Изобретение относится к установке для нанесения покрытия на подложку, содержащей вакуумную камеру, во внутреннем пространстве которой находится подложка для нанесения покрытия, и по меньшей мере одну распыляемую мишень, которая предназначена для абляции во время работы установки путем бомбардировки частицами, при этом установка дополнительно содержит устройство для определения износа распыляемой мишени.
В DE 10234862 А1 описана установка упомянутого во вводной части типа. В соответствии с известным способом распыляемая мишень используется в качестве источника материала для нанесения покрытия на подложку. Износ материала распыляемой мишени обусловлен путем бомбардировки поверхности распыляемой мишени ионами плазмы. Для предотвращения теплового повреждения распыляемой мишени может быть предусмотрено рассеяние тепловой энергии, поступающей от распыляемой мишени, путем охлаждения водой.
Недостатком этого известного из техники решения является то, что после расходования распыляемой мишени несущая пластина, расположенная под распыляемой мишенью, или позиционирующее устройство, на которое опирается распыляемая мишень, подвергается абляции ионами, отражающимися от плазмы. Если это остается незамеченным эксплуатационным персоналом, слой, наносимый на подложку, и(или) вакуумная камера, которая окружает установку, загрязняется материалом несущей пластины или позиционирующего устройства. Если воздействие на несущую пластину или позиционирующее устройство продолжается, могут обнажиться каналы охлаждения, которые проходят внутри этих компонентов, в результате чего охладитель проникнет в вакуумную камеру и загрязнит ее. В этом случае быстрое установление повышенного давления может приводить к последующему повреждению используемых вакуумных насосов или источников питания.
С целью преодоления этого недостатка предлагалось оценивать износ распыляемой мишени на основании произведения мощности распыления и длительности процесса. Поскольку эта оценка подвержена ошибкам, и износ мишени может происходить неравномерно в различных местах, распыляемую мишень часто заменяют с упреждением до достижения предельного износа. Это приводит к недостаточному использованию имеющегося материала и ненужным простоям установки, поскольку для замены распыляемой мишени необходимо проветривать и открывать вакуумную камеру, что занимает много времени.
Соответственно, с учетом известного уровня техники, в основу изобретения положена задача создания способа и установки, позволяющих в максимально возможной степени расходовать материал распыляемой мишени без загрязнения покрытия, формируемого на подложке материалом позиционирующего устройства. Кроме того, задачей настоящего изобретения является увеличение интервалов между циклами технического обслуживания установки для нанесения покрытия на подложку.
Решение задачи изобретения обеспечивается с помощью установки для нанесения покрытия на подложку, содержащей вакуумную камеру, во внутреннем пространстве которой находится подложка для нанесения покрытия, и по меньшей мере одну распыляемую мишень, которая предназначена для абляции во время работы установки путем бомбардировки частицами, при этом установка дополнительно содержит устройство для определения износа распыляемой мишени, в стенке вакуумной камеры имеется по меньшей мере одно окно, а устройство для определения износа распыляемой мишени содержит измерительное устройство для оптического измерения расстояния между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени, при этом измерительное устройство дополнительно содержит оценочное устройство, посредством которого может корректироваться параллакс и(или) геометрическое искажение.
Кроме того, решение задачи изобретения обеспечивается с помощью способа нанесения покрытия на подложку, в котором помещают подложку и по меньшей мере одну распыляемую мишень во внутреннее пространство вакуумной камеры, подвергают распыляемую мишень абляции путем бомбардировки частицами и определяют ее износ, при этом оптически измеряют расстояние между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени через окно в стенке вакуумной камеры и вводят измеренные расстояния в оценочное устройство, которое корректирует по меньшей мере один параллакс и(или) оптическое искажение.
В соответствии с изобретением в стенке вакуумной камеры, которая окружает установку для нанесения покрытия на подложку, выполнено окно. В контексте настоящего изобретения под окном подразумевается область в стенке вакуумной камеры, проницаемая для электромагнитного излучения на волне в предварительно определяемом диапазоне длин. В качестве примера, материал окна может представлять собой стекло или кварц.
Для оптического измерения расстояние между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени направляют через окно электромагнитное излучение на волне предварительно определяемой длины и(или) на волне в предварительно определяемом диапазоне длин на поверхность распыляемой мишени, от которой оно отражается. Отраженный луч света может восприниматься и оцениваться предложенным измерительным устройством. В качестве примера, расстояние между измерительным устройством и поверхностью мишени может определяться путем лазерной триангуляции. В других вариантах осуществления изобретения расстояние может определяться путем оценки фазы отраженного света или путем измерения времени распространения. С этой целью устройством для оптического измерения расстояния могут испускаться световые импульсы. Длина волны может составлять от 3 мкм до 200 нм. В некоторых вариантах осуществления длина волны может составлять от 700 нм до 500 нм.
Бомбардировка частицами с целью удаления распыляемой мишени может осуществляться с использованием положительно или отрицательно заряженных ионов и(или) нейтральных атомов. В некоторых вариантах осуществления изобретения бомбардировка частицами может осуществляться с использованием электронов или фотонов.
По мере постепенного износа распыляемой мишени увеличивается расстояние между предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени. В результате пользователь может определять толщину распыляемой мишени в предварительно определяемой точке с течением времени. Если это изменение расстояния превышает известную толщину распыляемой мишени или равно ей, пользователь установки для нанесения покрытия на подложку получает ясный признак того, что распыляемая мишень полностью израсходована или достигла предельного износа. Этим способом способ нанесения покрытия на подложку можно прерывать до того, как позиционирующее устройство и(или) несущая пластина распыляемой мишени подвергается абляции путем ионной бомбардировки и загрязняет слой, наносимый на подложку. Тем самым также надежно предотвращается абляция материала этих компонентов до такой степени, что охладитель, циркулирующий по каналам охлаждения внутри позиционирующего устройства, просачивается на ограничивающую вакуумную сторону поверхность.
