Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству наложения хирургического шва с функцией сшивания. Более конкретно, настоящее изобретение относится к устройству наложения хирургического шва, с помощью которого оператор, такой как хирург, может точно, быстро и легко накладывать швы на ткани человеческого тела.
Уровень техники
При хирургической операции важно накладывать швы на различные слои ткани человеческого тела, такие как серозная оболочка, мышца, фасция и кожа. Большими проблемами в этом процессе наложения шва являются минимизация, за счет времени, требующегося для наложения шва, усталости оператора и времени анестезии, способствование залечиванию ран и минимизация потери крови. Кроме того, минимизация шрамов, вызванных хирургической операцией, может быть необходима с точки зрения красоты пациента.
Описание изобретения
Техническая проблема
Традиционный процесс наложения швов обычно выполнялся способом, при котором оператор вручную накладывал швы на человеческие ткани, используя хирургические иглы и нитки для сшивания.
Однако, в соответствии с традиционным процессом наложения швов, основанным на ручной работе оператора, время проведения операции часто увеличивается из-за недостаточности навыков оператора и его опыта в наложении швов. Это может приводить к повышенной усталости оператора, более длительному времени анестезии или трудности управления кровью.
Дополнительно, поскольку степень шрамов, вызванных наложением швов, зависит от того, насколько однородно и плотно делаются стежки, при традиционном ручном наложении швов однородность и плотность стежков не могут гарантироваться.
Техническое решение
Задачей настоящего изобретения является решение упомянутых выше проблем.
Другая задача настоящего изобретения состоит в том, чтобы обеспечить устройство наложения хирургического шва, позволяющее оператору выполнять наложение шва точно и легко.
Еще одной задачей настоящего изобретения является обеспечение устройства наложения хирургического шва для сокращения времени, требующегося для наложения шва.
Еще одной другой задачей настоящего изобретения является обеспечение устройства наложения хирургического шва для минимизации шрамов, вызванных наложением швов.
И еще одной другой задачей настоящего изобретения является обеспечение устройства наложения хирургического шва, соединенного с внешним устройством, таким как система хирургического робота с манипулятором, чтобы позволить оператору выполнить автоматизированное наложение шва.
Эффекты, дающие преимущества
В соответствии с настоящим изобретением, оператор может выполнять шов точно и легко.
В соответствии с настоящим изобретением, может быть сокращено время наложения шва.
В соответствии с настоящим изобретением, шрамы, вызванные наложением швов, могут быть минимизированы.
В соответствии с настоящим изобретением, обеспечивается устройство наложения хирургического шва, соединенное с внешним устройством, таким как система хирургического робота, чтобы позволить оператору выполнять автоматизированное наложение шва.
Краткое описание чертежей
Упомянутые выше задачи и признаки настоящего изобретения станут очевидными из последующего описания предпочтительных вариантов осуществления, приведенного в сочетании с сопроводительными чертежами, на которых:
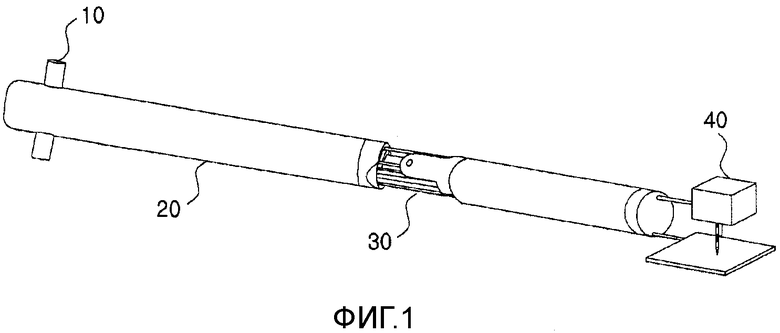
Фиг. 1 - общая конфигурация устройства наложения хирургического шва, соответствующего одному варианту осуществления настоящего изобретения.
