Изобретение относится к технологическому оборудованию для монтажа радиоэлектронной .аппаратуры, в частности к устройствам ориентации и поштучной подачи на позиции обработки микроминиатюрных изделий, и может быть использовано для производства микросхем в условиях технологических сред и в вакууме.
Цель изобретения - расширение эксплуатационных возможностей в особочи- стых технологических средах и упрощение конструкции.
На чертеже представлено трехкоорди- натное устройство для прецизионного перемещения изделий, общий вид.
Устройство состоит из двух кареток, рабочего стола и независимых приводов перемещения по осям X и Y, расположенных
одна к другой под прямым углом, и поворотного устройства.
Привод перемещения по оси X содержит каретку 1, к которой жестко прикреплены две герметичные, параллельные, соединенные трубопроводом гибкие трубки 2 и 3 эллиптического сечения, связанные с узлом регулирования давления, состоящим изсильфона4. Ктрубкам прикреплен столик 5 для перемещения по оси X. Сильфон 4 связан с источником внешнего перемещения, находящимся вне рабочей среды или вакуума.
Привод перемещения по оси Y выпол- нен аналогично и состоит из каретки 6, прикрепленной к столику 5, трубок 7 и 8 и припаянного к ним рабочего стола 9 для перемещения по оси Y. На рабочем столе находится перемещаемое изделие.
N) VI О
Поворотное устройство состоит из винтовой, герметичной, упругодеформируемой, заполненной жидкостью трубки 10 эллиптического сечения, жестко закрепленной торцами к фланцу 11 и каретке 6. Узел регулирования давления во всех случаях одинаков. Во всех случаях сильфом и трубки, соединенные трубопроводом, заполнены жидкостью.
Устройство работает следующим обра- зом.
При сжатии сильфона 4 от внешнего источника перемещения повышается давление внутри системы, состоящей из упругодеформируемых трубок 2 и 3, трубоп- ровода и сильфона 4. Увеличение давления внутри системы вызывает изменение геометрической формы трубок 2 и 3 эллиптического сечения, при этом уменьшается большая ось эллипса и увеличивается малая, параллельная оси X, что вызывает пере- мещение по оси X. Поскольку жидкость малосжимаема, то все усилие идет на изменение геометрической формы трубок. Ана- логичным образом при повышении давления внутри трубок 7 и 8 происходит перемещение по оси Y. Перемещение по угловой координате достигается путем повышения давления внутри винтовой, упругодеформируемойтрубки10эллиптического сечения, которая начинает раскручиваться. При снятии давления система возвращается в исходное положение.
Последовательность, направление и величина перемещения по каждой координате могут задаваться каким-либо программным устройством, например ЭВМ. Предлагаемое устройство дает возможность незави
0
5 0 5 0
5
симого перемещения по всем трем координатам.
Ф о рм ул а изобретен ия1.Трехкоординатнбе устройство для прецизионного перемещения изделий, содержащее рабочий стол, приводы для перемещения соответствующих кареток по координатам X и Y и поворотный механизм с приводом, отличающееся тем, что, с целью расширения эксплуатационных возможностей в особочистых технологических средах и упрощения конструкции, приводы перемещения по осям X и Y выполнены в виде двух пар параллельных трубчатых элементов эллиптического сечения, герметичных, заполненных жидкостью и соединенных с узлом регулирования давления посредством трубопровода, а каретка каждой координаты закреплена на боковых поверхностях каждой пары привода,соответствующей координаты.
2.Устройство по п.1. о т л и ч а ю щ е е- с я тем, что привод поворотного механизма выполнен в виде винтовой, упругодеформируемой трубки эллиптического сечения, герметичной, заполненной жидкостью, соединенной с узлом регулирования давления.
3.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что длина герметичных трубчатых элементов эллиптического сечения в приводах перемещения по координатам X и Y превышает максимальную ширину в шесть- десять раз.
4.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что гибкие, герметичные трубчатые элементы в приводах перемещения по координатам X и Y выполнены с ромбовидным сечением.