Если луч света, используемый для оптического измерения расстояния, падает под углом, который отличается от нормали к поверхности мишени, измеренные значения могут искажаться или может возникать погрешность от параллакса. В некоторых вариантах осуществления изобретения может быть предусмотрено, что измерительное устройство содержит оценочное устройство или соединено с оценочным устройством, с помощью которого может корректироваться параллакс и(или) геометрическое искажение. Этим способом с относительно высокой степенью точности можно определять толщину распыляемой мишени. В некоторых вариантах осуществления изобретения распыляемая мишень может перемещаться по круговой траектории перед измерительным устройством. В этом случае оценочное устройство может быть рассчитано на коррекцию параболического искажения измеренных значений, регистрируемых измерительным устройством. Оценочное устройство может содержать микропроцессор или микроконтроллер. В некоторых вариантах осуществления оценочное устройство может содержать программное обеспечение, применяющее соответствующий метод коррекции к измеренным значениям при выполнении программного обеспечения компьютером.
В некоторых вариантах осуществления изобретения установка может дополнительно содержать позиционирующее устройство, с помощью которого распыляемая мишень может перемещаться из рабочего положения в место измерения. В этом смысле рабочее положение означает положение распыляемой мишени, при нахождении в котором она расположена напротив подложки, на которую должно наноситься покрытие, и подвергается абляции со стороны падающих ионов, которые отражаются от плазмы на поверхность распыляемой мишени. В отличие от этого, место измерения означает положение, в котором через окно в стенке вакуумной камеры можно наблюдать поверхность распыляемой мишени. В некоторых вариантах осуществления местом измерения и рабочим положением может являться одно и то же положение распыляемой мишени внутри вакуумной камеры. В других вариантах осуществления изобретения место измерения и рабочее положение могут различаться в пространственном отношении. В этом случае может быть предусмотрено, что при переводе мишени из рабочего положения в место измерения она перемещается в область обнаружения измерительного устройства, в результате чего измеренные значения регистрируются вдоль линии, заданной направлением перемещения.
В некоторых вариантах осуществления изобретения позиционирующее устройство может представлять собой цилиндр, на боковой поверхности которого расположена по меньшей мере одна распыляемая мишень. В этом варианте осуществления перемещение из рабочего положение в место измерения может осуществляться путем простого вращения цилиндра. В этом случае вращение может передаваться электродвигателем, расположенным внутри вакуумной камеры, или приводом, расположенным снаружи вакуумной камеры и соединенным с цилиндром посредством магнитной связи.
Измерительное устройство может быть подвижно установлено на опоре. Это позволяет определять толщину или износ распыляемой мишени во множестве точек, лежащих в направлении перемещения. Тем самым можно определять, равномерно ли подвергается абляции распыляемая мишень. Соответственно, можно избегать ситуации, в которой нижележащий материал позиционирующего устройства подвергается абляции в отдельной точке поверхности распыляемой мишени, хотя распыляемая мишень еще имеет достаточную толщину в других точках. В некоторых вариантах осуществления изобретения может быть предусмотрено трехмерное измерение поверхности распыляемой мишени за счет двух ортогональных направлений относительного перемещения мишени и измерительного устройства. В некоторых вариантах осуществления изобретения измерительное устройство может иметь линейный детектор отраженного излучения для осуществления трехмерного измерения поверхности распыляемой мишени за счет относительного перемещения мишени и измерительного устройства в одном направлении. В некоторых вариантах осуществления изобретения измерительное устройство может иметь площадной детектор отраженного излучения для осуществления трехмерного измерения поверхности распыляемой мишени даже без относительного перемещения мишени и измерительного устройства.
В некоторых вариантах осуществления изобретения установка для нанесения покрытия на подложку может дополнительно содержать регулирующее устройство, с помощью которого устанавливается предварительно определяемое желательное значение скорости износа распыляемой мишени и в которое из устройства для определения износа распыляемой мишени может вводиться измеренное значение, характеризующее состояние распыляемой мишени. В некоторых вариантах осуществления регулирующее устройство способно воздействовать на расстояние между поверхностью распыляемой мишени и поверхностью подложки и(или) расстояние между поверхностью распыляемой мишени и магнетроном в качестве регулируемой переменной. Таким способом можно определять скорость износа путем непрерывного мониторинга толщины распыляемой мишени и с высокой степенью точности устанавливать предварительно определяемое желательное значение. В этом варианте осуществления на подложку могут наноситься слои особо равномерной толщины.
В некоторых вариантах осуществления измерительное устройство может быть рассчитано на определение расстояния между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и множеством предварительно определяемых точек на поверхности распыляемой мишени. При этом в измерительном устройстве может использоваться датчик с распределенным чувствительным элементом. Таким образом, толщина слоя распыляемой мишени может определяться на участке с относительно большой площадью поверхности. Если распыляемая мишень перемещается за пределы оснащенного таким образом измерительного устройства, толщина слоя может всего за один проход измеряться на протяжении всей поверхности. Это также позволяет обнаруживать неравномерный износ распыляемой мишени и образование канавок на поверхности распыляемой мишени, поскольку положение и крайние точки определяются на основании измеренных значений.
