согласно ЕР 1670135 А1 не позволяет устранить такое состояние. Таким образом, возможна лишь ограниченная эксплуатация вращающейся электрической машины.
Задачей изобретения является усовершенствование способа эксплуатации вращающейся электрической машины таким образом, чтобы можно было сократить продолжительность вычислительных операций и реализовать комбинации коммутационных состояний с соответствующими траекториями крутящего момента или магнитного потока, лежащими вне заданного диапазона значений. Эта задача решается посредством признаков пунктов 1 и 2 формулы изобретения соответственно. В зависимых пунктах приведены предпочтительные варианты осуществления изобретения.
В предложенном способе вращающаяся электрическая машина соединена по фазам с содержащей цепь постоянного напряжения преобразовательной схемой для коммутации m уровней напряжения, причем m≥2. На этапе а) фазы преобразовательной схемы соединяются с цепью постоянного напряжения по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы. Выбор этой комбинации коммутационных состояний осуществляется следующими дополнительными этапами:
b) начиная с момента k начала отсчета для выбираемого числа N моментов отсчета: определение всех допустимых комбинаций коммутационных состояний в каждый из N моментов отсчета, причем N≥1;
c) формирование последовательностей коммутационных состояний для каждой определенной комбинации коммутационных состояний в момент k начала отсчета, причем каждая последовательность коммутационных состояний является объединением относящихся к данной комбинации коммутационных состояний в момент k начала отсчета определенных комбинаций коммутационных состояний N моментов отсчета.
Согласно изобретению выбор комбинации коммутационных состояний осуществляется следующими дополнительными этапами:
d) определение на этапе b) и формирование на этапе с) посредством программируемой пользователем вентильной матрицы (FPGA);
e1) расчет наборов промежуточных значений состояний вращающейся электрической машины и преобразовательной схемы для момента k начала отсчета до момента k+N отсчета посредством цифрового сигнального процессора;
е2) расчет наборов промежуточных значений состояний по последовательностям коммутационных состояний и вычисленным наборам промежуточных значений состояний посредством FPGA;
f) расчет для каждой из последовательностей коммутационных состояний траектории крутящего момента вращающейся электрической машины и траектории магнитного потока ее статора посредством FPGA по вычисленным наборам промежуточных значений состояний для момента k начала отсчета до момента k+N отсчета;
f1) если траектория (М) крутящего момента в k-й момент отсчета не выше заданного верхнего предела (yM,max) диапазона значений или не ниже его заданного нижнего предела (yM,min) и если траектория (ϕ) магнитного потока статора в k-й момент отсчета не выше заданного верхнего предела (yS,max) диапазона значений или не ниже его заданного нижнего предела (yS,min), выбор комбинации (SKa,k) коммутационных состояний на следующих этапах g)-k);
g) выбор последовательностей (SSKa) коммутационных состояний посредством FPGA, при которых соответствующая траектория (М) крутящего момента и траектория (ϕ) магнитного потока статора в (k+N)-й момент отсчета лежит в пределах соответствующего заданного диапазона значений или при которых значения (MT,k,…,MT,k+N) соответствующей траектории (М) крутящего момента и значения (ϕT,k,…ϕT,k+N) соответствующей траектории (ϕ) магнитного потока статора в k-й момент отсчета до (k+N)-го момента отсчета приближаются к соответствующему заданному диапазону значений;
h) для каждой из выбранных последовательностей (SSKa) коммутационных состояний определение числа n моментов посредством FPGA, пока экстраполяция значений (MT,k+N-1, MT,k+N) соответствующей траектории (М) крутящего момента или значений (ϕT,k+N-1, ϕТ,k+N) соответствующей траектории (ϕ) магнитного потока статора в (k+N-1)-й момент отсчета до (k+N)-го момента отсчета не будет лежать вне соответствующего заданного диапазона значений;
i) для каждой из выбранных последовательностей (SSKa) коммутационных состояний определение общего числа коммутационных переходов s соответствующих определенных комбинаций (SKk,…,SKk+N) коммутационных состояний посредством FPGA;
j) для каждой из выбранных последовательностей (SSKa) коммутационных состояний расчет коэффициента с добротности по числу n моментов и общему числу коммутационных переходов s посредством FPGA;
k) установление той определенной комбинации (SKk) коммутационных состояний в момент k начала отсчета в качестве выбранной комбинации (SKa,k) коммутационных состояний посредством FPGA, при которой коэффициент с добротности соответствующей выбранной последовательности (SSKa) коммутационных состояний наименьший;
l) если траектория (М) крутящего момента в k-й момент отсчета выше заданного верхнего предела (yM,max) диапазона значений или ниже его заданного нижнего предела (yM,min), расчет отнесенного к верхнему (yM,max) и нижнему (yM,min) пределам диапазона значений значения (vM,k,…,vM,k+N) нарушения крутящего момента посредством FPGA в момент k отсчета до момента k+N отсчета, а если траектория (ϕ) магнитного потока статора в k-й момент отсчета выше заданного верхнего предела (yM,max) диапазона значений или ниже его заданного нижнего предела (yM,min), расчет отнесенного к верхнему (yM,max) и нижнему (yM,min) пределам диапазона значений значения (vS,k,…,vS,k+N) нарушения потока статора посредством FPGA для момента k отсчета до момента k+N отсчета;
выбор комбинации (SKa,k) коммутационных состояний на следующих этапах m)-о);
m) для каждой последовательности (SSK) коммутационных состояний и для момента k отсчета до момента k+N отсчета определение максимального значения (vmax) по значениям (vM,k,…,VM,k+N) нарушения крутящего момента и значениям (vS,k,…,VS,k+N) нарушения потока статора посредством FPGA;
n) для каждой последовательности (SSK) коммутационных состояний формирование суммы (Svmax) из максимальных значений (vmax) посредством FPGA;
о) установление той определенной комбинации (SKk) коммутационных состояний в момент k начала отсчета в качестве выбранной комбинации (SKa,k) коммутационных состояний посредством FPGA, при которой сумма (Svmax) максимальных значений (vmax) наименьшая;
р) повторение этапов а)-о), причем k=k+1.
В качестве альтернативы этапам m)-о) выбор комбинации коммутационных состояний может осуществляться следующими дополнительными этапами:
m) для каждой последовательности (SSK) коммутационных состояний и для момента k отсчета до момента k+N отсчета определение максимального значения (vmax) по значениям (vM,k,…,vM,k+N) нарушения крутящего момента и значениям (vS,k,…,vS,k+N) нарушения потока статора посредством FPGA;
n) для каждой последовательности (SSK) коммутационных состояний формирование суммы (Svmax) их максимальных значений (vmax) посредством FPGA;
о) установление той определенной комбинации (SKk) коммутационных состояний в момент k начала отсчета в качестве выбранной комбинации (SKa,k) коммутационных состояний посредством FPGA, при которой сумма (Svmax) максимальных значений (vmax) наименьшая.
За счет использования FPGA на этапах d), т.е. на этапах b) и с), и на этапах f)-k) цифровой сигнальный процессор, используемый на этапе e1), используется только для необходимых для осуществления этапа e1) вычислительных операций, так что этап e1) требует лишь короткой продолжительности вычислений. Таким образом, вычисленные на этапе e1) наборы промежуточных значений состояний имеются в распоряжении уже через очень короткое время и посредством FPGA могут использоваться дальше непосредственно, в частности на этапах d), т.е. на этапах b) и с) и на этапах е2)-k), причем FPGA отрабатывает эти этапы также в очень короткое время, в частности, за счет своей возможности параллельного расчета последовательностей расчета. В целом за счет использования FPGA в сочетании с цифровым сигнальным процессором продолжительность вычислительных операций и тем самым продолжительность выполнения этапов способа можно поддерживать предпочтительно короткой, так что соединение фаз преобразовательной схемы с цепью постоянного напряжения по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей происходит всегда своевременно.
