Настоящее изобретение относится к системе дозаправки в воздухе со шлангом и стыковочным гнездом.
Как известно, системы дозаправки в воздухе с шлангом и стыковочным гнездом содержат: летательный аппарат-танкер, оборудованный шлангом дозаправки, оснащенным на своем свободном конце стыковочным гнездом; и топливоприемный летательный аппарат, оборудованный жесткой штангой, сконструированной для присоединения к стыковочному гнезду, чтобы предоставлять летательному аппарату-танкеру возможность дозаправлять приемный летательный аппарат.
Процедура, применяемая традиционными системами дозаправки с шлангом и стыковочным гнездом, по существу содержит: этап позиционирования летательного аппарата-танкера, на котором летательный аппарат-танкер придерживается предопределенного курса, обычно прямой линии, на постоянной скорости от 200 до 350 узлов, в зависимости от привлеченного летательного аппарата, с тем чтобы перемещаться насколько возможно предсказуемо; этап сближения или стыковки, на котором пилот приемного летательного аппарата перемещает летательный аппарат в зону приема, чтобы стыковаться с летательным аппаратом-танкером; этап соединения стыковочного гнезда-штанги, на котором пилот приемного летательного аппарата вручную управляет летательным аппаратом, чтобы совместить штангу со стыковочным гнездом, и перемещает летательный аппарат в положение для присоединения штанги к стыковочному гнезду; этап дозаправки, на котором топливо передается с летательного аппарата-танкера на приемный летательный аппарат через тракт дозаправки, в частности, стыковочное гнездо-штанга; и этап расцепления стыковочного гнезда-штанги.
Вышеприведенная процедура вызывает многочисленные технические проблемы.
Во-первых, успешное соединение стыковочного гнезда-штанги, и время, занимаемое для его совершения, зависят от различных факторов, таких как: погодные условия; видимость; а также уровень стресса и навык пилотов приемного летательного аппарата при выполнении ручного маневра стыковки/соединения.
Во-вторых, соединение стыковочного гнезда-штанги успешно только тогда, когда относительная скорость двух летательных аппаратов, в течение последних нескольких секунд до соединения, находится в диапазоне между 2 и 5 узлами. Фактически ниже 2 узлов штанга не может присоединяться к стыковочному гнезду; тогда как скорости выше 5 узлов могут иметь следствием рискованную стыковку танкера и приемного летательного аппарата.
В системах дозаправки описанного типа соединение стыковочного гнезда-штанги поэтому является критической операцией, которая, в дополнение к задействованным запасам по отказам, является источником тяжелого стресса у пилотов, выполняющих маневр, и не предоставляют возможность для расчета времени заправки, что, очевидно, ставит серьезные проблемы, когда вся флотилия должна быть дозаправлена в пределах максимального суммарного времени, ассоциативно связанного с дальностью полета при имеющемся запасе топлива летательного аппарата во флотилии.
Цель настоящего изобретения состоит в том, чтобы предоставить систему дозаправки в воздухе, сконструированную для устранения вышеприведенных недостатков.
Согласно настоящему изобретению предложена вспомогательная система дозаправки в воздухе, которая заявлена в пункте 1 формулы изобретения, и предпочтительно, хотя и необязательно, в любом одном из пунктов формулы изобретения, непосредственно или опосредованно зависящих от пункта 1 формулы изобретения.
Неограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера со ссылкой на прилагаемые чертежи, на которых:
фиг.1 показывает схему вспомогательной системы дозаправки в воздухе в соответствии с доктринами настоящего изобретения;
фиг.2 показывает схему системы содействия соединению стыковочного гнезда-штанги, образующую часть вспомогательной системы дозаправки в воздухе на фиг.1;
фиг.3 показывает схематический вид сбоку в частичном разрезе с частями, удаленными для разборчивости, сборки управления стыковочным гнездом системы по фиг.1;
фиг.4 показывает схематический вид спереди в частичном разрезе с частями, удаленными для разборчивости, сборки управления стыковочным гнездом по фиг.3;
фиг.5 показывает схему одного из примеров пользовательского интерфейса системы содействия соединению стыковочного гнезда-штанги по фиг.2;
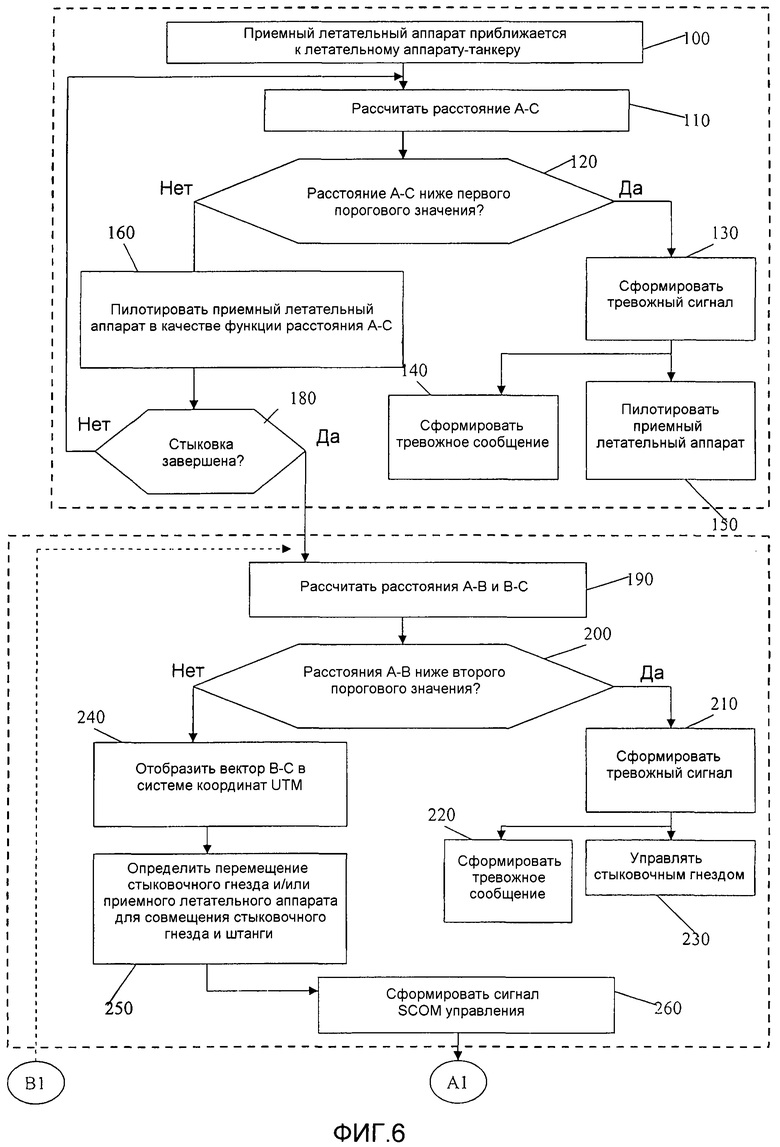
фиг.6 и 7 показывают блок-схему последовательности операций соединения стыковочного гнезда-штанги, выполняемых вспомогательной системой дозаправки в воздухе по фиг.1;
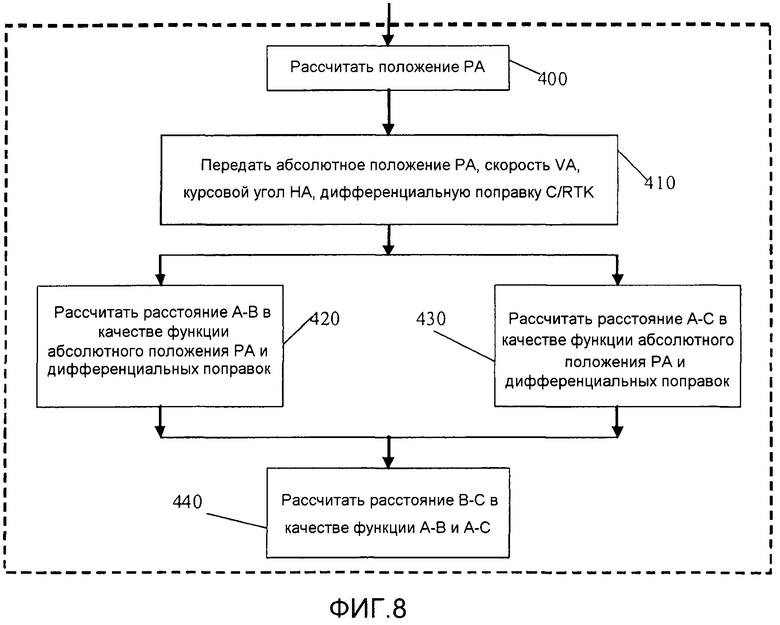
фиг.8 показывает блок-схему последовательности операций расчетов дифференциального расстояния, выполняемых системой содействия соединению стыковочного гнезда-штанги;
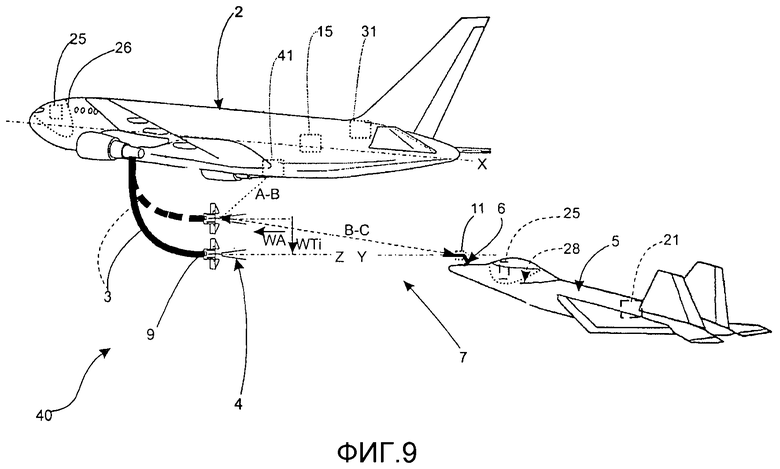
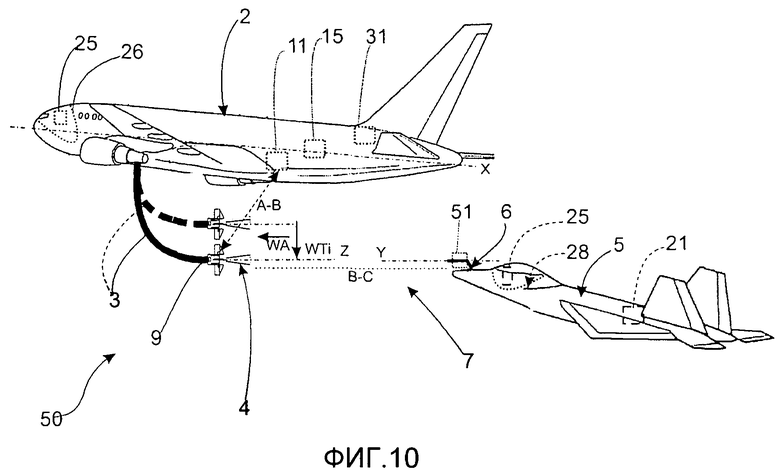
фиг.9 и 10 показывают схемы двух вариантов вспомогательной системы дозаправки в воздухе.