Далее изобретение будет подробнее описано со ссылкой на чертежи без ограничения общего замысла изобретения, где:
на фиг.1 показан общий вид установки для нанесения покрытия на подложку в поперечном разрезе,
на фиг.2 показана установка для нанесения покрытия на подложку в вертикальном поперечном разрезе,
на фиг.3 показан принцип тонкой корректировки данных измерений,
на фиг.4 показаны необработанные данные, регистрируемые измерительным устройством согласно одному из вариантов осуществления изобретения,
на фиг.5 показан фрагмент необработанных данных, показанных на фиг.4, и
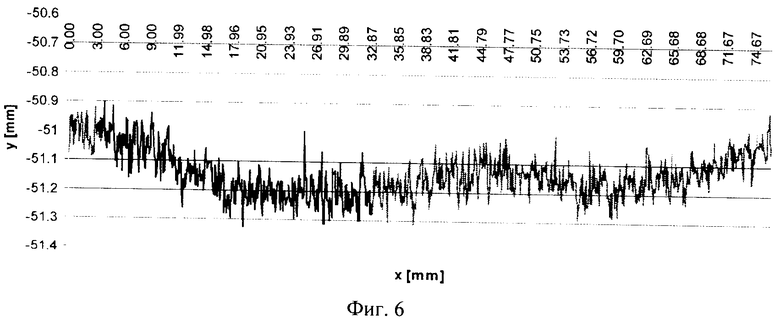
на фиг.6 показаны данные после корректировки согласно изобретению.
На фиг.1 показан общий вид установки 1 для нанесения покрытия на подложку. Установка 1 окружена вакуумной камерой 100. Вакуумная камера 100 может быть изготовлена, например, из металла или сплава металлов. В некоторых вариантах осуществления вакуумная камера быть изготовлена из алюминиевого сплава или высококачественной стали.
Вакуумная камера 100 имеет соединительный фланец 150, посредством которого вакуумная камера 100 соединяется с вакуумным насосом (непоказанным). В некоторых вариантах осуществления с помощью вакуумного насоса в вакуумной камере может создаваться вакуум со степенью разрежения менее 1×10-5 мбар, менее 1×10-6 мбар или менее 1×10-8 мбар.
Кроме того, вакуумная камера 100 имеет по меньшей мере один подвод 170 газа. Распыляемый газ, например аргон, азот или кислород, может впускаться в вакуумную камеру посредством подвода 170 газа. Во время работы распылительной системы давление внутри вакуумной камеры может регулироваться посредством подвода 170 газа в пределах от приблизительно 1×10-2 мбар до приблизительно 10 мбар, в некоторых вариантах осуществления от приблизительно 5×10-2 мбар до приблизительно 1 мбар.
Подложку 125 для нанесения покрытия помещают на держатель 120 подложки. Держатель 120 подложки может быть рассчитан по меньшей мере на одну подложку 125. Держатель 120 подложки может иметь систему нагрева или систему охлаждения, с помощью которой может устанавливаться предварительно определяемая температура подложки 125. Подложкой 125 может являться полупроводниковый материал, тисненый материал или декоративное стекло. Соответственно, покрытием для нанесения на подложку 125 может являться износоустойчивый слой, металлический слой, создающее термический барьер покрытие, слой скольжения или аналогичное функциональное покрытие.
Покрытие для нанесения на подложку 125 содержит по меньшей мере один элемент, который наносят по меньшей мере из одной из распыляемых мишеней 130, 131, 132, 133, 134 и 135. Кроме того, наносимое покрытие может содержать дополнительные элементы, которые поступают из газовой фазы, например в виде химически активного газа или в виде постоянной примеси остаточного газа. Распыляемые мишени 130, 131, 132, 133, 134 и 135 могут иметь одинаковые или различные химические составы.
Распыляемые мишени 130-135 помещаются на позиционирующем устройстве ПО. В проиллюстрированном варианте осуществления позиционирующее устройство ПО выполнено в виде вращающегося цилиндра. За счет этого одна распыляемая мишень из шести распыляемых мишеней 130-135, показанных на фиг.1, в каждом случае может устанавливаться в рабочее положение 200. В рабочем положении 200 выбранная распыляемая мишень, мишень 130 на фиг.1, расположена приблизительно напротив подложки 125 для нанесения покрытия. В других вариантах осуществления изобретения число распыляемых мишеней может составлять более или менее шести. В изобретении не предлагается определенное число мишеней в качестве принципиального решения.
Во время работы системы нанесения покрытий источник 160 напряжения создает разность потенциалов между держателем 120 подложки и распыляемой мишенью 130 в рабочем положении 200. Разность потенциалов может являться постоянной с течением времени как напряжение постоянного тока или может изменяться с течением времени как напряжение переменного тока. Под действием разности потенциалов между поверхностью подложки 125 для нанесения покрытия и поверхностью распыляемой мишени 130 в рабочем положении 200 образуется плазма. Ионы распыляемого газа, который подают посредством соединительного фланца 170, могут ускоряться и попадать на поверхность распыляемой мишени 130. В результате материал распыляемой мишени 130 подвергается абляции, при этом атомы, которые отсоединяются от распыляемой мишени, по меньшей мере частично образуют желаемое покрытие на подложке 125. Тем не менее, изобретение не ограничено проиллюстрированным примером осуществления. В других вариантах осуществления изобретения плазма также может генерироваться с помощью электромагнитного излучения, например сверхвысокочастотного излучения. В некоторых вариантах осуществления изобретения может быть предусмотрено по меньшей мере одно устройство, генерирующее магнитные поля, с целью сдерживания плазмы в предварительно определяемой области пространства между распыляемой мишенью 130 и подложкой 125 для нанесения покрытия и(или) с целью увеличения плотности энергии плазмы.
