Данное изобретение относится к устройству, такому как плавэкскаватор с обратной лопатой, для выемки грунтового материала под водой до установленной глубины. Изобретение также относится к способу выемки грунтового материала под водой, а также к компьютерной программе, содержащей команды программы, предназначенной для выполнения способа.
Устройство, такое как плавэкскаватор с обратной лопатой, как правило, используют для рытья грунта или выемки грунтового материала под водой в местах, где другие дноуглубители, такие как самоотвозные земснаряды с волочащимся грунтоприемником и землесосные снаряды с фрезерными разрыхлителями, подходят меньше. Подобные места включают загруженные подходные каналы, тяжелые типы грунта, (сильные) мелководья и труднодоступные места, например, входы в гавани. Общепризнанный плавэкскаватор с обратной лопатой, как правило, содержит экскаватор (иногда наземный), установленный на понтон. Экскаватор содержит подъемные стрелы, приводимые в действие гидравлическими цилиндрами, и ковш для выкапывания грунтового материала из-под уровня воды. Вынутый грунтовый материал переносят над уровнем воды и опускают в баржу, расположенную поблизости от понтона, и увозят на ней.
Типичный цикл подводной выемки грунта с использованием плавэкскаватора с обратной лопатой включает подготовку обследования состояния подводного дна, причем подобное состояние включает, по меньшей мере, вычерчивание графика глубины дна и/или свойства грунтового материала на обследуемой площади. Затем, составляют производственный план для оператора плавэкскаватора с обратной лопатой и экскаватора, приблизительно принимая в расчет состояние площади дна, на которой планируется выемка грунта, и требуемое состояние площади дна (как правило, требуемый профиль глубины). Производственный план включает определение линий, вдоль которых должен располагаться понтон, а также задание приблизительного обозначения глубины экскавации вдоль указанных линий. Затем, оператор проводит донноуглубительные работы на площади дна, которые включают, как правило, стадии расположения понтона на линии, на которой планируются донноуглубительные работы, выемку грунтового материала по линии, перестановку понтона на другую линию, на которой планируются донноуглубительные работы, и повторение изложенного выше.
Однако, поскольку свойства грунта известны только в очень разбросанных точках, данный подход является всего лишь усредненным. Фактические действия по выемке грунта определяются в зависимости от ощущений оператора на основании очень субъективной обратной связи (ответный уровень шума, вибрации, движения экскаватора и т.д.) и на основании своего предыдущего опыта в аналогичных ситуациях. Эффективность производства донноуглубительных работ требует усовершенствования.
Задачей настоящего изобретения является устранение недостатков описанного выше устройства и способа предыдущего уровня техники и создание устройства и способа для выемки грунтового материала под водой, который предоставляет возможность более высокой эффективности работы.
В одном аспекте изобретения, таким образом, предложено устройство для выемки грунтового материала под водой, причем устройство содержит:
- понтон, оснащенный экскаватором, выполненным с возможностью копать грунт под водой;
- исполнительные средства, выполненные с возможностью управления движением понтона и/или экскаватора;
- первое контролирующее средство, выполненное с возможностью отслеживать положение экскаватора;
при этом устройство дополнительно содержит
- второе контролирующее средство, выполненное с возможностью отслеживать нагрузки, испытываемые экскаватором; и
- компьютерное средство, выполненное с возможностью рассчитывать на основании данных, полученных от первого и второго контролирующих средств, управляющие сигналы для исполнительных средств.
Устройство согласно изобретению обеспечивает возможность быстро и точно вынимать грунтовый материал под водой до предварительно заданного профиля глубины, при этом глубина и/или положение в плоскости экскавации регулируются автоматически, в зависимости от фактического положения экскаватора и значений нагрузки, полученных от второго контролирующего средства. Движение понтона включает выравнивание понтона.
Изобретение также относится к способу выемки грунтового материала под водой, причем способ включает стадии, на которых:
- обеспечивают устройство согласно изобретению;
- размещают понтон в воде;
- управляют движением экскаватора посредством исполнительных средств таким образом, чтобы происходила выемка грунта под водой;
- отслеживают положение экскаватора и нагрузок, испытываемых экскаватором в процессе его движения;
- вычисляют на основании данных, полученных от первого и второго контролирующих средств, управляющие сигналы для исполнительных средств;
причем экскаватор перемещается согласно данным управляющим сигналам.
Способ согласно изобретению особенно полезен для оптимизации работы по выемке грунта вдоль одной линии резания, т.е. в варианте осуществления, когда сам понтон находится во (временно) неподвижном положении. Способ изобретения устраняет по существу нестабильность, связанную с действием персонала, за счет предоставления контура управления, в котором движением экскаватора управляют в виде функции его фактического положения и фактических нагрузок, испытываемых экскаватором.
Устройство и способ изобретения обеспечивают возможность уменьшения времени простоя по причине перегруженных производственных систем, защиты от перегрузки и поддержания на более постоянном уровне качества выемки грунта с течением времени. Также, устройство и способ изобретения позволяют принимать в расчет варьирование особенностей седиментации грунта (причиной подобного варьирования является сама природа седиментации), которые неизвестны в достаточной мере, вследствие довольно низкой разрешающей способности сетки при взятии образцов.
