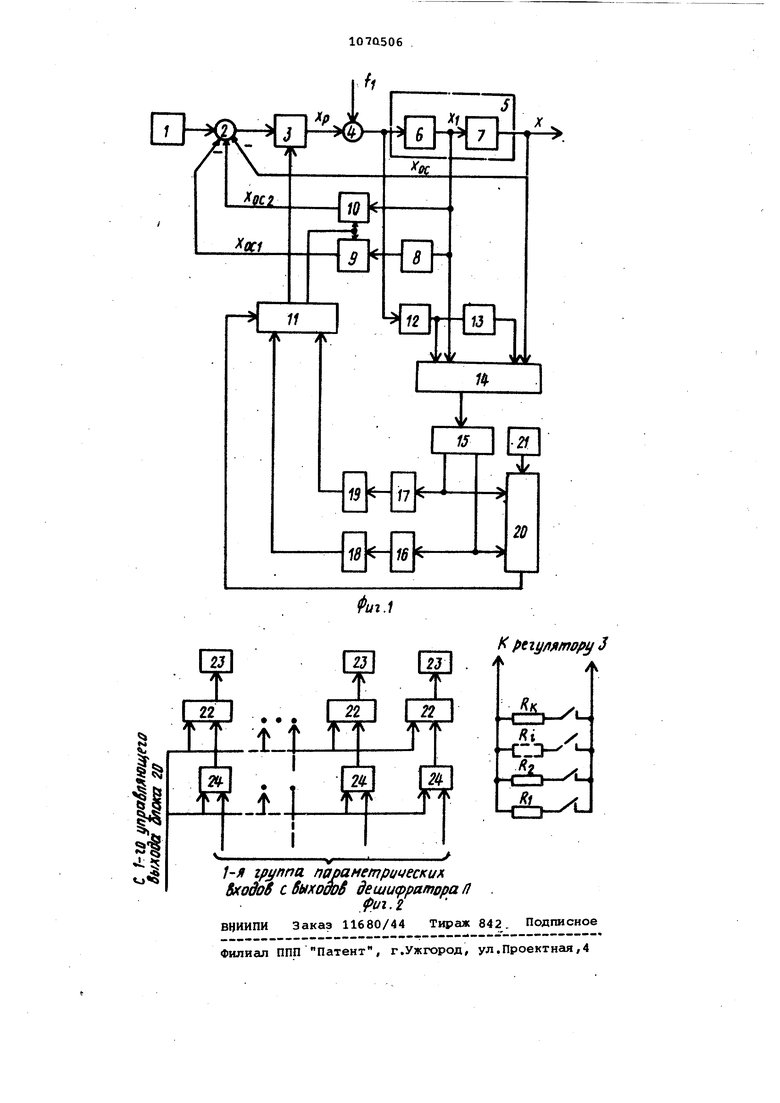
Изобретение относится к автоматике и может быть использовано для автоматизации теплоэнергетических процессов, электростанций, в частности, широко распространенных объе тов, имеюцих опережающий и инерционный участки регулирования с неизменякядимся или известным запаздываниями. Известна система управления для объектов с запаздыванием, в которую кроме основного крнтура регулирования для упреждения запаздывания вве ден второй контур, содержащий модел объекта управления без запаздывания и элемент запаздывания Cll. Работа таких систем основана на точном знании модели объекта без запаздывания и времени запаздывания Изменение параметров объекта во вре мени приводит в такой системе к уху шению качества регулирования или к неустойчивой работе системы. Известна также система управления, адаптивная к изменениям параметров объекта, содержащая последевательно.соединенные первую модель объекта, первый блок сравнения, блок подстройки, блок оптимизации, регулятор и сумматор, выход которог через объект управления соединен с вторьда входом первого блока сравнения и через элемент запаздывания с входом первой модели, выход котррой соединен с вторым входом блока оптимизации, а выход второго блока управления соединен с вторым входом регулятора и третьим входом блока . оптимизации, выход блока подстройки соединен с вторым входом первой модели объекта С21. Данная система имеет недостаточн быстродействие и устойчивость. Наиболее близкой к предлагаемой является система управления, содержащая последовательно соединенные задатчик, элемент сравнения, регуля тор, cyh4MaTop, выходом подключенный к входу объекта, состоящего из последовательно соединенных опережающего и инерционного участков объект элемент запаздывания, выход которог подключен к входу первой неполной модели объекта, вторую неполнукз мо дель объекта, .вьпсод которой подключен к второму инверсному входу элемента сравнения, и блок оптимизации СЗ 3, . Однако отсутствие отрицательной обратной связи с выхода объекта и связи, компенсирующей инерционность с выхода первой модели объекта непосредственно на вход регулятора через первый блок сравнения приводит к снижению надежности работы системы, усложнению блока оптимизации и делает-такую систему неприемлемой при автоматизации ответственных технологических п.роцессов, в частности, теплоэ.нёргетических. Снижение надежности и. усложнение связано с раздельной подстройкой моделей и регулятора. Кроме того, в основу подстройки моделей и оптимизации параметров регулятора положен поисковый алгоритм, что приводит к значительному усложнению систе.1ы за счет использования сложных средств вычислительной техники и потерям времени на поиск. Цель изобретения - повышение надежности и быстродействия. Поставленная цель достигается, тем,что система управления для объекта с запаздыванием, содержащая последовательно соединенные задатчик, элемент сравнения, регулятор, сумматор, подключенный выходом к входу объекта, состоящего из последовательно соединенных Опережающего и инерционного участков объекта, элемент запаздывания, выход которого подключен к входу первой неполной модели объекта, вторую неполную модель объекта, выход которой подключен к второму инверсному входу элемента сравнения, и блок оптимизации, соединенный первым выходом с вторым входом регулятора, а -вторьам выходом - с входами первой и второй неполных моделей объекта, снабжена последовательно соединенными эталонными моделями опережающего и инерционного