После полной атомизации распыляемой мишени 130 по меньшей мере над частью поверхности на позиционирующее устройство ПО и(или) необязательную несущую пластину, расположенную под мишенью, агрессивно воздействует плазма. В результате, покрытие, наносимое на подложку 125, загрязняется веществом этих компонентов. Если каналы охлаждения находятся внутри позиционирующего устройства ПО и(или) несущей пластины, охладитель, например вода или сжатый воздух, который циркулирует по каналам охлаждения, может просачиваться во внутреннее пространство 180 вакуумной камеры 100. Чтобы предотвратить это, в изобретении предусмотрено перемещение мишени 130 из рабочего положения 200 в место 250 измерения путем вращения позиционирующего устройства ПО. На фиг.1 показано, что распыляемая мишень 130 находится в месте 250 измерения. Тем не менее, само собой разумеется, что все распыляемые мишени 130-135 могут перемещаться в место 250 измерения за счет вращения позиционирующего устройства 110, осуществляемого циклически или событийно, например, если пользователь установки 1 пожелает определить износ распыляемой мишени 130.
В месте 250 измерения поверхность распыляемой мишени 131 видна через окно 140. Окно 140 выполнено из материала, проницаемого для электромагнитного излучения 310, испускаемого измерительным устройством 300. Проницаемость всегда должна предполагаться, когда по меньшей мере часть электромагнитного излучения способна проходить через окно и падать на поверхность распыляемой мишени 131. В качестве примера, окно 140 может представлять собой стекло, кварц или бериллий или состоять из них.
Для определения остающейся толщины распыляемой мишени 131 предусмотрено, что расстояние между по меньшей мере одной предварительно определяемой точкой 340 снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой 330 на поверхности распыляемой мишени 131 определяют с помощью измерительного устройства 300. В качестве примера по меньшей мере одна предварительно определяемая точка 340 может определяться на основании положения выходной линзы, или датчика, или отклоняющего зеркала, или другого компонента измерительного устройства 300. В других вариантах осуществления предварительно определяемая точка 340 может определяться на основании положения лазера, который генерирует измерительный луч 310.
Измерительный луч 310, испускаемый измерительным устройством 300, отражается от поверхности распыляемой мишени 131 в точке 330. Отраженный луч света 320 может выходить из вакуумной камеры через окно 140 и может обнаруживаться с помощью измерительного устройства 300. Расстояние между точками 340 и 330 может определяться на основании оптического измерения, например, путем фазового сдвига между измерительным лучом 310 и отраженным лучом 320, на основании времени распространения света или путем триангуляции. В некоторых вариантах осуществления изобретения измерительное устройство 300 может содержать датчик с пространственным разрешением для определения положения множества точек 330 на поверхности распыляемой мишени 131. Таким образом, можно осуществлять измерения не только в отдельной точке 330, но также во множестве точек 330 поверхности распыляемой мишени 131. Множество точек 330 может находиться вдоль линии или может быть распределено по площади поверхности распыляемой мишени.
С увеличением износа распыляемой мишени 131 точка 330 на поверхности распыляемой мишени 131 перемещается в направлении позиционирующего устройства ПО. Соответственно, увеличивается расстояние между точками 340 и 330. В то же время, увеличение расстояния соответствует уменьшению толщины распыляемой мишени 131. Если распыляемая мишень 131 вращается посредством позиционирующего устройства ПО напротив окна 140, может быть измерена вся ширина поверхности мишени 131, которая показана на фиг.1. Таким способом также можно обнаруживать неравномерный износ распыляемой мишени 131.
Измеренные значения, генерируемые измерительным устройством 300, могут дополнительно обрабатываться с помощью оценочного устройства 400. Оценочное устройство 400 способно корректировать, например, параллакс и(или) геометрическое искажение. Такое геометрическое искажение может возникать, например, вследствие вращения позиционирующего устройства ПО. Таким способом, планарная поверхность распыляемой мишени 131 отображается в виде параболы. Оценочное устройство 400 может быть рассчитано на визуализацию или сохранение полученных измеренных значений. В других вариантах осуществления изобретения оценочное устройство 400 способно генерировать управляющий и(или) регулирующий сигнал, который оказывает влияние на способ нанесения покрытия во внутреннем пространстве 180 вакуумной камеры 100. В качестве примера, таким способом может обнаруживаться неравномерный износ распыляемой мишени 131 с образованием канавок или поддерживаться желаемая скорость нанесения покрытия.
