ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу управления электрической мощностью и к устройству управления электрической мощностью.
УРОВЕНЬ ТЕХНИКИ
[0002] Известен способ управления электрической мощностью с широтно-импульсной модуляцией (PWM) в качестве одного из способа управления электрической мощностью, который позволяет преобразовывать мощность постоянного тока в мощность переменного тока и подает мощность переменного тока на трехфазный двигатель переменного тока.
[0003] Общий способ управления электрической мощностью PWM последовательно измеряет ток, подаваемый на двигатель в моменты времени, когда несущая волна достигает максимума или минимума, и получает предписанное значение заполнения согласно измеренному току и необходимому крутящему моменту для двигателя. Способ сравнивает предписанное значение заполнения с несущей волной по величине и осуществляет включение/отключение переключающих элементов на инверторе на основании результата сравнения. Это позволяет управлять шириной импульса напряжения, подаваемого на двигатель, подавая желаемую электрическую мощность на двигатель.
[0004] Обработка такого способа управления электрической мощностью PWM реализуется полупроводниковой микросхемой. Во многих случаях определяется диапазон температур, в котором полупроводниковая микросхема работает стабильно. Таким образом, в случае повышения температуры самой полупроводниковой микросхемы или в аналогичном случае, если полупроводниковая микросхема генерирует тепло вследствие работы переключающих элементов, полупроводниковая микросхема может выходить за пределы диапазона температур.
[0005] Таким образом, методика, раскрытая в JP2009-100599A, позволяет снижать частоту несущей волны для удлинения периода работы, в течение которого может осуществляться операция переключающих элементов. Эта конфигурация снижает рабочую частоту переключающих элементов, тем самым, подавляя тепловыделение полупроводниковой микросхемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Вышеописанный способ управления электрической мощностью PWM требует ожидания в течение периода, эквивалентного периоду работы от момента измерения тока, подаваемого на двигатель, до начала период работы в течение которого переключающие элементы задействуются согласно измеренному току.
[0007] В данном случае, для использования методики, раскрытой в JP2009-100599A, поскольку это время задержки возрастает за счет удлинения периода работы, это приводит к проблеме возможного снижения точности управления вращением двигателя.
[0008] Настоящее изобретение сосредоточено на решении этой проблемы, и задача состоит в обеспечении способа управления электрической мощностью и устройства управления электрической мощностью, которые гарантируют повышение точности управления вращением двигателя.
[0009] Согласно одному варианту осуществления способа управления электрической мощностью этого изобретения, способ управления электрической мощностью, позволяющий управлять электрической мощностью, подаваемой на двигатель, причем способ управления электрической мощностью содержит: этап измерения тока, на котором измеряют ток, подаваемый в двигатель, в моменты времени, когда несущая волна достигает максимума или минимума; этап вычисления предписанного значения, на котором вычисляют предписанное значение заполнения согласно току, измеренному на этапе измерения тока, и необходимому крутящему моменту для двигателя; этап функционирования, на котором сравнивают несущую волну с предписанным значением заполнения по величине, по мере того, как несущая волна монотонно изменяется от одного из максимального значения и минимального значения до другого, причем на этапе функционирования осуществляется операция переключения переключающих элементов согласно результату сравнения; этап определения, на котором определяют, изменять ли период работы, в течение которого осуществляется этап функционирования, чтобы он был длиннее одного цикла несущей волны; первый этап подавления, на котором подавляют операцию переключения переключающих элементов в первом полуцикле несущей волны, начиная с начального момента времени периода работы после изменения, в течение которого несущая волна монотонно изменяется, когда на этапе определения определено изменение периода работы; этап сравнения изменения наклона несущей волны в течение промежуточного периода между первым полуциклом несущей волны и последним полуциклом несущей волны в течение периода работы после изменения для сравнения несущей волны с предписанным значением заполнения по величине, причем на этапе сравнения осуществляется операция переключения переключающих элементов согласно результату сравнения; и второй этап подавления, на котором подавляют операцию переключения переключающих элементов в последнем полуцикле несущей волны.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Фиг. 1 - схема конфигурации системы электропитания согласно первому варианту осуществления.
Фиг. 2 - пояснительная диаграмма процесса для изменения рабочей частоты переключающих элементов.
Фиг. 3 - пояснительная диаграмма процесса для изменения рабочей частоты переключающих элементов.
Фиг. 4A - диаграмма, демонстрирующая один пример процесса сравнения и сигнала PWM.
Фиг. 4B - диаграмма, демонстрирующая один пример процесса сравнения и сигнала PWM.
Фиг. 5 - блок-схема, демонстрирующая конфигурацию контроллера двигателя.
Фиг. 6 - пояснительная диаграмма процесса управления коэффициентом усиления.
Фиг. 7 - пояснительная диаграмма процесса для изменения рабочей частоты переключающих элементов согласно второму варианту осуществления.