участков объекта, аналого-цифровым преобразователем, блоком отношений, первым-и вторым регистрами отношений, первым и вторым дешифраторами отисянений, блоком анализа и задатчиком допустимых отношений, причем выходы объекта и первой неполной модели объекта соединены соответственно с третьим инверсньлм и четвертым суммирующим входами элемента сравнения, выход опережающего участка объекта подключен к входам второй неполной модели объекта и элемента запаздывания, а также к первому входу аналого-цифрового преобразователя, к трем другим входам которого подключены соответственно выходы эталонных моделей опережающего и инерционного участков объекта и самого объекта, выход сумматора соединен с входом эталонной модели опережавядего участка объекта, входные кодовые шины блока отношений соединены с выходами аналого-цифрового преобразователя, а его две группы выходных кодовых шин подключены -к двум группам входных шин блока анализа и соответственно через первые регистр и дешифратор отношений, вторые регистр и дешифратор отношений - к двум группам параметрических входов блока оптимизации, выходы задатчика допустимых отношений соединены с третьей группой кодовьлх шин блока анализа, управляющие выхо ды которого подключены к входам при оритета блока оптимизации. На фиг, 1 изображена структурная схема систёмы; на фиг, 2 - блок-схё ма возможной реализации одного кана ла блока оптимизации. Система содержит задатчик 1, Эле мент 2 сравнения, регулятор 3, сумматор 4, объект 5, состоящий из опе режающего 6 и инерционного 7 участ ков, элемент 8 запаздывания, первую и вторую неполные модели объекта 9 и 10, блок 11 оптимизации, эталон ные модели, опережающего и инерционного участков объекта 12 и 13, аналого-цифровой преобразователь 14 блок 15 отношений,первый 16 и второй 17 регистры отношений, первый 1 и второй 19 дешифраторы отношений, блок 20 анализа и задатчик 21 допус тимых отношений. Канал блока оптимизации содержит К триггеров 22, реле 23, элементов совпадения и набор резисторов регулятора R, R2, ... . Регулятор 3, реализующий, в част ности, пи-закон управления, может быть выполнен, например как блок регулирования Р21 ГСП Каскад С43. Блок 11 оптимизации предназначен для установки оптимальных значений коэффициентов усиления регулятора 3 а также первой и второй неполньк моделей 9 и 10 объекта. Один из каналов блока 11 оптимизации может быть выполнен, например, согласно t51 (как показано на фиг. 2). Блок 20 Может быть выполнен, , как двоичное сравнивающее устройство на базе микросхем К155 серии, которое для упрощения и повыиюния надёжности включает схемы попарног совпадения разрядов двух двоичных чисел А и В и схемы анализа неравенств разрядов для выражения А В и 6. Текущие отношения сигна лов, поступающих на входы блока 20 анализа с выходов блока 15, принимаются, например, за числа Л, тогда допустимые отношения - за числа В. При этом на двух управлякяцих выхода блока 20 анализа формируются два разрешакяцих сигнала при выполнении неравенств длакс у В., о1к.е , Которые устанавливают ограничения на минимальное и максимальное значения соответственно коэффициентов усиления регулятора 3 и модепей 9 и 10. Это связано с тем, что количество переключательнь х функций п и ru с (ВЫХОДОВ первого 18 и второго 19 дешифраторов в общем случае больше, чем число дискретов в наборах резисторов блока 11 оптимизации, так как рабочие диапазоны коэффициентов усиления регулятора 3 и моделей 9 и 10 ограничены. На фиг. 1 введены следующие обозначения: f - внутренние возмущения, действующие на систему, Хр - регулирукмцее воздействие х и X - промежуточная и основная регулируемые величины,XQC-сигнал основной обратной связи, х,; сигналы компенсации инерционности и упреждения запаздывания соответственно. В основу построения системы управления для Объектов с запаздыванием положен принцип упреждения запаздывания и компенсации инерционности при изменении задания и внутренних возмущений путем оптимизации динамических параметров регулятора и двух неполных моделей объекта соответственно в контурах упрежденчя и к&мпенсации методом непрерывного сравнения сигналов опережающего и инерционного участков объекта с соответствующими сигналами эталонных моделей и путем нахождения их отношений и получения набора переключательных функций для управления динамической настройкой параметров регулятора и двух неполных моделей объекта. При этом передаточная функция объекта определяется выражением %5 . «2Г гдeWoп Wp(p) и W H V/wHlf - соответственно передаточные функции опережающего 6 и инерционного 7 участков объекта 5. Передаточную функцию W, можно представить в виде N1/ К W ин ин ин где К„„,„ - соответственно коэффициент усиления,.приведенная передаточная функция и время запаздывания инерционного участка 7 объекта 5. Передаточная функция Wj,n для теплоэнергетических объектов имеет обычно вид апериодического эвена первого порядка с небольшой постоянной зремени TQ, и коэффициентом усиления Коп Передаточная функция x/, имеет вид одного, двух или трех последовательно соединенньЕС апериодических звеньев первого порядка в зависимости от аппроксимации со значительно большей сукмарной эквивален ной постоянной, обуславливающей ин ционность. Значение f может быть постоянны например, в системах управления пр цессом горения, использующих хрома тографический газоанализатор, или известным, т.е. определенным при эксперименте или автоматическим способом. С учетом I2 I и (3) и предлагаемой . структуры систекы управления для компенсации инерционности используется элемент 8 запаздывания и первая неполная модель 9 инерционного участка с передаточ ной функцией К„„« е «цн, для уп реждения запаздывания используется вторая модель с передаточной функцией „ ., Р этом В обоих контурах как в контуре компенсации инерционности, так и в контуре упреждения запаздывания использует ся опережающий участок 6 объекта с передаточной функцией , что дополнительно способствует повьниен нгщежносии и быстродействия системы. Сигналы основной обратной связи «ос f контура упреждения запаздывания Xocj и контура компенсации инер ционности Хос соответственно равны ос р%п „н; ОС i(5) c, V%nWHH/VW,K,,. (t) Выходные сигналы эталонных моделей 13 и 14 опережающего и инерционного участков с передаточными функциями %„ и W определяются выражениями х х W {7( «1 onj Сигналы опережающего и инерцион ного участков 6 и 7 равны у у ш р оп Компенсация инерционности происходит при равенстве (41 и (51, что возможно при условии .л bJ Ij а упреждение запаздывания с минимальной среднеквадратичной погрешностью будет иметь место при н, Х и/Ч„- ( Если условия (11F и (12) выполняются, то запаздывание выносится из.