Изобретение относится к области приборостроения и может найти применение в системах навигации летательных аппаратов (ЛА).
Известна система измерения пространственной ориентации и курса ЛА [1], содержащая блоки инерциальных датчиков, обрабатывающей электроники и вычисления пространственного положения.
Известен также базовый инерциальный измерительный блок [2], содержащий трехосный блок датчиков угловой скорости, трехосный блок датчиков ускорения, блок вычисления приращений угловой ориентации и скорости для преобразования электрических сигналов блока датчиков угловой скорости и блока датчиков ускорения в цифровые значения приращений угловой ориентации и скорости ЛА по трем осям, датчик магнитного поля Земли для получения измерений вектора магнитного поля Земли и вычислитель, на который поступают обработанные цифровые данные со всех датчиков для получения данных о движении ЛА, включая данные об углах пространственного положения, местоположения и курса.
Недостатком известных устройств является их невысокая надежность, т.к. в случае кратковременного пропадания питания во время полета, что допускается для потребителей 2 категории [3], приходится снова проводить начальную выставку системы, т.е. производить начальное угловое согласование, а также производить оценку дрейфов датчиков, что невозможно сделать достаточно точно без использования внешней информации о пространственном положении ЛА.
Задачей, на решение которой направлено изобретение, является повышение надежности системы за счет автоматического восстановления рабочего состояния системы после кратковременного пропадания бортового питания в процессе эволюции пространственного положения ЛА.
Поставленная задача решается за счет того, что в систему для определения пространственного положения и курса ЛА, содержащую блок датчиков угловой скорости, блок датчиков ускорения и трехкомпонентный магнитометр, подключенные через аналого-цифровой преобразователь к вычислителю, согласно изобретению введены устройства обработки аналогового и цифрового сигналов, входы которых соединены с блоком бортового оборудования, а также запоминающее и логическое устройства, выходы которых подключены к вычислителю, при этом вход логического устройства соединен с выходами устройств обработки аналогового и цифрового сигналов.
К существенным отличиям заявленного решения, по сравнению с известными, относится введение устройств обработки аналогового и цифрового сигналов, логического и запоминающего устройств, что позволяет в процессе полета ЛА периодически записывать состояние системы на запоминающее устройство и восстанавливать состояние системы из данных, находящихся в ней, что обеспечивает полную автономность системы за счет использования только собственных датчиков, не прибегая к данным от внешней инерциальной системы, и повышает надежность патентуемой системы.
На чертеже представлена блок-схема предлагаемой системы для определения пространственной ориентации и курса ЛА.
Система для определения пространственной ориентации и курса ЛА содержит блок 1 датчиков угловой скорости, блок 2 датчиков ускорения, трехкомпонентный магнитометр 3, аналого-цифровой преобразователь 4, устройство 5 обработки аналогового сигнала, устройство 6 обработки цифрового сигнала, вычислитель 7, логическое устройство 8, запоминающее устройство 9.
Выходы блока 1 датчиков угловой скорости, блока 2 датчиков ускорения и трехкомпонентного магнитометра 3 через аналого-цифровой преобразователь 4 соединены со входами вычислителя 7. На входы устройства 5 обработки аналогового сигнала и устройства 6 обработки цифрового сигнала подаются информационные сигналы с блока бортового оборудования ЛА, а выходы этих устройств подключены к входу логического устройства 8, которое может входить в состав вычислителя 7, но для наглядности изображено как отдельный блок. Выходы логического устройства 8 и запоминающего устройства 9 подключены ко входам вычислителя 7, с выхода которого снимаются навигационные данные.
Система для определения пространственной ориентации и курса ЛА работает следующим образом.
После подачи питания на систему напряжения с блока 1 датчиков угловых скоростей, пропорциональные скорости вращения ЛА, с блока 2 датчиков ускорений, пропорциональные ускорениям по каждой из 3-х осей, и с трехкомпонентного магнитометра 3, пропорциональные напряженности магнитного поля Земли, с помощью аналого-цифрового преобразователя 4 преобразуются в цифровую форму. В вычислителе 7 происходит расчет крена, тангажа и гиромагнитного курса, с учетом компенсации погрешностей датчиков, а также девиационной погрешности магнитометра 3. Сигналы из бортового оборудования с помощью преобразователя 5 аналогового сигнала и преобразователя 6 цифрового сигнала поступают на логическое устройство 8. Логическое устройство 8 производит сравнение данных аналогового и цифрового сигналов и выдает результирующий сигнал с соответствующим признаком. Вычислитель 7 анализирует сигнал с логического устройства. В случае выдачи сигнала с признаком нахождения на земле, система автоматически переходит в режим начальной выставки. В этом режиме вычислитель 7 проводит оценку смещения нулевого сигнала датчиков угловых скоростей и проводит угловое начальное согласование, после чего записывает эти значения в запоминающее устройство 9. В случае выдачи сигнала с признаком нахождения в полете, вычислитель 7 считывает данные, записанные в запоминающем устройстве 9. Далее проведение начальной выставки блокируется, вычислитель 7 в качестве смещения нулевого сигнала датчиков угловых скоростей использует считанные из запоминающего устройства 9 данные и проводит ускоренное угловое согласование, используя вычисленный магнитный курс и данные с блока 2 датчиков ускорения.