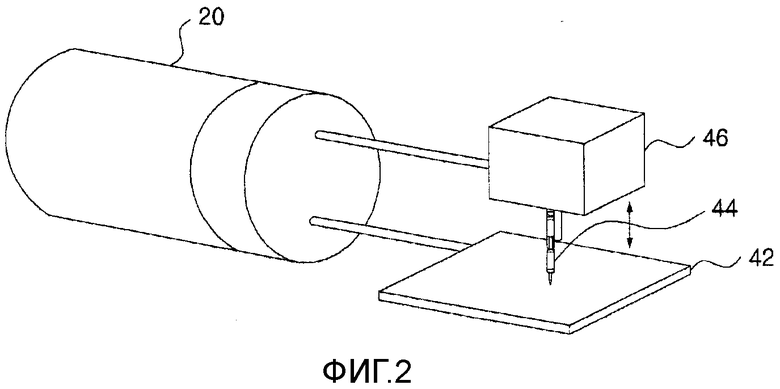
Фиг. 2 - подробная конфигурация части 40 наложения шва устройства наложения хирургического шва, соответствующего одному варианту осуществления настоящего изобретения.
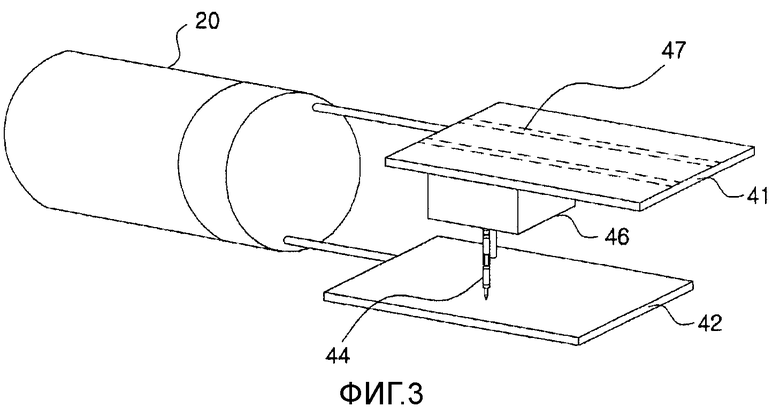
Фиг. 3 - подробная конфигурация части 40 наложения шва устройства наложения хирургического шва, соответствующего другому варианту осуществления настоящего изобретения.
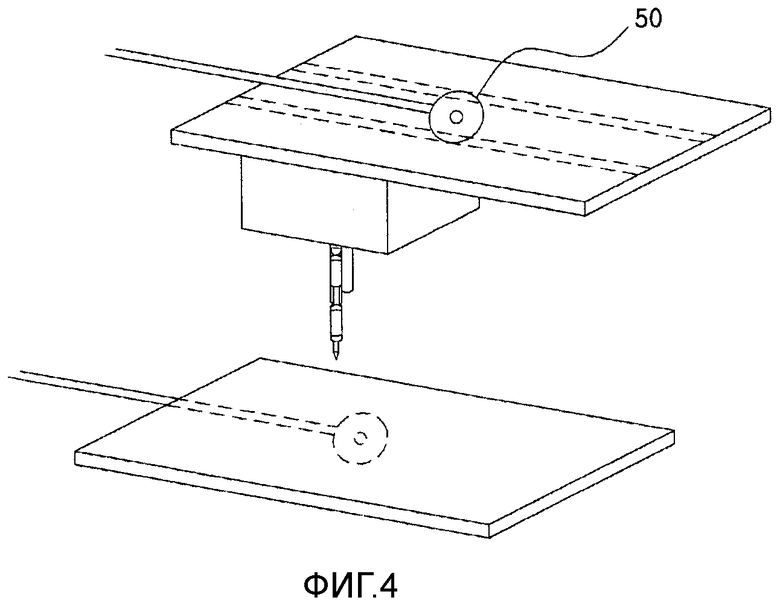
Фиг. 4 - подробный чертеж, показывающий вращающуюся часть 50, присоединенную к части 40 наложения шва.