На этапах b)-k) выбирается всегда оптимальная комбинация коммутационных состояний исходя из предыдущей выбранной комбинации коммутационных состояний и в отношении числа переходов от предыдущей выбранной комбинации коммутационных состояний к выбранной комбинации коммутационных состояний, в отношении соответствующего заданного диапазона значений крутящего момента вращающейся электрической машины и магнитного потока в ее статоре. Таким образом можно уменьшить число коммутационных операций силовых полупроводниковых выключателей преобразовательной схемы и тем самым частоту их коммутационных циклов. Меньшая частота коммутационных циклов приводит к тому, что в силовых полупроводниковых выключателях вырабатывается меньше тепловых потерь, благодаря чему они медленнее стареют и в самой значительной степени могут быть защищены от повреждения или разрушения. Кроме того, соответствующие диапазоны значений соблюдаются в целом лучше.
Предложенный способ позволяет прогнозировать поведение вращающейся электрической машины более чем на один момент отсчета для определенных последовательностей коммутационных состояний, причем горизонт N моментов отсчета после выполнения этапов а)-k) за счет этапа р) смещается на один момент отсчета, затем выбирается всегда только первая комбинация коммутационных состояний, в частности k-я комбинация коммутационных состояний, последовательности коммутационных состояний. Критерий качества аппроксимирует или имитирует тогда частоту коммутационных циклов. Наконец, в предложенном способе комбинации коммутационных состояний в отношении всех релевантных величин, в частности крутящего момента и магнитного потока статора, при превышении соответствующего диапазона значений рассматриваются сообща.
В случае если траектория крутящего момента или траектория магнитного потока статора лежит вне заданного диапазона значений, с помощью этапов l)-о) всегда выбирается оптимальная комбинация коммутационных состояний. Таким образом, благодаря предложенному способу можно манипулировать комбинациями коммутационных состояний с соответствующими траекториями крутящего момента и магнитного потока статора, лежащими вне заданного диапазона значений. Вследствие этого возможна неограниченная эксплуатация вращающейся электрической машины.
Эти и другие задачи, преимущества и признаки изобретения становятся очевидными из нижеследующего подробного описания предпочтительных вариантов его осуществления в сочетании с чертежами.
На чертежах изображают:
фиг.1 - вариант трехфазной преобразовательной схемы для коммутации трех уровней напряжения;
фиг.2 - диаграмму комбинаций коммутационных состояний фаз преобразовательной схемы;
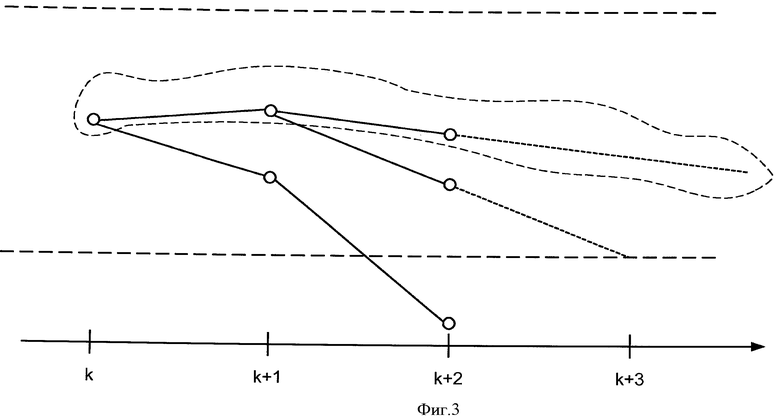
фиг.3 - схематичную характеристику вычисленных траекторий крутящего момента для N=2 моментов отсчета.
Использованные на чертежах ссылочные позиции и их значения перечислены в перечне. В принципе, одинаковые детали обозначены одинаковыми ссылочными позициями. Описанные варианты являются примером объекта изобретения и не обладают ограничительным действием.
На фиг.1 изображен вариант трехфазной преобразовательной схемы 2 для коммутации трех уровней напряжения, причем вращающаяся электрическая машина 1 соединена по фазам с содержащей цепь 3 постоянного напряжения преобразовательной схемой 2. Как правило, машина 1 может быть соединена с преобразовательной схемой 2 для коммутации m уровней напряжения, причем тогда m≥2. На фиг.1 цепь 3 постоянного напряжения образована первым C1 и включенным последовательно с ним вторым С2 конденсаторами, причем емкость C1, в основном, равна емкости С2. Цепь 3 содержит на конденсаторе С1 первый главный вывод V+, на конденсаторе С2 - второй главный вывод V- и образованный обоими последовательно включенными конденсаторами C1, C2 частичный вывод NP. Кроме того, схема содержит предусмотренную для каждой фазы u, v, w субпреобразовательную систему 4, образованную соответственно первой 5, второй 6 и третьей 7 коммутационными группами, причем каждая из них образована двумя последовательно включенными силовыми полупроводниковыми выключателями. В каждой субпреобразовательной системе 4 коммутационная группа 5 соединена с главным выводом V+, а коммутационная группа 6 - с главным выводом V-. Коммутационная группа 5 соединена последовательно с коммутационной группой 6, причем точка их соединения образует фазный вывод. Коммутационная группа 7, выполненная в виде клеммной коммутационной группы, соединена с коммутационной группой 5, в частности с точкой соединения ее двух последовательно включенных силовых полупроводниковых выключателей. Коммутационная группа 7 соединена с коммутационной группой 6, в частности с точкой соединения ее двух последовательно включенных силовых полупроводниковых выключателей. Кроме того, коммутационная группа 7, в частности точка соединения ее двух последовательно включенных силовых полупроводниковых выключателей, соединена с частичным выводом NP. Силовые полупроводниковые выключатели коммутационных групп 5, 6 выполнены в виде управляемых двунаправленных силовых полупроводниковых выключателей, причем силовые полупроводниковые выключатели коммутационной группы 7 выполнены в виде неуправляемых однонаправленных силовых полупроводниковых выключателей. Однако возможно, чтобы силовые полупроводниковые выключатели коммутационной группы 7 также были выполнены в виде управляемых двунаправленных силовых полупроводниковых выключателей.
Фазы u, v, w преобразовательной схемы 2, которая представляет собой в целом преобразовательную схему 2 для коммутации m уровней напряжения, на первом этапе а) соединяются с цепью 3 постоянного напряжения по выбранной комбинации SKa,k коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы 2. Как уже сказано, на фиг.2 изображена диаграмма комбинаций коммутационных состояний преобразовательной схемы 2 для коммутации трех уровней напряжения, причем «+» обозначает соединение соответствующей фазы u, v, w с главным выводом V+, «-» - соединение соответствующей фазы u, v, w с главным выводом V-, «0» - соединение соответствующей фазы u, v, w с частичным выводом NP, a линии между комбинациями SK коммутационных состояний - переходы между этими комбинациями SK. Следует заметить, что диаграмма комбинаций коммутационных состояний преобразовательной схемы 2 для коммутации, например, m=5 уровней напряжения выглядела бы иначе. В частности, специалист может надежно реализовать преобразовательную схему, в которой исходя из комбинации SK коммутационных состояний без ограничений могут коммутироваться все возможные коммутируемые комбинации SK коммутационных состояний этой преобразовательной схемы.
Выбор упомянутой комбинации SKa,k коммутационных состояний осуществляется следующими этапами.
На этапе b), начиная с момента k начала отсчета для выбираемого числа N моментов отсчета, определяются все допустимые комбинации SKk,…,SKk+N коммутационных состояний в каждый из N моментов отсчета, преимущественно исходя из соответственно предыдущей комбинации SKk-1 коммутационных состояний, причем N≥1, а преимущественно первая предыдущая определенная комбинация коммутационных состояний является предыдущей выбранной комбинацией коммутационных состояний, например, в момент k-1 отсчета.
На этапе с) формируются последовательности SSK коммутационных состояний для каждой определенной комбинации SKk коммутационных состояний в момент k начала отсчета, причем каждая последовательность SSK коммутационных состояний является объединением относящихся к соответствующей определенной комбинации SKk коммутационных состояний в момент k начала отсчета определенных комбинаций SKk,…,SKk+N коммутационных состояний в N моментов отсчета. Такая последовательность SSK коммутационных состояний представляет в качестве примера ряд возможных комбинаций SKk,…,SKk+N коммутационных состояний вдоль относящихся к одной из возможных комбинаций SKk коммутационных состояний линий в момент k начала отсчета.
Согласно изобретению выбор комбинации SKa,k коммутационных состояний осуществляется следующими дополнительными этапами.
На этапе d) посредством FPGA осуществляется определение по этапу b) и формирование по этапу с). На этапе e1) осуществляется расчет наборов промежуточных значений Ye,k,…,Ye,k+N состояний вращающейся электрической машины 1 и преобразовательной схемы 2 в момент k начала отсчета до момента k+N отсчета посредством цифрового сигнального процессора. На этапе е2) посредством FPGA осуществляется затем расчет наборов значений Хе,k,…,Xe,k+N состояний по последовательностям SSK коммутационных состояний и вычисленным наборам промежуточных значений Ye,k,…,Ye,k+N состояний. На этапе f) посредством FPGA для каждой из последовательностей SSK коммутационных состояний вычисляются траектория М крутящего момента вращающейся электрической машины 1 и траектория □ магнитного потока ее статора по вычисленным наборам значений Xe,k,…,Xe,k+N состояний вращающейся электрической машины и преобразовательной схемы в момент k начала отсчета до момента k+N отсчета. Траектория М крутящего момента вращающейся электрической машины 1 и траектория ϕ магнитного потока ее статора имеют тогда значения соответственно MT,k+2,…,MT,k+N и ϕT,k+2,…,ϕT,k+N. Каждый из упомянутых наборов промежуточных значений Ye,k,…,Ye,k+N состояний содержит, например, два значения потока статора ϕeS1,k,…,ϕeS1,k+N; ϕeS2,k,…, ϕeS2,k+N два значения потока ротора ϕeR1,k,…,ϕeR1,k+N; ϕeR2,k,…,ϕeR2,k+N и, при необходимости, значение скорости Ve,k,…,Ve,k+N. Для расчета наборов промежуточных значений Ye,k,…,Ye,k+N состояний оба значения потока статора ϕeS1,k,…, ϕeS1,k+N; ϕeS2,k,…,ϕeS2,k+N, оба значения потока ротора ϕeR1,k,…,ϕeR1,k+N; ϕeR2,k,…,ϕeR2,k+N и, при необходимости, значение скорости Ve,k,…,Ve,k+N вычисляют посредством цифрового сигнального процессора по оцененным или полученным за счет измерения параметрам двигателя, причем эти вычисленные значения образуют тогда наборы промежуточных значений Ye,k,…,Ye,k+N состояний. После этого посредством FPGA на этапе е2) осуществляется уже упомянутый расчет наборов значений Хе,k,…,Хе,k+N состояний по известной специалисту модели по последовательностям SSK коммутационных состояний и вычисленным наборам промежуточных значений Ye,k,…,Ye,k+N состояний. Расчет наборов значений Xe,k,…,Xe,k+N состояний является интерактивным, т.е., например, для расчета набора значений Xe,k+1 состояний в момент k+1 отсчета привлекаются предыдущий набор промежуточных значений Ye,k в момент k отсчета и последовательности SSK коммутационных состояний для определенных комбинаций SKk коммутационных состояний в момент k отсчета.
Цифровой сигнальный процессор используется только для необходимых на этапе e1) вычислительных операций, т.е. для расчета наборов промежуточных значений Ye,k,…,Ye,k+N состояний. Таким образом, вычисленные на этапе e1) наборы промежуточных значений Ye,k,…,Ye,k+N состояний имеются в распоряжении предпочтительно уже через очень короткое время и за счет FPGA могут использоваться затем дальше непосредственно для расчета наборов значений Xe,k,…, Xe,k+N состояний, а также траектории М крутящего момента и траектории ϕ потока статора. Если, например, для расчета значения MT,k,…, MT,k+N траектории М крутящего момента необходимо несколько вычислительных операций, таких как сложение, умножение и т.п., то эти вычислительные операции отрабатываются предпочтительно посредством FPGA, так что возникает последовательность вычислений (т.н. «pipelining»). Расчет значения ϕT,k,…, ϕT,k+N траектории ϕ магнитного потока статора осуществляется аналогичным образом посредством FPGA, причем последовательность вычислений для расчета значения MT,k,…, MT,k+N траектории М крутящего момента протекает в FPGA предпочтительно параллельно последовательности вычислений для расчета значения ϕT,k,…, ϕT,k+N траектории ϕ магнитного потока статора, благодаря чему можно эффективно сократить продолжительность вычислений.
За счет описанного выше расчета значений MT,k,…, MT,k+N; ϕT,k,…, ϕT,k+N траекторий для каждой последовательности SSK коммутационных состояний возникают упомянутая траектория М крутящего момента вращающейся электрической машины 1 и траектория ϕ магнитного потока ее статора, причем на фиг.3 в качестве примера изображена схематичная характеристика таких вычисленных траекторий М крутящего момента соответствующих последовательностей SSK коммутационных состояний для N=2 моментов отсчета, причем точки траекторий М крутящего момента соответствуют полученным значениям MT,k,…, MT,k+N траектории. Следует отметить, что сначала можно определить все наборы значений Xe,k,…, Xe,k+N состояний для моментов отсчета k до k+N в соответствии с поясненными действиями и только после этого по ним вычисляются соответствующие значения MT,k,…, MT,k+N; ϕT,k,…, ϕT,k+N для моментов отсчета k до k+N для образования траектории М крутящего момента и траектории ϕ магнитного потока статора в соответствии с описанными действиями.
На этапе f1) осуществляется выбор комбинации SKa,k коммутационных состояний следующими этапами g)-k), если траектория М крутящего момента в k-й момент отсчета не выше заданного верхнего предела yM,max диапазона значений или не ниже его заданного нижнего предела yM,min и если траектория ϕ магнитного потока статора в k-й момент отсчета не выше заданного верхнего предела yS,max диапазона значений или не ниже его заданного нижнего предела yS,min. На следующем этапе g) посредством FPGA выбираются последовательности SSKa коммутационных состояний, при которых соответствующая траектория М крутящего момента и траектория ϕ магнитного потока статора в (k+N)-й момент отсчета лежит в пределах соответствующего заданного диапазона значений. В отношении траектории М крутящего момента диапазон значений определяется заданными верхним yM,max и нижним yM,min пределами. В отношении траектории ϕ магнитного потока статора диапазон значений определяется заданными верхним yS,max и нижним yS,min пределами. На фиг.3 это было бы справедливо только для обеих верхних траекторий М крутящего момента, но не для нижней траектории М, причем заданный диапазон значений обозначен двумя горизонтальными штриховыми линиями. Следует отметить, что соответствующий заданный диапазон значений является изменяющимся по времени и обычно определяется вышестоящим регулирующим контуром по эталонным значениям крутящего момента вращающейся электрической машины 1 и магнитного потока ее статора, причем такие регулирующие контуры известны специалисту. Преимущественно такой регулирующий контур реализован в цифровом сигнальном процессоре, т.е. диапазон значений создается цифровым сигнальным процессором. В качестве альтернативы выбираются последовательности SSKa коммутационных состояний, при которых значения MT,k,…, MT,k+N соответствующей траектории М крутящего момента и значения ϕT,k,…, ϕT,k+N соответствующей траектории ϕ магнитного потока статора в отношении k-го момента отсчета до (k+N)-го момента отсчета приближаются к соответствующему заданному диапазону значений.
На этапе h) для каждой из выбранных последовательностей SSKa коммутационных состояний посредством FPGA определяется число n моментов, пока экстраполяция значений MT,k+N-1, MT,k+N соответствующей траектории М крутящего момента или значений ϕT,k+N-1, ϕТ,k+N соответствующей траектории ϕ магнитного потока статора в отношении (k+N-1)-го и (k+N)-го моментов отсчета не будет лежать вне соответствующего заданного диапазона значений, т.е. пока одна из экстраполяций не покинет первой соответствующий заданный диапазон значений или не пересечет его пределы. Упомянутое определение посредством FPGA протекает предпочтительно также последовательно (т.н. «pipelining»). На фиг.3 соответствующая экстраполяция для обеих верхних релевантных траекторий М крутящего момента обозначена штриховой линией, причем экстраполяция одной верхней релевантной траектории М крутящего момента покидает заданный диапазон значений уже при k+3, а экстраполяция другой верхней релевантной траектории М крутящего момента, для лучшего понимания обведенная штриховой линией, при k+3 лежит еще в пределах заданного диапазона значений.