В дополнительном аспекте изобретения предложено устройство, в котором компьютерное средство выполнено с возможностью рассчитывать управляющие сигналы для исполнительных средств таким образом, чтобы минимизировать критерий оптимальности. Критерий оптимальности можно выбирать произвольно. В особенно предпочтительном устройстве критерий оптимальности включает среднюю мощность экскаватора, использованную на единицу объема, вынутого грунтового материала. Мощность экскаватора можно легко получить посредством умножения моментальных смещений экскаватора и нагрузок, испытываемых экскаватором, и суммирования данных результатов умножения. Например, мощность экскаватора можно минимизировать или удерживать ниже значения определенного порогового уровня за счет уменьшения нагрузок. Уменьшение нагрузок может быть достигнуто за счет ограничения скорости выемки грунта и/или глубины резания экскавации, при этом глубина резания представляет собой глубину, на которую ковш погружают в грунт. В целом, нагрузки зависят также от свойств грунта, причем следствием более плотного или тяжелого грунта являются большие нагрузки, и наоборот.
В еще одном аспекте изобретения предложено устройство, в котором критерий оптимальности включает максимальное, вероятно, ожидаемое время осуществления выемки на единицу объема вынутого грунтового материала.
Типичный плавэкскаватор с обратной лопатой оборудован экскаватором, содержащим стрелу, выполненную с возможностью поворачивания на фундаменте, имеющемся на палубе понтона, рукоять, имеющую возможность поворачивания на одном конце стрелы, и ковш, имеющий возможность поворачивания на одном конце рукояти. Поворотное движение стрелы относительно понтона, рукояти относительно стрелы и ковша относительно рукояти осуществляют с помощью гидравлических цилиндров, предусмотренных на фундаменте понтона, на стреле и на рукояти, соответственно. Плавэкскаватор с обратной лопатой предпочтительно имеет следующие степени подвижности для выполнения своих задач:
- 3 вида поворачивания экскаватора вокруг горизонтальной оси (соответствующие 3 центрам поворота основному, рукояти и ковша: они обеспечивают возможность располагать ковш в определенном месте под водой, погружать его в грунт (изменять направление) и поднимать материал над водой;
- 1 поворот вокруг вертикальной оси: данная степень подвижности обеспечивает угловое позиционирование ковша, а также транспортировку от материнской породы до баржи поодаль;
- 1 горизонтальное поступательное движение (шаг): когда выкапывание грунта в пределах достижения экскаватора было закончено, необходимо перемещение понтона в следующее положение, его называют пошаговое передвижение и выполняют посредством перемещения одной из папильонажных свай понтона;
- 3 вертикальных поступательных перемещения, обеспечивающих подъем и устойчивость и предоставляющие возможность выравнивания понтона (необходимое горизонтальное положение).
В определенных условиях для распределения веса с целью обеспечения горизонтального выравнивания понтона могут быть использованы, например, дифферентные цистерны. Определенные вращения вокруг вертикальных осей в пределах определенной зоны приводят к характерному дуговому шаблону выемки вокруг центральной точки, что соответствует повороту стрелы. Благодаря пошаговому характеру перемещения понтона общие шаблоны представляют собой линии резания, следующие друг за другом на одной и той же или изменяющейся глубине вдоль центральной линии или без центральной линии.
Устройство и способ согласно изобретению обеспечивают возможность точно выкапывать грунт под водой в соответствии с предварительно заданным профилем глубины. При экскавации дна водоема, такого как морское дно или судоходный маршрут около пристани, говоря в общем, чрезвычайно опасно производить земляные работы на морском дне или судоходном маршруте за пределами предусмотренной глубины экскавации, потому что подобная глубокая экскавация может разрушить основание пристани или стенок, сформированных в морском дне. При слишком глубокой экскавации возникает необходимость восстановить подобный участок с излишне проведенной выемкой грунта, что, однако, требует дополнительных трудозатрат и времени. Устройство и способ согласно изобретению помогают предотвратить данный недостаток.
В еще одном аспекте изобретения предложено устройство, в котором экскаватор содержит подъемные стрелы, приводимые в действие посредством гидравлических цилиндров, которые являются частью гидравлической схемы, а второе контролирующее средство содержит датчики гидравлического давления, выполненные с возможностью измерять давление в гидравлической схеме и/или цилиндрах. Датчики гидравлического давления сами по себе известны, но не в контексте управления движением, например, плавэкскаватора с обратной лопатой.
В другом аспекте изобретения предложено устройство, в котором экскаватор содержит подъемные стрелы, приводимые в действие посредством гидравлических цилиндров, которые являются частью гидравлической схемы, а первое контролирующее средство содержит датчики перемещения, выполненные с возможностью измерять относительное перемещение подъемных стрел.
Несмотря на то, что в принципе для выполнения способа согласно изобретению достаточно предоставления первого и второго контролирующих средств, предпочтительным является устройство, содержащее третье контролирующее средство, выполненное с возможностью отслеживать положение понтона. Таким образом, перемещение экскаватора может быть соотнесено с состоянием подводного дна, которое изображено на диаграмме обследования, причем подобное состояние включает, по меньшей мере, профиль глубины дна и/или свойства грунтового материала в интересующей области. На самом деле, результатом обследования, проведенного перед фактическим началом работы по выемке грунта, является профиль глубины. После прохождения плавэкскаватора с обратной лопатой и имея информацию о количестве вынутого грунтового материала, можно вычислить новую локальную глубину. Посредством отслеживания положения понтона вдобавок к положению экскаватора получают обновленный профиль глубины.
В одном аспекте изобретения предложено устройство, в котором третье контролирующее средство содержит систему глобального позиционирования.
В еще одном аспекте изобретения устройство содержит входное/выходное устройство, выполненное с возможностью передачи сигналов от первого контролирующего средства в компьютерное средство.
В еще одном аспекте изобретения устройство содержит входное/выходное устройство, выполненное с возможностью передачи сигналов от второго и третьего контролирующих средств в компьютерное средство.
В еще одном аспекте изобретения устройство содержит устройство отображения, выполненное с возможностью отображать положение экскаватора и/или понтона, а также нагрузок, испытываемых экскаватором.
В еще одном аспекте изобретения устройство содержит устройство отображения, выполненное с возможностью отображать глубину грунта под водой.
Перечисленные выше и другие задачи, признаки и преимущества настоящего изобретения станут понятны из следующего описания и прилагаемой формулы изобретения, приведенных с сопровождающими чертежами, на которых:
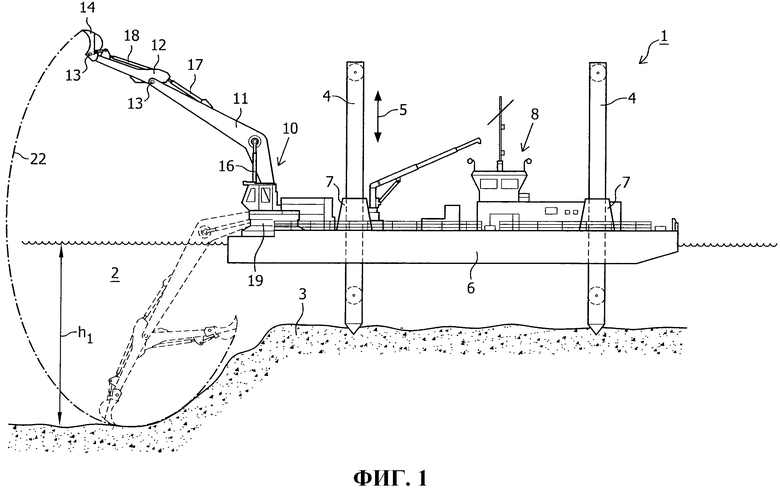
Фиг.1 представляет собой вид сбоку профиля конструкции судна с гидравлической обратной лопатой;
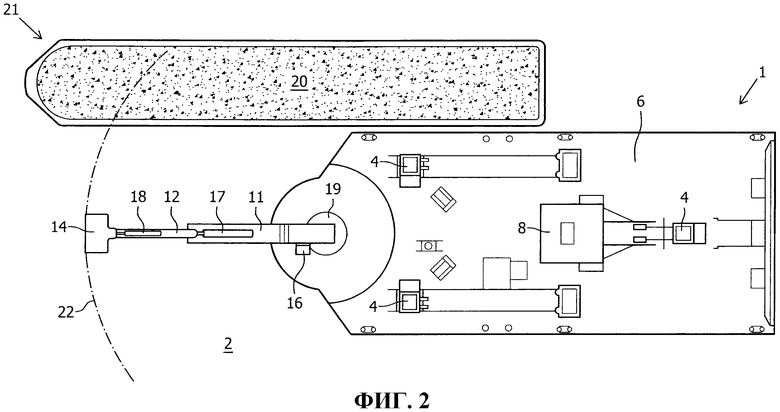
Фиг.2 представляет собой вид сверху судна с обратной лопатой, показанного на Фиг.1;
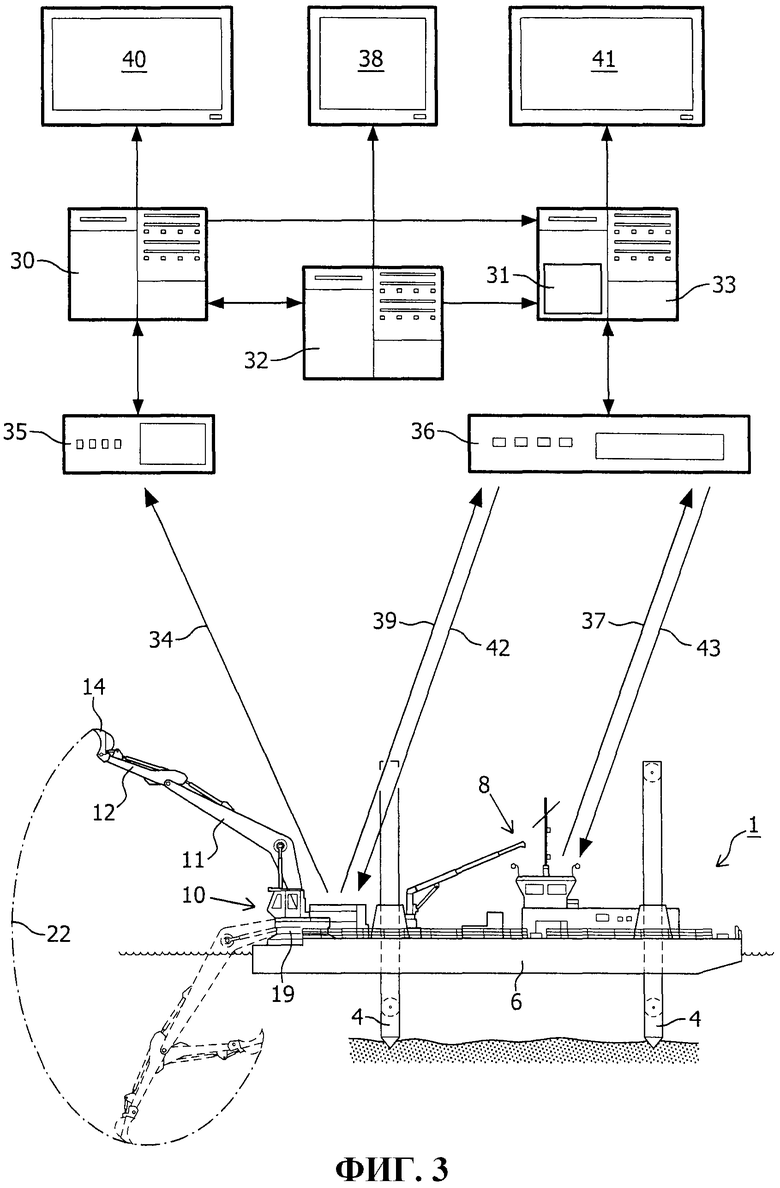