Номер 1 на фиг.1 указывает как единое целое вспомогательную систему дозаправки в воздухе, содержащую летательный аппарат-топливный танкер 2, оборудованный топливным шлангом 3, который тянется от летательного аппарата-танкера 2, так что в полете оконечная часть шланги 3 располагается по существу параллельно продольной оси Х летательного аппарата-танкера 2, и присоединен на своем свободном конце к стыковочному гнезду 4.
Вспомогательная система 1 дозаправки в воздухе также содержит топливоприемный летательный аппарат 5, оборудованный жесткой штангой 6, которая предпочтительно, хотя и не обязательно выступает вдоль продольной оси Z из передней части фюзеляжа приемного летательного аппарата 5, и ему придана форма, чтобы соединяться со стыковочным гнездом 4 для предоставления летательному аппарату-танкеру 2 возможности снабжать приемный летательный аппарат 5 требуемым количеством топлива.
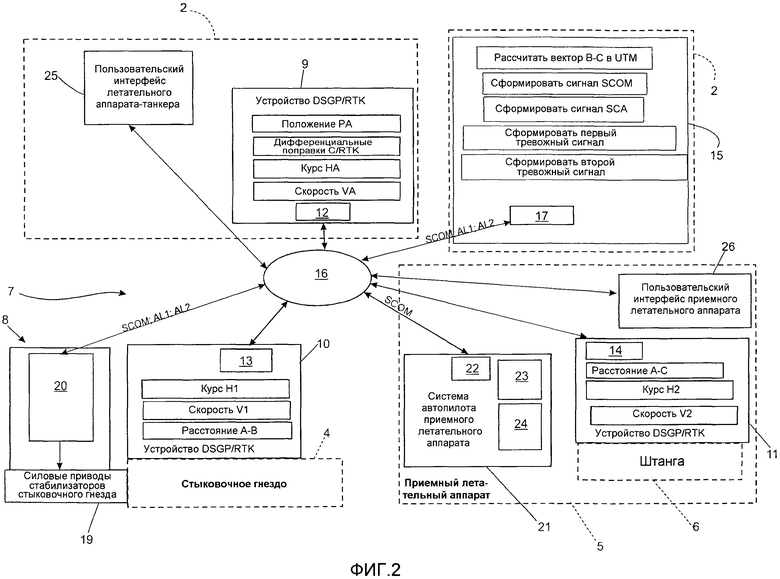
В примере по фиг.1 и 2, система 1 дозаправки содержит систему 7 содействия соединению стыковочного гнезда-штанги, сконфигурированную для определения расстояния между стыковочным гнездом 4 и штангой 6; расстояния между летательным аппаратом- танкером 2 и стыковочным гнездом 4; расстояния между летательным аппаратом-танкером 2 и приемным летательным аппаратом 5; и смещения стыковочного гнезда 4 и/или приемного летательного аппарата 5, необходимого для достижения соединения стыковочного гнезда-штанги, в качестве функции трех расстояний.
В примере по фиг.1 система 7 содействия соединению стыковочного гнезда-штанги содержит три модуля позиционирования: один, установленный на летательный аппарат-танкер 2, один внутри стыковочного гнезда 4 и один, установленный на летательный аппарат 5, предпочтительно, но не обязательно, на штанге 6.
В варианте осуществления по фиг.1 один из трех модулей позиционирования содержит ведущий модуль 9 дифференциального спутникового позиционирования, сконфигурированный для определения своего собственного абсолютного положения; а другие два модуля позиционирования содержат соответственные ведомые модули 10, 11 дифференциального спутникового позиционирования, каждый сконфигурирован для определения своего собственного расстояния по отношению к ведущему модулю 9 дифференциального спутникового позиционирования.
В показанном примере ведущий модуль 9 дифференциального спутникового позиционирования предназначен для определения и передачи своего собственного мгновенного абсолютного положения РА и дифференциальной поправки C-RTK (оба подробно описаны ниже); а каждый ведомый модуль 10, 11 дифференциального спутникового позиционирования предназначен для приема абсолютного положения РА и дифференциальной поправки C-RTK и, соответственно, определяет свое собственное расстояние по отношению к ведущему модулю 9 дифференциального спутникового позиционирования.
Система 7 содействия соединению стыковочного гнезда -штанги также предназначена для управления смещением стыковочного гнезда 4 в качестве функции расстояний, определенных ведомыми модулями 10, 11 дифференциального спутникового позиционирования.
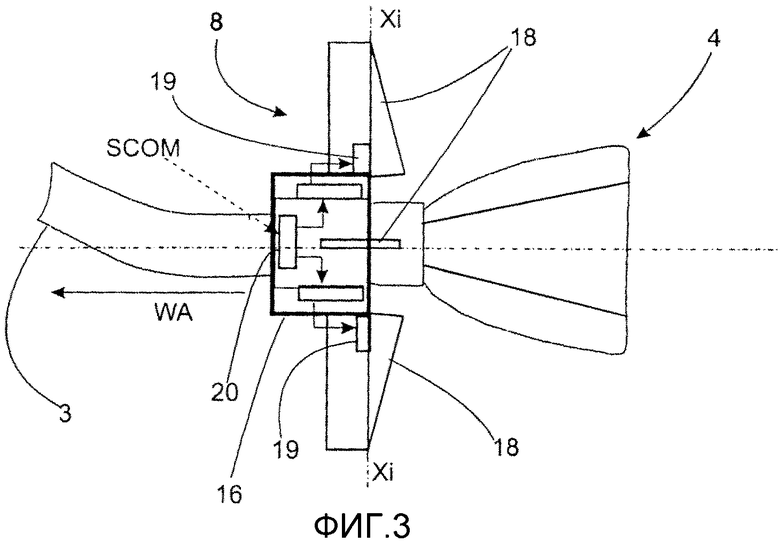
Система 7 содействия соединению стыковочного гнезда-штанги также содержит сборку 8 управления стыковочным гнездом, которая предпочтительно, хотя и не обязательно, установлена на свободный конец шланга 3 (как в примере по фиг.3) или интегрирована в стыковочное гнездо 4 (в непоказанном варианте), и предусматривает смещение стыковочного гнезда 4, по команде, в одном или более направлений, по существу поперек направления WA буксировки/движения стыковочного гнезда 4.
Ведущий модуль 9 дифференциального спутникового позиционирования содержит устройство спутникового позиционирования DGPS/RTK (дифференциальной глобальной системы позиционирования/кинематики реального времени), предназначенное для непрерывного определения: своего собственного абсолютного положения РА в пространстве в показателях широты, долготы и высоты над уровнем моря; своей собственной скорости движения VA; и своего собственного курсового угла НА.