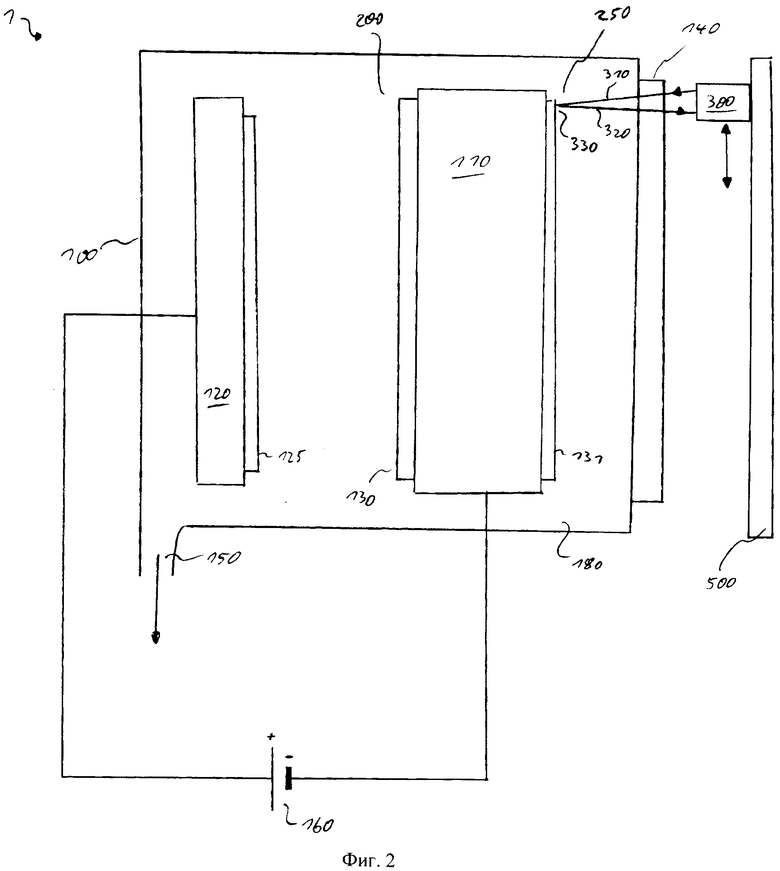
На фиг.2 показан вид в вертикальном разрезе установки 1, показанной на фиг.1. На фиг.2 показана вакуумная камера 100 с расположенным внутри нее держателем 120 подложки и расположенная на нем подложка 125 для нанесения покрытия. Распыляемая мишень 130 находится напротив подложки 125 в рабочем положении 200. Во время работы установки 1 распыляемая мишень 130 подвергается абляции в рабочем положении 200, как пояснено выше со ссылкой на фиг.1.
На фиг.2 также показана распыляемая мишень 131, которая находится в месте 250 измерения. В месте 250 измерения распыляемая мишень 131 находится напротив окна 140. Показанное окно 140 имеет удлиненную форму, которая соответствует приблизительно протяженности в длину распыляемой мишени 131. За счет этого через окно 140 можно наблюдать всю поверхностью распыляемой мишени 131.
На фиг.2 также показано измерительное устройство 300, которое испускает измерительный луч 310 на поверхность распыляемой мишени 131. Измерительный луч 310 отражается от поверхности распыляемой мишени 131 в точке 330 и возвращается в измерительное устройство 300 как луч света 320. Таким способом может определяться износ распыляемой мишени 131 в точке 330.
С целью регистрации дополнительной точки 330 измерений в другом положении на поверхности распыляемой мишени 131 измерительное устройство 300 подвижно установлено на опоре 500. Таким образом измерительное устройство 300 способно перемещаться на протяжении длины распыляемой мишени 131 и тем самым регистрировать множество измеренных значений. Если к тому же позиционирующее устройство ПО вращается, как пояснено со ссылкой на фиг.1, то для измерительного устройства 300 доступна вся поверхность распыляемой мишени 131. Таким способом может измеряться толщина распыляемой мишени 131 по всей площади поверхности.
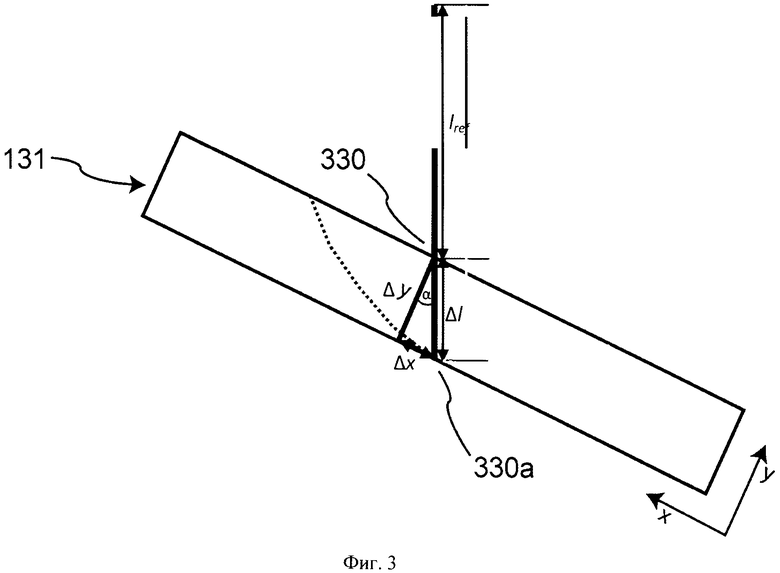
На фиг.3 показан принцип тонкой корректировки данных измерений, получаемых от прямоугольной мишени 131, расположенной на позиционирующем устройстве 110. В данном случае исходная поверхность новой мишени показана сплошной линией, а пример профиля поверхности, который формируется во время работы в результате износа мишени, показан пунктирными линиями.
Позиционирующее устройство ПО представляет собой цилиндр, установленный с возможностью вращения вокруг продольной оси. Как уже пояснялось со ссылкой на фиг.1, на боковой поверхности цилиндра выполнено окно 140, через которое можно наблюдать поверхность мишени 131, находящуюся непосредственно напротив окна 140. Позиционирующее устройство ПО позволяет перемещать различные мишени в место измерения напротив окна. Во время этого перемещения мишень 131 по всей ширине может быть перемещена в положение напротив измерительного устройства 300, в результате чего при вращении позиционирующего устройства ПО вдоль плоскости сечения, образованной направлением перемещения, может быть создано поперечное сечение или профиль.