Далее на этапе i) для каждой из выбранных последовательностей SSKa коммутационных состояний посредством FPGA определяется общее число коммутационных переходов s соответствующих определенных комбинаций SKk,…SKk+N коммутационных состояний. Это определение посредством FPGA протекает предпочтительно также последовательно (т.н. «pipelining»).
Далее на этапе j) для каждой из выбранных последовательностей SSKa коммутационных состояний посредством FPGA вычисляется коэффициент с добротности по числу n моментов и общему числу коммутационных переходов s. Преимущественно коэффициент с добротности вычисляется путем деления общего числа коммутационных переходов s на число n моментов. Этот расчет посредством FPGA протекает предпочтительно последовательно (т.н. «pipelining»).
На следующем этапе k) посредством FPGA в момент k начала отсчета в качестве выбранной комбинации SKa,k коммутационных состояний устанавливается та определенная комбинация SKk коммутационных состояний, при которой коэффициент с добротности соответствующей выбранной последовательности SSKa коммутационных состояний наименьший. Это установление посредством FPGA протекает предпочтительно последовательно (т.н. «pipelining»).
На следующем этапе 1), если вместо этапа f1) траектория М крутящего момента в k-й момент отсчета выше заданного верхнего предела yM,max диапазона значений или ниже его заданного нижнего предела yM,min, то посредством FPGA вычисляется отнесенное к верхнему yM,max и нижнему yM,min пределам диапазона значений значение vM,k,…,VM,k+N нарушения крутящего момента для момента k отсчета до момента k+N отсчета, а если траектория ϕ магнитного потока статора в k-й момент отсчета выше заданного верхнего предела yM,max диапазона значений или ниже его заданного нижнего предела yM,min, то посредством FPGA вычисляется отнесенное к верхнему yM,max и нижнему yM,min пределам диапазона значений значение vS,k,…,vS,k+N нарушения потока статора для момента к отсчета до момента k+N отсчета. Тогда на этапе m) для каждой последовательности SSK коммутационных состояний и для момента k отсчета до момента k+N отсчета посредством FPGA определяется максимальное значение vmax по значениям VM,k,…,VM,k+N нарушения крутящего момента и значениям vS,k,…,vS,k+N нарушения потока статора. Затем на этапе n) для каждой последовательности SSK коммутационных состояний из максимальных значений vmax формируется сумма Svmax. На следующем этапе о) посредством FPGA в качестве выбранной комбинации SKa,k коммутационных состояний устанавливается та определенная комбинация SKk коммутационных состояний в момент k начала отсчета, при которой сумма Svmax максимальных значений vmax наименьшая.
В качестве альтернативы этапам m)-о) выбор комбинации коммутационных состояний может осуществляться следующими дополнительными этапами:
m) для каждой последовательности SSK коммутационных состояний и для момента k отсчета до момента k+N отсчета определение максимального значения vmax по значениям vM,k,…,vM,k+N нарушения крутящего момента и значениям vS,k,…,vS,k+N нарушения потока статора посредством FPGA;
n) для каждой последовательности SSK коммутационных состояний формирование суммы Svmax из максимальных значений vmax посредством FPGA;
о) установление той определенной комбинации SKk коммутационных состояний в момент k начала отсчета в качестве выбранной комбинации SKa,k коммутационных состояний посредством FPGA, при которой сумма Svmax максимальных значений vmax наименьшая.
Наконец, на этапе р) повторение этапов а)-о), причем k=k+1, т.е. выбор комбинации SKa,k коммутационных состояний происходит для k=k+1 в соответствии с описанным выполнением этапов a)-k). N для каждого из этапов а)-l) постоянное.
За счет использования FPGA на этапах d), т.е. на этапах b) и с), и на этапах f)-k) цифровой сигнальный процессор, используемый на этапе e1), используется только на необходимых для осуществления этапа e1) вычислительных операций, так что этап e1) требует лишь короткой продолжительности вычислений. Таким образом, вычисленные на этапе e1) наборы Ye,k,…,Ye,k+N промежуточных значений состояний имеются в распоряжении уже через очень короткое время и посредством FPGA могут использоваться дальше непосредственно, в частности, на этапах d), т.е. на этапах b) и с), и на этапах е2)-k), причем FPGA отрабатывает эти этапы также в очень короткое время, в частности, за счет своей возможности параллельного расчета последовательностей расчета. Предпочтительно определение на этапах h)-k) протекает посредством FPGA последовательно. В целом за счет использования FPGA в сочетании с цифровым сигнальным процессором продолжительность вычислительных операций и тем самым продолжительность выполнения этапов способа можно поддерживать предпочтительно короткой, так что соединение фаз u, v, w преобразовательной схемы 2 с цепью 3 постоянного напряжения по выбранной комбинации SKa,k коммутационных состояний силовых полупроводниковых выключателей происходит всегда своевременно.
С помощью этапов b)-k) и, в частности, за счет экстраполяции также можно прогнозировать дальнейшее поведение всей системы, т.е. вращающейся электрической машины 1 и соединенной с ней преобразовательной схемы 2, и вслед за этим предпочтительно всегда выбирать оптимальную комбинацию SKa,k коммутационных состояний исходя из предыдущей выбранной комбинации SKa,k-1 коммутационных состояний и в отношении числа переходов от нее к выбранной комбинации SKa,k коммутационных состояний, в отношении соответствующего заданного диапазона значений крутящего момента вращающейся электрической машины 1 и магнитного потока ее статора. Это позволяет уменьшить число коммутационных операций силовых полупроводниковых выключателей преобразовательной схемы 2 и тем самым частоту их коммутационных циклов. Благодаря меньшей частоте коммутационных циклов силовые полупроводниковые выключатели вырабатывают предпочтительно меньше тепловых потерь и расходуют за счет этого меньше энергии, так что они в результате медленнее стареют и в самой значительной степени могут быть защищены от повреждения или разрушения.
В случае если траектория М крутящего момента или траектория ϕ магнитного потока статора лежит вне заданного диапазона значений, с помощью этапов l)-о) всегда выбирается оптимальная комбинация SKa,k коммутационных состояний. Таким образом, благодаря предложенному способу можно манипулировать комбинациями коммутационных состояний с соответствующей траекторией М крутящего момента и траекторией □ магнитного потока статора, лежащими вне заданного диапазона значений. Вследствие этого возможна неограниченная эксплуатация вращающейся электрической машины 1.
Как уже сказано, на фиг.1 изображена преобразовательная схема 2 для коммутации m=3 уровней напряжения, причем цепь 3 постоянного напряжения имеет тогда m-2 частичных выводов NP, т.е. единственный частичный вывод NP. Для общего случая преобразовательной схемы 2 для коммутации m уровней напряжения при m≥3 она имеет тогда в цепи 3 постоянного напряжения m-2 частичных выводов NP. В отношении этапа f) это означает, что для каждой из последовательностей SSK коммутационных состояний посредством FPGA дополнительно вычисляются m-2 траекторий UNP потенциалов на m-2 частичных выводах NP по наборам Хе,k,…, Хе,k+N значений состояния вращающейся электрической машины 1 и преобразовательной схемы 2 для момента k начала отсчета до момента k+N отсчета. Данный расчет осуществляется аналогично уже описанному расчету соответствующей траектории М крутящего момента и траектории ϕ магнитного потока статора. Далее для m≥3 на этапе g) посредством FPGA выбираются последовательности SSKa коммутационных состояний, при которых дополнительно соответствующие m-2 траектории UNP потенциалов в (k+N)-й момент отсчета лежат соответственно в пределах заданного диапазона значений или при которых дополнительно значения UNP,k,…, UNP,k+N траекторий UNP потенциалов в (k+N)-й момент отсчета приближаются к соответствующему заданному диапазону значений. В отношении траекторий UNP потенциалов диапазон значений определяется его заданными верхним YNP,max и нижним yNP,min пределами. Далее для m≥3 на этапе h) для каждой из выбранных последовательностей SSKa коммутационных состояний посредством FPGA определяется число n моментов, пока экстраполяция значений MT,k+N-1, MT,k+N соответствующей траектории М крутящего момента или значений ϕT,k+N-1, ϕТ,k+N соответствующей траектории ϕ магнитного потока статора или значений UNP,k,…, UNP,k+n m-2 траекторий UNP потенциалов в отношении (k+N-1)-го и (k+N)-го моментов отсчета не будет лежать вне соответствующего заданного диапазона значений. Понятно, что для m≥3 этапы а)-е2) и i)-k) сохраняются.