В связи с вышеприведенным, должно быть указано, что в примере по фиг.1 абсолютное положение РА, скорость VA и курсовой угол НА, измеряемые устройством спутникового позиционирования DGPS/RTK, ассоциативно связаны с летательным аппаратом-танкером 2.
Устройство спутникового позиционирования DGPS/RTK ведущего модуля 9 дифференциального спутникового позиционирования реализует алгоритм RTK (кинематики реального времени), который определяет дифференциальную поправку C-RTK, которая должна быть произведена в отношении измерения спутниковой системы GPS.
Алгоритм RTK, реализуемый устройством спутникового позиционирования DGPS/RTK ведущего модуля 9 дифференциального спутникового позиционирования, известен, а потому подробно не описывается, за исключением состояния, в котором дифференциальная поправка C-RTK соответствует поправкам, которые должны быть произведены в отношении СРМ (измерения фазы несущей) спутникового сигнала, применяемого устройством спутникового позиционирования DGPS/RTK для расчета абсолютного положения РА.
Также должно быть указано, что устройство спутникового позиционирования DGPS/RTK ведущего модуля 9 дифференциального спутникового позиционирования традиционно предназначен, как подробно пояснено ниже, для определения своего собственного положения РА и поправки C-RTK посредством вычислительного алгоритма, пригодного для мобильной, в противоположность стационарной, базы позиционирования. В предложенном решении, фактически, устройство спутникового позиционирования DGPS/RTK установлено на движущемся объекте, в этом случае, соответствующем летательному аппарату-танкеру 2, значит, ведущий модуль 9 дифференциального спутникового позиционирования предназначен для реализации вычислительного алгоритма, допускающего принятие во внимание перемещения объекта, на котором он установлен.
Ведущий модуль 9 дифференциального спутникового позиционирования также предназначен для передачи абсолютного положения РА, скорости VA, курсового угла НА и дифференциальной поправки C-RTK посредством модуля 12 приемопередатчика.
Ведомый модуль 10 дифференциального спутникового позиционирования в стыковочном гнезде содержит устройство спутникового позиционирования DGPS/RTK (не показано), предназначенное для приема абсолютного положения РА, скорости VA, курсового угла НА и дифференциальной поправки C-RTK посредством модуля 13 приемопередатчика.
Как пояснено ниже, ведомый модуль 10 дифференциального спутникового позиционирования предназначен для определения своего собственного положения по отношению к абсолютному положению РА ведущего модуля 9 дифференциального спутникового позиционирования.
В показанном примере ведомый модуль 10 дифференциального спутникового позиционирования предназначен для определения своего собственного расстояния А-В по отношению к ведомому модулю 9 дифференциального спутникового позиционирования на основании абсолютного положения РА и дифференциальной поправки C-RTK, обработанных ведущим модулем 9 дифференциального спутникового позиционирования.
Соответственно, ведомый модуль 10 дифференциального спутникового позиционирования содержит вычислительный блок (не показан), который принимает относительное положение, определенное устройством спутникового позиционирования DGPS/RTK, а также абсолютное положение РА и дифференциальную поправку С- RTK, переданные ведущим модулем 9 дифференциального спутникового позиционирования, и соответственно определяет расстояние А-В между ведущим модулем 9 дифференциального спутникового позиционирования и ведомым модулем 10 дифференциального спутникового позиционирования.
Ведомый модуль 10 дифференциального спутникового позиционирования также предназначен для определения и передачи своего собственного относительного положения; своего собственного расстояния А-В, скорректированного на основе дифференциальной поправки C-RTK; своей собственной скорости V1; и своего собственного курсового угла HI. Должно быть указано, что скорость V1 и курсовой угол HI соответствуют скорости и курсовому углу объекта, на котором установлен ведомый модуль 10 дифференциального спутникового позиционирования, то есть стыковочного гнезда 4.
Ведомый модуль 11 дифференциального спутникового позиционирования, который, в показанном примере, расположен на летательном аппарате 5, содержит устройство спутникового позиционирования DGPS/RTK, предназначенное для приема абсолютного положения РА, скорости VA, курсового угла НА и дифференциальной поправки C-RTK посредством модуля 14 приемопередатчика и для определения своего собственного положения по отношению к ведущему модулю 9 дифференциального спутникового позиционирования.
Более точно, как пояснено ниже, ведомый модуль 11 дифференциального спутникового позиционирования предназначен для определения и передачи своего собственного положения и расстояния А-С по отношению к ведущему модулю 9 дифференциального спутникового позиционирования на основе абсолютного положения РА и дифференциальной поправки C-RTK.
Соответственно, ведомый модуль 11 дифференциального спутникового позиционирования содержит вычислительный блок (не показан), который принимает относительное положение, определенное устройством спутникового позиционирования DGPS/RTK, а также абсолютное положение РА и дифференциальную поправку С-RTK, переданные ведущим модулем 9 дифференциального спутникового позиционирования, и соответственно определяет расстояние А-С между ведущим модулем 9 дифференциального спутникового позиционирования и ведомым модулем 11 дифференциального спутникового позиционирования.
Ведомый модуль 11 дифференциального спутникового позиционирования также предназначен для определения и передачи своей собственной скорости V2 и курсового угла Н2, которые соответствуют скорости и курсовому углу штанги б/приемного летательного аппарата 5.
Система 7 содействия соединению стыковочного гнезда-штанги также содержит вычислительное устройство 15, которое сконфигурировано для приема расстояний А-В и А-С посредством модуля 17 приемопередатчика и для определения расстояния В-С между стыковочным гнездом и штангой с использованием алгоритма геометрического расчета и на основе расстояний А-В и А-С.
В примере по фиг.1 вычислительное устройство 15 предпочтительно, хотя и не обязательно, установлено на летательном аппарате-танкере 2 и предназначено для обмена информацией посредством модуля 17 приемопередатчика с каждым из модулей 9, 10, 11 дифференциального спутникового позиционирования через систему 16 связи. В показанном примере модули 12, 13, 14, 17 приемопередатчика преимущественно могут быть устройствами радиочастотного приемопередатчика для передачи/приема радиочастотных сигналов, содержащих в себе информацию, описанную выше.
В связи с вышеприведенным, должно быть указано, что, в непоказанном варианте осуществления, вычислительное устройство 15, в противоположность установке на летательном аппарате-танкере 2, может быть без труда установлено в штанге 6 или на приемном летательном аппарате 5, либо в стыковочном гнезде 4; а модули 9, 10, 11 дифференциального спутникового позиционирования могут быть установлены на летательном аппарате-танкере 2, стыковочном гнезде 4 и штанге в любой компоновке, иной, чем описанная. Другими словами, ведущий модуль 9 дифференциального спутникового позиционирования, то есть модуль, рассчитывающий абсолютное положение РА и дифференциальную поправку C-RTK, может быть установлен на приемном летательном аппарате 5, а модули 10 и 11 дифференциального спутникового позиционирования могут быть установлены на летательном аппарате-танкере 2 и в стыковочном гнезде 4.
В одном из вариантов осуществленя, ведущий модуль 9 дифференциального спутникового позиционирования установлен в стыковочном гнезде 4, а модули 10 и 11 дифференциального спутникового позиционирования установлены на летательном аппарате-танкере 2 и приемном летательном аппарате 5.
В связи с вышеприведенным, должно быть указано, что в каждом из вышеприведенных трех конфигураций установки ведущего и ведомого модулей дифференциального спутникового позиционирования на летательном аппарате-танкере/стыковочном гнезде/приемном летательном аппарате, вычислительное устройство 15 принимает два расстояния, рассчитанные двумя ведомыми модулями дифференциального спутникового позиционирования, и соответственно рассчитывает третье расстояние с использованием расчета на основании эвклидовой геометрии.
Еще один важный момент, который следует указать, состоит в том, что использование описанных устройств спутникового позиционирования DGPS/RTK имеет значительное преимущество, в отличие от традиционных GPS-устройств с точностью приблизительно в один метр, получения измерений расстояния с точностью приблизительно в один сантиметр, которая крайне важна для автоматического присоединения штанги 6 к стыковочному гнезду 4.