замкнутого контура регулирования. В этом случае реакция системы является задержанной версией входного сигнала, что обеспечивает воз можность работы системы с максимальным быстродействием, как и для системы без запаздывания. Однако зто требует адаптации системы при изменении ее характеристик, в первую очередь, за счет изменения параметров объекта от нагрузки и с течением времени. При адаптивной подстройке коэффициентов усиления регулятора 3, первый и второй неполных моделей 9 и 10 объекта принимается, что все различия между выходными сигналами опережающего и инерционного участков 6 и 7 объекта 5 с соответствукадими сигналами эталонных моделей 12 и 13 -«i,r эт обусловлены несовпадением текущих коэффициентов усиления в момент измерения. Это предложение является особенно оправданным в данной системе, где запаздывание известно и может быть с достаточной точностью промоделировано с помощью элемента 8 запаздывания. Оценками несоответствия служат отношения -tS/NaT ИЗ) 2.,Г И) Эталонные модели 12 и 13 опережающего и инерционного участков объекта не подстраиваются. Их параметры в общем случае могут быть выбраны по одному из возможных состояний объекта 5, например,-при Минимальной нагрузке, когда коэффициенты усиления и эквивалентные постоянные времени участков 6 и 7 принимают максимальные значения. Тогда, если объект 5 находится в указанном выше состоянии, выполняются условия 11 и 12 и регулятор 3 подстроен соответствующим образс 1, то отнсяиение 13 и 14 равны единице. С учетом опустимой зоны регулирования отношения могут отличаться от единицы на некоторую,величину 4 . Эти отношения условно принимаются за базовые - сГ;,. и Г , при этом подстройка коэффициентов усиления локов системы не производится. Воз- . можны три случая; rf э или сГ 5(5, или имеют место оба неравенства одновременно. Между отношениями сГ:,, и коэфициентами усиления регулятора 3 kp и моделей 9 и10 (К„н ин 4н соответственно имеются однозначные завистилости. Так, например, ля подстройки Кр при использовании известного критерия оптимизаии минимума среднеквадратичной шибки регулирования можно испольоватьКрКд const , для подстройки .Кии,, и «„„ - уелиие (12). G учетом принятого услоИЯ, что все изменения объекта 5
отнесены к изменению коэффициентов усиления участков 6 и 7, отношення (131 и (14) можно представить в виде . ff -V%r
ОП; (Г
1-л,
ин
зт
Выражения (12, (15-17/ показыва что Кр изменяется обратно пропорционально tf и оптимизируется при изменении опережающего/участка 6, а изменяются прямо пропорционально сГг и оптимизируются при изменении инерционного участка 7 объекта 5.
Коэффициент усиления регулятора 3(4) и моделей 9 и 10 изменяется с помо(цью резисторов обратной связи усилителей. Поэтому отношениям (Г., и cTj учетом принятого числа переключательных функций К из п соответствующих упомянутые выше наборы резисторов Рр и R/, .
Система управления . (фиг. 1) работает следующим образом.
В установившемся режиме регулируемая величина находится в предела допустимой зоны регулирования +д. В первом и втором регистрах 16 и 17 отношений находятся коды, соответствующие выражениям (13) и (14), которые расшифровываются первым и вторым дешифратором 18 и 19 отног шений, переключающие выходы которых устанавливают через блок 11 оптимальные параметры динамических настроек регулятора 3 и обеих неполных моделей 9 и 1О.
При изменении задания .на выходе элемента 2 сравнения появляется сигнал ошибки, который отрабатывается регулятором 3. Отработка рассогласования производится через опережающий участок 6 объекта 5 и вторую неполную модель 10 объекта. Ине ционная часть 7 объекта 5 при этом не влияет на устойчивость системы, так как выходной сигнал системы компенсируется сигналом с вь2хода первой неполной модели 9
объектаXQC. При этом выполняется прежнее условие оптимальной настройки, и оптимизация не производится.