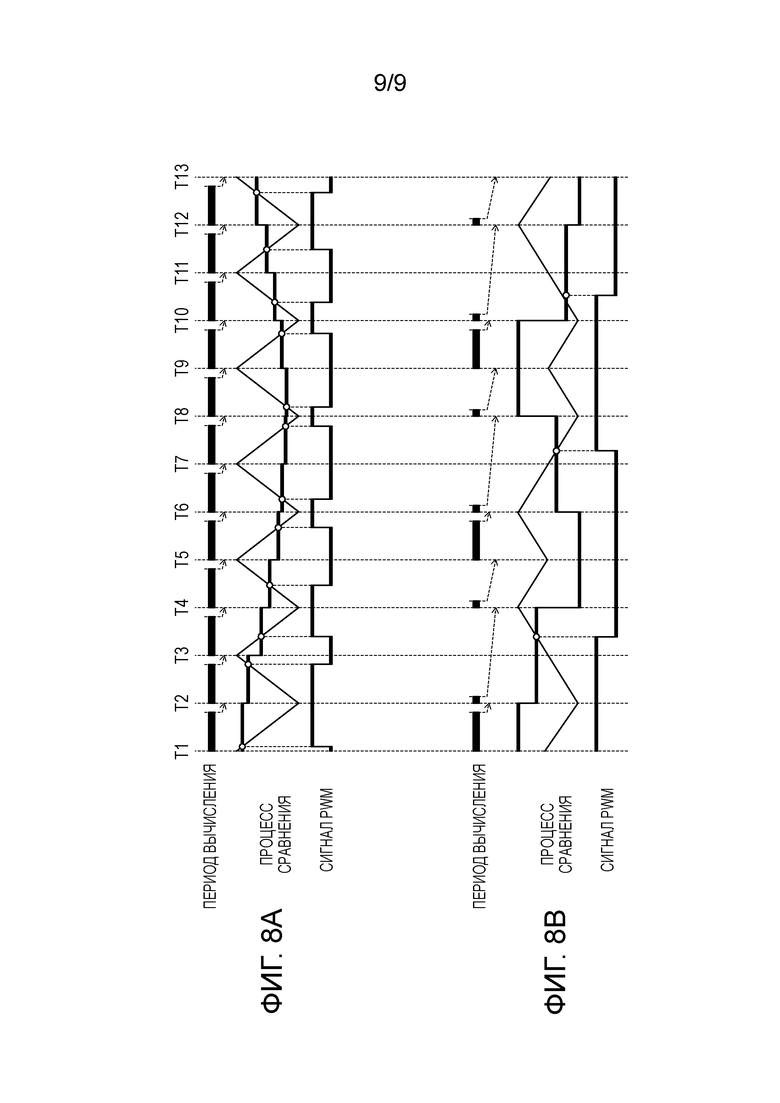
Фиг. 8 - пояснительная диаграмма процесса для изменения рабочей частоты переключающих элементов.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0011] Ниже описаны варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0012] Первый вариант осуществления
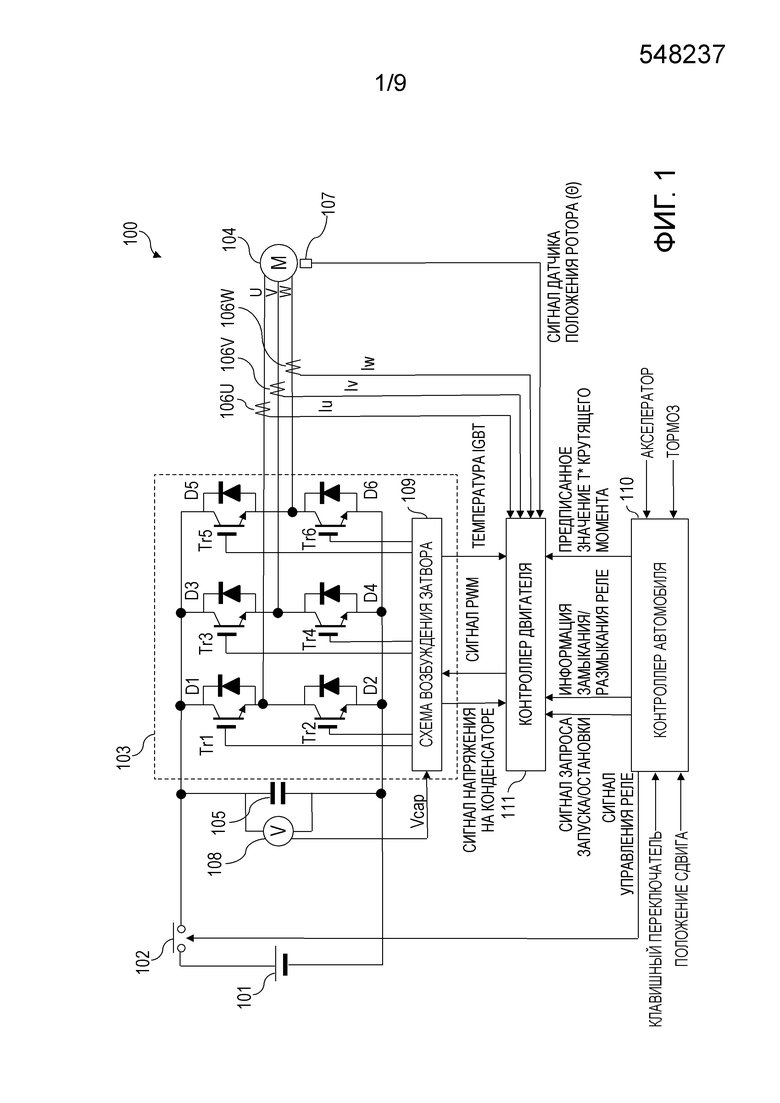
На фиг. 1 показана схема конфигурации системы электропитания согласно первому варианту осуществления.
[0013] Предполагается, что система 100 электропитания, представленная на фиг. 1 располагается в электрическом транспортном средстве. Эта система подает электрическую мощность из батареи 101 на двигатель 104 через реле 102 и инвертор 103.