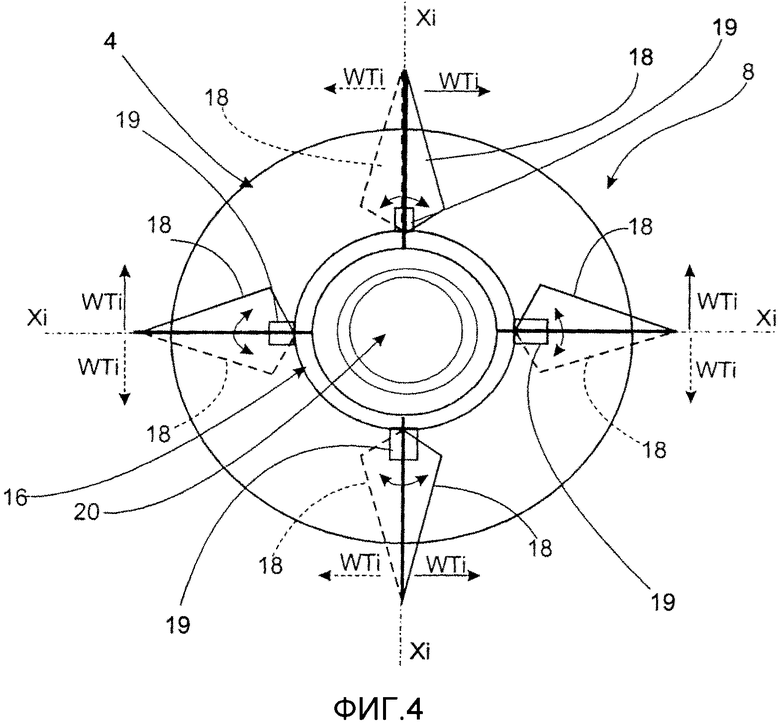
В вариантах осуществления по фиг.3 и 4, сборка 8 управления стыковочным гнездом содержит корпус 16, который плотно прилегает к стыковочному гнезду 4 или к оконечной части шланга 3 (как показано на фиг.3); некоторое количество отклоняющих стабилизаторов 18, каждый из которых проходит радиально от корпуса 16 и посажен в корпус, чтобы поворачиваться вокруг соответственной оси вращения Xi и вырабатывать, на стыковочном гнезде 4 в полете, силу WTi поперек оси вращения Xi; и некоторое количество силовых приводов 19, каждый из которых плотно посажен в корпус 16 и на стабилизатор, чтобы поворачивать стабилизатор вокруг оси вращения Xi.
Более точно, в примере, схематически показанном на фиг.3 и 4; корпус 16 является по существу цилиндрическим и предназначен для плотной посадки на оконечную часть шланга 3; и отклоняющие стабилизаторы 18 выступают из корпуса 16 для формирования по существу крестообразной конструкции. Два горизонтальных стабилизатора 18 поворачиваются вокруг соответственных осей Xi для выработки поперечной силы WTi, чтобы посредством таковой перемещать стыковочное гнездо 4 вверх или вниз; а два вертикальных стабилизатора 18 поворачиваются вокруг соответственных осей Xi для выработки поперечной силы WTi, чтобы посредством таковой перемещать стыковочное гнездо 4 в обе стороны в по существу горизонтальном направлении.
Сборка 8 управления стыковочным гнездом также содержит модуль 20 электронного управления, который предназначен для приема сигнала 3COM управления через модуль приемопередатчика, и подает команду поворота стабилизаторов 18 силовыми приводами 19 на основе сигнала 3COM управления для перемещения стыковочного гнезда 4.
В связи с вышеприведенным, должно быть указано, что модуль 20 электронного управления предпочтительно, хотя и не обязательно, предназначен для управления поворотом стабилизаторов 18 на основе сигнала 3COM управления, а также на основе сигнала ускорения из инерциального датчика (не показан), в частности, набора трех акселерометров на стыковочном гнезде 4.
Вычислительное устройство 15 на фиг.2 предназначено для непрерывной обработки расстояния В-С стыковочное гнездо-штанга, и, предпочтительно, курса HI и скорости VI стыковочного гнезда 4, курса Н2 и скорости V2 штанги 6, а также курса НА и скорости V2 летательного аппарата-танкера 2, для определения поперечных (вертикальных/горизонтальных) перемещений стыковочного гнезда 4 и/или приемного летательного аппарата 5, необходимых для совмещения соответственных продольных осей Z и Y стыковочного гнезда 4 и штанги 6.
Более точно, вычислительное устройство 15 непрерывно снабжается модулями 9, 10, 11 дифференциального спутникового позиционирования вышеприведенной информацией касательно скоростей VA, V1, V2, расстояний А-В, В-С, А-С и курсов НА, H1, Н2, и обрабатывает ее для выработки сигнала 3COM управления, содержащего в себе информацию касательно необходимого вертикального/горизонтального перемещения стыковочного гнезда 4 и/или информацию касательно необходимого вертикального/горизонтального перемещения приемного летательного аппарата 5.
Соответственно, система 7 содействия соединению стыковочного гнезда-штанги может содержать систему 21 автопилота приемного летательного аппарата, которая принимает сигнал 3COM управления и автоматически управляет приемным летательным аппаратом 5 для перемещения его вертикально и/или горизонтально согласно перемещениям, содержащимся в сигнале 3COM управления.
В примере по фиг.2, система 21 автопилота приемного летательного аппарата содержит модуль 22 приемопередатчика сигнала, который принимает сигнал SCOM управления из вычислительного устройства 15; модуль 23 обработки, который принимает сигнал 3COM управления и соответственно определяет необходимое перемещение приемного летательного аппарата 5; и известное устройство 24 автопилота летательного аппарата, которое снабжается модулем 23 обработки информацией касательно необходимого перемещения летательного аппарата 5, и пилотирует летательный аппарат 5 для перемещения его вертикально и/или горизонтально в соответствии с принятой информацией.
Вычислительное устройство 15 также предназначено для выработки, в качестве функции расстояния А-В, первого тревожного сигнала AL1, содержащего в себе расстояние А-В и указывающего первую опасную ситуацию, вызванную стыковочным гнездом 4, подлетающим угрожающе близко к летательному аппарату-танкеру 2.
Например, вычислительное устройство 15 может быть предназначено для выработки первого тревожного сигнала AL1, когда расстояние А-В падает ниже первого порога безопасности, представляющего минимальное безопасное расстояние между стыковочным гнездом 4 и летательным аппаратом-танкером 2.
Необходимо указать, что тревожный сигнал AL1 может вырабатываться не только для указания опасной ситуации, но также для указания ненадлежащего положения стыковочного гнезда 4 по отношению к летательному аппарату-танкеру 2 и способного к повреждению шланга 3.
Вычислительное устройство 15 также предназначено для выработки, в качестве функции расстояния А-С, второго тревожного сигнала AL2, содержащего в себе расстояние А-С и указывающего вторую опасную ситуацию, вызванную приемным летательным аппаратом 5, подлетающим угрожающе близко к летательному аппарату-танкеру 2.
Вычислительное устройство 15 может быть предназначено для выработки второго тревожного сигнала AL2, когда расстояние А-С падает ниже второго порога безопасности, представляющего минимальное безопасное расстояние между приемным летательным аппаратом 5 и летательным аппаратом-танкером 2.
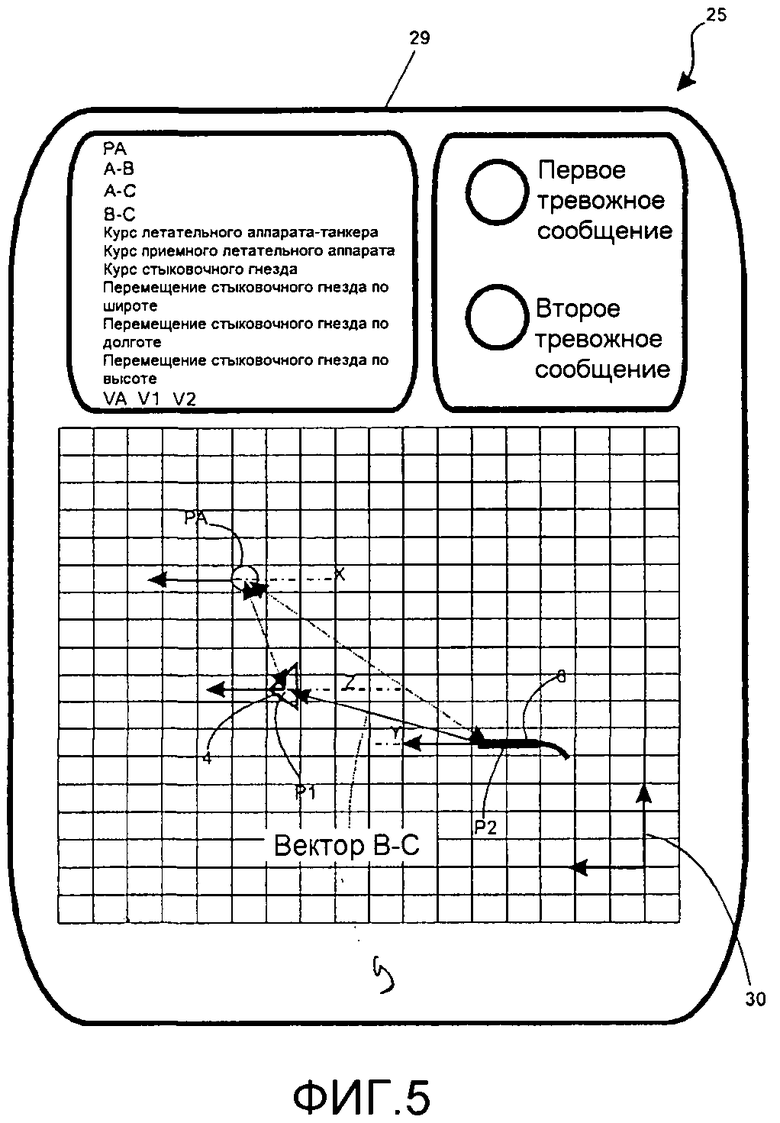
Система 7 содействия соединению стыковочного гнезда-штанги также содержит один или более пользовательских интерфейсов 25, каждый предназначен для приема информации касательно абсолютного положения РА, расстояния В-С стыковочное гнездо-штанга и/или курса HI, и/или скорости VI стыковочного гнезда 4, и/или курса Н2, и/или скорости V2 штанги б/приемного летательного аппарата 5, курса НА и скорости VA летательного аппарата-танкера 2, и для сообщения этой информации пилоту, чтобы содействовать пилоту в присоединении штанги к стыковочному гнезду.