Фиг.3 представляет собой схематический чертеж устройства согласно варианту осуществления изобретения; а
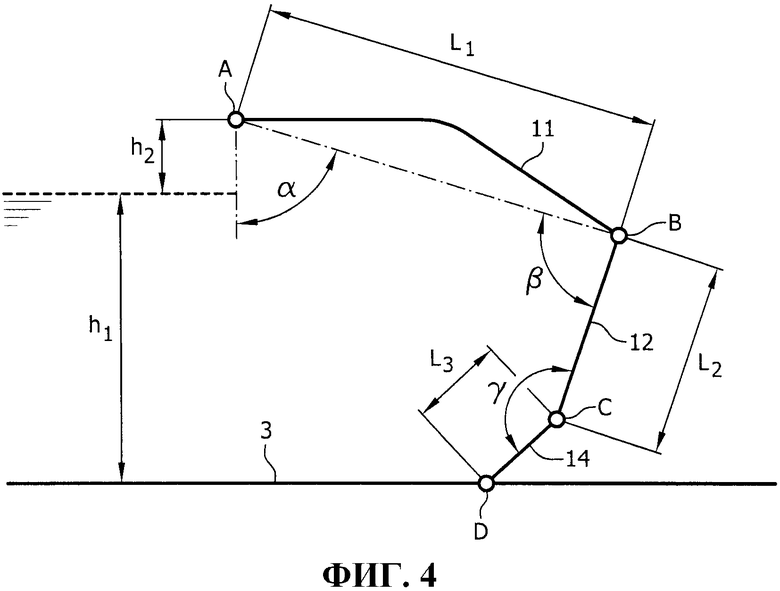
Фиг.4 схематически отображает степени подвижности экскаватора согласно варианту осуществления изобретения.
На фиг.1 схематически показано судно 1 с гидравлической обратной лопатой. Судно 1 с обратной лопатой содержит понтон 6, который расположен в воде 2 над дном 3 водоема, в котором планируются дноуглубительные работы. Понтон 6 обеспечен рядом папильонажных свай 4, которые могут опираться на дно 3 водоема. Понтон 6 удерживается на папильонажных сваях 4 за счет ряда шарнирных соединений 7 таким образом, чтобы понтон 6 мог плавно двигаться вверх и вниз в вертикальном направлении 5 вдоль папильонажных свай 4, но его перемещение горизонтально по воде 2 было по существу ограничено. Понтон 6 поднимается вдоль папильонажных свай 4, когда уровень воды в результате прилива поднимается, и опускается вдоль папильонажных свай 4, когда уровень воды в результате отлива понижается. Глубина h1 дна 3 водоема (а также расстояние между дном 3 водоема и понтоном 5) может, вследствие этого, изменяться в соответствии с приливным уровнем. Судно 1 с обратной лопатой дополнительно оборудовано капитанским мостиком 8, который содержит, по меньшей мере, исполнительное средство, выполненное с возможностью управления движением понтона 6 и экскаватора 10 с обратной лопатой.