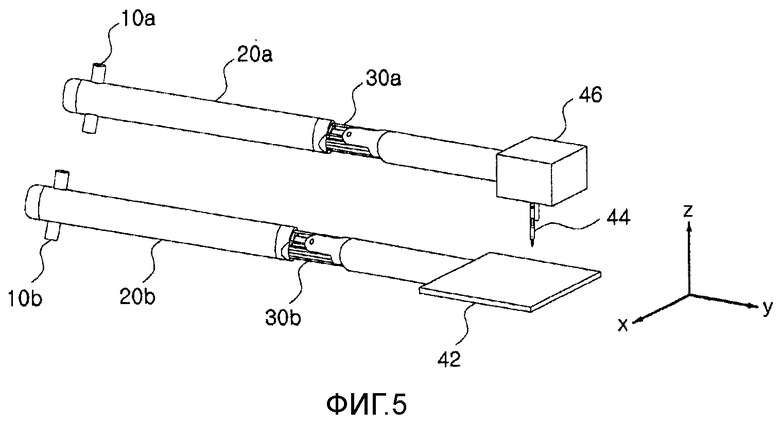
Фиг. 5 - конфигурация устройства наложения хирургического шва, соответствующего еще одному варианту осуществления настоящего изобретения.
Наилучший способ осуществления изобретения
Ниже представлены несколько характерных конфигураций для решения упомянутых выше задач настоящего изобретения.
В соответствии с одним вариантом настоящего изобретения, обеспечивается устройство наложения хирургического шва, содержащее: соединительную часть, часть стержня, присоединенную к соединительной части, рабочую часть и часть наложения шва, соединенную с частью стержня посредством рабочей части, причем часть наложения шва содержит основание, хирургическую иглу и часть управления иглой, в котором хирургическая игла действует в направлении, по существу, ортогональном основанию, за счет части управления иглой, и хирургическая нить из хирургической иглы и нить для наложения шва из основания переплетаются друг с другом посредством операций.
В соответствии с другим вариантом настоящего изобретения, обеспечивается устройство наложения хирургического шва, содержащее: первую соединительную часть и вторую соединительную часть, первую часть стержня, соединенную с первой соединительной частью, и вторую часть стержня, соединенную со второй соединительной частью, первую рабочую часть и вторую рабочую часть, и первую часть наложения шва, соединенную с первой частью стержня посредством первой рабочей части, и вторую часть наложения шва, соединенную со второй частью стержня посредством второй рабочей части, в котором первая часть наложения шва включает хирургическую иглу и часть управления иглой, и вторая часть наложения шва включает основание, и в котором хирургическая игла действует в направлении, по существу, ортогональном основанию, за счет части управления иглой, и нить для наложения шва из хирургической иглы и нить для наложения шва из основания переплетаются друг с другом посредством операций.
Режим работы для изобретения
В последующем подробном описании делается ссылка на сопроводительные чертежи, которые показывают, посредством примера, конкретные варианты осуществления, в которых настоящее изобретение может быть осуществлено практически. Эти варианты осуществления описываются достаточно подробно, чтобы позволить специалистам в данной области техники осуществить настоящее изобретение на практике. Следует понимать, что различные варианты осуществления настоящего изобретения, хотя и различаются, необязательно являются взаимно исключающими. Например, конкретный признак, структура или характеристика, описанные здесь в связи с одним вариантом осуществления, могут быть осуществлены в рамках других вариантов осуществления, не отступая от сущности и объема настоящего изобретения. Кроме того, следует понимать, что местоположение или порядок расположения индивидуальных элементов в пределах каждого раскрытого варианта осуществления могут изменяться, не отступая от сущности и объема настоящего изобретения. Нижеследующее подробное описание недолжно, поэтому, рассматриваться в ограничительном смысле и объем настоящего изобретения определяется только прилагаемой формулой изобретения, соответственно интерпретируемой, вместе с полным рядом эквивалентов, на которые дает право формула изобретения. На чертежах схожие ссылочные позиции относятся к одним и тем же или схожим функциональным особенностям на нескольких видах.
Настоящее изобретение теперь будет описано более подробно со ссылкой на сопроводительные чертежи.