Для m≥3 за счет этапов b)-k) и, в частности, за счет экстраполяции также можно прогнозировать дальнейшее поведение всей системы, т.е. вращающейся электрической машины 1 и соединенной с ней преобразовательной схемы 2, и вслед за этим предпочтительно всегда выбирать оптимальную комбинацию SKa,k коммутационных состояний исходя из предыдущей выбранной комбинации SKa,k-1 коммутационных состояний и в отношении числа переходов от нее к выбранной комбинации SKa,k коммутационных состояний и в отношении соответствующего заданного диапазона значений крутящего момента вращающейся электрической машины 1 и магнитного потока ее статора, а также для m-2 потенциалов на m-2 частичных выводах NP. Как уже сказано, это позволяет уменьшить число коммутационных операций силовых полупроводниковых выключателей преобразовательной схемы 2 и тем самым частоту их коммутационных циклов.
На следующем этапе q) этапы b) и с) пропускаются и посредством FPGA формируется последовательность SSK коммутационных состояний для предыдущей выбранной комбинации SKa,k-1 коммутационных состояний, причем последовательность SSK коммутационных состояний является тогда объединением N предыдущих выбранных комбинаций SKa,k-1 коммутационных состояний, а предыдущая выбранная комбинация SKa,k-1 коммутационных состояний посредством FPGA устанавливается в качестве выбранной комбинации SKa,k коммутационных состояний, и, наконец, используется этап f), а этапы f1)-o) пропускаются, если значения MT,k+N-1,…, MT,k+N соответствующей траектории М крутящего момента и значения ϕT,k+N-1,…, ϕТ,k+N соответствующей траектории ϕ магнитного потока статора в k-й момент отсчета до (k+N)-го момента отсчета лежат в пределах соответствующего заданного диапазона значений. Для m≥3 на следующем этапе q) этапы b) и с) пропускаются и посредством FPGA формируется последовательность SSK коммутационных состояний для предыдущей выбранной комбинации SKa,k-1 коммутационных состояний, причем последовательность SSK коммутационных состояний является тогда объединением N предыдущих выбранных комбинаций SKa,k-1 коммутационных состояний, а предыдущая выбранная комбинация SKa,k-1 коммутационных состояний посредством FPGA устанавливается в качестве выбранной комбинации SKa,k коммутационных состояний, и, наконец, используется этап f), а этапы f1)-o) пропускаются, если значения MT,k+N-1, MT,k+N соответствующей траектории М крутящего момента, значения ϕT,k+N-1, ϕТ,k+N соответствующей траектории ϕ магнитного потока статора и значения UNP,k,…, UNP,k+N m-2 траекторий UNP потенциалов в отношении k-го момента отсчета до (k+N)-го момента отсчета лежат в пределах соответствующего заданного диапазона значений. Таким образом, сокращается продолжительность вычислений, поскольку этапы b), с) и f)-o) пропускаются. Понятно, что тогда используются этапы b)-о), а дополнительный этап q) не используется, если не выполнены вышеназванные критерии для значений MT,k+N-1, MT,k+N, ϕT,k+N-1, ϕТ,k+N и UNP,k,…, UNP,k+N траекторий.
Оказалось предпочтительным, что для экстраполяции значений MT,k+N-1, MT,k+N траектории М крутящего момента выбирается линейная экстраполяция, а для экстраполяции значений ϕT,k+N-1, ϕТ,k+N траектории ϕ магнитного потока статора -квадратичная экстраполяция. В этом случае за счет выбора квадратичной экстраполяции для траектории ϕ магнитного потока статора в комбинации с выбором линейной экстраполяции для траектории М крутящего момента обеспечивается особенно точный прогноз поведения всей системы, так что выбор комбинации SKa,k коммутационных состояний может быть дополнительно уточнен, следствием чего является уменьшение числа коммутационных циклов силовых полупроводниковых выключателей. В качестве альтернативы при m≥3 для экстраполяции значений MT,k+N-1, MT,k+N траектории М крутящего момента и значений UNP,k,…,UNP,k+N m-2 траекторий UNP потенциалов можно выбрать соответственно линейную экстраполяцию, а для экстраполяции значений ϕT,k+N-1, ϕТ,k+N траектории ϕ магнитного потока статора - квадратичную экстраполяцию, причем возникают те же названные преимущества.
Далее можно выбрать для экстраполяции значений MT,k+N-1, MT,k+N траектории М крутящего момента и значений ϕT,k+N-1, ϕТ,k+N траектории ϕ магнитного потока статора соответственно линейную экстраполяцию, причем при m≥3 для экстраполяции значений MT,k+N-1, MT,k+N траектории М крутящего момента, значений ϕT,k+N-1, ϕТ,k+N траектории ϕ магнитного потока статора и дополнительно для экстраполяции значений UNP,k,…, UNP,k+N m-2 траекторий UNP потенциалов можно выбрать соответственно линейную экстраполяцию.
Другая возможность состоит в том, чтобы для экстраполяции значений MT,k+N-1, MT,k+N траектории М крутящего момента и значений ϕT,k+N-1, ϕТ,k+N траектории ϕ магнитного потока статора выбрать соответственно квадратичную экстраполяцию, причем при m≥3 для экстраполяции значений MT,k+N-1, MT,k+N траектории М крутящего момента и значений ϕT,k+N-1, ϕТ,k+N траектории ϕ магнитного потока статора выбирается соответственно квадратичная экстраполяция, а дополнительно для экстраполяции значений UNP,k,…, UNP,k+N m-2 траекторий UNP потенциалов - линейная экстраполяция.
Как уже сказано, для общего случая преобразовательной схемы 2 для коммутации m уровней напряжения при m≥3 она имеет в цепи 3 постоянного напряжения m-2 частичных выводов NP. В отношении этапа а) это означает, что для каждой из последовательностей SSK коммутационных состояний посредством FPGA дополнительно вычисляются m-2 траекторий UNP потенциалов на m-2 частичных выводах NP. Если m-2 траектории UNP потенциалов в k-й момент отсчета выше заданного верхнего предела yNP,max или ниже заданного нижнего предела yNP,min диапазона значений, то на этапе 1) посредством FPGA вычисляется отнесенное к верхнему yNP,max и нижнему yNP,min пределам диапазона значений значение VNP,k,…, VNP,k+N нарушения потенциалов в момент k отсчета до момента k+N отсчета, а на этапе m) для каждой последовательности SSK коммутационных состояний и в момент k отсчета до момента k+N отсчета максимальное значение vmax определяется посредством FPGA дополнительно по значениям VNP,k,…,VNP,k+N нарушения потенциалов.
В качестве альтернативы этому при m≥3 на этапе m) для каждой последовательности SSK коммутационных состояний и для момента k отсчета до момента k+N отсчета дополнительно формируется сумма SNP,v из значений VNP,k,…, VNP,k+N нарушения потенциалов, а на этапе n) для каждой последовательности SSK коммутационных состояний максимальное значение Vmax формируется дополнительно из суммы SNP,v значений VNP,k,…, VNP,k+N нарушения потенциалов.
Ниже более подробно описан расчет значений VN,k,…, VM,k+N нарушения крутящего момента, значений VS,k,…,VS,k+N нарушения потока статора и значений VNP,k,…,VNP,k+N нарушения потенциалов. Если траектория М крутящего момента в k-й момент отсчета превышает заданный верхний предел yM,max диапазона значений, то расчет отнесенного к верхнему yM,max и нижнему yM,min пределам диапазона значений значения VM,k,…, VM,k+N нарушения крутящего момента в момент k отсчета до момента k+N отсчета осуществляется по следующей формуле:

Если же траектория М крутящего момента в k-й момент отсчета ниже заданного нижнего предела yM,min диапазона значений, то расчет отнесенного к верхнему yM,max и нижнему yM,min пределам диапазона значений значения VM,k,…, VM,k+N нарушения крутящего момента в момент к отсчета до момента k+N отсчета осуществляется по следующей формуле:

При этом MT,k,…,MT,k+N - значения траектории М крутящего момента в момент k отсчета до момента k+N отсчета.