Более точно, в примере по фиг.5, каждый пользовательский интерфейс 25 содержит экран или дисплей 29, который снабжает пилота непрерывным графическим отображением: предопределенной, предпочтительно, хотя и необязательно, двухмерной системой 30 координат; положением РА и маршрутом/направлением/курсом летательного аппарата-танкера 2; положением Р1 и маршрутом/направлением/курсом стыковочного гнезда 4; а также положением Р2 и маршрутом/направлением/курсом штанги 6 (приемного летательного аппарата 5).
Каждый пользовательский интерфейс 25 также предназначен для непрерывного сообщения пилоту: скорости VA летательного аппарата-танкера 2, и/или скорости VI стыковочного гнезда 4, и/или скорости V2 штанги 6, и/или расстояний А-В, А-С и В-С.
Каждый пользовательский интерфейс 25 также предназначен для приема первого тревожного сигнала AL1 и/или второго тревожного сигнала AL2 и для формирования тревожного сообщения, указывающего первую и/или вторую опасную ситуацию и/или измеренные расстояния А-В, А-С.
Соответственно, пользовательский интерфейс 25 может содержать устройство для вывода звуковых или визуальных сообщений, содержащих в себе информацию касательно первой и/или второй тревожной ситуации.
В примере по фиг.1 и 2, система 7 содействия соединению стыковочного гнезда-штанги содержит два пользовательских интерфейса 25, один установлен в кабине 26 летательного аппарата-танкера 2 и предназначен для обмена информацией с ведущим модулем 9 дифференциального спутникового позиционирования, а другой установлен в кабине 28 приемного летательного аппарата 5 и предназначен для обмена информацией с ведомым модулем 11 дифференциального спутникового позиционирования.
Вычислительное устройство 15 также может быть предназначено для передачи первого тревожного сигнала AL1 и/или второго тревожного сигнала AL2; а система 21 автопилота может быть предназначена для приема второго тревожного сигнала AL2 и управления перемещением приемного летательного аппарата 5 по отношению к летательному аппарату-танкеру 2 в качестве функции расстояния А-С в тревожном сигнале AL2, чтобы возвращать приемный летательный аппарат 5 в безопасное положение по отношению к летательному аппарату-танкеру 2.
В одном из вариантов осуществления модуль 20 электронного управления стыковочным гнездом предназначен для приема первого тревожного сигнала AL1 и подает команду сборке 8 управления перемещать стыковочное гнездо 4 по отношению к летательному аппарату-танкеру 2 в качестве функции расстояния А-В в тревожном сигнале AL1, и, таким образом, возвращать стыковочное гнездо 4 в безопасное положение по отношению к летательному аппарату-танкеру 2.
Способ эксплуатации, реализованный вспомогательной системой 1 дозаправки в воздухе, как описано выше, и с конфигурацией модуля позиционирования, показанного в примере по фиг.1, далее будет описан со ссылкой на фиг.6, 7 и 8.
Способ эксплуатации содержит первый этап, на котором летательный аппарат-танкер 2 перемещается по прямой линии на постоянной скорости, а приемный летательный аппарат начинает приближение к летательному аппарату-танкеру 2 (этап 100).
В этот момент ведомый модуль 11 дифференциального спутникового позиционирования рассчитывает и передает расстояние А-С в вычислительное устройство 15 (этап 110), который определяет, в качестве функции расстояния А-С, наличие или отсутствие второй опасной ситуации, вызванной приемным летательным аппаратом 5, подлетающим угрожающе близко к летательному аппарату-танкеру 2 (этап 120).
На этой стадии (этапе 120), вычислительное устройство 15 выполняет проверку второй опасной ситуации и определяет наличие второй опасной ситуации, например, когда расстояние А-С ниже второго порога безопасности, представляющего минимальное безопасное расстояние между летательным аппаратом-танкером 2 и приемным летательным аппаратом 5 (результат Да по этапу 120).
В случае если определена вторая опасная ситуация, вычислительное устройство 15 подает команду передачи второго тревожного сигнала AL2 (этап 130).
Второй тревожный сигнал AL2 отправляется на интерфейсы 25 и/или систему 21 автопилота приемного летательного аппарата.
Интерфейсы 25 формируют тревожное сообщение для содействия пилотам предупреждением их об опасной ситуации, и чтобы дать пилотам возможность вмешаться вручную для возврата соответственного летательного аппарата 2 и 5 на расстояние, большее, чем или равное минимальному безопасному расстоянию (этап 140).
На этой стадии система 21 автопилота может вмешиваться независимо, то есть может пилотировать приемный летательный аппарат автоматически в качестве функции второго тревожного сигнала AL2, чтобы перемещать его дальше и назад на безопасное расстояние от летательного аппарата-танкера (этап 150).
Наоборот, если никакой второй опасной ситуации не определено во время приближения, пилот продолжает перемещать приемный летательный аппарат 5 в оптимальное положение сближения.
Это может делаться вручную, то есть самостоятельно пилотом, либо полностью автоматически.
В режиме ручного управления пилот приемного летательного аппарата 5 перемещает летательный аппарат в оптимальное положение, наблюдая за положениями двух летательных аппаратов и/или положениями штанги/стыковочного гнезда, отображаемыми на пользовательском интерфейсе 25 в кабине 28.
В качестве альтернативы в автоматическом режиме вычислительное устройство 15 предназначено для определения наилучшей траектории сближения в качестве функции расстояния А-С и скоростей VA летательного аппарата-танкера 2 и V2 приемного летательного аппарата 5, измеренных соответственными ведущим и ведомым модулями 9 и 11 дифференциального спутникового позиционирования.
Более точно, вычислительное устройство 15 предназначено для непрерывного расчета, в качестве функции расстояния А-С и скоростей VA и V2, необходимого перемещения/ий и скорости приемного летательного аппарата 5 для перемещения его в положение стыковки, и передает эту информацию в систему 21 автопилота.
В этот момент, система 21 автопилота, поэтому, способна пилотировать летательный аппарат 5 автоматически, в качестве функции информации о перемещении/скорости, определенной вычислительным устройством 15.
В случае, если летательному аппарату 5 не удается переместиться в положение стыковки (результат Нет по этапу 180), способ повторяет операции на этапах 110-160.
Наоборот, в случае, если летательный аппарат 5 преуспевает в перемещении в положение стыковки (результат Да по этапу 180), способ начинает процедуру присоединения стыковочного гнезда-штанги.
В этот момент, ведомый модуль 10 дифференциального спутникового позиционирования определяет и передает расстояние А-В в вычислительное устройство 15, которое рассчитывает расстояние В-С на основе расстояния А-В и расстояния А-С, определенных и переданных ведомым модулем 11 дифференциального спутникового позиционирования (этап 190).
В этот момент вычислительное устройство 15 определяет, на основе расстояния А-В, наличие или отсутствие первой опасной ситуации, вызванной стыковочным гнездом 4, подлетающим угрожающе близко к летательному аппарату-танкеру 2 (этап 200).
На этой стадии, вычислительное устройство 15 выполняет проверку первой опасной ситуации и определяет наличие первой опасной ситуации (результат Да по этапу 120), например, когда расстояние А-В ниже первого порога безопасности, представляющего минимальное безопасное расстояние между стыковочным гнездом и летательным аппаратом-танкером 2.
В случае если определена первая опасная ситуация, вычислительное устройство 15 передает первый тревожный сигнал AL1 (этап 210), который, в этом случае, отправляется в интерфейсы 25 и/или модуль 20 электронного управления.
Интерфейс 25 формирует тревожное сообщение для предупреждения пилота летательного аппарата-танкера 2 об опасной ситуации, и чтобы дать пилоту возможность вмешиваться вручную для возврата летательного аппарата-танкера 2 на расстояние, большее чем или равное минимальному безопасному расстоянию от стыковочного гнезда 4 (этап 220).
На этой стадии модуль 20 электронного управления сборки 8 управления стыковочным гнездом также автоматически управляет стыковочным гнездом 4 для перемещения его от летательного аппарата-танкера 2 на расстояние, большее, чем или равное безопасному расстоянию (этап 230). Необходимо указать, что это делается в качестве функции расстояния А-В, содержащегося в первом тревожном сигнале AL1.
Наоборот, в случае, если первая опасная ситуация не определена, вычислительное устройство 15 непрерывно снабжается модулями 9, 10, 11 дифференциального спутникового позиционирования информацией о скорости, расстоянии и курсе, и обрабатывает ее для выработки сигнала 3COM управления, содержащего в себе информацию касательно необходимого вертикального/горизонтального перемещения стыковочного гнезда 4 и/или информацию касательно необходимого вертикального/горизонтального перемещения приемного летательного аппарата 5, чтобы добиться соединения стыковочного гнезда-штанги.
В показанном примере эта стадия, предпочтительно, хотя и не обязательно, может содержать преобразование вектора расстояния В-С согласно первой системе координат, содержащей широту, долготу и высоту, в вектор расстояния В-С согласно системе координат (не показана) UTM (универсальной поперечной проекции Меркатора).
Система координат UTM может быть представлена декартовой сеткой с тремя перпендикулярными осями, в которой ось х UTME (не показана) проходит в направлении земли с востока на запад, ось у UTMN (не показана) проходит в направлении земли с севера на юг и определяет плоскость UTMEN (не показана) с осью х UTME (не показана), а третья ось UTMZ (не показана) ассоциативно связана с вертикальными координатами, то есть непосредственно с высотой.
При условии, что третья составляющая является нулевой, то есть ось Y штанги 6 и ось Z стыковочного гнезда, обе, находятся на одной и той же высоте, вычислительное устройство 15 может преобразовывать вектор расстояния В-С согласно первой системе координат в вектор расстояния В-С согласно системе координат UTM, а затем может поворачивать вектор В-С в плоскости UTMNE на угол, равный курсу Н2 приемного летательного аппарата 5, для получения поперечной составляющей и продольной составляющей вектора В-С по отношению к направлению приемного летательного аппарата 5 (этап 240).
Поперечная и продольная составляющие вектора В-С, полученные таким образом, представляют информацию касательно перемещения, которое должно кодироваться в сигнале 3COM управления (этап 250).
В этот момент вычислительное устройство 15 передает сигнал 3COM управления в модуль 20 электронного управления (этап 260), который управляет перемещением стыковочного гнезда 4 посредством силовых приводов 19 в качестве функции перемещений, содержащихся в сигнале 3COM управления (этап 280).
В одном из вариантов осуществления сигнал 3COM управления отправляется в систему 21 автопилота, которая автоматически перемещает летательный аппарат 5 на основании перемещений, содержащихся в сигнале SCOM управления (этап 270).
В этот момент вычислительное устройство 15 определяет, в качестве функции расстояния В-С, совмещены ли соответственные продольные оси Z и Y стыковочного гнезда и штанги 6 (этап 290).
Если они не совмещены (результат Нет по этапу 290), способ повторяет операции на этапах 190-280; наоборот, если продольные оси Z и Y совмещены, вычислительное устройство 15 передает сигнал, содержащий в себе информацию, указывающую совмещение стыковочного гнезда-штанги и санкционирующую приближение приемного летательного аппарата 5 к стыковочному гнезду 4. Более точно, этот сигнал отправляется на пользовательский интерфейс 25, который формирует сообщение, информирующее пилота о совмещении стыковочного гнезда-штанги и требующее, чтобы пилот перемещал летательный аппарат 5 по направлению к стыковочному гнезду 4.
В этот момент пилот перемещает приемный летательный аппарат 5 вперед по прямой линии, чтобы вставить штангу 6 внутрь стыковочного гнезда 4 (этап 300).
В одном из вариантов осуществления, как только оси Z и Y совмещены, вычислительное устройство 15 определяет, в качестве функции скоростей VA, VI, V2 и расстояния В-С, необходимые регулировки в отношении V2 приемного летательного аппарата, чтобы добиться соединения стыковочного гнезда-штанги (этап 310).
На этой стадии вычислительное устройство 15 передает сигнал SCA, содержащий в себе команды регулировать скорость V2, в систему 21 автопилота, которая приступает к перемещению летательного аппарата 5 вперед полностью автоматически, производя регулировки скорости, содержащиеся в сигнале SCA.
Очевидно, если стыковочное гнездо 4 и штанга 6 совмещены идеально, а скорости VI, V2 и курсы H1, H2 стыковочного гнезда и штанги соответствуют, соединение стыковочного гнезда-штанги может завершаться исключительно на основе расстояния В-С.
Вычислительное устройство 15 определяет успешное соединение стыковочного гнезда-штанги, когда расстояние В-С является нулевым (этап 320).
Если соединение не достигнуто (результат Нет по этапу 320), способ повторяет операции на этапах 310-320.
Как только соединение стыковочного гнезда-штанги достигнуто (результат Да по этапу 320), вычислительное устройство 15 подает команду дозаправки (этап 330), и, как только дозаправка завершена (результат Да по этапу 340), подает команду расцепления стыковочного гнезда и штанги, снабжая пользовательские интерфейсы 25 сигналом, содержащим в себе информацию, указывающую, что дозаправка завершена, и запрос на расцепление стыковочного гнезда и штанги и отдаление двух летательных аппаратов.
Со ссылкой на фиг.8, расстояния А-В, А-С, В-С непрерывно рассчитываются системой 7, описанной выше, по существу, устройством спутникового позиционирования DGPS/RTK ведущего модуля 9 дифференциального спутникового позиционирования, определяющим свое собственное абсолютное положение РА в пространстве в показателях широты, долготы и высоты, и реализующим алгоритм RTK, который определяет дифференциальную поправку C-RTK, зависящую от исходной ошибки в измерении РА посредством спутниковой системы GPS (этап 400).
Ведущий модуль 9 дифференциального спутникового позиционирования затем передает абсолютное положение РА и дифференциальную поправку С-RTK в ведомые модули 10 и 11 дифференциального спутникового позиционирования (этап 410).
По приему информации, переданной ведущим модулем 9 дифференциального спутникового позиционирования, ведомый модуль 11 дифференциального спутникового позиционирования определяет расстояние А-С в качестве функции своего собственного положения по отношению к положению РА и на основе дифференциальных поправок C-RTK, и передает расстояние А-С в вычислительное устройство 15 (этап 430).
По приему информации, переданной ведущим модулем 9 дифференциального спутникового позиционирования, ведомый модуль 10 дифференциального спутникового позиционирования определяет расстояние А-В в качестве функции своего собственного положения по отношению к положению РА и на основе дифференциальных поправок C-RTK, и передает расстояние А-В в вычислительное устройство 15 (этап 420).
В этот момент вычислительное устройство 15 рассчитывает расстояние В-С посредством эвклидова геометрического расчета на основе расстояний А-С и А-В (этап 440).
Описанная система дозаправки в воздухе имеет следующие преимущества.
Прежде всего, использование устройств спутникового позиционирования DGPS/RTK дает точность измерения расстояния приблизительно в сантиметр, в соответствии с которой следует добиваться соединения стыковочного гнезда-штанги, в отличие от традиционных спутниковых систем GPS с точностью измерения в несколько метров.
Система значительно снижает рабочую нагрузку на пилотов на стадии соединения стыковочного гнезда-штанги. Фактически, даже в самом простом решении, в котором приближение приемного летательного аппарата выполняется вручную, пилот может управлять приемным летательным аппаратом на основе положений, отображаемых на пользовательском интерфейсе, без необходимости отслеживать положение летательного аппарата-танкера и/или стыковочного гнезда снаружи кабины. Другими словами, пилот имеет преимущество способности управлять сближением простым сосредоточением на графической информации о положении, отображенной на пользовательском интерфейсе, независимо от погодных условий и даже ночью.
Вариант, содержащий в себе отличительный признак автоматического приближения приемного летательного аппарата и/или автоматического соединения стыковочного гнезда-штанги на основе перемещений, определенных вычислительным устройством, очевидно, не только значительно уменьшает стресс пилота, но также дает дозаправке возможность завершаться в пределах предопределенного времени, независимо от погодных условий.
Описанная система, поэтому, обладает преимуществом способности предварительно программировать дозаправку в воздухе заданного количества летательных аппаратов, наряду с одновременным радикальным снижением риска несостоятельности дозаправки.
Ясно, что изменения могут быть произведены в отношении описанной системы, однако, не выходя из объема настоящего изобретения, который определен в прилагаемой формуле изобретения.
Более точно, вариант осуществления по фиг.9 относится к системе 40 дозаправки в воздухе, подобной системе 1 дозаправки в воздухе, и составные части которой указаны, где возможно, с использованием таких же номеров ссылок, как для соответствующих частей системы 1.