На фиг. 1 представлена общая конфигурация устройства наложения хирургического шва, соответствующего одному варианту осуществления настоящего изобретения.
Как показано на фиг. 1, устройство наложения хирургического шва, соответствующее одному варианту осуществления настоящего изобретения, может содержать соединительную часть 10, часть 20 стержня, рабочую часть 30 и часть 40 наложения шва.
В соответствии с одним вариантом осуществления настоящего изобретения, соединительная часть 10 позволяет устройству наложения хирургического шва соединяться с внешним устройством, таким как система хирургического робота с манипулятором.
В отношении соединения хирургического устройства с системой хирургического робота или манипулятора мы можем обратиться к корейской выложенной патентной публикации № 2005-100147 (дата публикации: 18 октября 2005 г.), и к корейской выложенной патентной публикации № 2008-89579 (дата публикации: 7 октября 2008 г.). Здесь содержание вышеупомянутых двух публикаций должно считаться присутствующим в настоящем описании во всей их полноте.
В соответствии с одним вариантом осуществления настоящего изобретения, часть 20 стержня может содержать стержень, один конец которого соединяется с соединительной частью 10, а другой конец соединяется с рабочей частью 30. В части 20 стержня могут находиться управляющие части, такие как проволока для управления рабочей частью 30 и/или частью 40 наложения шва. Дополнительно, стержень может физически поддерживать устройство наложения хирургического шва, соответствующее настоящему изобретению.
В соответствии с одним вариантом осуществления настоящего изобретения, рабочая часть 30 может соединять часть 40 наложения шва с частью 20 стержня и регулировать положение и угол части 40 наложения шва относительно части 20 стержня в ответ на заданный управляющий сигнал от внешнего устройства. Рабочая часть 30 может содержать больше чем две шарнирные части для выполнения операции по направлению крена и/или операции по направлению рыскания в случае необходимости. Чтобы сконфигурировать рабочую часть 30, дополнительно может быть использован любой раскрытый принцип конструирования шарнирной части хирургического устройства.
Ниже будет описана часть 40 наложения шва, соответствующая нескольким вариантам осуществления настоящего изобретения. На фиг. 2 представлен подробный чертеж, показывающий конфигурацию части 40 наложения шва устройства наложения хирургического шва, соответствующего одному варианту осуществления настоящего изобретения.
Со ссылкой на фиг. 2, часть 40 наложения шва является элементом для наложения шва на ткани человеческого тела и, более подробно, может иметь нижнее основание 42, хирургическую иглу 44 и часть 46 управления иглой для приема хирургической иглы 44 и действия хирургической иглой 44 в направлении, по существу, ортогональном нижнему основанию 42. Здесь далее, для примера, показано, что основание части 40 наложения шва в соответствии с настоящим изобретением является нижним, но следует понимать, что основание, расположенное напротив хирургической иглы 44, может быть помещено сверху хирургической иглы 44, если это необходимо.
В соответствии с одним вариантом осуществления настоящего изобретения, часть 40 наложения шва может накладывать шов на человеческие ткани, следуя тому же или похожему способу, которым действует известная швейная машина, которая использовалась для шитья одежды с давних времен. Другими словами, человеческие ткани могут сшиваться связыванием или сплетением нити для шва, поступающей от хирургической иглы 44, с нитью для шва, поступающей от нижнего основания 42, следуя движению вверх-вниз хирургической иглы 44. Предпочтительно, в этом случае важно, чтобы нити для шва от хирургической иглы 44 и нижнего основания 42 переплетались друг с другом, но не путались. Дополнительно, нить для шва, используемая в устройстве наложения хирургических швов, соответствующем настоящему изобретению, может, главным образом, обеспечиваться со стороны части 40 наложения шва. Эта нить для наложения шва предпочтительно может быть одноразовой с точки зрения санитарии. Аналогично, хирургическая игла 44, используемая в устройстве наложения хирургических швов, соответствующем настоящему изобретению, предпочтительно может быть одноразовым модулем иглы.
В соответствии с одним вариантом осуществления настоящего изобретения, часть 40 наложения шва может приводить в действие управляющую часть 46 иглы, основываясь на управляющем сигнале, введенном от внешнего устройства, такого как система хирургического робота. Например, хирургическая игла 44 части 40 наложения шва может двигаться в направлении, по существу, ортогональном нижнему основанию 42, следуя за манипуляциями оператора на внешнем устройстве.
В этом случае оператор может использовать различные варианты. Например, оператор может выбрать один из следующих вариантов, чтобы вести хирургическую иглу 44 (или часть 40 наложения шва), которые воспроизводят несколько основных функций известной швейной машины и особенно предпочтительны при выполнении хирургической операции.
1. 3-х слойный шов: сшивание трех слоев ткани, не только двух слоев ткани.
2. 3-х строчечный шов: сшивание тремя нитями, зацепляемыми хирургической иглой 44.
3. 4-х строчный шов: сшивание четырьмя нитями, зацепляемыми хирургической иглой 44.
4. Зигзагообразный шов: шов, выполняемый частью 40 наложения шва, управляемой, чтобы двигаться зигзагом.
5. Параллельный шов: сшивание двух слоев ткани, стороны которых соприкасаются друг с другом.
6. 2-х игольный шов: сшивание двумя хирургическими иглами 44.
7. Эластичный шов: сшивание эластичной нитью.
8. Обметочный шов: сшивание способом, при котором нить накручивается в форме пружины.
9. Вышивание: вышивание чего-либо (например, даты хирургической операции или маркировки) на ткани.
10. Стежковый шов: соединение швом объекта (например, искусственного органа) и ткани так, чтобы объект был прикреплен к ткани.
11. Потайной шов: соединение швом таким образом, что нить не видна снаружи ткани.
12. Оверлочный шов: шов по краю одной или двух тканей для обшивки края, обметки или сшивания.
13. Лигатурный шов: наложение шва, пока кровеносный сосуд не перетянут.
Дополнительно, в соответствии с одним вариантом осуществления настоящего изобретения, оператор может управлять продвижением шва в части 40 наложения шва. Например, часть 40 наложения шва может приводиться в движение по мере того, как оператор управляет продвижением шва, выбирая автоматический режим или полуавтоматический режим через внешнее устройство. В автоматическом режиме часть 40 наложения шва продолжает выполнять наложение шва в направлении, в котором он выполнялся бы, если бы оператор не давал команду остановки наложения шва. В полуавтоматическом режиме часть 40 наложения шва может остановить наложение шва после окончания назначенного количества стежков даже при том, что оператор не прерывает наложение шва.
В соответствии с одним вариантом осуществления настоящего изобретения, промежуток между двумя стежками и скорость наложения шва, которые являются основными факторами для различных видов сшивания, как описано выше, могут быть определены оператором. Предпочтительно, промежуток и/или скорость наложения шва могут определяться квалифицированным оператором в соответствии с разными видами сшиваемых тканей (например, ткани кровеносного органа, ткани дыхательного органа или кожные ткани). Дополнительно, промежуток и/или скорость наложения шва могут быть определены по выбору оператора из нескольких заданных режимов наложения шва, основанных на виде тканей, которые будут сшиваться. Дополнительно, может применяться конфигурация, в которой, в случае, если длина тканей, которые должны сшиваться, слишком велика, длина части 20 стержня имеет возможность увеличиваться или уменьшаться по мере движения части 40 наложения шва.
Устройство наложения хирургического шва, соответствующее настоящему изобретению, может быть неограниченно применяемым для любого вида хирургии (например, лапаротомия). Таким образом, оно может применяться к инвазивной хирургии, такой как лапароскопическая хирургия и эндоскопическая хирургия. В этом случае устройство наложения хирургического шва может быть конфигурировано иначе, чем показано на фиг. 1 или фиг. 2. Например, часть 20 стержня может быть выполнена с возможностью быть пригодной (например, более быть тонкой и более длинной) для инвазивной хирургии, рабочая часть 30 может иметь множество шарнирных частей или часть 40 наложения шва может быть миниатюризирована. Следуя одному из упомянутых выше предложений, устройство наложения хирургического шва может легко вводиться. Дополнительно, вместе с устройством наложения хирургического шва, соответствующим настоящему изобретению, могут использоваться эндоскоп для обеспечения видимости оператору или пара пинцетов для поднимания человеческих тканей, которые должны сшиваться.
В соответствии с другим вариантом осуществления настоящего изобретения, устройство наложения хирургического шва может содержать соединительную часть 10, часть 20 стержня, рабочую часть 30 и часть 40 наложения шва, как показано на фиг. 2, на котором форма части 40 наложения шва в некоторой степени изменена. На фиг. 3 представлен подробный чертеж, показывающий конфигурацию части 40 наложения шва устройства наложения хирургического шва, соответствующего другому варианту осуществления настоящего изобретения.
Со ссылкой на фиг. 3, часть 40 наложения шва может содержать верхнее основание 41 и нижнее основание 42, расположенные напротив друг друга, хирургическую иглу 44 и часть 46 управления иглой для приема хирургической иглы 44 и приведения в движение хирургической иглы 44 в направлении, по существу, ортогональном нижнему основанию 42. Дополнительно, часть 46 управления иглой может быть расположена в верхнем основании 41 и выполнена с возможностью движения в заданном диапазоне вдоль линии рельса 47, расположенного на верхнем основании 41.
В соответствии с настоящим вариантом осуществления, длина части 20 стержня необязательно может увеличиваться или уменьшаться, потому что часть 46 управления иглой проходит вдоль линии рельса 47 и движется для наложения шва. В этом состоит разница между настоящим вариантом осуществления и вариантами, описанными выше.
В случае, когда устройство наложения хирургического шва, соответствующее упомянутому выше варианту осуществления, применяется в инвазивной хирургии, может возникнуть проблема, что отверстие, используемое для инвазивной хирургии, должно быть больше из-за относительно большой ширины верхнего основания 41 и нижнего основания 42.
Для решения этой проблемы, как показано на фиг. 4, вращающаяся часть 50 может быть соединена с частью 40 наложения шва. На фиг. 4 представлен подробный чертеж, показывающий вращающуюся часть 50, соединенную с частью 40 наложения шва.
Со ссылкой на фиг. 4, вращающаяся часть 50 может быть соединена с частью 40 наложения шва так, что она может вращаться в пределах заданного углового диапазона, и часть 40 наложения шва, соединенная с вращающейся частью 50, может быть выполнена с возможностью вращения вместе с вращающейся частью 50. Поэтому, прежде чем часть 40 наложения шва пройдет через хирургическое отверстие, верхнее основание 41 и нижнее основание 42 могут быть расположены параллельно части 20 стержня, управляя вращающейся частью 50. После этого направление части 40 наложения шва может быть изменено, что должно быть предпочтительно для наложения шва, снова управляя вращающейся частью 50.
На фиг. 5 представлен чертеж, показывающий конфигурацию устройства наложения хирургического шва, соответствующего еще одному варианту осуществления настоящего изобретения. В соответствии с еще одним вариантом осуществления настоящего изобретения, устройство наложения хирургического шва может содержать первую соединительную часть 10a, вторую соединительную часть 10b, первую часть 20а стержня, вторую часть 20b стержня, первую рабочую часть 30a, вторую рабочую часть 30b, нижнее основание 42, хирургическую иглу 44 и часть 46 управления иглой, соединенную с ней.
В соответствии с настоящим вариантом осуществления, верхняя часть части 40 наложения шва, содержащая хирургическую иглу 44 и часть 46 управления иглой, может быть соединена с первой соединительной частью 10a и первой частью 20a стержня посредством первой рабочей части 30a, как показано на фиг. 5, и нижняя часть части 40 наложения шва, имеющая нижнее основание 42, может быть соединена со второй соединительной частью 10b и второй частью 20b стержня посредством второй рабочей части 30b, как показано на фиг. 5. Здесь, первая соединительная часть 10a, первая часть 20a стержня и первая рабочая часть 30a могут быть отделены от второй соединительной части 10b, второй части 20b стержня и второй рабочей части 30b.
В соответствии с настоящим вариантом осуществления, шарнирные движения, в то время, когда устройство наложения хирургического шва используется в человеческом теле, могут стать более свободными. Другими словами, первая рабочая часть 30a и вторая рабочая часть 30b устройства наложения хирургического шва могут совершать различные шарнирные движения друг относительно друга, по мере необходимости, и, таким образом, верхняя часть и нижняя часть части 40 наложения шва устройства наложения хирургического шва могут управляться раздельно. Дополнительно, по мере необходимости, первая рабочая часть 30a и вторая рабочая часть 30b могут управляться двумя манипуляторами одной системы хирургического робота, соответственно. В этом случае, один манипулятор может присоединяться к первой рабочей части 30a или ко второй рабочей части 30b, чтобы управлять первой рабочей частью 30a и второй рабочей частью 30b, независимо от формы первой соединительной части 10a или второй соединительной части 10b.
В случае применения упомянутых выше конфигураций (а именно, конфигураций для устройства наложения хирургического шва разделительного типа), предпочтительные эффекты могут быть определены следующим образом. Во-первых, нет необходимости вводить все устройство наложения хирургического шва через одно хирургическое отверстие, даже при наложении шва на ткани трубчатого органа, и, таким образом, будет легче выполнять наложение шва вокруг трубчатого органа и извлекать устройство наложения хирургического шва из хирургического отверстия после наложения шва. Дополнительно, но не в случае наложения шва на ткани трубчатого органа, для введения устройств наложения хирургического шва возможно использовать хирургические отверстия меньшего размера, когда инвазивная хирургия производится, используя множество хирургических отверстий. Это может привести к меньшей боли, быстрому выздоровлению и минимизированным шрамам.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, устройство наложения хирургического шва может быть осуществлено более сложным образом следующим способом. Во-первых, система хирургического робота для управления первой рабочей частью 30a и второй рабочей частью 30b может собрать историю работы первой рабочей части 30a и определить местоположение первой части 40a наложения шва относительно опорной точки. Здесь предполагается, что первая часть 40a наложения шва уже расположена вблизи тканей, которые должны сшиваться, и опорная точка определяется заранее системой хирургического робота. Затем, система хирургического робота может автоматически управлять второй рабочей частью 30b, основываясь на истории работы первой рабочей части 30a и местоположении первой части 40a наложения шва, так чтобы вторая часть 40b наложения шва могла быть расположена вблизи первой части 40a наложения шва. И затем, оператор может точно определить местоположение нижнего основания 42 второй части 40b наложения шва, которая должна находиться напротив верхнего основания 41 первой части 40a наложения шва. Чтобы осуществить описанное выше, могут использоваться известные технологии управления местоположением, обращаясь к описаниям на предшествующем уровне техники (например, описание американской патентной публикации № 2004-143243 (дата публикации: 22 июля 2004 г.)).
Хотя были показаны и описаны варианты осуществления изобретения, специалистам в данной области техники должно быть понятно, что в них могут быть сделаны различные изменения и модификации, не отступая от сущности и объема изобретения, описанных в последующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ТРУБЧАТОГО МЕДИЦИНСКОГО ИМПЛАНТАТА | 2002 |
|
RU2425656C2 |
| АППАРАТ ДЛЯ НАЛОЖЕНИЯ МЕХАНИЧЕСКОГО ШВА | 2005 |
|
RU2299023C2 |
| ИНСТРУМЕНТЫ И СПОСОБЫ ДОСТАВКИ НИТИ ДЛЯ ЭНДОСКОПИЧЕСКОЙ И РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2011 |
|
RU2568538C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕДИЦИНСКОГО ТРАНСПЛАНТАТА-СТЕНТА | 2002 |
|
RU2297199C2 |
| Устройство хирургическое для сшивания тканей и способ выполнения шва с данным устройством | 2023 |
|
RU2815150C1 |
| СШИВНОЕ УСТРОЙСТВО ДЛЯ ВОЗВРАТА И ФИКСИРОВАНИЯ ВИСОЧНО-НИЖНЕЧЕЛЮСТНОГО СУСТАВНОГО ДИСКА | 2010 |
|
RU2471443C2 |
| ПОКРЫТИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИГЛ И СПОСОБЫ ИХ НАНЕСЕНИЯ | 2010 |
|
RU2526164C2 |
| ПОКРЫТИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИГЛ И СПОСОБЫ ИХ НАНЕСЕНИЯ | 2010 |
|
RU2569131C2 |
| УСТРОЙСТВО РАСТЯЖЕНИЯ КОЖИ | 2016 |
|
RU2718320C2 |
| ШОВНАЯ НИТЬ ДЛЯ БЕЗУЗЛОВОГО ШВА И НАБОР, В СОСТАВ КОТОРОГО ВХОДИТ ЭТА ШОВНАЯ НИТЬ | 2012 |
|
RU2616762C2 |
Изобретение относится к хирургии. Устройство наложения хирургического шва содержит верхнее основание, нижнее основание, хирургическую иглу, часть управления иглой, причем верхнее основание включает в себя рельс, нижнее основание, хирургическая игла и часть управления иглой образуют часть наложения шва, при этом хирургическая игла действует относительно нижнего основания за счет части управления иглой так, что первая нить для наложения шва из хирургической иглы и вторая нить для наложения шва из нижнего основания переплетаются друг с другом за счет действия хирургической иглы, причем часть управления иглой выполнена с возможностью движения вдоль рельса, расположенного на верхнем основании, и обращена к нижнему основанию, при этом как верхнее основание, так и нижнее основание и часть наложения шва включают вращающуюся часть. Устройство позволяет уменьшить время наложения шва, уменьшить риск образования рубцов. 2 з.п. ф-лы, 5 ил.
1. Устройство наложения хирургического шва, содержащее:
верхнее основание,
нижнее основание,
хирургическую иглу и
часть управления иглой,
причем верхнее основание включает в себя рельс, и
нижнее основание, хирургическая игла и часть управления иглой образуют часть наложения шва,
при этом хирургическая игла действует относительно нижнего основания за счет части управления иглой так, что первая нить для наложения шва из хирургической иглы и вторая нить для наложения шва из нижнего основания переплетаются друг с другом за счет действия хирургической иглы,
причем часть управления иглой выполнена с возможностью движения вдоль рельса, расположенного на верхнем основании, и обращена к нижнему основанию, и
при этом как верхнее основание, так и нижнее основание и часть наложения шва включают вращающуюся часть.
2. Устройство наложения хирургического шва по п. 1, дополнительно содержащее рабочую часть, которая включает по меньшей мере одну шарнирную часть для обеспечения части наложения шва с возможностью шарнирного движения.
3. Устройство наложения хирургического шва по п. 1, в котором часть наложения шва выполняет по меньшей мере один шов, выбранный из следующих швов: 3-х слойный шов, 3-х строчечный шов, 4-х строчечный шов, зигзагообразный шов, параллельный шов, 2-х игольный шов, эластичный шов, обметочный шов, вышивание, стежковый шов, потайной шов, оверлочный шов и лигатурный шов.
| УСТРОЙСТВО ДЛЯ УШИВАНИЯ ТКАНЕЙ МЯГКОЙЛИГАТУРОЙ | 1971 |
|
SU433913A1 |
| RU 2007103536 A, 10.08.2008 | |||
| US 20060190032 A1, 24.08.2006 | |||
| Инструменты для открытых хирургических операций | |||
| Циркулярные сшивающе-режущие аппараты | |||
| [ON-LINE], 28.10.2008, [найдено 25.06.2013], http://www.nda.ru/reclama/PDF/ethicon%20stepler.pdf | |||
| SHINSUKE USUI et al | |||
| Laparoscopy-assisted esophagoenteral anastomosis using | |||