Таким образом, предложенная система повышает надежность пилотажно-навигационного комплекса ЛА, так как предоставляет возможность не переходить в режим начальной выставки в полете после прерывания питания, а сразу выходить в режим автономной работы.
Источники информации
1. D.H.Titterton, J.L.Weston "Strapdown Inertial Navigation Technology" Volume 207 "Progress in Astranautics and Aeronautics" Editor-in-Chief Paul Zarchan, MIT Lincoln Laboratory, USA, 2004, p.p.263-264.
2. Патент США №6522992, МПК G06F 7/00, НПК 702/141, опубликован 18.02.2003 (прототип).
3. ГОСТ 19705-89 «Системы электроснабжения самолетов и вертолетов. Общие требования и нормы качества электроэнергии».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2505786C2 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПОСЛЕ СБОЯ АППАРАТУРЫ | 2020 |
|
RU2754128C1 |
| РЕЗЕРВНАЯ СИСТЕМА ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ВЫСТАВКИ ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2551710C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
Изобретение относится к области приборостроения и может найти применение в системах навигации летательных аппаратов (ЛА). Технический результат - повышение надежности системы за счет автоматического восстановления рабочего состояния системы после кратковременного пропадания бортового питания в процессе эволюции пространственного положения ЛА. Для достижения данного результата система содержит блок 1 датчиков угловой скорости, блок 2 датчиков ускорения, трехкомпонентный магнитометр 3, аналого-цифровой преобразователь 4, устройство 5 обработки аналогового сигнала, устройство 6 обработки цифрового сигнала, вычислитель 7, логическое устройство 8, запоминающее устройство 9. Вновь введенные в систему устройства по сигналам с блока бортового оборудования определяют положение ЛА на земле или в воздухе и в зависимости от этого производится либо запись состояния системы в запоминающее устройство, либо восстановление состояния системы из данных, находящихся в запоминающем устройстве. 1 ил.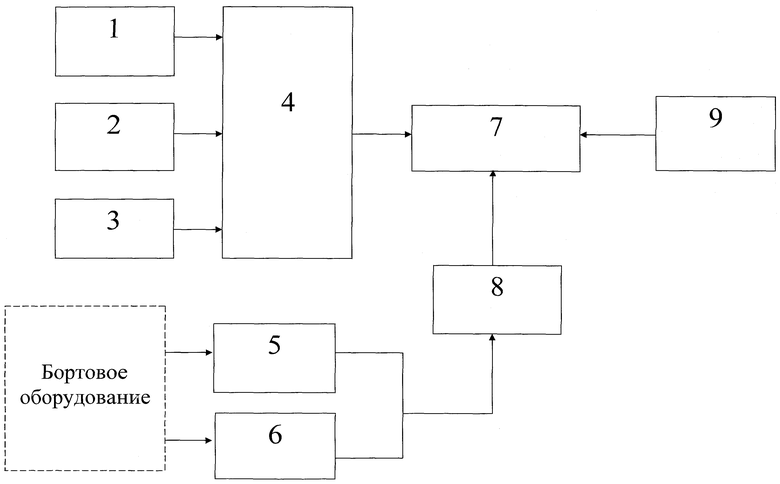
Система для определения пространственной ориентации и курса летательного аппарата, содержащая блок датчиков угловой скорости, блок датчиков ускорения и трехкомпонентный магнитометр, подключенных через аналого-цифровой преобразователь к вычислителю, отличающаяся тем, что в нее введены устройства обработки аналогового и цифрового сигналов, входы которых соединены с блоком бортового оборудования, а также запоминающее и логическое устройства, выходы которых подключены к вычислителю, при этом вход логического устройства соединен с выходами устройств обработки аналогового и цифрового сигналов.
| US 6522992 B1, 18.02.2003 | |||
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285932C1 |
| Авиационная радионавигация | |||
| Справочник под ред | |||
| СОСНОВСКОГО А.А | |||
| - М.: Транспорт, 1990, с.151 | |||
| US 6901331 B1, 31.05.2005. | |||