[0014] Батарея 101 представляет собой вторичную батарею для вывода мощности постоянного тока.
[0015] Реле 102 управляет запуском или остановкой всей системы 100 электропитания.
[0016] Инвертор 103 включает в себя множество переключающих элементов (биполярных транзисторов с изолированным затвором, IGBT) Tr1 - Tr6 и выпрямительных устройств (диодов) D1 - D6. Выпрямительные устройства D1 - D6 подключены параллельно соответствующим переключающим элементам Tr1 - Tr6. Дополнительно, выпрямительные устройства D1 - D6 подключены так, что ток течет в направлении, противоположном направлению выпрямления переключающих элементов Tr1 - Tr6. Каждый из двух переключающих элементов подключен последовательно. Любой из трехфазных (UVW) блоков ввода двигателя 104 подключен между двумя последовательно соединенными переключающими элементами.
[0017] В частности, каждые из переключающих элементов Tr1 и Tr2, переключающих элементов Tr3 и Tr4 и переключающих элементов Tr5 и Tr6 соединены последовательно. Точка соединения переключающих элементов Tr1 и Tr2 подключена к блоку ввода для фазы U двигателя 104, точка соединения переключающих элементов Tr3 и Tr4 подключена к блоку ввода для фазы V двигателя 104, и точка соединения переключающих элементов Tr5 и Tr6 подключена к блоку ввода для фазы W двигателя 104. Операция переключения осуществляется на переключающих элементах Tr1 - Tr6, размещенных таким образом согласно сигналам PWM, выводимым из контроллера 111 двигателя для управления шириной импульса напряжения, подаваемого от батареи 101 на двигатель 104. Такое управление, в целом, именуется управлением электрической мощностью PWM. Следует отметить, что операция переключения переключающих элементов Tr описана ниже, просто рассматривая операцию переключения как операцию переключающих элементов Tr.
[0018] Следует отметить, что электрический потенциал на блоках ввода для соответствующих фаз двигателя 104, когда напряжение не подается на инвертор 103, предполагается равным нулю. Разность электрических потенциалов на конденсаторе 105 обозначается Vcap. Таким образом, предполагается, что электрический потенциал напряжения, подаваемого на блоки ввода для соответствующих фаз двигателя 104, принимает значение в диапазоне от "-Vcap/2" до "+Vcap/2."
[0019] Двигатель 104 представляет собой трехфазный двигатель переменного тока с постоянным магнитом, которое включает в себя постоянный магнит на роторе, и включает в себя блоки ввода для соответствующих трех фаз (фазы UVW). Двигатель 104 является источником движущей силы, который приводит в действие ведущие колеса электрического транспортного средства. Ведущие колеса электрического транспортного средства вращаются в соответствии с вращением двигателя 104.
[0020] Конденсатор 105 располагается между реле 102 и инвертором 103 и соединен параллельно с инвертором 103. Конденсатор 105 сглаживает мощность постоянного тока, поступающую от батареи 101 к инвертору 103.
[0021] Датчик 106 тока измеряет величины соответствующих токов, текущих от инвертора 103 к блокам ввода для соответствующих фаз двигателя 104. В этом варианте осуществления, три датчика тока, датчики 106U, 106V и 106W тока располагаются на линиях питания к блокам ввода для соответствующих фаз двигателя 104. Датчики 106U, 106V и 106W тока осуществлять вывод обратной связи для измеренных трехфазных переменных токов Iu, Iv и Iw соответствующих фаз на контроллер 111 двигателя.
[0022] Датчик 107 положения ротора представляет собой, например, датчик положения и кодер. Датчик 107 положения ротора располагается вблизи ротора двигателя 104 для измерения фазы θ ротора двигателя 104. Датчик 107 положения ротора выводит сигнал датчика положения ротора, указывающий измеренную фазу θ ротора, на контроллер 111 двигателя.
[0023] Датчик 108 напряжения подключен параллельно конденсатору 105. Датчик 108 напряжения измеряет напряжение Vcap на конденсаторе как разность электрических потенциалов между выводами конденсатора 105 и выводит напряжение Vcap на конденсаторе на схему 109 возбуждения затвора.
[0024] Схема 109 возбуждения затвора оперирует переключающими элементами Tr1 - Tr6 инвертора 103 согласно сигналам PWM, поступающим от контроллера 111 двигателя. Схема 109 возбуждения затвора измеряет температуры переключающих элементов Tr1 - Tr6 и определяет, нормально ли работают переключающие элементы Tr1 - Tr6. Схема 109 возбуждения затвора выводит сигналы IGBT, указывающие измеренные температуры, обнаруженные состояния или аналогичное состояние переключающих элементов Tr1 - Tr6, на контроллер 111 двигателя. Схема 109 возбуждения затвора выводит сигнал напряжения на конденсаторе, указывающий напряжение Vcap на конденсаторе, измеренное датчиком 108 напряжения, на контроллер 111 двигателя.
[0025] Контроллер 110 автомобиля вычисляет предписанное значение T* крутящего момента, указывающее необходимый крутящий момент как крутящий момент, необходимый для двигателя 104, и выводит вычисленное предписанное значение T* крутящего момента на контроллер 111 двигателя.