Поскольку планарная поверхность мишени 131 не совпадает с поверхностью цилиндра, точное расстояние можно определить только непосредственно для точки 330 измерений, которая лежит на линии пересечения мишени и цилиндра. С увеличением расстояния между точкой измерений и линией пересечения расстояние между датчиком и поверхностью мишени становится еще меньше, в результате параболически увеличивается искажение топографии в направлении по оси у, а также сжатие в направлении по оси х. Эти искажения можно корректировать с помощью предложенного оценочного устройства 400 с тем, чтобы получить желаемую реальную информацию о поверхности.
Поскольку в результате износа мишени 131 расстояние между точкой 330а измерений и измерительным устройством 300 увеличивается на величину Δl, угол падения лазерного излучения под углом α обзора относительно нормали к поверхности вызывает смещение Δх точки измерений на поверхности. В некоторых вариантах осуществления изобретения это смещение также можно корректировать. В этом случае смещение Δх и текущий износ Δу мишени вычисляют как зависимость угла α падения от измеренного износа Δl мишени согласно следующему уравнению:
Δу=Δl·cosα,
Δх=Δl·sinα.
Измеренный износ Δl мишени по истечении предварительно определяемого времени эксплуатации определяют на основании разности между расстоянием lmeas, измеренным по истечении предварительно определяемого времени эксплуатации, и расстоянием lref, измеренным в начале нанесения покрытия. Соответственно, корректировка параболического искажения согласно изобретению основана на сравнении текущих данных измерений и данных измерений новой, неизрасходованной мишени такого же типа.
В некоторых вариантах осуществления изобретения корректировка может осуществляться на множестве стадий. На первой стадии вычитают контрольные данные lref измерений новой мишени из текущих данных lmeas измерений, чтобы грубо скорректировать данные измерений в направлении по оси у и проецировать параболу на плоскость. Затем на второй стадии осуществляют грубую корректировку в направлении по оси х на основании вычисленной поправочной функции, которую определили, исходя из планарной, т.е. новой, мишени. В этом случае поправочная функция может определяться, исходя из геометрических свойств установки 1 для нанесения покрытия на подложку и мишени 131 или позиционирующего устройства 110. При этом определяют расстояния по оси х между отдельными точками измерений и адаптируют их, исходя из радиуса цилиндра и скорости его вращения в каждой точке измерений, а также из периодичности измерений.
Износ мишени и угол α обзора порождают дополнительные смещения, одним из которых является искажение в направлении по оси у (Δу), а другим - обусловленное им, а также углом падения лазерного излучения дополнительное искажение в направлении по оси х (Δх). Эти дополнительные искажения могут устраняться на третьей стадии корректировки. Положение х точки на новой мишени, а также величина Δl известны из предыдущей корректировки. Таким образом величины Δх и Δу можно вычислить с помощью угла α обзора.
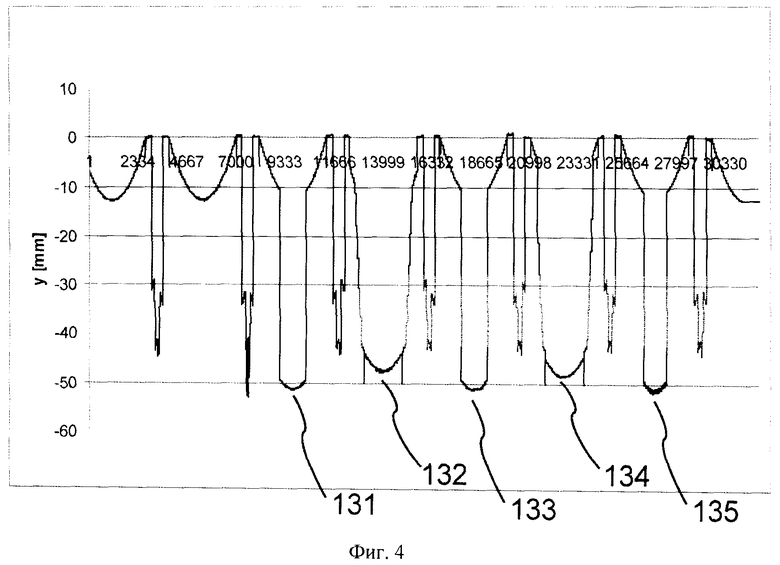
Далее будет рассмотрен один из примеров осуществления способа измерений согласно изобретению. Соответственно, на фиг.4 показаны необработанные данные, регистрируемые измерительным устройством согласно одному из вариантов осуществления изобретения. В проиллюстрированном примере на боковой поверхности цилиндрического позиционирующего устройства ПО расположены пять мишеней 131, 132, 133, 134 и 135. В результате полного оборота позиционирующего устройства 110 каждая мишень один раз перемещается в область обнаружения измерительного устройства 330, в результате чего могут регистрироваться необработанные данные, показанные на фиг.4. В данном случае по оси ординат отложено расстояние между предварительно определяемой неподвижной точкой, которая может определяться, например, положением измерительного устройства 330. По оси абсцисс отложены пронумерованные по порядку точки измерений, которые с использованием угловой скорости и периодичности измерений могут быть преобразованы в х-координату на боковой поверхности цилиндра или х-координату на мишени.