Система 40 дозаправки отличается от системы 1 дозаправки тем, что ведомый модуль дифференциального спутникового позиционирования системы 7 содействия соединению стыковочного гнезда-штанги заменен измерительным устройством 41 для измерения расстояния А-В между летательным аппаратом-танкером 2 и стыковочным гнездом 4.
Более точно, измерительное устройство 41 может быть известным оптоэлектронным лазерным устройством, подробно не описанным, или любым другим подобным электронным устройством для измерения расстояния между двумя объектами.
В варианте осуществления по фиг.9 ведущий модуль 9 дифференциального спутникового позиционирования установлен непосредственно на стыковочном гнезде 4, а ведомый модуль 11 дифференциального спутникового позиционирования установлен на приемном летательном аппарате 5.
В этом случае расстояние В-С определяется непосредственно ведомым модулем 11 дифференциального спутникового позиционирования на приемном летательном аппарате 5; расстояние А-В измеряется измерительным устройством 41; расстояние А-С определяется вычислительным устройством 15 в качестве функции расстояний В-С и А-В; а система 7 содействия соединению стыковочного гнезда-штанги предусматривает соединение стыковочного гнезда 4 и штанги 6, как описано на блок-схемах последовательности операций по фиг.6, 7 и 8, на основе расстояний А-В, В-С и А-С.
Очевидно, что ведущий модуль 9 дифференциального спутникового позиционирования может быть установлен непосредственно на приемном летательном аппарате 5, а ведомый модуль 11 дифференциального спутникового позиционирования может быть установлен на стыковочном гнезде 4.
Вариант осуществления по фиг.10 относится к вспомогательной системе 50 дозаправки в воздухе, подобной системе 1 дозаправки в воздухе, и составные части которой указаны, где возможно, с использованием таких же номеров ссылок, как для соответствующих частей системы 1.
Вспомогательная система 50 дозаправки отличается от вспомогательной системы 1 дозаправки тем, что ведомый модуль дифференциального спутникового позиционирования системы 7 содействия соединению стыковочного гнезда-штанги заменен измерительным устройством 51 для измерения расстояния В-С между приемным летательным аппаратом 5 и стыковочным гнездом 4.
Более точно, измерительное устройство 51 может быть известным оптоэлектронным лазерным устройством, подробно не описанным, или любым другим подобным электронным устройством для измерения расстояния между объектом, на котором оно установлено, и другим объектом.
В варианте осуществления по фиг.10 ведущий модуль 9 дифференциального спутникового позиционирования установлен на летательном аппарате-танкере 2, а ведомый модуль 10 дифференциального спутникового позиционирования установлен непосредственно на стыковочном гнезде 4.
В этом случае расстояние В-С определяется непосредственно измерительным устройством 51 на приемном летательном аппарате 5;
расстояние А-В измеряется ведущим модулем дифференциального спутникового позиционирования; расстояние А-С определяется вычислительным устройством 15 в качестве функции расстояний В-С и А-В; а система 7 содействия соединению стыковочного гнезда-штанги предусматривает соединение стыковочного гнезда 4 и штанги 6 с использованием идентичной процедуры управления, описанной на блок-схемах последовательности операций по фиг.6, 7 и 8, на основе расстояний А-В, В-С и А-С.
В непоказанном варианте вспомогательная система 1 дозаправки в воздухе содержит некоторое количество приемных летательных аппаратов 5, каждый из которых содержит модуль 11 позиционирования DGPS/RTK.
Вычислительное устройство 15 системы 7 содействия соединению стыковочного гнезда-штанги предназначено для непрерывного определения относительной скорости между каждым приемным летательным аппаратом и летательным аппаратом-танкером 2 на основе информации, вырабатываемой соответственным модулем 11 позиционирования.
Вычислительное устройство 15 также определяет расстояние А-С между каждым приемным летательным аппаратом 5 и летательным аппаратом-танкером 2, с тем, чтобы определять направление каждого приемного летательного аппарата 5 в качестве функции расстояния А-С и относительной скорости между приемным летательным аппаратом 5 и летательным аппаратом-танкером 2.
Вычислительное устройство 15 информирует пилота летательного аппарата-танкера 2, через пользовательский интерфейс 25 на летательном аппарате-танкере 2, о положении и направлении движения каждого приемного летательного аппарата 5 по отношению к летательному аппарату-танкеру 2.
Вычислительное устройство 15 также может быть предназначено для информирования пилота каждого приемного летательного аппарата 5, через соответственный пользовательский интерфейс 25, о положении и направлении движения каждого приемного летательного аппарата 5 по отношению к летательному аппарату-танкеру 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТЫКОВКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, СТЫКОВОЧНАЯ СИСТЕМА И СЦЕПНОЕ УСТРОЙСТВО | 2022 |
|
RU2791625C1 |
| СИСТЕМА ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2104229C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ДИНАМИКИ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА И МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2484535C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| БОРТОВАЯ СИСТЕМА СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА СИСТЕМЕ GNSS, ИМЕЮЩАЯ ИЗБЫТОЧНУЮ И НЕСХОДНУЮ АРХИТЕКТУРУ ДЛЯ ПОВЫШЕННОГО УРОВНЯ ДОСТОВЕРНОСТИ | 2013 |
|
RU2621827C2 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2100257C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ ЭЛЕКТРОПОЕЗД | 2017 |
|
RU2734559C2 |
| СПОСОБ ПОМОЩИ В НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2523183C2 |

Изобретение относится к области авиации, в частности к системам дозаправки летательных аппаратов в воздухе. Система (1) дозаправки в воздухе включает летательный аппарат-танкер (2), оборудованный стыковочным гнездом (4), топливоприемный летательный аппарат (5), оборудованный штангой (6), и электронную систему управления полетом (7). Система управления (7) содержит три модуля позиционирования (10, 11, 13) DGPS/RTK, установленных соответственно на стыковочном гнезде (4), приемном летательном аппарате (5) и летательном аппарате-танкере (2), для определения расстояний между стыковочным гнездом (4) и штангой (6) (В-С), танкером (2) и стыковочным гнездом (4) (А-В), танкером (2) и штангой (6), средство (15) электронного управления для определения необходимого перемещения стыковочного гнезда (4) или приемного летательного аппарата (5) для присоединения стыковочного гнезда (4) к штанге (6) и средство (18, 19) управления, установленное на стыковочном гнезде (4). Средство электронного управления (15) предназначено для приема упомянутых двух расстояний, рассчитанных модулями позиционирования, расчета расстояния между упомянутыми ведомыми модулями, управления средством (18, 19) управления для перемещения стыковочного гнезда (4) в поперечном направлении и определения опасной ситуации и выработке тревожного сигнала. Достигается повышение безопасности при дозаправке летательных аппаратов в воздухе. 9 з.п. ф-лы, 10 ил.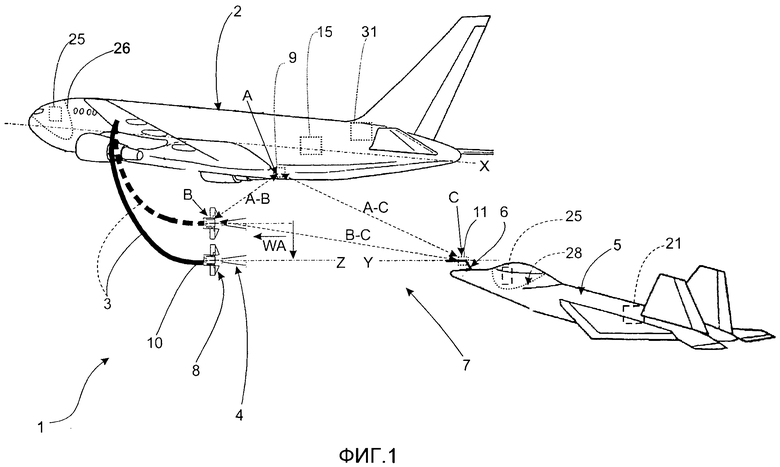
1. Вспомогательная система (1) дозаправки в воздухе, выполненная с возможностью заправки топливом приемного летательного аппарата (5), при этом вспомогательная система дозаправки в воздухе содержит топливоприемный летательный аппарат, снабженный штангой (6); летательный аппарат-танкер (2) и стыковочное гнездо (4), присоединенное к летательному аппарату-танкеру (2) посредством шланга (3) и тянущееся летательным аппаратом-танкером в предопределенном направлении движения (WA);
упомянутая вспомогательная система (1) дозаправки в воздухе отличается тем, что содержит электронную систему (7) управления полетом, содержащую:
- три модуля (10), (11), (9) позиционирования DGPS/RTK, установленных,соответственно на упомянутом стыковочном гнезде (4), упомянутом приемном летательном аппарате (5) и упомянутом летательном аппарате-танкере (2) для определения первой величины, указывающей первое расстояние (В-С) между упомянутым стыковочным гнездом (4) и упомянутой штангой (6); второй величины, указывающей второе расстояние (А-В) между упомянутым летательным аппаратом-танкером (2) и упомянутым стыковочным гнездом (4); и третьей величины, указывающей третье расстояние (А-С) между упомянутым летательным аппаратом-танкером (2) и упомянутой штангой (6); один из упомянутых трех модулей (10), (11), (9) позиционирования DGPS/RTK содержит ведущий модуль позиционирования DGPS/RTK, сконфигурированный с возможностью определения и передачи своего собственного мгновенного абсолютного положения РА и дифференциальной поправки (C-RTK); другие два модуля позиционирования DGPS/RTK содержат соответственно ведомый модуль позиционирования DGPS/RTK, сконфигурированный с возможностью приема упомянутого абсолютного положения РА и упомянутой дифференциальной поправки (C-RTK), и определения своего собственного расстояния относительно упомянутого ведущего модуля позиционирования DGPS/RTK на основании упомянутого принятого абсолютного положения (РА) и упомянутой принятой дифференциальной поправки (C-RTK);