[0026] Контроллер 111 двигателя выводит сигналы широтно-импульсной модуляции (PWM) на соответствующие переключающие элементы Tr1 - Tr6 инвертора 103 для управления шириной импульса подаваемого напряжения на двигатель 104. В частности, контроллер 111 двигателя вычисляет предписанное значение напряжения на основании трехфазного переменного тока Iu, Iv и Iw, выводимого из датчика 106 тока, фазы θ ротора, выводимой из датчика 107 положения ротора, и предписанного значения T* крутящего момента, выводимого из контроллера 110 автомобиля. Затем контроллер 111 двигателя использует предписанное значение напряжения и напряжение Vcap на конденсаторе, выводимое из датчика 108 напряжения, для вычисления предписанного значения заполнения. Затем контроллер 111 двигателя сравнивает предписанное значение заполнения с несущей волной и генерирует сигналы PWM согласно результату сравнения. Затем контроллер 111 двигателя выводит сгенерированные сигналы PWM на схему 109 возбуждения затвора. Схема 109 возбуждения затвора оперирует соответствующими переключающими элементами Tr1 - Tr6 инвертора 103 на основании соответствующих входных сигналов PWM. Это позволяет управлять шириной импульса подаваемого напряжения на двигатель 104, позволяя двигателю 104 развивать крутящий момент с предписанным значением T* крутящего момента.
[0027] Предполагается, что, в системе 100 электропитания, устройство управления электрической мощностью состоит, например, из инвертора 103, датчика 106 тока и контроллера 111 двигателя. Контроллер 111 двигателя выполнен в виде полупроводниковой микросхемы.
[0028] Ниже описан способ изменения рабочей частоты переключающих элементов Tr контроллером 111 двигателя.
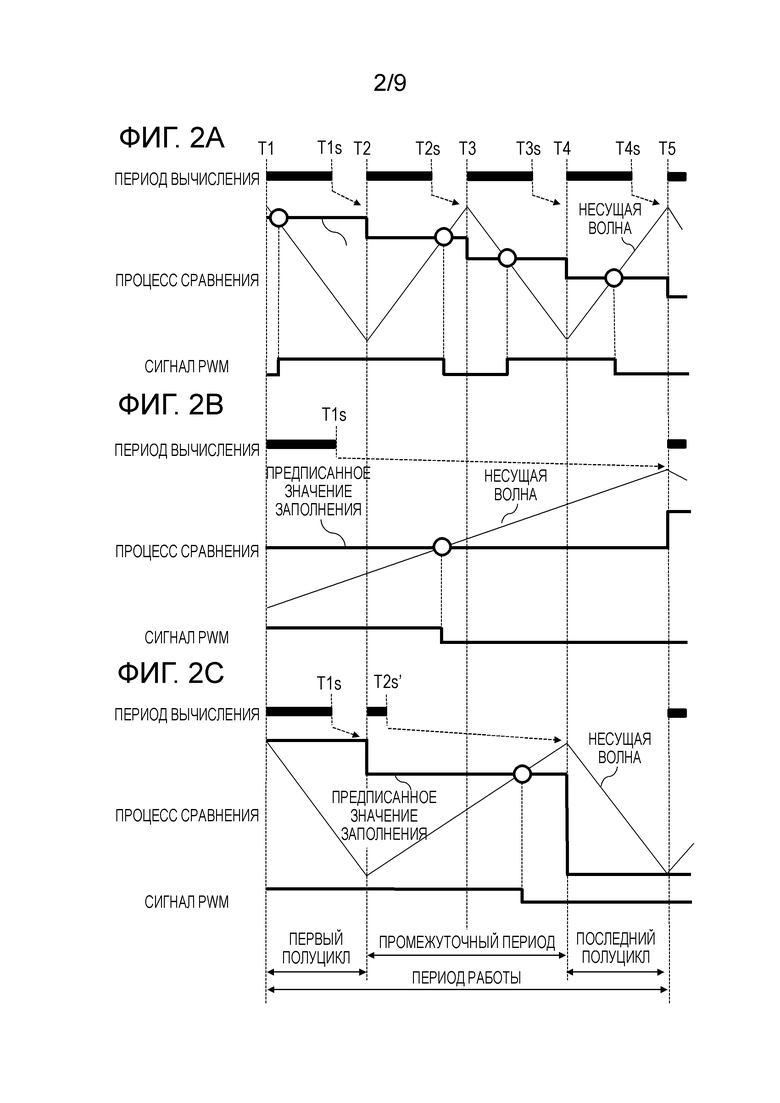
[0029] На фиг. 2 показана пояснительная диаграмма процесса для изменения рабочей частоты переключающих элементов. Фиг. 2(a) демонстрирует процесс генерации сигнала PWM, когда рабочая частота не изменяется. Фиг. 2(b) демонстрирует процесс генерации сигнала PWM, когда рабочая частота изменяется путем изменения частоты несущей волны традиционным способом. Фиг. 2(c) демонстрирует процесс генерации сигнала PWM в случае, когда рабочая частота изменяется путем изменения части наклона несущей волны согласно настоящему изобретению.
[0030] На каждой из фиг. 2(a) - 2(c) показаны период вычисления, процесс сравнения и сигнал PWM. Период вычисления означает период, в течение которого контроллер 111 двигателя осуществляет процесс вычисления предписанного значения заполнения. В процессе сравнения несущая волна сравнивается с предписанным значением заполнения. Сигнал PWM указывает высокий уровень или низкий уровень сигнала. Переключающие элементы Tr задействуются согласно этому уровню сигнала.
[0031] На каждой из фиг. 2(a) - 2(c) показаны стрелки между периодом вычисления и процессом сравнения. Эти стрелки указывают задержку от момента времени завершения вычисления предписанного значения заполнения до момента времени начала сравнения между вычисленным предписанным значением заполнения и несущей волной.
[0032] Следует отметить, что период, в течение которого несущая волна неизменной частоты монотонно возрастает или убывает, то есть период, в течение которого происходит изменение от минимального значения до максимального значения (от впадины до пика) или от максимального значения до минимального значения (от пика до впадины), эквивалентен половине цикла несущей волны. Таким образом, период, в течение которого несущая волна неизменной частоты монотонно возрастает или убывает именуется полуциклом несущей волны. Период, в течение которого предписанное значение заполнения согласно определенному измеренному току сравнивается с несущей волной, и переключающие элементы Tr задействуются согласно результатам сравнения, именуется периодом работы. Таким образом, переключающие элементы Tr задействуются в течение каждого периода работы.
[0033] Опишем сначала, со ссылкой на фиг. 2(a), процесс генерации сигнала PWM, когда рабочая частота переключающих элементов Tr не изменяется.
[0034] Время T1 это момент времени, когда несущая волна достигает максимума. В это время T1 датчик 106 тока измеряет ток. Контроллер 111 двигателя использует этот измеренный ток для запуска вычисления предписанного значения заполнения, используемого во времена T2 и T3. Следует отметить, что, со времен T1 и T2, раннее вычисленное предписанное значение заполнения сравнивается с несущей волной по величине, и сигнал PWM генерируется согласно результату сравнения.
[0035] В частности, в случае, когда предписанное значение заполнения больше, чем несущая волна, генерируется сигнал PWM для включения переключающих элементов Tr. Если же предписанное значение заполнения меньше, чем несущая волна, генерируется сигнал PWM для отключения переключающих элементов Tr. Следует отметить, что, кружки обозначают позиции, где предписанное значение заполнения пересекается с несущей волной и переключающие элементы Tr задействуются в моменты времени, обозначенные кружками.
[0036] Во время T1s контроллер 111 двигателя завершает процесс вычисления предписанного значения заполнения.
[0037] Время T2 это момент времени, когда несущая волна достигает минимума. В это время T2 начинается сравнение между предписанным значением заполнения, вычисленным во время T1s, и несущей волной.
[0038] Вышеописанные операции также повторяются после времени T2.
[0039] Соответственно, как показано на фиг. 2(a), когда рабочая частота не изменяется, сравнение между предписанным значением заполнения согласно измеренному току и несущей волной и операция переключающих элементов Tr осуществляются в каждом полуцикле несущей волны. Таким образом, период работы эквивалентен полуциклу несущей волны.
[0040] Ниже описан процесс генерации сигнала PWM в случае, когда рабочая частота несущей волны изменяется, путем изменения частоты несущей волны традиционным способом со ссылкой на фиг. 2(b). По сравнению с несущей волной, представленной на фиг. 2(a), цикл несущей волны на этой диаграмме увеличивается в четыре раза, то есть частота уменьшается в 4 раза.
[0041] Время T1 это момент времени, когда несущая волна достигает максимума. С этого времени T1 начинается процесс сравнения между предписанным значением заполнения и несущей волной. Контроллер 111 двигателя использует этот измеренный ток для запуска вычисления предписанного значения заполнения, используемого во время T5 и после него. Следует отметить, что между временами T1 и T5 раннее вычисленное предписанное значение заполнения сравнивается с несущей волной по величине, и сигнал PWM генерируется согласно результату сравнения.
[0042] Контроллер 111 двигателя завершает процесс вычисления предписанного значения заполнения во время T1s.
[0043] Время T5 это момент времени, когда несущая волна достигает максимума. В это время T5 начинается процесс сравнения между предписанным значением заполнения, вычисленным во время T1s, и несущей волной.
[0044] Вышеописанные операции также повторяются после времени T5.
[0045] Соответственно, как показано на фиг. 2(b), в случае, когда частота несущей волны изменяется, предписанное значение заполнения согласно измеренному току сравнивается с несущей волной и переключающие элементы Tr задействуются через каждые четыре полуцикла несущей волны до изменения частоты. Соответственно, период работы эквивалентен периоду в четыре полуцикла несущей волны до изменения. Таким образом, по сравнению со случаем представленным на фиг. 2(a), период работы увеличивается в четыре раза; таким образом, рабочая частота может снижаться в 4 раза.
[0046] Ниже описан процесс генерации сигнала PWM, который изменяет рабочую частоту путем изменения части наклона несущей волны согласно настоящему изобретению со ссылкой на фиг. 2(c). По сравнению с несущей волной, представленной на фиг. 2(a), часть (времена T2 - T4) наклона несущей волны на этой диаграмме изменяется. На этой диаграмме, предполагается, что период работы переключающих элементов Tr, аналогичный периоду работы, представленному на фиг. 2(b), увеличивается в четыре раза по сравнению с периодом работы, представленным на фиг. 2(a). Следует отметить, что, когда предписанное значение заполнения не пересекается с несущей волной, предполагается, что переключающие элементы Tr не задействуются.
[0047] Период полуцикла несущей волны, начиная с начального момента времени измененного периода работы, в течение которого несущая волна монотонно изменяется, именуется первым полуциклом. При этом, период полуцикла несущей волны, заканчивающийся в конечный момент времени периода работы, именуется последним полуциклом. Период между первым полуциклом и последним полуциклом в течение периода работы именуется промежуточным периодом.
[0048] Время T1 это момент времени, когда несущая волна достигает максимума, и начинается первый полуцикл. Датчик 106 тока измеряет ток в это время T1. Контроллер 111 двигателя использует этот измеренный ток для запуска вычисления предписанного значения заполнения между временами T2 и T4. Следует отметить, что процесс сравнения между предписанным значением заполнения и несущей волной начинается со времени T1; однако, поскольку предписанное значение заполнения всегда больше или равно несущей волне во времена T1 и T2, операция переключения переключающих элементов не осуществляется.
[0049] Во время T1s контроллер 111 двигателя завершает процесс вычисления предписанного значения заполнения.
[0050] Время T2 это момент времени, когда несущая волна достигает минимума, и промежуточный период начинается в конце первого полуцикла. В это время T2 наклон несущей волны изменяется таким образом, что несущая волна монотонно возрастает от минимального значения до максимального значения в течение промежуточного периода. Начинается процесс сравнения между предписанным значением заполнения, вычисленным во время T1s, и несущей волной с изменяющимся наклоном.
[0051] Одновременно, согласно периоду вычисления на чертеже, во время T2, контроллер 111 двигателя начинает процесс определения предписанного значения заполнения между временами T4 и T5. Следует отметить, что во время T2, предписанное значение заполнения не вычисляется с использованием измеренного тока, но предписанное значение заполнения определяется согласно тому, является ли наклон несущей волны положительным или отрицательным в течение промежуточного периода. В частности, поскольку наклон несущей волны в течение промежуточного периода положителен, минимальное значение (низкая сторона) несущей волны определяется как предписанное значение заполнения между временами T4 и T5. Следует отметить, что когда наклон несущей волны в течение промежуточного периода отрицателен, максимальное значение несущей волны (высокая сторона) определяется как предписанное значение заполнения.
[0052] Во время T2s' контроллер 111 двигателя завершает процесс определения предписанного значения заполнения и определяет минимальное значение несущей волны как предписанное значение заполнения. Следует отметить, что, период, в течение которого предписанное значение заполнения определяется согласно градиенту несущей волны (времена T2 - T2'), короче периода, в течение которого предписанное значение заполнения вычисляется с использованием измеренного тока (времена T1 - T1').
[0053] Время T4 это момент времени, когда несущая волна достигает максимума, и последний полуцикл начинается в конце промежуточного периода. Во время T4, контроллер 111 двигателя начинает процесс сравнения между предписанным значением заполнения, определенным во время T2s', и несущей волной.
[0054] Время T5 это момент времени, когда несущая волна достигает минимума, и первый полуцикл в следующем периоде работы начинается в конце последнего полуцикла. В это время T5 предписанное значение заполнения не изменяется. Одновременно, во время T5, датчик 106 тока измеряет ток, и контроллер 111 двигателя начинает вычисление предписанного значения заполнения, используемого для операции переключающих элементов Tr в следующем периоде работы на основании измеренного тока.
[0055] Вышеописанные операции также повторяются после времени T5. Следует отметить, что в этом объяснении предписанное значение заполнения не устанавливается во время T5. Однако, например, в силу ограничений, налагаемых на процесс полупроводниковой микросхемы, возможен случай, когда любое значение необходимо устанавливать равным предписанному значению заполнения в момент времени, когда несущая волна достигает максимума или минимума. В таком случае, значение, идентичное значению во время T2, устанавливается равным предписанному значению заполнения во время T3, и значение, идентичное значению во время T4, устанавливается равным предписанному значению заполнения во время T5.
[0056] Соответственно, конфигурация, показанная на фиг. 2(c), осуществляет сравнение между предписанным значением заполнения согласно измеренному току и несущей волной и оперирует переключающими элементами Tr в течение каждого периода работы (времена T1 - T5). Следует отметить, что этот период работы эквивалентен периоду в четыре полуцикла несущей волны. Таким образом, по сравнению со случаем представленным на фиг. 2(a), поскольку период работы увеличивается в четыре раза, рабочая частота может снижаться в 4 раза.
[0057] Ниже приведена сводка операций, когда часть наклона несущей волны изменяется, как показано на фиг. 2(c). Период работы, когда осуществляются сравнение между предписанным значением заполнения согласно измеренному току и несущей волной и операция переключающих элементов Tr, начинается с момента времени измерения тока (времени T1). Следует отметить, что полуцикл начиная с начального момента времени периода работы, в течение которого несущая волна монотонно изменяется (времена T1 и T2) является первым полуциклом. При этом, полуцикл, заканчивающийся в конечный момент времени периода работы, в течение которого заканчивается монотонное изменение несущей волны (времена T4 - T5), является последним полуциклом. Период между первым полуциклом и последним полуциклом в течение периода работы (времена T2 - T4) является промежуточным периодом. Следует отметить, что, в течение промежуточного периода, несущая волна монотонно изменяется от одного из минимального значения и максимального значения до другого.
[0058] В течение промежуточного периода (времена T2 - T4), операция переключения осуществляется на переключающих элементах в моменты времени, когда количественное соотношение между несущей волной и предписанным значением заполнения согласно измеренному току обращается. При этом, в первом полуцикле (времена T1 и T2) и последнем полуцикле (времена T4 - T5), предписанное значение заполнения устанавливается равным высокой стороне или низкой стороне, и количественное соотношение между предписанным значением заполнения и несущей волной не изменяется; таким образом, операция переключения не осуществляется на переключающих элементах. Соответственно, в течение периода работы после изменения (времена T1 - T5), операция переключения осуществляется на переключающих элементах Tr только в течение промежуточного периода (времена T2 - T4). Таким образом, поскольку операция переключения осуществляется на переключающих элементах Tr в течение каждого периода работы после изменения, рабочая частота переключающих элементов Tr может снижаться.