При изменении отношения (13/, которое может произойти из-за изменения опережающего участка 6 объекта 5 или при внутренних возмущениях f . В этом случае через аналого-цифровой преобразователь 14 и блок 15 отношений изменяется кед nefiBoro регистра 16 отношений, который переключает первый дешифратор 18 в новое состояние. Блок 20 проверяет код отношения согласно 11) и через блок 11 оптимизации изменяет коэффициент усиления регулятора 3.
Во втором случае при изменении (14) аналогичным образом изменяется код во втором регистре 17 отнсяиений и через второй дешифратор 19 с помощью блока 20 анализа через блок 11 оптимизации осуществляет установку новых значений коэффициентов первой и второй неполных моделей 9 и 10 объекта.
В тре-.ьем случае, когда изменяются одновременно отношения (13) и (14) производится оптимизация как коэффициента усиления регулятора 3, так и обеих моделей 9 и 10.
Таким образом, применение в системе эталонных моделей опережающего и инерционного участков объекта; аналого-цифрового преобразователя, блока отношений двух регистров и . дешифраторов отношений, блока анали и задатчика допустимых отношений, связанных между собой и с известными блоками определенным образом, а также введение более надежных связей позволяет повысить надежность системы, а применение беспоискового алгоритма - ее быстродействие.
Веспоисковая адаптивная настройк системы управления позволит получить экономический эффект порядка 15 тыс.руб. при реализации одного контура управления. Экономический эффект для энергоблока составит около 60 тыс.руб. в год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Автоматическая система регулирования с опережающим скоростным сигналом | 1981 |
|
SU991373A1 |
| Автоматическая система регулирования температуры пара котлоагрегата | 1984 |
|
SU1224503A1 |
| Адаптивная система регулирования для объектов с изменяющимся запаздыванием | 1980 |
|
SU968788A1 |
| Автомат-настройщик двухконтурных систем регулирования с опережающим сигналом | 1987 |
|
SU1624245A1 |
СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ, содержа- щая последовательно соединенные задатчик, элемент сравнения, регулятор, сумматор, подключенный выходом к входу объекта, состоящего из последовательно соединенных опережающего и инерционного участков объекта,, элемент запаздывания, выход которого подключен к входу первой неполной модели объэкта, вторую неполную модель объекта, выход которой подключен к второму инверсному входу элемента сравнения, и блок оп.тимизацйи, соединенный первым выходом с вторым входом регулятора, а вторым выходом - с входами первой и второй неполных моделей объекта, отличающаяся тем, что, с целью повьвяения надежности и быстродействия, она снабжена последовательно соединенными эталонными моделями опережающего и инерционного участков объекта/ аналого-цифровым преобразователем,, блоком отношений, перпым и вторым регистрами отношений, первым и вторым дешифраторами отношений, блоком анализа и згедатчиком. допустимых отноигений, причем выходы объекта и первой неполной модели объекта соединены соответс-твенно с третьим инверсным и четвертым суммирующим входами з1лемента (Л сравнения, выход опережающего участка объекта подключен к входам второй неполной модели объекта и элемента запаздывания, а также к первому входу аналого-цифрового.преобразователя, к трем другим входам которого подключены соответственно выходы эталонных моделей опережающего и инер sl ционного участков объекта и самого о объекта, выход сумматора соединен с входом эталонной модели опережающеел го участка объекта, входные кодовые О шины блока отношений соединены с выходами аналого-цифрового преобрао зователя, а его две группы выходных кодовых шин подключены к двум группам входных шин блока анализа, и соОтветственно через первые регис- р и дешифратор отношений, вторые регисгр ч дешифратор отношений - .к двум группам параметрических входов блока оптимизации, выходы задатчика допустимых отношений соединены с третьей группой кодов1лх шин блока анализа, управляющие выходы которого подключены ко входам приоритета блока оптимизации.