- средство (15) электронного управления, сконфигурированное с возможностью взаимодействия с упомянутыми тремя модулями позиционирования (9), (10), (11), чтобы определять, в зависимости от упомянутого первого (В-С), второго (А-В) и третьего (А-С) расстояний, необходимое перемещение упомянутого стыковочного гнезда (4) и/или необходимое перемещение упомянутого приемного летательного аппарата (5) для присоединения стыковочного гнезда (4) к штанге (6),
- средство (18, 19) управления, установленное на стыковочном гнезде (4) и сконфигурированное с возможностью перемещения стыковочного гнезда (4) в одном или более поперечных направлениях поперек направления движения (WA);
при этом упомянутое средство (15) электронного управления дополнительно сконфигурировано с возможностью:
- приема упомянутых двух расстояний, рассчитанных упомянутыми ведомыми модулями позиционирования DGPS/RTK;
- расчета расстояния между упомянутыми ведомыми модулями позиционирования на основании двух принятых рассчитанных расстояний; при этом три рассчитанных расстояния соответственно связаны с упомянутыми первым (В-С), вторым (А-В) и третьим расстояниями (А-С);
- управления упомянутым средством (18, 19) управления на основании упомянутых первого (В-С), второго (А-В) и третьего (А-С) расстояний с тем, чтобы перемещать стыковочное гнездо (4) в одном или более поперечных направлениях поперек упомянутого направления движения (WA), для совмещения продольной оси стыковочного гнезда (4) с продольной осью упомянутой штанги (6);
- определения опасной ситуации и выработки первого тревожного сигнала (AL2), указывающего, что упомянутый приемный летательный аппарат (5) подлетает угрожающе близко к упомянутому летательному аппарату-танкеру (2), когда упомянутое третье расстояние (А-С) находится ниже предопределенного первого порогового значения.
2. Вспомогательная система (1) дозаправки в воздухе по п. 1, в которой упомянутая электронная система (7) управления полетом содержит средство (21) электронного автоматического управления, установленное на приемном летательном аппарате (5) и предназначенное для автоматического пилотирования упомянутого приемного летательного аппарата (5) в зависимости от упомянутого первого (В-С), второго (А-В) и третьего (А-С) расстояния, чтобы совмещать упомянутую штангу (6) с упомянутым стыковочным гнездом (4).
3. Вспомогательная система (1) дозаправки в воздухе по п. 1, в которой упомянутая электронная система (7) управления полетом содержит по меньшей мере один пользовательский интерфейс (25), установленный на упомянутом летательном аппарате-танкере (2, и/или упомянутом приемном летательном аппарате (5); упомянутый пользовательский интерфейс (25) предназначен для снабжения пользователя мгновенным положением (РА) упомянутого летательного аппарата-танкера (2) и/или мгновенным положением (Р1) упомянутого стыковочного гнезда (4), и/или мгновенным положением (Р2) упомянутого приемного летательного аппарата (5) в зависимости от упомянутого первого (В-С), второго (А-В) и третьего (А-С) расстояния.
4. Вспомогательная система (1) дозаправки в воздухе по п. 2, в которой упомянутое средство (15) электронного управления сконфигурировано с возможностью взаимодействия с упомянутым средством (21) электронного автоматического управления для перемещения упомянутого приемного летательного аппарата (5) на расстояние, большее чем или равное предопределенному безопасному расстоянию от упомянутого летательного аппарата-танкера (2), в зависимости от упомянутого первого тревожного сигнала (AL2).
5. Вспомогательная система (1) дозаправки в воздухе по п. 4, в которой, по приему упомянутого первого тревожного сигнала (AL2), каждый упомянутый пользовательский интерфейс (25) сконфигурирован с возможностью отправки пилоту тревожного сообщения, указывающего, что упомянутый приемный летательный аппарат (5) подлетает угрожающее близко к упомянутому летательному аппарату-танкеру (2).
6. Вспомогательная система (1) дозаправки в воздухе по п. 3, в которой упомянутая электронная система (7) управления полетом сконфигурирована с возможностью выработки второго тревожного сигнала (AL1), указывающего, что упомянутое стыковочное гнездо (4) подлетает угрожающе близко к упомянутому летательному аппарату-танкеру (2), когда упомянутое второе расстояние (А-В) находится ниже предопределенного второго порогового значения.
7. Вспомогательная система (1) дозаправки в воздухе по п. 6, в которой упомянутое средство (15) электронного управления сконфигурировано с возможностью взаимодействия с упомянутым средством (21) электронного автоматического управления для автоматического перемещения упомянутого стыковочного гнезда (4) в упомянутых поперечных направлениях, посредством упомянутого средства (18, 19) управления, на расстояние, большеечем или равное предопределенному безопасному расстоянию от упомянутого летательного аппарата-танкера (2), в зависимости от упомянутого второго тревожного сигнала (AL1).
8. Вспомогательная система (1) дозаправки в воздухе по п. 3, в которой упомянутые пользовательские интерфейсы (25) сконфигурированы с возможностью приема упомянутого второго тревожного сигнала (AL1) и снабжения пилота тревожным сообщением, указывающим, что упомянутое стыковочное гнездо (4) подлетает угрожающее близко к упомянутому летательному аппарату-танкеру (2).
9. Вспомогательная система (1) дозаправки в воздухе по одному из пп. 2-8, в которой упомянутая электронная система управления полетом (7) сконфигурирована с возможностью:
- расчета необходимых перемещения(ий) и скорости приемного летательного аппарата (5) для перемещения его в положение стыковки, в зависимости от третьего расстояния (А-С), скорости (VA) упомянутого летательного аппарата-танкера (2) и скорости (V2) упомянутого приемного летательного аппарата (5), измеренной ведущим модулем (9) позиционирования и ведомым модулем (11);
- пилотирования упомянутого приемного летательного аппарата (5) посредством упомянутого средства (21) электронного автоматического управления в зависимости от упомянутых определенных перемещения(ий) и скорости;
- обработки информации о скорости, расстоянии и курсе, непрерывно снабжаемой модулями (9), (10), (11) дифференциального спутникового позиционирования, для выработки сигнала (SCOM) управления, содержащего в себе информацию касательно необходимого вертикального/горизонтального перемещения стыковочного гнезда (4) и информацию касательно необходимого вертикального/горизонтального перемещения приемного летательного аппарата (5), чтобы добиться соединения стыковочного гнезда-штанги;
- управления перемещением упомянутого стыковочного гнезда (4) или перемещениями упомянутого приемного летательного аппарата (5) при помощи средства (21) электронного автоматического управления в зависимости от перемещений, содержащихся в сигнале (SCOM) управления;
- определения в зависимости от первого расстояния (В-С), совмещены ли упомянутые стыковочное гнездо (4) и штанга (6);
- определения, как только упомянутые стыковочное гнездо (4) и штанга (6) совмещены, необходимых регулировок скорости (V2) приемного летательного аппарата (5), чтобы добиться соединения стыковочного гнезда-штанги в зависимости от скорости (VA) летательного аппарата-танкера (2), скорости (V1) стыковочного гнезда (4), скорости (V2) приемного летательного аппарата (5) и упомянутого первого расстояния (В-С).
10. Вспомогательная система (1) дозаправки в воздухе по п. 9, в которой упомянутая электронная система управления полетом (7) сконфигурирована с возможностью передачи сигнала (SCA), содержащего команды регулировать скорость (V2) приемного летательного аппарата (5) в средство (21) электронного автоматического управления, которое приступает к перемещению приемного летательного аппарата (5) вперед полностью автоматически, производя регулировки скорости, содержащиеся в упомянутом сигнале (SCA).
| US 20050114023 A1, 26.05.2005 | |||
| СИСТЕМА ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2104229C1 |
| WO 1991006471 A1, 16.05.1991 | |||
| WO 1993007055 A1, 15.04.1993 | |||
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |

