Изобретение относится к области физического моделирования пространственных многостепенных подвижных сложных технических систем, в частности пространственной системы подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации, самоадаптируемых пространственных узлов стыковки и мягкой посадки космических и других технических объектов, а также пространственных механизмов перемещения рабочих органов металлорежущих станков и контрольно-измерительных машин с параллельной кинематикой.
Известны "Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство для его осуществления" (патент РФ 2161109, МПК В 64 С 1/00, 1/22, 3/00, 1999 г. ), которые реализуются за счет активной виброизолирующей подвески, выполненной в виде манипулятора, включающего не менее шести единичных модулей с линейными приводами одинакового конструктивного исполнения и сферическими (или эквивалентными им) опорами на концах, шарнирно связывающих между собой основание (жесткие точки крепления на космическом аппарате) и жесткую платформу с установленной на ней упругой конструкцией космической трансформируемой антенны с образованием при выключенных линейных приводах пространственной фермы. При этом согласованным изменением (с помощью линейных приводов) длин единичных модулей осуществляют один из следующих режимов управления динамикой конструкции антенны или их комбинации:
- виброизоляция космического аппарата при раскрытии конструкции антенны;
- подавление колебаний конструкции антенны, вызванных раскрытием антенны и внешними факторами;
- виброизоляция конструкции антенны от микродинамических воздействий, вызванных работой систем космического аппарата в процессе эксплуатации;
- юстировка и наведение оси антенны (главного лепестка диаграммы направленности) на исследуемый объект.
Для успешной реализации приведенного технического решения необходимо провести его испытания на функционирование, что требует изготовление полномасштабной (с целью исключения влияния масштабного фактора) физической модели. Для этого необходимо выполнение следующих работ:
1. Разработка конструкторской документации (КД) на физическую модель.
2. Изготовление физической модели.
3. Корректировка ТСД по результатам изготовления физической модели.
4. Проведение приемосдаточных испытаний (ПСИ) физической модели.
5. Корректировка КД по результатам ПСИ.
6. Проведение лабораторно-отработочных испытаний (ЛОИ) на функционирование физический модели с целью проверки правильности выбранных конструкторско-технологических решений разработки.
7. Корректировка КД по результатам ЛОИ.
8. Проведение исследований физической модели с целью отработки алгоритмов и программ и верификации математической модели системы управления изделием.
Представленный далеко неполный перечень работ по созданию полномасштабной физической модели устройства подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации показывает, что для их выполнения, учитывая высокую категории") сложности изделия, требуется затратить значительные временные и финансовые ресурсы, что не всегда представляется возможным. Так, например, на создание сложной технической системы, включающей пространственные механизмы, управляемые от ЭВМ, затрачивается с момента разработки технического задания до ее ввода в эксплуатацию от 5 до 7 лет. Изготовление же физических моделей таких систем в уменьшенном масштабе неизбежно приводит к негативным последствиям масштабного эффекта, когда полученные результаты испытаний уменьшенной физической модели не коррелируют с реальным изделием. D результате - потери временных и финансовых ресурсов. Следует также отметить, что приведенное техническое решение является новым и его физическая модель до настоящего времени не создавалась.
Известна также физическая модель единичного независимого шарнирно-рычажного механизма (виброизолятора). Шесть таких независимых механизмов, шарнирно связывающих основание с платформой с образованием при выключенных приводах геометрически неизменяемой системы, при согласованной работе способны обеспечить пространственную активную виброизоляцию полезной нагрузки, установленной на платформе относительно вибрирующего основания (патент РФ 2091630, МПК F 16 F 15/06. Способ виброизоляции и виброизолятор. Синев А.В., Рыбак Л. А. и др., опубл. 27.09.1997 г., Бюл. 27). Физическое моделирование данной пространственной системы активной виброизоляции осуществлялось на уменьшенном в масштабе макете одномерной активной системы виброизоляции кинематического принципа действия, описанном в гл. 8 монографии: Л.А. Рыбак, А.В. Синев, А.И. Пашков. Синтез активных систем виброизоляции на космических объектах. - М.: Янус - К, 1997 (с.139-157). В целях упрощения реализации данной физической модели она представлялась эквивалентным стержнем, способным управляемо изменять свою длину I0. На рис.6.4 (там же, с.99) представлено схемно-техническое решение описанной выше физической модели одномерной активной системы виброизоляции кинематического принципа действия, из которого видно, что эквивалентный стержень переменной длины создается качательными движениями рычагов параллелограммного механизма за счет изменения длины между центрами шарниров Гука А и В.
Указанная физическая модель имеет следующие недостатки:
1. Так как приведенная физическая модель является одномерной и выполнена в уменьшенном масштабе, то при использовании результатов ее исследований в пространственной системе активной виброизоляции и наведения, например, по патенту РФ 2161109, МПК B 64 G 1/00, 1/22, 3/00, 1999 г., "Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство для его осуществления", крайне сложно учесть взаимное влияние одномерных активных систем виброизоляции друг на друга в процессе эксплуатации, что снижает точность и, следовательно, ценность физического моделирования.
2. Данная физическая модель выполнена в виде пантографа, в связи с чем при выключении привода она не способна образовать жесткий стержень и соответственно в пространственной системе активной виброизоляции - пространственную ферму, что также неизбежно приведет к снижению точности физического моделирования и ценности результатов экспериментальных исследований.
3. Низкая точность моделирования на приведенной выше физической модели не позволит корректно использовать результаты ее экспериментальных исследований для верификации математической модели пространственной системы активной виброизоляции и наведения. В результате снижается точность и соответственно эффективность математического моделирования пространственной системы активной виброизоляции и наведения, что, в свою очередь, неизбежно приведет к увеличению финансовых и временных затрат на создание опытного образца штатной системы.
В то же время проведенный анализ показал, что известные в настоящее время авиационные тренажеры с шестистепенной системой подвижности, управляемой от ЭВМ, например, выпускаемый отечественной промышленностью (ПКБМ г.Пенза и ВНИИ "Сигнал" г.Ковров) шестистепенной динамический стенд типа КТС ТУ-204 (см. описание изобретения "Динамический многостепенной стенд" к патенту РФ 2129305, МПК G 09 B 9/08, F 15 B 9/17, 1996 г. - прототип), могут идеально подойти в качестве полномасштабных геометрических и кинематических аналогов приведенной выше системы подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации, т. е. могут быть применены в качестве ее полномасштабной физической модели.
Однако следует отметить, что шестистепенные авиационные тренажеры предназначены не для моделирования систем активной виброизоляции с одновременным их наведением в пространстве, а для имитации акселерационных воздействий на летчика и сам летательный аппарат.
Так, например, известно, что авиационные тренажеры предназначены для воспроизведения условий, в которых находится экипаж во время полета, в частности для имитации акселерационных воздействий (перегрузок) (В.А. Боднер и др. Авиационные тренажеры / В.А. Боднер, P.A. Закиров, И.И. Смирнова. - М. : Машиностроение, 1978. С.5).
Известен также комплексный тренажер самолета (КТС) с шестистепенной системой подвижности кабины (динамический стенд), предназначенный для имитации акселерационных воздействий на летчика на частотах от низких до средних в зависимости от амплитудных ограничений (Красовский А.А. Основы теории авиационных тренажеров. - М.: Машиностроение, 1995. С.232-244). Шестистепенной КТС содержит шесть гидроцилиндров с максимальным ходом 1,5,...2 м. Каждый гидроцилиндр снабжен датчиком позиционной обратной связи, обеспечивающим позиционирование. Опоры шарового шарнирного типа каждой из трех пар гидроцилиндров на полу помещения (железобетонном основании) совмещены или расположены близко друг к другу. Такие же опоры на полу кабины образуют треугольник. Каждая пара рабочих гидроцилиндров образует две стороны треугольника. При согласованном изменении длины этих сторон, т.е. при перемещении штоков гидроцилиндров, изменяется положение кабины (там же, с.233 и рис.8.9).
Таким образом, применение известных в настоящее время авиационных тренажеров с шестистепенной системой подвижности, управляемых от ЭВМ, в качестве полномасштабной физической модели устройства подавления помех от колебаний упругой конструкции космической антенны в процессе эксплуатации позволит определить законы движения (управления) платформы, при которых система подвижности будет не генерировать акселерационные воздействия на объект, установленный на платформе, а наоборот, с помощью управляемого от ЭВМ согласованного изменения длин линейных приводов системы подвижности будет осуществлять парирование акселерационных воздействий, направленных от источника возмущений к защищаемому объекту (конструкции космической антенны) с возможностью его наведения в пространстве.
Изобретение направлено на снижение временных и финансовых затрат, необходимых для создания физической модели и проведения ее исследований, проведение корректной верификации математической модели пространственной системы активной виброизоляции и поведения и, как следствие, повышение точности физического и математического моделирования, что позволит снизить финансовые и временные затраты на создание опытного образца штатной системы, а также повысить коэффициент использования в авиационной промышленности шестистепенных динамических стендов типа KTC ТУ-204.
Это достигается тем, что в физической модели пространственной системы активной виброизоляции и наведения, содержащей активную виброизолирующую шестистепенную систему подвижности с основанием и платформой, шарнирно связанными между собой линейными приводами, управляемыми от ЭВМ, и источник вибровозмущений, активная виброизолирующая шестистепенная система подвижности выполнена в виде эксплуатируемого в авиационной промышленности динамического шестистепенного стенда комплексного тренажера самолета, при этом источник вибровозмущений установлен на платформе через датчики силы с возможностью поворота по азимуту и углу места.
Важными обстоятельствами в пользу эффективности исполнения активной шестистепенной системы подвижности физической модели пространственной системы активной виброизоляции и наведения в виде эксплуатируемого в авиационной промышленности динамического шестистепенного стенда комплексного тренажера самолета являются:
1. В настоящее время практически все отечественные авиационные объединения, занимающиеся созданием самолетов и вертолетов, оснащены динамическими многостепенными стендами, в том числе выпускаемыми отечественной промышленностью (ПКБМ г. Пенза и ВНИИ "Сигнал" г.Ковров) шестистепенными динамическими стендами типа KTC ТУ-204 (см. описание изобретения "Динамический многостепенной стенд" к патенту РФ 2129305, МПК G 09 B 9/08, F 15 B 9/17, 1996 г. ), предназначенными для имитации акселерационных эффектов. Проведенный анализ показал, что данный шестистепенной динамический стенд типа KTC ТУ-204 практически идеально подходит в качестве физической модели пространственной системы активной виброизоляции и наведения устройства подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации по указанному выше патенту РФ 2161109, МПК B 64 G 1/00, 1/22, 3/00, 1999 г., т.к. является не только кинематическим, но и геометрическим полномасштабным аналогом (габаритные размеры стенда и его элементов практически совпадают с размерами переходной фермы, связывающей космический аппарат с конструкцией трансформируемой антенны космического радиотелескопа и выполненной в виде пространственной системы активной виброизоляции и наведения).
2. Из-за наблюдаемого в последние годы спада производства коэффициент использования в авиационной промышленности динамических шестистепенных стендов типа КТС ТУ-204 крайне низкий. Применение данных стендов по новому назначению, включая и применение в качестве физических моделей других объектив техники, например пространственных механизмов перемещения рабочих органов металлорежущих станков и контрольно-измерительных машин с параллельной кинематикой, имеющих в настоящее время приоритетное направление в развитии (Концепция развития иновационного станкостроения // Приводная техника, 6, 2000, с.12-17 и Белянин П.Н. Об основных направлениях совершенствования конструкций металлорежущих станков // Проблемы машиностроения и надежности машин, 6, 2000, с.3-14), позволит повысить коэффициент их использования, причем названные выше механизмы также имеют совпадающую кинематику и геометрические размеры с вышеназванным стендом. При этом следует также отметить важность моделирования работы механизмов с параллельной кинематикой в зонах особых положений, в которых они теряют управляемость.
На чертеже представлено схематичное изображение динамического шестистепенного стенда, используемого в качестве активной виброизолирующей шестистепенной системы подвижности полномасштабной физической модели пространственной системы активной виброизоляции и наведения устройства подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации.
Динамический многостепенной стенд 1, например, выпускаемый отечественной промышленностью (ПКБМ г. Пенза и ВНИИ "Сигнал" г. Ковров) шестистепенной динамический стенд типа КТС ТУ-204 (см. описание изобретения "Динамический многостепенной стенд" к патенту РФ 2129305, МПК G 09 B 9/08, F 15 B 9/17, 1996 г. ), применяемый в качестве активной виброизолирующей шестистепенной системы подвижности полномасштабной физической модели пространственной системы активной виброизоляции и наведения, например, по патенту РФ 2161109, МПК B 64 G 1/00, 1/22, 3/00, 1999 г., "Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство для его осуществления", представляет собой шестистепенную систему подвижности, выполненную в виде жесткой платформы 2 (чертеж) с полезной нагрузкой (условно не показана), представляющей 1 - координатный манипулятор (Колискор А.Ш. Разработка и исследование промышленных роботов на основе 1-координат // Станки и инструмент, 1982. 12. С.21-24) и управляемой относительно жесткого неподвижного основания 3 шестью гидроцилиндрами 4, гидравлически связанными с гидронасосной станцией и электрогигдрооборудованием (условно не показаны), электрически связанных с управляющей ЭВМ (условно не показана). При этом платформа 2 и неподвижное основание 3 связаны между собой замкнутой кинематической цепью, каждое из соединительных звеньев которой содержит линейный привод в виде гидроцилиндра 4 и две сферические кинематические пары 5 с ограничением от вращения соединительного звена относительно его продольной оси или эквивалентные им комбинации кинематических пар, обеспечивающих необходимое число степеней свободы. Каждый силовой гидроцилиндр 4 имеет устройство для измерения длины его выдвижения (датчики относительных, перемещения, скорости и ускорения) и в комплекте с ним, гидроусилителем и электрической схемой управления образует следящую систему, управляемую внешним задающим сигналом, поступающим от управляющей ЭВМ динамического многостепенного стенда 1 и обеспечивающим разложение управляющих сигналов по координатам, соответствующим каждому силовому гидроцилиндру 4. Согласованная работа шести приводов шестистепенной системы подвижности позволяет обеспечить шесть степеней свободы платформы 2 относительно неподвижного основания 3 и соответствующие акселерационные воздействия на полезную нагрузку, устанавливаемую на платформу 2.
Физическая модель пространственной системы активной виброизоляции и наведения реализована следующим образом.
К точкам на платформе 2 динамического многостепенного стенда 1, совпадающими с точками крепления штатной полезной нагрузки, например, конструкции космической трансформируемой антенны, требующей низкочастотной виброзащиты, через датчики силы 6 устанавливается с возможностью поворота относительно платформы 2 по азимуту и углу места, например, с помощью станочного приспособления фрезерного станка (условно не показано), источник низкочастотных вибровозмущений 7 (от 0 до 10 Гц в зависимости от амплитуды), при этом платформа 2 расположена симметрично относительно вертикальной оси. Датчики силы, источник низкочастотных вибровозмущений и приеморегистрирующая аппаратура с компьютерной обработкой данных (условно не показаны) могут быть как зарубежной, так и отечественной комплектации. После определения критических значений низкочастотных амлитудно-частотных характеристик штатных источников вибровозмущений и направлений их воздействия на полезную нагрузку в пространстве, при которых требуется обеспечение виброзащиты, включается источник низкочастотных вибровозмущений 7 на одном из выбранных критических режимов, установленный в пространстве с помощью станочного приспособления относительно платформы 2 таким образом, чтобы направление действия вибровозмущений соответствовало для данного режима, при этом датчики силы 6 показывают значения передаваемых на платформу вибровозмущений. Затем подбирается такой закон движения платформы 2 с источником низкочастотных вибровозмущений 7, при котором произойдет уменьшение передачи вибровозмущений от источника низкочастотных вибровозмущений 7 к платформе 2 до требуемых значений, фиксируемое датчиками силы 6. Более просто эта операция физического моделирования может быть реализована следующим образом. С помощью согласованной работы гидроцилиндров 4 организуется колебательное движение платформы 2 относительно основания 3 с амплитудно-частотными характеристиками, соответствующими данному критическому режиму. Затем включается низкочастотный источник вибровозмущений 7 и осуществляется управляемое изменение его фазы до тех пор пока датчики силы 6 не покажут уменьшение передачи вибровозмущений от источника низкочастотных вибровозмущений 7 к платформе 2 до требуемых значений. Полученное соотношение фаз колебаний платформы 2 и низкочастотного источника вибровозмущений 7 даст требуемый закон движения платформы 2 в режиме активной виброизоляции. Аналогично проводят операции физического моделирования пространственной системы виброизоляции и наведения для остальных критических режимов, соответственно меняя при этом как амплитудно-частотные характеристики режимов, так и соответствующие им направления действия вибровозмущений в пространстве. При физическом моделировании режима, когда требуется обеспечить активную виброизоляцию в меняющихся во времени критических режимах с одновременным наведением или угловой стабилизацией оси симметрии платформы 2 в пространстве, движение платформы 2 в режимах активной виброизоляции осуществляется относительно основания 3 таким образом, чтобы при колебаниях платформы 2 обеспечивалась бы наведение или угловая стабилизация ее оси симметрии в пространстве.
Следует отметить, что источник вибровозмущений имитирует динамические воздействия на космический аппарат (КА), возникающие при раскрытии конструкции космической антенны и на саму конструкцию космической антенны от работающих систем КА в процессе ее эксплуатации, при этом изменение направления динамических воздействий обеспечивается устройством пространственной ориентации источника вибровозмущений относительно платформы по азимуту и углу места в процессе проведения экспериментальных исследований физической модели, а датчики силы показывают уровень виброзащиты от указанных динамических воздействий за счет парируемых движений шестистепенной системы подвижности.
Полученные результаты физического моделирования могут быть использованы как для корректировки выбранных технических решений, так и для верификации математической модели устройства подавления помех от колебаний упругой конструкции космической антенны в процессе эксплуатации пространственной системы активной виброизоляции и наведения.
Предлагаемое использование динамического многостепенного стенда с управляющей ЭВМ в качестве полномасштабной активной шестистепенной подвески физической модели пространственной системы активной виброизоляции и наведения устройства подавления помех от колебаний упругой конструкции космической антенны в процессе эксплуатации позволит не только существенно сократить временные и финансовые ресурсы, необходимые на ее создание, и обеспечить получение качественных результатов за счет полномасштабности физической модели, но и повысить коэффициент использования динамических многостепенных стендов, эксплуатируемых в настоящее время в авиационной промышленности (в качестве авиационных тренажеров и испытательных стендов) с низкими значениями коэффициента использования.
Предлагаемое техническое решение может быть также использовано при полномасштабном физическом моделировании пространственных механизмов перемещения рабочих органов металлорежущих станков и контрольно-измерительных машин с параллельной кинематикой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2323136C2 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
Изобретение относится к области физического моделирования пространственных многостепенных подвижных технических систем. Модель содержит активную виброизолирующую шестистепенную систему подвижности с основанием и платформой, шарнирно связанными между собой линейными приводами, управляемыми от ЭВМ. Имеется также источник вибровозмущений. Отличие модели от известных заключается в том, что активная виброизолирующая шестистепенная система подвижности выполнена в виде эксплуатируемого в авиационной промышленности динамического шестистепенного стенда комплексного тренажера самолета. При этом источник вибровозмущений установлен на платформе стенда через датчики силы с возможностью поворота по азимуту и углу места. Изобретение направлено на снижение временных и финансовых затрат, необходимых для создания физической модели и ее исследований с корректной верификацией и повышенной точностью моделирования. 1 ил.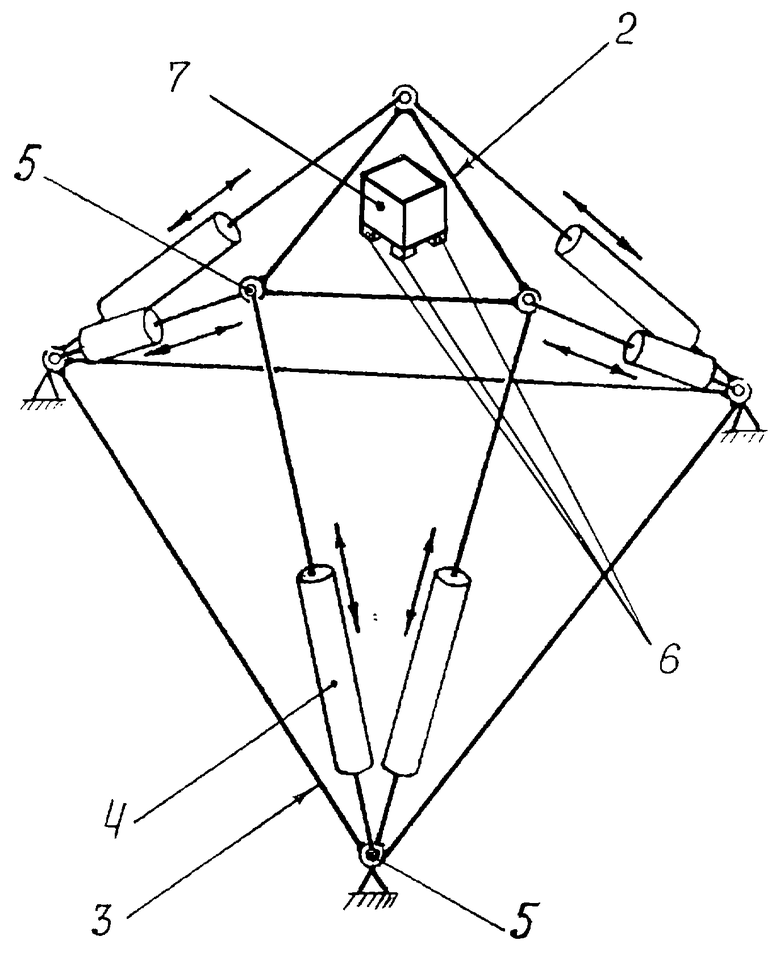
Физическая модель пространственной системы активной виброизоляции и наведения, содержащая активную виброизолирующую шестистепенную систему подвижности с основанием и платформой, шарнирно связанными между собой линейными приводами, управляемыми от ЭВМ, и источник вибровозмущений, отличающаяся тем, что активная виброизолирующая шестистепенная система подвижности выполнена в виде эксплуатируемого в авиационной промышленности динамического шестистепенного стенда комплексного тренажера самолета, при этом источник вибровозмущений установлен на платформе стенда через датчики силы с возможностью поворота по азимуту и углу места.
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛЯТОР | 1995 |
|
RU2091630C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| Виброизолированная площадка | 1979 |
|
SU783517A1 |