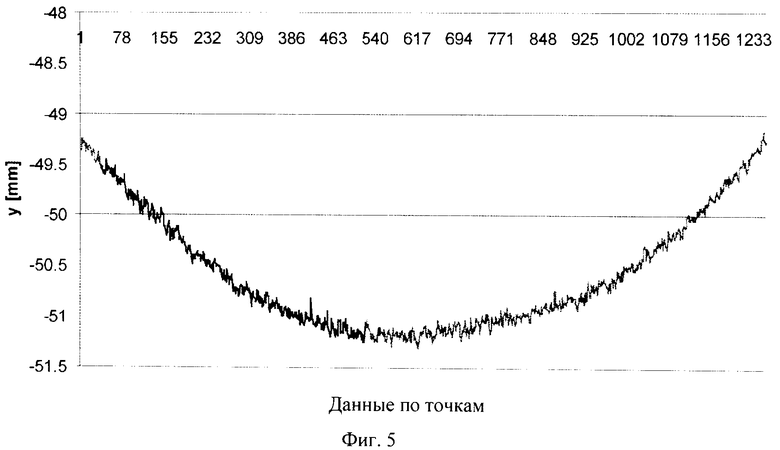
На фиг.5 показан увеличенный фрагмент необработанных данных, показанных на фиг.4. В данном случае показанная на фиг.5 область соответствует измеренным значениям, которые были зарегистрированы на отдельной распыляемой мишени из в общей сложности пяти распыляемых мишеней. Показанные измеренные значения были зарегистрированы на мишени, которая уже использовалась в способе нанесения покрытий и, соответственно, имеет признаки износа. Как показано на фиг.5, этот износ совмещается с геометрическими искажениями в измерительном устройстве и, соответственно, не может быть обнаружен пользователем распылительной системы 1.
На фиг.6 показаны проиллюстрированные на фиг.5 данные после осуществления корректировки согласно изобретению. На фиг.6 видно, что на поверхность мишени имеются две канавки или выемки глубиной приблизительно 0,2-0,3 мм. Соответственно, способом согласно изобретению можно с высокой степенью точности определять износ материала мишени, не прерывая работу установки 1 для нанесения покрытия на подложку.
Изложенное выше описание следует считать не ограничивающим, а поясняющим изобретение. Подразумевается, что какой-либо признак, упоминаемый в описании и следующей далее формулы изобретения, содержится по меньшей мере в одном из вариантов осуществления изобретения. Это не исключает присутствия дополнительных признаков. Любое упоминание в формуле изобретения или описании "первого" и "второго" признаков служит целям различения двух идентичных признаков без предоставления какого-либо преимущества.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ПОВЕРХНОСТЕЙ ВЫСОКОГО КАЧЕСТВА И ИЗДЕЛИЕ С ПОВЕРХНОСТЬЮ ВЫСОКОГО КАЧЕСТВА | 2007 |
|
RU2435871C2 |
| САМООХЛАЖДАЕМЫЙ АВТОНОМНЫЙ НАНОПРИБОР И СПОСОБ ЕГО ФОРМИРОВАНИЯ | 2013 |
|
RU2555512C2 |
| ВАКУУМНАЯ УСТАНОВКА НАПЫЛЕНИЯ ПЛЕНОК С КАМЕРОЙ АБЛЯЦИИ | 2014 |
|
RU2584196C2 |
| ПОКРЫТИЕ ИЗ НИТРИДА УГЛЕРОДА И ИЗДЕЛИЕ С ТАКИМ ПОКРЫТИЕМ | 2007 |
|
RU2467850C2 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ И МЕТАЛЛИЧЕСКОЕ ИЗДЕЛИЕ, СНАБЖЕННОЕ ПОКРЫТИЕМ | 2007 |
|
RU2467092C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПЛЕНОЧНЫХ ПОКРЫТИЙ ПОСРЕДСТВОМ ЛАЗЕРНОЙ АБЛЯЦИИ | 2006 |
|
RU2316612C1 |
| КЮВЕТА ДЛЯ ЛАЗЕРНОЙ АБЛЯЦИИ | 2014 |
|
RU2668079C2 |
| Способ нанесения покрытий путем плазменного напыления и устройство для его осуществления | 2015 |
|
RU2607398C2 |
| СОЛНЕЧНЫЙ ЭЛЕМЕНТ И СПОСОБ И СИСТЕМА ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2467851C2 |
| СПОСОБ ФОРМИРОВАНИЯ МНОГОСЛОЙНЫХ СТРУКТУР ИЗ МАТЕРИАЛА YВaСuО С ДВУХ СТОРОН ПОДЛОЖКИ | 2000 |
|
RU2189090C2 |
Изобретение относится к установке и способу нанесения покрытия на подложку. Установка содержит вакуумную камеру, во внутреннем пространстве которой располагают подложку для нанесения на нее покрытия и по меньшей мере одну распыляемую мишень, и устройство для определения износа распыляемой мишени. Нанесение покрытия осуществляют путем абляции мишени во время работы установки и бомбардировки подложки полученными частицами. В стенке вакуумной камеры имеется по меньшей мере одно окно. Устройство для определения износа распыляемой мишени содержит измерительное устройство для оптического измерения расстояния между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени. Измерительное устройство также содержит оценочное устройство, посредством которого корректируют один из следующего: параллакс или геометрическое искажение планарной поверхности мишени. 2 н. и 11 з.п. ф-лы, 6 ил.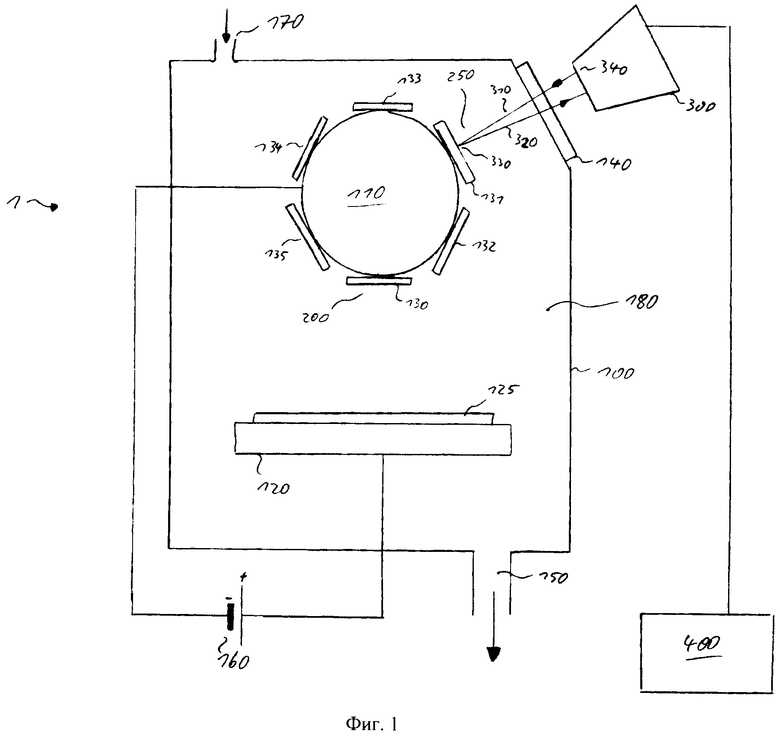
1. Установка для нанесения покрытия на подложку, содержащая:
вакуумную камеру, внутреннее пространство которой приспособлено для размещения подложки для нанесения покрытия и в стенке которой имеется по меньшей мере одно окно,
по меньшей мере одну распыляемую мишень, которая предназначена для абляции во время работы установки путем бомбардировки частицами,
устройство для определения износа распыляемой мишени, содержащее измерительное устройство для оптического измерения расстояния между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени через упомянутое окно, при этом измерительное устройство соединено с оценочным устройством, рассчитанным на корректировку одного из следующего: параллакса или геометрического искажения планарной поверхности мишени.
2. Установка по п. 1, отличающаяся тем, что она содержит позиционирующее устройство для перемещения распыляемой мишени из рабочего положения в положения для измерения.
3. Установка по п. 2, отличающаяся тем, что позиционирующее устройство содержит цилиндр для размещения на его боковой поверхности по меньшей мере одной распыляемой мишени.
4. Установка по п. 1, отличающаяся тем, что измерительное устройство содержит устройство для лазерной триангуляции и/или интерферометр.
5. Установка по любому из пп. 1-4, дополнительно содержащая опору, на которой подвижно установлено измерительное устройство.
6. Установка по любому из пп. 1-4, дополнительно содержащая регулирующее устройство для установления предварительно определяемого желательного значения скорости износа распыляемой мишени, в которое из устройства для определения износа распыляемой мишени вводится измеренное значение, характеризующее состояние распыляемой мишени.
7. Установка по любому из пп. 1-4, отличающаяся тем, что измерительное устройство предназначено для определения расстояния между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и множеством предварительно определяемых точек на поверхности распыляемой мишени.
8. Способ нанесения покрытия на подложку, включающий стадии, на которых:
помещают подложку и по меньшей мере одну распыляемую мишень во внутреннее пространство вакуумной камеры,
подвергают распыляемую мишень абляции путем бомбардировки частицами, определяют износ распыляемой мишени путем оптического измерения расстояния между по меньшей мере одной предварительно определяемой точкой снаружи вакуумной камеры и по меньшей мере одной предварительно определяемой точкой на поверхности распыляемой мишени через окно в стенке вакуумной камеры,
вводят измеренные расстояния в оценочное устройство, которое корректирует по меньшей мере одно из следующего: параллакс и/или оптическое искажение планарной поверхности мишени.
9. Способ по п. 8, отличающийся тем, что напыление прекращают, если распыляемая мишень имеет толщину менее предварительно определяемого значения.
10. Способ по п. 8, в котором корректировка параллакса и/или оптического искажения включает стадии, на которых:
регистрируют расстояние lref, измеренное в начале нанесения покрытия, регистрируют расстояние lmeas, измеренное по истечении предварительно заданного времени нанесения покрытия,
вычисляют lref из lmeas.
11. Способ по п. 8, в котором корректировка параллакса и/или оптического искажения, включает стадии, на которых:
определяют по меньшей мере одну поправочную функцию,
корректируют данные измерений путем применения поправочной функции, в результате чего корректируется искажение в направлении по оси х.
12. Способ по п. 11, отличающийся тем, что определяют на планарной мишени поправочную функцию, отображающую геометрические свойства установки для нанесения покрытия на подложку и мишени.
13. Способ по одному из пп. 8-12, отличающийся тем, что осуществляют точную корректировку данных измерений, исходя из угла α обзора относительно нормали к поверхности мишени и измеренного износа Δ1 мишени согласно следующему уравнению:
Δ y = Δ l· cos α,
Δ x = Δ l· sin α.
| DE10234862A , 12.02.2004 | |||
| Устройство для нанесения покрытий в вакууме | 1991 |
|
SU1812243A1 |
| СПОСОБ НАНЕСЕНИЯ ВАКУУМНЫХ ПОКРЫТИЙ СЛОЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU1828142C |
| ИОННЫЙ МИКРОПРОЕКТОР И СПОСОБ ЕГО НАСТРОЙКИ | 1997 |
|
RU2126188C1 |
| US6500321B1, 31.12.2002 | |||
| US6113752A1, 05.09.2000 | |||