Экскаватор 10 с обратной лопатой содержит стрелу 11, шарнирно опирающуюся на палубу понтона 6, рукоять 12, опирающуюся на стрелу 11 с возможностью поворачивания вокруг шарнира 13, и ковш 14, опирающийся на рукоять 12 с возможностью поворачивания вокруг шарнира 15. Подъемные стрелы (11, 12) и ковш 14 экскаватора 10 приводятся в действие с помощью гидравлических цилиндров (16, 17 и 18), которые являются частью гидравлической схемы (не показанной). В показанном варианте осуществления степени подвижности плавэкскаватора 10 с обратной лопатой для выполнения его задач включают 3 поворота экскаватора вокруг горизонтальной оси, соответствующие 3 центрам поворота стрелы 11, рукояти 12 и ковша 14, и приводятся в действие с помощью гидравлических цилиндров (16, 17 и 18). Они обеспечивают возможность располагать ковш 14 в определенном месте под водой, как показано в виде положения пунктирной линией на фиг.1, погружать его в грунт за счет изменения направления и поднимать грунтовый материал над водой 2. Другая степень подвижности включает вращение стрелы 11 вокруг поворотного основания 19. Данная степень подвижности обеспечивает возможность вращательного позиционирования ковша 14, а также транспортировку вынутого грунтового материала 20 в баржу 21, находящуюся поодаль от понтона 6, как показано на фиг.2. Еще одна степень подвижности включает горизонтальное поступательное движение понтона 6 («шаг»). Когда выемка грунтового материала 20 в пределах зоны досягаемости 22 экскаватора 10 заканчивается, необходимо переместить понтон 6 в следующее положение - процесс, называемый «пошаговое перемещение». Это достигается посредством втягивания, по меньшей мере, одной из папильонажных свай 4 понтона 6 со дна 3, перемещения (или поворачивания) понтона 6 и снова опускания папильонажной сваи 4 на дно 3 для закрепления понтона 6 в его новом положении. Также есть возможность добавить 3 другие степени подвижности, которые представляют собой вертикальные поступательные движения понтона 6 вдоль папильонажных свай 4, обеспечивая подъем и равновесие и обеспечивая возможность выравнивания понтона 6 по существу в горизонтальном положении.
Плавэкскаватор 1 с обратной лопатой содержит исполнительные средства (7, 16, 17, 18, 19), выполненные с возможностью управлять перемещением понтона 6 и экскаватора 10. Исполнительное средство среди прочего содержит шарнирные соединения 7 для папильонажных свай 4 и приводное средство (не показано) для позиционирования понтона 6, а также поворотного основания 19 и гидравлических цилиндров (16, 17, 18), которые образуют часть гидравлической схемы, управляющей движением экскаватора 10. Исполнительными средствами (7, 16, 17, 18, 19) управляют посредством компьютерного средства, как будет более подробно описано далее ниже.
На фиг.3 показан плавэкскаватор 1 с обратной лопатой, оборудованный первым контролирующим средством (30, 35), выполненным с возможностью отслеживания положения экскаватора 10 и, в частности, положения его ковша 14, вторым контролирующим средством 31, выполненным с возможностью отслеживать нагрузки, испытываемые экскаватором 10, третьим контролирующим средством 32, выполненным с возможностью отслеживать положение понтона 6, и компьютерным средством 33, выполненным с возможностью рассчитывать на основании данных, полученных от первого и второго контролирующих средств (30, 31), управляющие сигналы для исполнительных средств (7, 16, 17, 18, 19) для передачи сигналов положения экскаватора от первого контролирующего средства в компьютерное средство.
Первые контролирующие средства (30, 35) содержат ряд позиционных и/или угловых датчиков (не показанных), установленных в нескольких положениях на экскаваторе 10. Фигура 4 схематично показывает типичную конфигурацию, показывающую центр вращения А стрелы 11, опирающейся на палубу понтона 6, центр вращения В рукояти 12, опирающейся на стрелу 11, центр вращения С ковша 14, опирающегося на рукоять 12, переднюю кромку D ковша 14. Также показана длина L1 линии А-В, длина L2 линии В-С, длина L3 линии С-D, угол α между вертикальной линией и линией А-В, угол ß между линией А-В и линией В-С и угол γ между линией В-С и линией С-D. Кроме того, h1 определяет существующую глубину дна 3, а h2 высоту центра вращения А относительно уровня воды. Для иллюстрации, глубина h1 экскавации от уровня воды может быть легко выражена в виде функции углов α, ß и γ, и длин L1, L2, L3, а также высоты h2. Поскольку длины L1, L2, L3 и высота h2 известны, глубина h1 экскавации относительно уровня воды может быть определена при определении относительных углов α, ß и γ посредством подходящего определителя углов. Сигналы 34 углов, генерируемые посредством датчиков определения углов, передаются через подходящее входное/выходное устройство 35 в блок 30 обработки первого контролирующего средства, содержащий, по меньшей мере, память для хранения данных сигналов углов. При необходимости положение экскаватора 10 может быть визуально выведено на дисплей для оператора плавэкскаватора 1 с обратной лопатой.
Третье контролирующее средство (32, 36), выполненное с возможностью отслеживать положение понтона 6, содержит систему 32 динамического позиционирования/динамического слежения (DP/DT), входное/выходное устройство 36, выполненное с возможностью передачи сигналов положения и/или нагрузок от второго и/или третьего контролирующих средств в компьютерное средство, и ряд датчиков положения (не показаны). Система 32 DP/DT предоставляет возможность оператору плавэкскаватора с обратной лопатой наблюдать в режиме он-лайн через устройство 38 отображения диаграмму профиля глубины дна. Подобный профиль получают посредством ввода батиметрических данных, полученных заранее, в систему 32 DP/DT. Профиль глубины дна 3 обновляется в реальном времени в результате производства дноуглубительных работ. Система 32 DP/DT также включает глобальную систему позиционирования, предоставляющая возможность локализации глобального положения понтона 6. Когда плавэкскаватором 1 с обратной лопатой управляют вручную, в целом, полагаются на описанный выше набор контролирующего оборудования. Поскольку оператор работает ниже уровня воды, видимость ковша 14 является нулевой. Вследствие этого, оператор вынужден полагаться на визуализацию в реальном времени понтона 6 и особенно экскаватора 10. Первые контролирующие средства (30, 35), основанные на датчиках для отслеживания стрелы/рукояти/ковша и углов отклонения/поворота, предоставляют часть входных данных. Такая информация объединяется с координатами системы для восстановления положения ковша. При объединении данной информации с сигналом глобальной системы позиционирования от системы 32 DP/DT получается визуализация в реальном времени положения ковша 14 относительно дна 3.
Согласно изобретению, второе контролирующее средство 31 выполнено с возможностью отслеживания нагрузок, испытываемых экскаватором 10, и содержит ряд датчиков силы или давления (не показаны), обычно включаемых в гидравлические цилиндры (16, 17, 18). Сигналы 39 сил, происходящие от датчиков, передаются через входное/выходное устройство 36 в компьютерное средство (31, 33) для дальнейшей обработки. При необходимости может быть предоставлено устройство 41 отображения, выполненное с возможностью отображения сигналов 39 нагрузок, испытываемых экскаватором 10. Управляющие сигналы (42, 43), генерируемые с помощью компьютерного средства (33), могут также выводиться на устройство 41 отображения.
Компьютерное средство (33) выполнено с возможностью рассчитывать на основании параметров (34, 37) сигналов положения, полученных от первого и третьего контролирующих средств (30, 32), а также на основании параметров (39) сигналов силы, полученных от второго контролирующего средства 31, управляющие сигналы (42, 43) для исполнительных средств (7, 16, 17, 18, 19).
Существует множество параметров, вовлеченных в выемку грунта со дна 3. Как правило, обследование профиля глубины дна 3 водоема выполняют, сперва, посредством сбора батиметрических данных и сохранения их в системе 32 DP/DT. Необходимый профиль выемки грунта зависит от множества показателей, таких как подводная стабильность дна 3 и реологические свойства грунтового материала. Другие факторы, которые могут быть важными, включают конструктивные аспекты оборудования для дноуглубительных работ (уровни максимальной нагрузки и т.п.), устойчивость судна, позиционное регулирование, характер прилива и течения воды и другие. Устройство, согласно изобретению, предоставляет возможность учитывать большую часть данных параметров за счет предоставления системы управления с обратной связью, в которой данные положения и нагрузки связаны с компьютерными сигналами оптимизации исполнительных механизмов. Данные нагрузки являются результатом действия большого числа имеющих важное значение параметров, относящихся к особенностям дна и грунта, что делает учет этих данных нагрузки особенно полезным для существующей цели. Изобретение не ограничено выбором конкретного критерия оптимальности и может фактически использовать любой критерий, который представляется подходящим. Предпочтительно, критерий оптимальности включает среднюю мощность экскаватора, используемую на единицу объема вынутого грунтового материала, или максимальное, вероятно, ожидаемое время осуществления выемки на единицу объема вынутого грунтового материала. Обычные ограничения включают динамические ограничения, такие как ограничения мощности и нагрузки.
Далее будут описаны алгоритмы, загружаемые в компьютерное средство. Так как понтон является по существу устойчивым в своем начальном положении, выполняется модель осуществления дноуглубительных работ, загруженная в компьютерное средство. Модель осуществления дноуглубительных работ включает алгоритм контурного управления геометрической траекторией, известный как таковой. Подобный алгоритм основан на траекториях, которые предложены лучшими руководствами по практическому обучению и/или проектировочными таблицами мощностей для заданной компоновки экскаватора (т.е. комбинации стрелы/рукояти/ковша). Входные данные для алгоритма предоставляют из результатов обследования дна и первого наилучшего выбора траектории для экскаватора, включая глубину и зону досягаемости ковша. При этом зона досягаемости означает расстояние от центра вращения экскаватора до положения, где ковш соприкасается с грунтом. Выходные данные алгоритма обеспечивают кинематику экскаватора, которая предоставляет необходимые углы стыковки стрелы/рукояти/ковша на каждой стадии экскавации.
Второй алгоритм использует теорию резания грунта для расчета нагрузок, испытываемых составными элементами экскаватора, в результате взаимодействия между ковшом и грунтом (когда ковш фактически движется сквозь грунт), и теорию движения донных наносов для расчета нагрузок, прикладываемых потоками воды на погруженные части экскаватора. Результатом данной модели являются общие ожидаемые нагрузки, с которыми сталкивается экскаватор в процессе произведения дноуглубительных работ. Выходные данные обеспечивают целостную модель стартовой точки, от которой продолжается работа.
Стартовую точку предпочтительно выбирают на основании наиболее подходящей комбинации глубины резания, скорости резания и зоны досягаемости или длины срезки. Как правило, длину срезки выбирают на уровне приблизительно 65% от максимальной зоны досягаемости на конкретной глубине, причем приемлемый в целом минимум составляет 6 м.
Когда описанные выше два алгоритма загружают в компьютерное средство и начинают экскавацию, измерения нагрузок и кинематических параметров обеспечивают возможность повторного расчета рабочих параметров, предпочтительно глубины экскавации, скорости экскавации и зоны досягаемости ковша. Зная выходные данные описанных выше двух моделей, а также номинальные нагрузочные способности отдельных гидравлических составных элементов экскаватора, оператор экскаватора может оптимизировать работу по выемке грунта посредством ограничения нагрузок в экскаваторе на каждой стадии за счет возврата к установкам исполнительного механизма для того, чтобы не превышать максимально допустимые номинальные нагрузочные способности. Максимально допустимые номинальные нагрузочные способности гидравлических составных элементов, таких как гидравлические цилиндры, предоставляются производителем данных составных элементов, и, например, для гидравлического цилиндра заданы в показателях создания максимального давления p и расхода Q. Заданная скорость, при которой изменяются нагрузки в гидравлической системе, являющейся довольно статической системой (управляемой оператором), будет всегда пытаться оказывать воздействие слишком поздно. Кроме того, следствием сочетания исполнительных механизмов, гидравлической системы и экскаваторной системы/взаимодействия реального окружения будет в значительной степени нелинейная система.
В связи с этим, перед работами предпочтительно проводят ряд экспериментов без обратной связи, которые устанавливают соотношение параметров исполнительных механизмов с характеристиками гидравлической системы (измерения давления p и нормы расхода Q) и считываний измерительных приборов геометрических величин (т.е. измерительных устройств стандартных углов, которые измеряют углы стыковки стрелы/рукояти/ковша). Они будут служить в качестве входных данных для уточненной изменяющейся идентификации инструментов, следствием чего будет пропорционально-интегральный и управляющий алгоритм для каждого стыка в экскаваторной системе. После того, как стали известны параметры, нелинейный алгоритм управления (т.е. пропорционально-интегральный и управляющий алгоритм) может регулировать стыковочные углы с использованием обратной связи от устройств измерения углов на стыке без необходимости в дополнительных датчиках давления или подачи, оставаясь в то же время максимально близко к допустимым гидравлическим установкам для каждого составного элемента системы.
Изобретение не ограничено каким-либо алгоритмом оптимизации, которых может быть использовано множество. Подобные алгоритмы, в целом, известны квалифицированным специалистам и в большинстве случаев минимизируют некоторую функцию f(x) при соблюдении такого условия, как h(x)≥0. В настоящем варианте осуществления функция f(x) может, например, представлять собой среднюю мощность экскаватора, использованную на единицу объема вынутого грунтового материала. Условие h(x)≥0 может, например, представлять собой условие, что глубина h(x) ковша 14 должна быть больше, чем определенная глубина h1. Затем условие становится h1-h(x)≥0 (когда глубины задают отрицательными числами). Схему оптимизации запускают, выбирая начальные значения для х, и рассчитывают направления поиска ∆х, используя численные алгоритмы, такие как хорошо известный метод Ньютона. Затем, делают шаг к новой точке и вычисления повторяют до тех пор, пока не будет найден минимум. В контексте настоящего изобретения результатом выходного значения схемы оптимизации является следующее движение ковша 14 экскаватора 10, включающее в себя горизонтальное и вертикальное движение, углы наклона, определяющие углы атаки и скорость движения. Таким образом, становится возможно сделать максимальной производительность и получить более равномерное качество. Дополнительное преимущество состоит в том, что в процессе проведения дноуглубительных работ, получая данные нагрузки, также получают данные о свойствах грунта. Вследствие этого, способ и устройство согласно изобретению также предоставляют возможность непрерывно обновлять свойства грунта, полученные ранее посредством батиметрических данных.
Компьютерное средство 33 по существу управляет движением экскаватора 10 и, в частности, его ковша 14, а также движением понтона 6 за счет генерирования управляющих сигналов (42, 43) для экскаватора 10 и понтона 6, соответственно. В частности, после размещения понтона 6 производят выемку грунта в области в пределах зоны досягаемости экскаваторных стрел (11, 12) за счет автоматического опускания ковша 14 до расчетной глубины, за счет расположения ковша 14 и соскабливания грунтового материала 20, чтобы поместить ковш 14 на необходимый уровень, а затем поднятия ковша 14 и поворачивания его, чтобы опорожнить его содержимое в баржу 21. Во время паузы рассчитывают новое положение с помощью способа оптимизации и ковш 14 поворачивают в данное оптимальное следующее положение. После выемки грунта в зоне в пределах досягаемости экскаватора 10 понтон 6 перемещают «пошаговым образом» в следующее положение, которое также рассчитывают с помощью алгоритма оптимизации, и цикл повторяют.
Вышеописанное раскрытие было изложено исключительно для пояснения изобретения и не предназначено для его ограничения. Поскольку у квалифицированных специалистов в данной области могут возникнуть модификации раскрытых вариантов осуществления, охватывающие сущность и предмет изобретения, изобретение должно истолковываться с включением всего в пределах объема правовых притязаний приложенной формулы изобретения и ее эквивалентов.
Изобретение относится к устройству для выемки грунтового материала под водой. Техническим результатом является повышение эффективности производства донноуглубительных работ. Устройство содержит понтон, оснащенный экскаватором, выполненным с возможностью копания грунта под водой, исполнительные средства, выполненные с возможностью управления перемещением понтона и/или экскаватора, первое контролирующее средство, выполненное с возможностью отслеживания положения экскаватора. При этом плавэкскаватор с обратной лопатой также содержит второе контролирующее средство, выполненное с возможностью отслеживания нагрузки, испытываемой экскаватором, и третье контролирующее средство, выполненное с возможностью отслеживания положения понтона, компьютерное средство, выполненное с возможностью рассчитывания на основании данных, полученных от первого, второго и третьего контролирующих средств, управляющие сигналы для исполнительных средств. 2 н. и 13 з.п. ф-лы, 4 ил.
1. Плавэкскаватор с обратной лопатой для выемки грунтового материала под водой, содержащий:
- понтон, оснащенный экскаватором, выполненным с возможностью копания грунта под водой;
- исполнительные средства, выполненные с возможностью управления перемещением понтона и/или экскаватора;
- первое контролирующее средство, выполненное с возможностью отслеживания положения экскаватора;
при этом плавэкскаватор с обратной лопатой также содержит:
- второе контролирующее средство, выполненное с возможностью отслеживания нагрузки, испытываемой экскаватором; и
- третье контролирующее средство, выполненное с возможностью отслеживания положения понтона;
- компьютерное средство, выполненное с возможностью рассчитывания на основании данных, полученных от первого, второго и третьего контролирующих средств, управляющие сигналы для исполнительных средств.
2. Плавэкскаватор с обратной лопатой по п. 1, в котором компьютерное средство выполнено с возможностью рассчитывания управляющих сигналов для исполнительных средств таким образом, чтобы минимизировать критерий оптимальности.
3. Плавэкскаватор с обратной лопатой по п. 2, в котором критерий оптимальности включает среднюю мощность экскаватора, используемую на единицу объема вынутого грунтового материала.
4. Плавэкскаватор с обратной лопатой по п. 2, в котором критерий оптимальности включает максимальное, вероятно, ожидаемое время осуществления выемки на единицу объема вынутого грунтового материала.
5. Плавэкскаватор с обратной лопатой по п. 1, в котором экскаватор содержит подъемные стрелы, приводимые в движение гидравлическими цилиндрами, частью гидравлической схемы, а второе контролирующее средство содержит датчики гидравлического давления, выполненные с возможностью измерения давления в гидравлической схеме и/или цилиндрах.
6. Плавэкскаватор с обратной лопатой по п. 1, в котором экскаватор содержит подъемные стрелы, приводимые в движение гидравлическими цилиндрами, которые являются частью гидравлической схемы, а первое контролирующее средство содержит датчики перемещения, выполненные с возможностью измерения относительного перемещения подъемных стрел.
7. Плавэкскаватор с обратной лопатой по п. 1, в котором третье контролирующее средство содержит глобальную систему позиционирования.
8. Плавэкскаватор с обратной лопатой по п. 1, содержащее входное/выходное устройство, выполненное с возможностью передачи сигналов от первого контролирующего средства в компьютерное средство.
9. Плавэкскаватор с обратной лопатой по п. 1, содержащее входное/выходное устройство, выполненное с возможностью передачи сигналов от второго и/или третьего контролирующих средств в компьютерное средство.
10. Плавэкскаватор с обратной лопатой по п. 1, содержащее устройство отображения, выполненное с возможностью отображения положения экскаватора и/или понтона, а также нагрузки, испытываемой экскаватором.
11. Плавэкскаватор с обратной лопатой по п. 1, содержащее устройство отображения, выполненное с возможностью отображения глубины грунта под водой.
12. Способ выемки грунтового материала под водой, включающий стадии, на которых осуществляют:
- обеспечение плавэкскаватора с обратной лопатой в соответствии с п. 1;
- размещение понтона в воде;
- управление перемещением экскаватора посредством исполнительных средств таким образом, чтобы происходила выемка грунта под водой;
- отслеживание положения экскаватора и нагрузок, испытываемых экскаватором, в процессе его перемещения;
- вычисление на основании данных, полученных от первого, второго и третьего контролирующих средств, управляющих сигналов для исполнительных средств;
при этом экскаватор перемещается согласно данным управляющим сигналам.
13. Способ по п. 12, в котором управляющие сигналы для исполнительных средств рассчитывают таким образом, чтобы минимизировать критерий оптимальности.
14. Способ по п. 13, в котором критерий оптимальности включает среднюю мощность экскаватора, используемую на единицу объема вынутого грунтового материала.
15. Способ по п. 13, в котором критерий оптимальности включает максимальное, вероятно, ожидаемое время осуществления выемки на единицу объема вынутого грунтового материала.
| ВОЗДУШНЫЙ ФИЛЬТР ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1965 |
|
SU215659A1 |
| US 20070255494 A1, 01.11.2007 | |||
| Способ фазового анализа соединений сурьмы в рудах и продуктах из переработки | 1982 |
|
SU1083107A1 |
| US 4212121 A1, 15.07.1980 | |||