11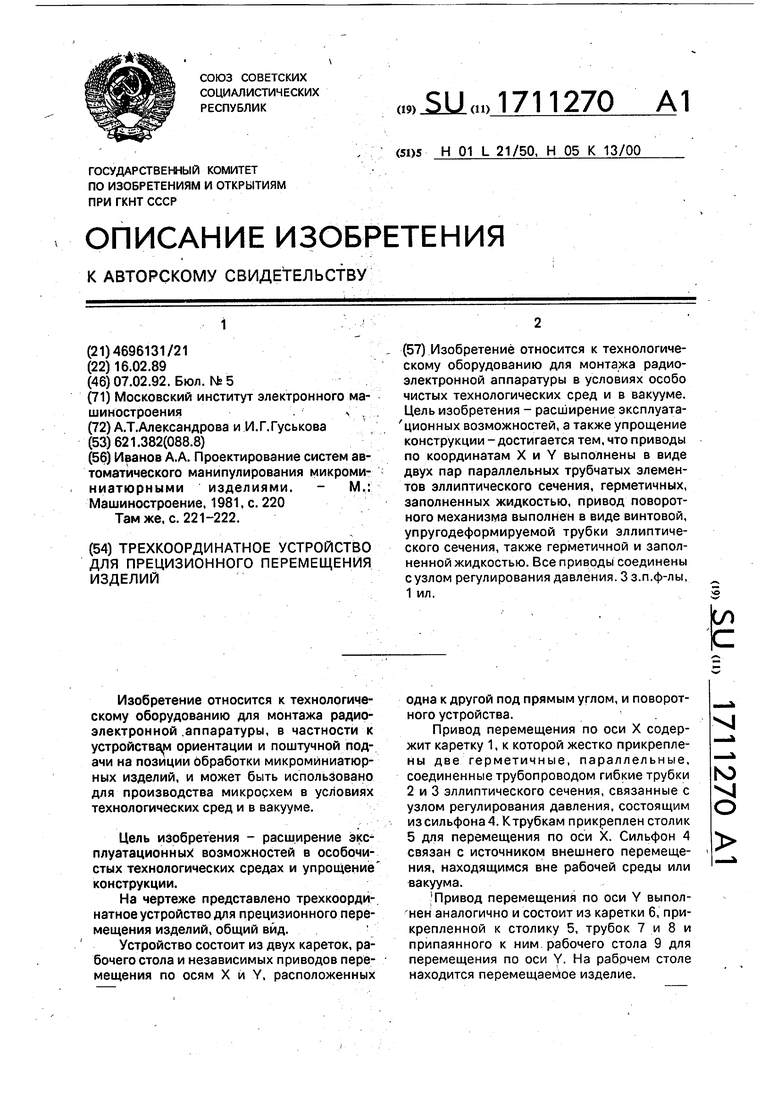

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ И ПРИВОД ВРАЩЕНИЯ ДЛЯ НЕГО | 2001 |
|
RU2206913C2 |
| ПЯТИКООРДИНАТНАЯ УСТАНОВКА ДЛЯ ТРЕХМЕРНОЙ ПРЕЦИЗИОННОЙ ГИДРОСТРУЙНОЙ РЕЗКИ | 2010 |
|
RU2453417C2 |
| Натекатель | 1988 |
|
SU1566155A1 |
| Машина для гидравлического формования сильфонов | 1977 |
|
SU704698A1 |
| Металлорежущий станок | 1980 |
|
SU867521A1 |
| Устройство для измерения температуры | 1981 |
|
SU1052888A1 |
| ВАКУУМНЫЙ ЗАТВОР | 1996 |
|
RU2109196C1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| Регулятор скорости вращения | 1983 |
|
SU1116418A1 |
| Шлифовальный станок с числовым программным управлением | 1985 |
|
SU1316795A1 |

Изобретение относится к технологическому оборудованию для монтажа радиоэлектронной аппаратуры в условиях особо чистых технологических сред и в вакууме. Цель изобретения - расширение эксплуата- ционных возможностей, а также упрощение конструкции -достигается тем, что приводы по координатам X и Y выполнены в виде двух пар параллельных трубчатых элементов эллиптического сечения, герметичных, заполненных жидкостью, привод поворотного механизма выполнен в виде винтовой, упругодеформируемой трубки эллиптического сечения, также герметичной и заполненной жидкостью. Все приводы соединены с узлом регулирования давления. Зз.п.ф-лы, 1 ил. fe
| Иванов А.А | |||
| Проектирование систем автоматического манипулирования микроми- ниатюрными изделиями | |||
| - М.: Машиностроение, 1981, с | |||
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