Если траектория магнитного потока статора в k-й момент отсчета превышает заданный верхний предел yS,max диапазона значений, то расчет отнесенного к верхнему yS,max и нижнему yS,min пределам диапазона значений значения Vs,k,…, VS,k+N нарушения потока статора в момент k отсчета до момента k+N отсчета осуществляется по следующей формуле:

Если же траектория ϕ магнитного потока статора в k-й момент отсчета ниже заданного нижнего предела yS,min диапазона значений, то расчет отнесенного к верхнему yS,max и нижнему yS,min пределам диапазона значений значения VS,k,…, VS,k+N нарушения потока статора в момент k отсчета до момента k+N отсчета осуществляется по следующей формуле:

При этом ϕT,k,…,ϕT,k+N - значения траектории ϕ магнитного потока статора в момент k отсчета до момента k+N отсчета.
Если m-2 траектории UNP потенциалов в k-й момент отсчета превышают заданный верхний предел yNP,max диапазона значений, то расчет отнесенного к верхнему yNP,max и нижнему yNP,min пределам диапазона значений значения VNP,k,…, VNP,k+N нарушения потенциалов в момент к отсчета до момента k+N отсчета осуществляется по следующей формуле:

Если же m-2 траектории UNP потенциалов в k-й момент отсчета ниже заданного нижнего предела yNP,min диапазона значений, то расчет отнесенного к верхнему yNP,max и нижнему yNP,min пределам диапазона значений значения VNP,k,…, VNP,k+N нарушения потенциалов в момент k отсчета до момента k+N отсчета осуществляется по следующей формуле:

При этом UT,k,…, UT,k+N - значения траекторий UNP потенциалов в момент k отсчета до момента k+N отсчета.
Полноты ради следует отметить, что если соответствующая траектория в k-й момент отсчета лежит в пределах полосы, образованной соответствующими верхним и нижним пределами диапазона значений, то соответствующее значение нарушения в момент k отсчета до момента k+N отсчета устанавливается на нуль.
Перечень ссылочных позиций
1 - вращающаяся электрическая машина
2 - преобразовательная схема для коммутации трех уровней напряжения
3 - цепь постоянного напряжения
4 - субпреобразовательная система
5 - первая коммутационная группа
6 - вторая коммутационная группа
7 - третья коммутационная группа
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2458453C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ | 2011 |
|
RU2547807C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОРОМ | 2011 |
|
RU2578165C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2000 |
|
RU2190106C2 |
| РОТОРНЫЙ НАСОС (ВАРИАНТЫ) | 2000 |
|
RU2181443C2 |
| СПОСОБ НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОФИЗИОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК СЕРДЦА | 2017 |
|
RU2651068C1 |
| СПОСОБ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ ПОЛНОЙ РАЗНОСТИ ФАЗ ПРИ ИНТЕРФЕРОМЕТРИЧЕСКИХ ИЗМЕРЕНИЯХ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1996 |
|
RU2116655C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
Изобретение относится к области эксплуатации вращающейся электрической машины. Электрическая машина соединена по фазам с содержащей цепь постоянного напряжения преобразовательной схемой для коммутации, по меньшей мере, двух уровней напряжения, причем фазы преобразовательной схемы соединяются с цепью постоянного напряжения по выбранной комбинации коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы. Для получения технического результата - уменьшения частоты коммутационных циклов силовых полупроводниковых выключателей - делается прогноз о дальнейшем поведении всей системы, а затем выбирается оптимальная комбинация коммутационных состояний на основе предыдущей выбранной комбинации коммутационных состояний и в отношении числа переходов от предыдущей выбранной комбинации коммутационных состояний к выбранной комбинации коммутационных состояний и в отношении соответствующего заданного диапазона значений крутящего момента вращающейся электрической машины, магнитного потока ее статора и потенциала на частичном выводе. Этапы способа осуществляются посредством цифрового сигнального процессора и программируемой пользователем вентильной матрицы (FPGA). 3 н. и 23 з.п. ф-лы, 3 ил.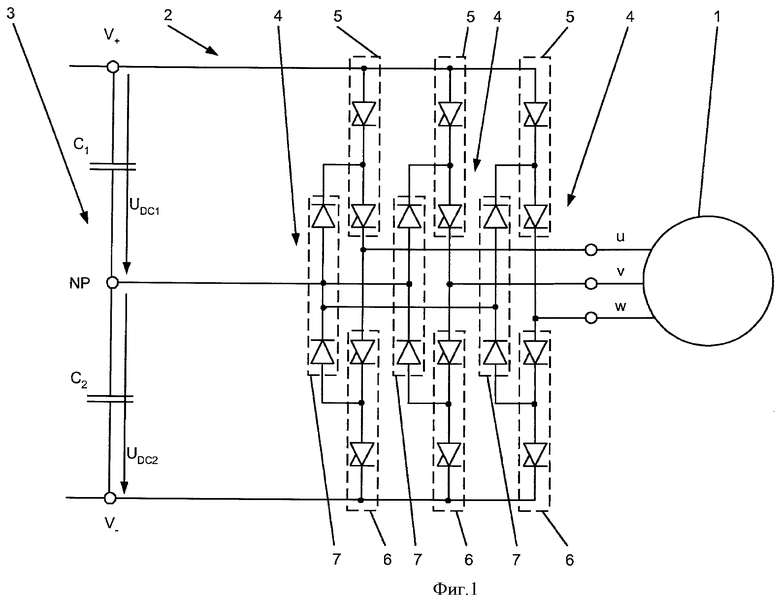
1. Способ эксплуатации вращающейся электрической машины (1), причем вращающаяся электрическая машина соединена по фазам с содержащей цепь (3) постоянного напряжения преобразовательной схемой (2) для коммутации m уровней напряжения, причем m≥2, включающий в себя следующие этапы:
a) соединение фаз (u, v, w) преобразовательной схемы (2) с цепью (3) постоянного напряжения по выбранной комбинации (SKa,k) коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы (2);
b) начиная с момента k начала отсчета для выбираемого числа N моментов отсчета: определение всех допустимых комбинаций (SKk, …, SKk+N) коммутационных состояний в каждый из N моментов отсчета, причем N≥1;
c) формирование последовательностей (SSK) коммутационных состояний для каждой определенной комбинации (SKk) коммутационных состояний в момент k начала отсчета, причем каждая последовательность (SSK) коммутационных состояний является объединением относящихся к данной комбинации (SKk) коммутационных состояний в момент k начала отсчета определенных комбинаций (SKk, …, SKk+N) коммутационных состояний N моментов отсчета,
отличающийся тем, что выбор комбинации (SKa,k) коммутационных состояний осуществляют следующими дополнительными этапами:
d) определение на этапе b) и формирование на этапе с) посредством программируемой пользователем вентильной матрицы (FPGA);
е1) расчет наборов (Ye,k, …, Ye,k+N) промежуточных значений состояний вращающейся электрической машины (1) и преобразовательной схемы (2) для момента k начала отсчета до момента k+N отсчета посредством цифрового сигнального процессора;
е2) расчет наборов (Xe,k, …, Xe,k+N) промежуточных значений состояний по последовательностям (SSK) коммутационных состояний и вычисленным наборам (Ye,k, …, Ye,k+N) промежуточных значений состояний посредством FPGA;
f) расчет для каждой из последовательностей (SSK) коммутационных состояний траектории (М) крутящего момента вращающейся электрической машины (1) и траектории (ϕ) магнитного потока ее статора посредством FPGA по вычисленным наборам (Xe,k, …, Xe,k+N) промежуточных значений состояний для момента k начала отсчета до момента (k+N)-го отсчета;
f1) если траектория (М) крутящего момента в k-й момент отсчета не выше заданного верхнего предела (yМ,mах) диапазона значений или не ниже его заданного нижнего предела (yМ,min) и если траектория (ϕ) магнитного потока статора в k-й момент отсчета не выше заданного верхнего предела (yS,max) диапазона значений или не ниже его заданного нижнего предела (yS,min), выбор комбинации (SKa,k) коммутационных состояний на следующих этапах от g) до k);
g) выбор последовательностей (SSKa) коммутационных состояний посредством FPGA, при которых соответствующая траектория (М) крутящего момента и траектория (ϕ) магнитного потока статора в (k+N)-й момент отсчета лежит в пределах соответствующего заданного диапазона значений или при которых значения (МT,k, …, МТ,k+N) соответствующей траектории (М) крутящего момента и значения (ϕT,k, …, ϕТ,k+N) соответствующей траектории (ϕ) магнитного потока статора в k-й момент отсчета до (k+N)-го момента отсчета приближаются к соответствующему заданному диапазону значений;
h) для каждой из выбранных последовательностей (SSKa) коммутационных состояний определение числа n моментов посредством FPGA, пока экстраполяция значений (МТ,k+N-1, MТ,k+N) соответствующей траектории (М) крутящего момента или значений (ϕТ,k+N-1, ϕТ,k+N) соответствующей траектории (ϕ) магнитного потока статора в (k+N-1)-й момент отсчета до (k+N)-го момента отсчета не будет лежать за пределами соответствующего заданного диапазона значений;
i) для каждой из выбранных последовательностей (SSKa) коммутационных состояний определение общего числа коммутационных переходов s соответствующих определенных комбинаций (SKk, …, SKk+N) коммутационных состояний посредством FPGA;
j) для каждой из выбранных последовательностей (SSKa) коммутационных состояний расчет коэффициента с добротности по числу n моментов и общему числу коммутационных переходов s посредством FPGA;
k) установление той определенной комбинации (SKk) коммутационных состояний в момент k начала отсчета в качестве выбранной комбинации (SKa,k) коммутационных состояний посредством FPGA, при которой коэффициент с добротности соответствующей выбранной последовательности (SSKa) коммутационных состояний наименьший;
l) если траектория (М) крутящего момента в k-й момент отсчета выше заданного верхнего предела (yМ,max) диапазона значений или ниже его заданного нижнего предела (yМ,min), расчет отнесенного к верхнему (yМ,mах) и нижнему (yМ,min) пределам диапазона значений значения (vМ,k, …, vМ,k+N) нарушения крутящего момента посредством FPGA для момента k отсчета до момента (k+N)-го отсчета, а если траектория (ϕ) магнитного потока статора в k-й момент отсчета выше заданного верхнего предела (yМ,mах) диапазона значений или ниже его заданного нижнего предела (yМ,min), расчет отнесенного к верхнему (yМ,mах) и нижнему (yМ,min) пределам диапазона значений значения (vS,k, …, vS,k+N) нарушения потока статора посредством FPGA для момента k-го отсчета до момента (k+N)-го отсчета, выбор комбинации (SKa,k) коммутационных состояний на следующих этапах m) - о);
m) для каждой последовательности (SSK) коммутационных состояний и для момента k-го отсчета до момента (k+N)-го отсчета определение максимального значения (vmax) по значениям (vM,k, …, vM,k+N) нарушения крутящего момента и значениям (vS,k, …, vS,k+N) нарушения потока статора посредством FPGA;
n) для каждой последовательности (SSK) коммутационных состояний формирование суммы (Svmax) из максимальных значений (vmax) посредством FPGA;
о) установление той определенной комбинации (SKk) коммутационных состояний в момент k начала отсчета в качестве выбранной комбинации (SKa,k) коммутационных состояний посредством FPGA, при которой сумма (Svmax) максимальных значений (vmax) наименьшая;
р) повторение этапов от а) до о), причем k=k+1.
2. Способ по п.1, отличающийся тем, что при m≥3 преобразовательная схема (2) для коммутации m уровней напряжения имеет в цепи (3) постоянного напряжения m-2 частичных выводов (NP) и на этапе f) для каждой из последовательностей (SSK) коммутационных состояний посредством FPGA дополнительно вычисляют m-2 траекторий (UNP) потенциалов на m-2 частичных выводах (NP), на этапе g) посредством FPGA выбирают последовательности (SSKa) коммутационных состояний, при которых дополнительно соответствующие m-2 траектории (UNP) потенциалов в (k+N)-й момент отсчета лежат соответственно в пределах заданного диапазона значений или при которых дополнительно значения (UNP,k, …, UNP,k+N) траекторий (UNP) потенциалов в (k+N)-й момент отсчета приближаются к соответствующему заданному диапазону значений, при этом на этапе h) для каждой из выбранных последовательностей (SSKa) коммутационных состояний посредством FPGA определяют число n моментов, пока экстраполяция значений (МT,k+N-1, МT,k+N) соответствующей траектории (М) крутящего момента, или значений (ϕT,k+N-1, ϕT,k+N) соответствующей траектории (ϕ) магнитного потока статора, или значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов в отношении (k+N-1)-го и (k+N)-го моментов отсчета не будет лежать вне соответствующего заданного диапазона значений.
3. Способ по п.1 или 2, отличающийся тем, что для экстраполяции значений (МT,k+N-1, МT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно линейную экстраполяцию.
4. Способ по п.2, отличающийся тем, что для экстраполяции значений (МT,k+N-1, МT,k+N) траектории (М) крутящего момента, значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора и значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов выбирают соответственно линейную экстраполяцию.
5. Способ по п.1 или 2, отличающийся тем, что для экстраполяции значений (МT,k+N-1, МT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно квадратичную экстраполяцию.
6. Способ по п.2, отличающийся тем, что для экстраполяции значений (MT,k+N-1, МT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно квадратичную экстраполяцию, при этом для экстраполяции значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов выбирают линейную экстраполяцию.
7. Способ по п.1 или 2, отличающийся тем, что для экстраполяции значений (МT,k+N-1, МT,k+N) траектории (М) крутящего момента выбирают линейную экстраполяцию, при этом для экстраполяции значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают квадратичную экстраполяцию.
8. Способ по п.2, отличающийся тем, что для экстраполяции значений (MT,k+N-1, MT,k+N) траектории (М) крутящего момента и значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов выбирают соответственно линейную экстраполяцию, при этом для экстраполяции значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают квадратичную экстраполяцию.
9. Способ по одному из пп.1, 2, 4, 6 и 8, отличающийся тем, что коэффициент с добротности вычисляют путем деления общего числа коммутационных переходов s на число n моментов.
10. Способ по п.1, отличающийся тем, что при m≥3 преобразовательная схема (2) для коммутации m уровней напряжения имеет в цепи (3) постоянного напряжения m-2 частичных выводов (NP) и на этапе f) для каждой из последовательностей (SSK) коммутационных состояний посредством FPGA дополнительно вычисляют m-2 траекторий (UNP) потенциалов на m-2 частичных выводах (NP), если m-2 траектории (UNP) потенциалов в k-й момент отсчета выше заданного верхнего предела (yNP,mах) или ниже заданного нижнего предела (yNP,min) диапазона значений, то на этапе 1) посредством FPGA вычисляют отнесенное к верхнему (yNP,mах) и нижнему (yNP,min) пределам диапазона значений значение (vNP,k, …, vNP,k+N) нарушения потенциалов в момент k отсчета до момента k+N отсчета для каждой траектории (UNP) потенциала, при этом на этапе m) для каждой последовательности (SSK) коммутационных состояний и в момент k отсчета до момента k+N отсчета максимальное значение (vmax) определяют посредством FPGA дополнительно по значениям (vNP,k, …, vNP,k+N) нарушения потенциалов.
11. Способ по п.1 или 10, отличающийся тем, что если траектория (М) крутящего момента в k-й момент отсчета превышает заданный верхний предел (yM,mах) диапазона значений, то расчет отнесенного к верхнему (yM,mах) и нижнему (yM,min) пределам диапазона значений значения (vM,k, …, vM,k+N) нарушения крутящего момента в момент k отсчета до момента k+N отсчета осуществляют по следующей формуле:

при этом если траектория (М) крутящего момента в k-й момент отсчета ниже заданного нижнего предела (yM,min) диапазона значений, то расчет отнесенного к верхнему (yM,mах) и нижнему (yM,min) пределам диапазона значений значения (vM,k, …, vM,k+N) нарушения крутящего момента в момент k отсчета до момента k+N отсчета осуществляется по следующей формуле:

причем MT,k, …, MT,k+N - значения траектории М крутящего момента в момент k отсчета до момента k+N отсчета.
12. Способ по п.11, отличающийся тем, что если траектория (ϕ) магнитного потока статора в k-й момент отсчета превышает заданный верхний предел (yS,max) диапазона значений, то расчет отнесенного к верхнему (YS,max) и нижнему (yS,min) пределам диапазона значений значения (vS,k, …, VS,k+N) нарушения крутящего момента в момент k отсчета до момента k+N отсчета осуществляют по следующей формуле:

при этом если траектория (ϕ) магнитного потока статора в k-й момент отсчета ниже заданного нижнего предела (yS,min) диапазона значений, то расчет отнесенного к верхнему (yS,max) и нижнему (yS,min) пределам диапазона значений значения (vS,k, …, vS,k+N) нарушения крутящего момента в момент k отсчета до момента k+N отсчета осуществляют по следующей формуле:

причем ϕT,k, …, ϕT,k+N - значения траектории (ϕ) магнитного потока статора в момент k отсчета до момента k+N отсчета.
13. Способ по п.10, отличающийся тем, что если m-2 траектории (UNP) потенциалов в k-й момент отсчета превышают заданный верхний предел (yNP,max) диапазона значений, то расчет отнесенного к верхнему (yNP,max) и нижнему (yNP,min) пределам диапазона значений значения (vNP,k, …, vNP,k+N) нарушения потенциалов в момент k отсчета до момента k+N отсчета осуществляют по следующей формуле:

при этом если m-2 траектории (UNP) потенциалов в k-й момент отсчета ниже заданного нижнего предела (yNP,min) диапазона значений, то расчет отнесенного к верхнему (yNP,max) и нижнему (yNP,min) пределам диапазона значений значения (vNP,k, …, vNP,k+N) нарушения потенциалов в момент k отсчета до момента k+N отсчета осуществляется по следующей формуле:

причем UT,k, …, UT,k+N - значения траекторий (UNP) потенциалов в момент k отсчета до момента k+N отсчета.
14. Способ эксплуатации вращающейся электрической машины (1), причем вращающаяся электрическая машина соединена по фазам с содержащей цепь (3) постоянного напряжения преобразовательной схемой (2) для коммутации m уровней напряжения, причем m≥2, включающий в себя следующие этапы:
а) соединение фаз (u, v, w) преобразовательной схемы (2) с цепью (3) постоянного напряжения по выбранной комбинации (SKa,k) коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы (2);
отличающийся тем, что выбор комбинации (SKa,k) коммутационных состояний осуществляют на следующих этапах:
q) формирование посредством FPGA последовательности (SSK) коммутационных состояний для предыдущей выбранной комбинации (SKa,k-1) коммутационных состояний, причем последовательность (SSK) коммутационных состояний является объединением N предыдущих выбранных комбинаций (SKa,k-1) коммутационных состояний, установление предыдущей выбранной комбинации (SKa,k-1) коммутационных состояний посредством FPGA в качестве выбранной комбинации (SKa,k) коммутационных состояний;
f) расчет для каждой из последовательностей (SSK) коммутационных состояний траектории (М) крутящего момента вращающейся электрической машины (1) и траектории (ϕ) магнитного потока ее статора посредством FPGA по вычисленным наборам (Xe,k, …, Хе,k+N) промежуточных значений состояний для момента k начала отсчета до момента k+N отсчета, причем значения (МT,k, …, МT,k+N) соответствующей траектории (М) крутящего момента и значения (ϕT,k, …, ϕT,k+N) соответствующей траектории (ϕ) магнитного потока статора в k-й момент отсчета до (k+N)-го момента отсчета лежат в пределах соответствующего заданного диапазона значений.
15. Способ по п.14, отличающийся тем, что для экстраполяции значений (MT,k+N-1, MT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно линейную экстраполяцию.
16. Способ по п.14, отличающийся тем, что для экстраполяции значений (МT,k+N-1, MT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно квадратичную экстраполяцию.
17. Способ по п.14, отличающийся тем, что для экстраполяции значений (МT,k+N-1, МT,k+N) траектории (М) крутящего момента выбирают линейную экстраполяцию, при этом для экстраполяции значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают квадратичную экстраполяцию.
18. Способ по любому из пп.14-17, отличающийся тем, что коэффициент с добротности вычисляют путем деления общего числа коммутационных переходов s на число n моментов.
19. Способ эксплуатации вращающейся электрической машины (1), причем вращающаяся электрическая машина соединена по фазам с содержащей цепь (3) постоянного напряжения преобразовательной схемой (2) для коммутации m уровней напряжения, причем m≥2, включающий в себя следующие этапы:
а) соединение фаз (u, v, w) преобразовательной схемы (2) с цепью (3) постоянного напряжения по выбранной комбинации (SKa,k) коммутационных состояний силовых полупроводниковых выключателей преобразовательной схемы (2);
отличающийся тем, что выбор комбинации (SKa,k) коммутационных состояний осуществляют на следующих этапах:
q) формирование посредством FPGA последовательности (SSK) коммутационных состояний для предыдущей выбранной комбинации (SKa,k-1) коммутационных состояний, причем последовательность (SSK) коммутационных состояний является объединением N предыдущих выбранных комбинаций (SKa,k-1) коммутационных состояний, установление предыдущей выбранной комбинации (SKa,k-1) коммутационных состояний посредством FPGA в качестве выбранной комбинации (SKa,k) коммутационных состояний;
f) расчет для каждой из последовательностей (SSK) коммутационных состояний траектории (М) крутящего момента вращающейся электрической машины (1) и траектории (ϕ) магнитного потока ее статора посредством FPGA по вычисленным наборам (Xe,k, …, Xe,k+N) промежуточных значений состояний для момента k начала отсчета до момента k+N отсчета, причем значения (МT,k, …, МT,k+N) соответствующей траектории (М) крутящего момента, значения (ϕT,k, …, ϕT,k+N) соответствующей траектории (ϕ) магнитного потока статора и значения (UNP,k, …, UNP,k+N) соответствующих m-2 траекторий (UNP) потенциалов в k-й момент отсчета до (k+N)-го момента отсчета лежат в пределах соответствующего заданного диапазона значений.
20. Способ по п.19, отличающийся тем, что для экстраполяции значений (MT,k+N-1, МT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно линейную экстраполяцию.
21. Способ по п.19, отличающийся тем, что для экстраполяции значений (MT,k+N-1, МT,k+N) траектории (М) крутящего момента, значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора и значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов выбирают соответственно линейную экстраполяцию.
22. Способ по п.19, отличающийся тем, что для экстраполяции значений (MT,k+N-1, МТ,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕТ,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно квадратичную экстраполяцию.
23. Способ по п.19, отличающийся тем, что для экстраполяции значений (MT,k+N-1, МT,k+N) траектории (М) крутящего момента и значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают соответственно квадратичную экстраполяцию, при этом для экстраполяции значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов выбирают линейную экстраполяцию.
24. Способ по п.19, отличающийся тем, что для экстраполяции значений (MT,k+N-1, МT,k+N) траектории (М) крутящего момента выбирают линейную экстраполяцию, при этом для экстраполяции значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают квадратичную экстраполяцию.
25. Способ по п.19, отличающийся тем, что для экстраполяции значений (МT,k+N-1, МT,k+N) траектории (М) крутящего момента и значений (UNP,k+N-1, UNP,k+N) m-2 траекторий (UNP) потенциалов выбирают соответственно линейную экстраполяцию, при этом для экстраполяции значений (ϕT,k+N-1, ϕT,k+N) траектории (ϕ) магнитного потока статора выбирают квадратичную экстраполяцию.
26. Способ по любому из пп.19-25, отличающийся тем, что коэффициент с добротности вычисляют путем деления общего числа коммутационных переходов s на число n моментов.
| Пневматический валкователь фрезерного торфа | 1989 |
|
SU1670135A1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |

