Изобретение относится к автоматике и электронной технике и может использоваться для расчета регуляторов, применяемых в цифровых и аналоговых системах с обратной связью для управления различными физическими величинами (температурой, давлением, скоростью и т.д.) в условиях внешних возмущений, применяемых в различных отраслях промышленности и в научных исследованиях.
Точное управление динамическими объектами актуально во многих отраслях промышленности, техники, технологии и науки. Эти задачи решаются с помощью систем с обратной связью, в которых осуществляются изменения входных управляющих сигналов, поступающих на объект для обеспечения требуемого значения выходных сигналов объекта. Здесь выходным сигналом может быть любая физическая величина. Такие системы с обратной связью успешно работают только при правильно спроектированном регуляторе. Для проектирования регулятора требуется знать математическую модель объекта, которая, как правило, определяется экспериментально. Проектирование системы состоит в выборе регулятора, то есть набора элементарных звеньев и соединения между ними, и в расчете его коэффициентов, то есть усиления отдельных элементов этой структуры. Коэффициенты регулятора могут быть рассчитаны методом численной оптимизации. С этой целью используется структура модели для оптимизации системы, то есть набор элементарных звеньев, соединенных определенным образом (далее - «структура модели»). Эта структура модели, как правило, содержит а) имитатор объекта; б) регулятор; в) анализатор сигналов; г) оптимизатор регулятора. Путем использования такой структуры модели в итоге рассчитываются коэффициенты регулятора. Далее регулятор с рассчитанными коэффициентами используют для создания системы с обратной связью, для чего в структуре модели модель объекта заменяют объектом, а анализатор сигналов и оптимизатор коэффициентов регулятора могут быть при этом отключены.
Известна структура модели для оптимизации системы с обратной связью, содержащая: регулятор, имитатор объекта, измеритель выходного сигнала объекта, генератор ступенчатого сигнала, анализатор сигналов, оптимизатор регулятора и средство индикации результата, причем регулятор одним входом соединен с выходом генератора ступенчатого сигнала, а другим входом соединен с выходом объекта через измеритель выходного сигнала объекта; оптимизатор регулятора своим входом соединен со вторым выходом регулятора через анализатор сигналов, а своими выходами соединен с входами регулятора, предназначенными для управления коэффициентами регулятора; средство индикации своими входами соединено с выходами анализатора сигналов, выходом объекта и выходом измерителя выходного сигнала объекта [В. Дьяконов. VisSim+Mathcad+MATLAB. Визуальное математическое моделирование. М. Солон-Пресс.2004. с.253. Рис.5.35].
Данная структура модели для оптимизации системы с обратной связью работает следующим образом.
Оптимизатор регулятора осуществляет управление режимами работы всей структуры модели, а именно: а) вводит начальные значения коэффициентов в регулятор; б) инициирует многократный запуск работы этой структуры модели с одинаковыми начальными условиями, кроме значений коэффициентов регулятора; в) по сигналу с выхода анализатора сигналов вычисляет новые значения коэффициентов регулятора и принимает решение либо о повторении работы всей структуры модели с новыми коэффициентами или о прекращении работы этой структуры модели.
При этом анализатор сигналов вычисляет значение стоимостной функции как результат обработки сигналов от регулятора. Оптимизатор регулятора на основе значений стоимостной функции вычисляет и задает новые значения коэффициентов регулятора, формируя их по заданному алгоритму и вписывая их в регулятор через соответствующие его входы. Регулятор совместно с имитатором объекта и измерителем выходного сигнала объекта имитирует действие системы с обратной связью. Генератор ступенчатого сигнала имитирует изменение задающего воздействия V в системе. Если увеличение какого-либо коэффициента приводит к уменьшению стоимостной функции, то оптимизатор регулятора продолжает его увеличивать на следующем шаге. Если же увеличение этого коэффициента приводит к увеличению стоимостной функции, оптимизатор регулятора уменьшает этот коэффициент. Если изменение данного коэффициента в любую сторону приводит лишь к увеличению стоимостной функции, то оптимизатор регулятора приступает к изменению другого коэффициента. Таким путем оптимизатор регулятора продолжает свои действия в цикле до тех пор, пока не будет выполнено заданное число итераций или пока увеличения каждого из параметров не будет приводить лишь к увеличению стоимостной функции. Средство индикации результата отображает найденные значения коэффициентов регулятора и получаемые переходные процессы в этой структуре модели для оптимизации и системы с обратной связью. На этом действие данной структуры модели для оптимизации системы с обратной связью успешно завершается. В итоге оптимизации получаются найденными все коэффициенты регулятора. На этом действие данной структуры модели для оптимизации системы с обратной связью успешно завершается.
Недостаток такой структуры модели для оптимизации системы с обратной связью состоит недостаточной эффективности, поскольку при использовании полученного регулятора при недостаточно точной имитации действий объекта имитатором объекта получаемый регулятор может оказаться неэффективным. Это проявляется в том, что отклик системы с обратной связью, которая оптимизируется с помощью рассмотренной структуры модели, на ступенчатое изменение входного сигнала V не достигает предписанного значения, или достигает его после чрезмерно большого перерегулирования. Как правило, недостаточно точная имитация действий объекта имитатором объекта наблюдается в высокочастотной области частотной характеристики имитатора объекта. Это происходит потому, что имитатор использует результаты идентификации объекта без регулятора, когда высокочастотные компоненты отклика объекта соизмеримы с погрешностью средств его измерения. В этом случае регулятор, получаемый в результате действия структуры модели, непригоден к использованию, следовательно, такая структура модели для оптимизации системы с обратной связью недостаточно эффективна.
Известна другая структура модели для оптимизации системы с обратной связью, принятая за прототип, содержащая имитатор объекта, регулятор, вычитатель, анализатор достижения цели управления, анализатор энергетических затрат и оптимизатор регулятора, в которой положительный вход вычитателя является входом структуры модели, его отрицательный вход соединен с выходом имитатора объекта, его выход соединен с входом регулятора и входом оптимизатора регулятора, выход оптимизатора регулятора подключен к входу регулятора, при этом выход регулятора соединен с входом имитатора объекта и через анализатор энергетических затрат с входом оптимизатора регулятора [Жмудь В.А., Касторный А.В. Концепция энергосберегающих регуляторов. Автоматика и программная инженерия. 2013. №4 (6). Стр.16, рис.2. URL: http://ait.cs.nstu.ru/sites/default/files/AIPI-4-2013.pdf].
Эта структура модели для оптимизации системы с обратной связью работает следующим образом.
Вся структура модели в целом многократно имитирует работу системы при заданном входном сигнале V, как правило, входной сигнал V задается в виде ступенчатого приращения из нулевого значения в единичное. Этот сигнал подается на структуру модели от внешнего устройства или генерируется программно. В исходном состоянии в регулятор из оптимизатора регулятора вписаны стартовые значения коэффициентов регулятора, от которых начинается процесс оптимизации. Эти стартовые значения задаются оператором пред началом работы или генерируются оптимизатором регулятора автоматически. Регулятор совместно с имитатором объекта и вычитателем образуют замкнутый контур управления, в котором происходит автоматическая подстройка выходного сигнала к входному сигналу. При этом на входе и на выходе регулятора формируются сигналы, содержащие информацию о качестве работы этой системы. Эти сигналы анализируются двумя анализаторами, а именно: сигнал на входе регулятора является ошибкой управления, он поступает на вход анализатора достижения цели управления, который вычисляет сигнал, характеризующий точность действия регулятора, например, интеграл от модуля этой ошибки. Сигнал на выходе регулятора анализируется анализатором энергетических затрат, который вычисляет интеграл от квадрата этого сигнала. Оптимизатор регулятора вычисляет стоимостную функцию, которая является суммой поступающих на его входы сигналов. На основании получаемых значений этой суммы оптимизатор регулятора вычисляет новые значения коэффициентов регулятора и принимает решение либо о повторении работы всей структуры модели с новыми коэффициентами или о прекращении работы этой структуры модели. При этом оптимизатор регулятора новые значения коэффициентов регулятора формирует по заданному алгоритму и вписывает их в регулятор через соответствующие его входы. Регулятор совместно с имитатором объекта и вычитателем имитирует действие системы с обратной связью. Если увеличение какого-либо коэффициента приводит к уменьшению стоимостной функции, то оптимизатор регулятора продолжает его увеличивать на следующем шаге. Если же увеличение этого коэффициента приводит к увеличению стоимостной функции, оптимизатор регулятора уменьшает этот коэффициент. Если изменение данного коэффициента в любую сторону приводит лишь к увеличению стоимостной функции, то оптимизатор приступает к изменению другого коэффициента. Таким путем оптимизатор регулятора продолжает свои действия в цикле до тех пор, пока не будет выполнено заданное число итераций или пока увеличения каждого из параметров не будет приводить лишь к увеличению стоимостной функции. В итоге оптимизации получаются найденными все, коэффициенты регулятора. На этом действие данной структуры модели для оптимизации системы с обратной связью успешно завершается.
Недостаток такой системы состоит в потере устойчивости при недостаточно точно измеренной высокочастотной части модели объекта. Недостаточно точно определенная высокочастотная часть модели объекта может приводить к потере устойчивости системы, для которой регулятор рассчитан методом оптимизации с использованием рассмотренной структуры модели для оптимизации системы с обратной связью.
Предлагаемое изобретение решает задачу сохранения устойчивости при недостаточно точно измеренной высокочастотной части модели объекта.
Поставленная задача решается тем, что в структуру модели для оптимизации системы с обратной связью, содержащую модель объекта, регулятор, вычитатель, анализатор достижения цели управления и оптимизатор регулятора, в которой положительный вход вычитателя является входом структуры, его отрицательный вход соединен с выходом модели объекта, его выход соединен с входом регулятора и входом анализатора достижения цели управления, выход которого соединен с входом оптимизатора, выход оптимизатора подключен к входу регулятора, введен элемент с ограниченным быстродействием, включенный между выходом регулятора и входом модели объекта.
При этом элемент с ограниченным быстродействием может быть выполнен как элемент запаздывания.
Также элемент с ограниченным быстродействием может быть выполнен как устройство выборки-хранения с генератором импульсов, подключенным к тактовому входу этого устройства выборки-хранения.
Предлагаемая структура модели для оптимизации системы с обратной связью приведена на Фиг.1.
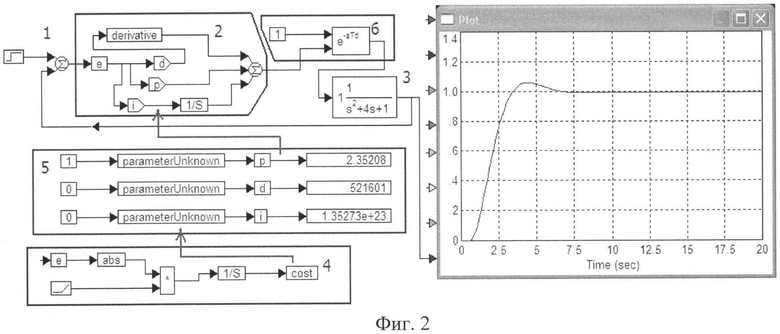
На Фиг.2 показана схема моделирования в программе VisSim предлагаемой структуры. Структура модели для оптимизации системы с обратной связью (Фиг.1) содержит:
1 - вычитатель,
2 - регулятор,
3 - имитатор объекта,
4 - анализатор достижения цели управления,
5 - оптимизатор регулятора,
6 - элемент с ограниченным быстродействием.
При этом положительный вход вычитателя 1 является входом структуры модели, его отрицательный вход соединен с выходом имитатора объекта 3, его выход соединен с входом регулятора 2 и входом оптимизатора регулятора 4, выход которого подключен к выходу регулятора 5, отличающаяся тем, что в нее введен элемент с ограниченным быстродействием, включенный между выходом регулятора 2 и входом имитатора объекта 3.
Все элементы структуры модели для оптимизации системы с обратной связью могут быть реализованы на программно-аппаратном цифровом контроллере. Также все элементы этой структуры модели для оптимизации системы с обратной связью могут быть реализованы на персональном компьютере программно, например, с помощью соответствующих блоков в программе VisSim.
Предлагаемая структура модели для оптимизации системы с обратной связью работает следующим образом.
Вся структура модели в целом многократно имитирует работу системы при заданном входном сигнале V, например, входной сигнал V задается в виде ступенчатого приращения из нулевого значения в единичное значение. Этот сигнал V подается на структуру модели от внешнего устройства или генерируется программно. В исходном состоянии в регулятор 2 из оптимизатора регулятора 5 вписаны стартовые значения коэффициентов регулятора 2, от которых начинается процесс оптимизации. Эти стартовые значения задаются оператором пред началом работы или генерируются оптимизатором регулятора 5 автоматически. Регулятор 2 совместно с имитатором объекта 3, элементом с ограниченным быстродействием 6 и вычитателем 1 образуют замкнутый контур управления, в котором происходит автоматическая подстройка выходного сигнала Y к входному сигналу V. При этом на выходе вычитателя 1 формируется сигнал Е, содержащий информацию о качестве работы этой системы. Этот сигнал поступает на вход анализатора достижения цели управления 4, который вычисляет сигнал, характеризующий точность действия регулятора 2, например, интеграл от модуля этой ошибки. Этот результат представляет собой стоимостную функцию. Он поступает на вход оптимизатора регулятора 5. На основании получаемых значений этой стоимостной функции оптимизатор регулятора 5 вычисляет новые значения коэффициентов регулятора 2 и принимает решение либо о повторении работы всей структуры модели с новыми коэффициентами или о прекращении работы этой структуры модели. При этом оптимизатор регулятора 5 новые значения коэффициентов регулятора 2 формирует по заданному алгоритму и вписывает их в регулятор 2 через соответствующие его входы. Регулятор 2 совместно с имитатором объекта 3, элементом с ограниченным быстродействием 6 и вычитателем 1 имитирует действие системы с обратной связью. Если увеличение какого-либо коэффициента приводит к уменьшению стоимостной функции, то оптимизатор регулятора 5 продолжает его увеличивать на следующем шаге. Если же увеличение этого коэффициента приводит к увеличению стоимостной функции, оптимизатор регулятора 5 уменьшает этот коэффициент. Если изменение данного коэффициента в любую сторону приводит лишь к увеличению стоимостной функции, то оптимизатор регулятора 5 приступает к изменению другого коэффициента. Таким путем оптимизатор регулятора 5 продолжает свои действия в цикле до тех пор, пока не будет выполнено заданное число итераций или пока увеличения каждого из параметров не будет приводить лишь к увеличению стоимостной функции. В итоге оптимизации получаются найденными все коэффициенты регулятора 2. На этом действие данной структуры модели для оптимизации системы с обратной связью успешно завершается.
Положительный эффект от предлагаемой структуры модели для оптимизации системы с обратной связью состоит в том, что если даже имитатор 3 недостаточно точно имитирует объект в области высоких частот, то предлагаемая структура модели все же обладает достаточной эффективностью. Это достигается тем, что при оптимизации регулятора с использованием предлагаемой структурой сигнал, формируемый имитатором регулятора дополнительно подвергается процессу обработки, который искусственно ухудшает высокочастотные свойства имитируемого объекта вследствие того, что элемент с ограниченным быстродействием 6 включен последовательно с имитатором объекта 3. Поскольку в структуру модели дополнительно введен этот элемент с ограниченным быстродействием 6, совместно имитатор объекта 3 и элемент с ограниченным быстродействием 6 могут быть рассмотрены как новый составной имитатор объекта, частотные свойства которого заведомо хуже, чем частотные свойства только имитатора объекта 3. Поэтому результатом действия этой структуры модели являются такие найденные коэффициенты регулятора 3, которые обеспечивают эффективную работу регулятора даже при наихудшем из возможного быстродействии имитатора объекта. Рассчитанный таким образом регулятор 3 эффективен, поскольку рассчитан для самого худшего случая. Поэтому при использовании полученных коэффициентов в регуляторе совместно устойчивость не нарушается и перерегулирование не превышает допустимых величин.
Таким образом, результат действия структуры модели для оптимизации системы с обратной связью достигает своей цели: при использовании получаемого регулятора с реальным объектом образуется устойчивая система.
Следовательно, предлагаемая структура модели для оптимизации системы с обратной связью достаточно эффективна.
Для иллюстрации рассмотрим передаточную функцию имитатора объекта в виде
Здесь s - аргумент преобразования Лапласа, передаточная функция описывает отношение выходного сигнала к входному сигналу в области преобразования Лапласа.
Предположим, что эта имитатор объекта 3, действующий по уравнению (1), недостаточно точно имитирует действие объекта в отношении высокочастотной части его отклика на входные воздействия, например, в объекте может присутствовать апериодическое звено или звено запаздывания с небольшой по величине постоянной времени, например, от 0 до 0,5 с, которые имитатором объекта не имитируются.
В качестве анализатора достижения цели управления может быть использован вычислитель целевой функции, например, содержащий выпрямитель, умножитель, интегратор и формирователь линейно нарастающей функции. При этом, например, входы умножителя соединены с выходами выпрямителя и формирователя линейно нарастающей функции, выход умножителя соединен с входом интегратора, входом анализатора достижения цели управления является вход выпрямителя, а его выходом является выход интегратора. В таком случае этот анализатор достижения цели управления будет вычислять целевую (стоимостную) функцию, равную интегралу от модуля ошибки Е, умноженного на время с начала переходного процесса.
В этом случае при использовании структуры модели по прототипу в результате оптимизации получим регулятор с коэффициентами пропорционального, интегрирующего и дифференцирующего каналов, соответственно: КП=2,32; КД=-0,91; КИ=0,84. Переходный процесс в такой структуре модели с таким регулятором не содержит перерегулирования. Если при использовании такой структуры модели неточность действия имитатора объекта состояла в том, что ошибочно не была осуществлена имитация содержащегося в объекте не выявленного апериодическое звена с величиной постоянной времени 0,5 с, то в такой системе с рассчитанным таким путем регулятором переходный процесс содержит перерегулирование, которое составляет около 25%, то есть система недостаточно устойчива. Если при этих же условиях неточность действия иситатора объекта состоит в том, что ошибочно не имитируется действие не выявленного элемента запаздывания с постоянной времени, равной 0,5 с, то переходный процесс содержит перерегулирование, которое составляет около 28%, то есть система и в этом случае недостаточно устойчива. Если же в объекте имеются оба этих неучтенных элемента, то перерегулирование составит 60%. Таким образом, прототип обладает отмеченным недостатком.
При использовании предлагаемой структуры модели для оптимизации системы с обратной связью, например, в качестве элемента с ограниченным быстродействием 6 может быть использован элемент запаздывания с постоянной времени, равной 1 с. Схема моделирования предлагаемой структуры модели для этого случая показана на Фиг.2. Здесь цифровые обозначения блоков соответствуют примененным выше, а связи между анализатором цели управления 4 и оптимизатором регулятора 5, а также между оптимизатором регулятора и регулятором осуществлены программно. Это отражено в наименованиях соответствующих величин. В частности блоки с названием «parameterUnknown» обязательно связаны с боком «cost», блоки с одинаковыми названиями «р», «d» и «i» также связаны между собой.
При использовании предлагаемой структуры модели в результате ее действия получаем регулятор 2 с коэффициентами пропорционального, интегрирующего и дифференцирующего каналов, соответственно: КП=2,4; КД=1,08; КИ=0,46. Переходный процесс в этой структуре модели при этих условиях имеет несущественное перерегулирование около 2%.
При этом если имитатор объекта недостаточно точно имитировал действия объекта, например, в нем не было учтено запаздывание с величиной постоянной времени 0,5 с или менее, и при этом также не было учтено апериодическое звено с постоянной времени 0,5 с или менее, то и в этом случае перерегулирование не превысит несущественную величину около 3%. Если недостаточно точное действие имитатора объекта состоит лишь в отсутствии в его действии влияния только запаздывания или только в отсутствии в его действии влияния апериодического звена, то перерегулирование будет менее 1%.
Таким образом, даже совместное действие двух факторов недостаточной точности имитатора объекта, таких, как апериодическое звено и элемент запаздывания, не приводит к существенному ухудшению эффективности действия структуры модели для оптимизации системы с обратной связью. Действие только одного из указанных факторов, или действие обоих этих факторов с меньшими значениями постоянных времени, либо отсутствие действия обоих этих факторов также не приводит к ухудшению эффективности действия предлагаемой структуры, поскольку и в этом случае перерегулирование не превышает допустимую малую величину.
Таким образом, предлагаемое изобретение решает задачу повышения эффективности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ДЛЯ ОБЪЕКТА С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2482533C2 |
| Система с обратной связью | 2021 |
|
RU2756229C1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2012 |
|
RU2522899C1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2015 |
|
RU2584925C1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2541684C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПО ИНТЕГРАЛУ КОМПЕНСИРУЮЩЕГО ВОЗДЕЙСТВИЯ | 2003 |
|
RU2285281C2 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
Изобретение относится к автоматике и электронной технике и может использоваться для расчета регуляторов, применяемых в цифровых и аналоговых системах с обратной связью для управления различными физическими величинами (температурой, давлением, скоростью и т.д.) в условиях внешних возмущений, применяемых в различных отраслях промышленности и в научных исследованиях. Структура модели для оптимизации системы с обратной связью, содержащая имитатор объекта, регулятор, вычитатель, анализатор достижения цели управления и оптимизатор регулятора, в которой положительный вход вычитателя является входом структуры, его отрицательный вход соединен с выходом имитатора объекта, его выход соединен с входом регулятора и входом оптимизатора регулятора, выход оптимизатора регулятора подключен к входу регулятора. Кроме того, в нее введен элемент с ограниченным быстродействием, включенный между выходом регулятора и входом модели объекта. При этом элемент с ограниченным быстродействием выполнен как элемент запаздывания или как устройство выборки-хранения с генератором импульсов, подключенным к тактовому входу этого устройства выборки-хранения. Технический результат заключается в сохранении устойчивости при недостаточно точно измеренной высокочастотной части модели объекта. 2 з.п. ф-лы, 2 ил.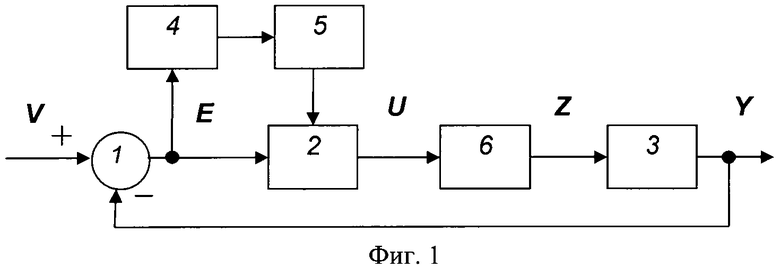
1. Структура модели для оптимизации системы с обратной связью, содержащая модель объекта, регулятор, вычитатель, анализатор достижения цели управления и оптимизатор регулятора, в которой положительный вход вычитателя является входом структуры, его отрицательный вход соединен с выходом модели объекта, его выход соединен с входом регулятора и входом анализатора достижения цели управления, выход которого соединен с входом оптимизатора, выход оптимизатора подключен к входу регулятора, отличающаяся тем, что в нее введен элемент с ограниченным быстродействием, включенный между выходом регулятора и входом имитатора объекта.
2. Структура модели для оптимизации системы с обратной связью по п.1, в которой элемент с ограниченным быстродействием выполнен как элемент запаздывания.
3. Структура модели для оптимизации системы с обратной связью по п.1, в которой элемент с ограниченным быстродействием выполнен как устройство выборки-хранения с генератором импульсов, подключенным к его тактовому входу.
| Власов К.П | |||
| Теория автоматического управления, Учебное | |||
| пособие | |||
| Харьков: Издательство Гуманитарный центр, 2007, стр | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
| US 6961626 B1, 01.11.2005 | |||
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |