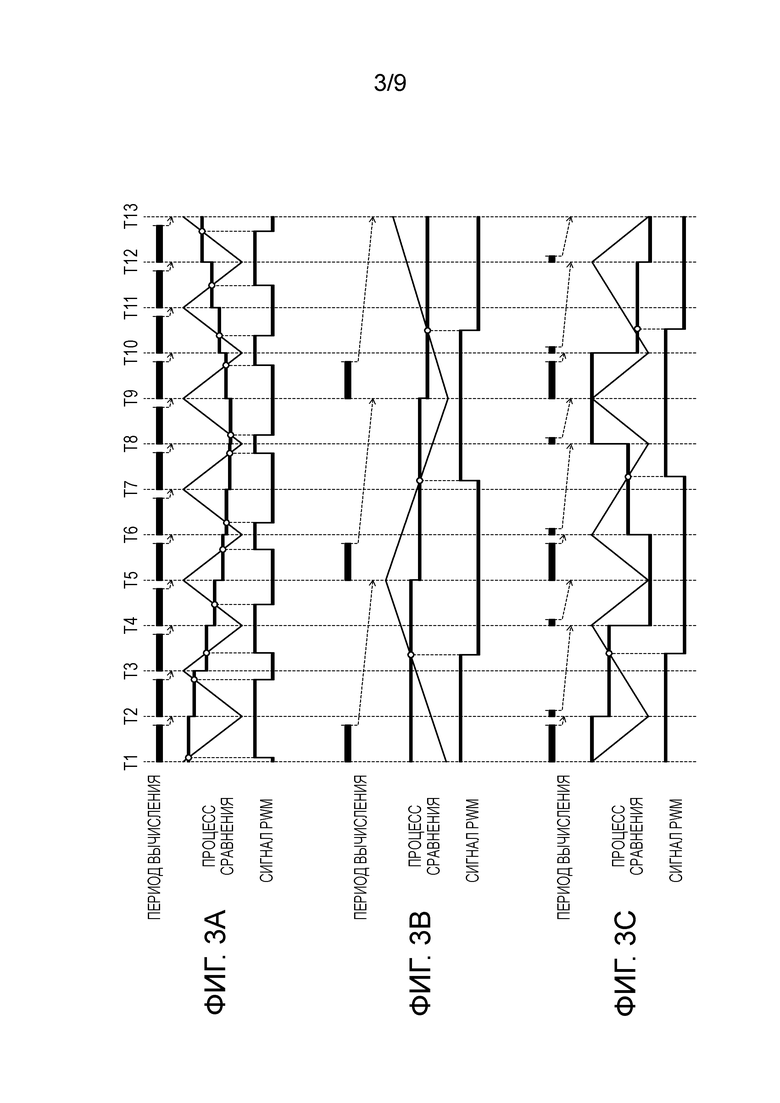
[0059] На фиг. 3 показана пояснительная диаграмма процесса изменения рабочей частоты переключающих элементов. Аналогично фиг. 2, в фиг. 3(a) на фиг. 3 показана пояснительная диаграмма процесса генерации сигнала PWM, когда рабочая частота не изменяется. На фиг. 3(b) показана пояснительная диаграмма процесса генерации сигнала PWM, когда частота несущей волны изменяется традиционным способом. На фиг. 3(c) показана пояснительная диаграмма процесса генерации сигнала PWM, когда часть наклона несущей волны изменяется согласно настоящему изобретению. Эта диаграмма демонстрирует процесс генерации сигнала PWM в течение периода, более длинного, чем период на фиг. 2.
[0060] Для изменения частоты, представленного на фиг. 3(b), и для изменения части наклона несущей волны, представленного на фиг. 3(c), переключающие элементы Tr задействуются с периодичностью, в четыре раза превышающей полуцикл несущей волны до изменения.
[0061] Когда часть наклона несущей волны изменяется, в случае, когда наклон несущей волны в течение промежуточного периода в первом полуцикле положителен, предписанное значение заполнения достигает максимального значения несущей волны и в случае, когда наклон отрицателен, предписанное значение заполнения достигает минимального значения несущей волны. При этом, в случае, когда наклон несущей волны в течение промежуточного периода в последнем полуцикле положителен, предписанное значение заполнения достигает минимального значения несущей волны и в случае, когда наклон отрицателен, предписанное значение заполнения достигает максимального значения несущей волны. Таким образом, ниже конкретно описаны операции установления предписанного значения заполнения со ссылкой на фиг. 3(c).
[0062] Со ссылкой на период работы со времен T1 - T5, поскольку наклон несущей волны в течение промежуточного периода (времена T2 - T) положителен, минимальное значение несущей волны устанавливается равным предписанному значению заполнения в последнем полуцикле (времена T4 и T5). Со ссылкой на следующий период работы (времена T5 - T9), предписанное значение заполнения остается минимальным значением несущей волны в первом полуцикле (времена T5 и T6) и не изменяется. Это значение соответствует отрицательному наклону несущей волны в течение промежуточного периода (времена T6 - T8).
[0063] Соответственно, контроллер 111 двигателя устанавливает одно из максимального значения и минимального значения несущей волны согласно наклону в течение промежуточного периода равным предписанному значению заполнения в конечный момент времени промежуточного периода в течение определенного периода работы. Эта конфигурация устанавливает предписанное значение заполнения равным значению согласно наклону несущей волны в течение промежуточного периода в последнем полуцикле в течение определенного периода работы. Это предписанное значение заполнения также используется без изменения в первом полуцикле в следующем периоде работы. Эта конфигурация устанавливает предписанное значение заполнения в первом полуцикле в следующем периоде работы равным значению согласно наклону несущей волны в течение промежуточного периода.
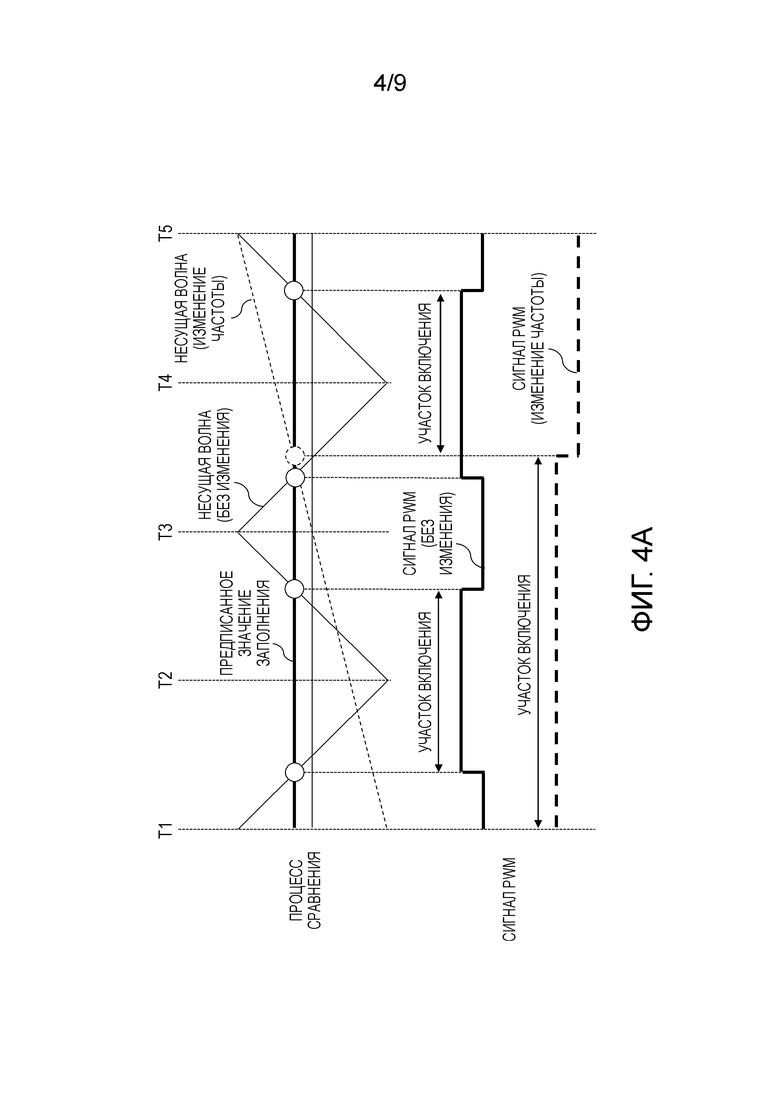
[0064] Ниже описано соотношение между предписанным значением заполнения и коэффициентом заполнения, когда рабочая частота не изменяется, как показано на фиг. 2(a) и фиг. 3(a), и когда частота несущей волны изменяется, как показано на фиг. 2(b) и фиг. 3(b). Следует отметить, что коэффициент заполнения означает отношение участка включения сигнала PWM к циклу работы переключающих элементов Tr.
[0065] На фиг. 4A показана диаграмма, демонстрирующая один пример процесса сравнения и сигнала PWM.
[0066] В процессе сравнения на этой диаграмме, несущая волна с неизменной рабочей частотой указана сплошной линией. Несущая волна с переменной частотой указана пунктирной линией. Следует отметить, что предписанные значения заполнения идентичны в обоих случаях неизменной рабочей частоты и изменяющейся частоты и указаны сплошной линией.
[0067] В сигнале PWM на этой диаграмме, сигнал PWM, когда рабочая частота не изменяется, указан толстой сплошной линией. Сигнал PWM, когда частота изменяется, указан толстой пунктирной линией.
[0068] Коэффициент заполнения, когда цикл работы не изменяется, равен итоговой сумме участка включения сигнала PWM, который равен коэффициенту заполнения, когда частота изменяется. Дело в том, что, даже если градиент несущей волны отличается, при условии, что несущая волна неоднократно изменяется между максимальным значением и минимальным значением с постоянным циклом, итоговая сумма участка, где предписанное значение заполнения становится большим, чем несущая волна, оказывается равным коэффициенту заполнения.
[0069] Соответственно, для изменения частоты, как показано на фиг. 2(b) и фиг. 3(b), использование вычисленное предписанного значения заполнения самого по себе позволяет устанавливать желаемое значение коэффициента заполнения.
[0070] Ниже описано соотношение между предписанным значением заполнения и коэффициентом заполнения, когда частота изменяется, как показано на фиг. 2(b) и фиг. 3(b), и часть наклона несущей волны изменяется, как показано на фиг. 2(c) и фиг. 3(c).
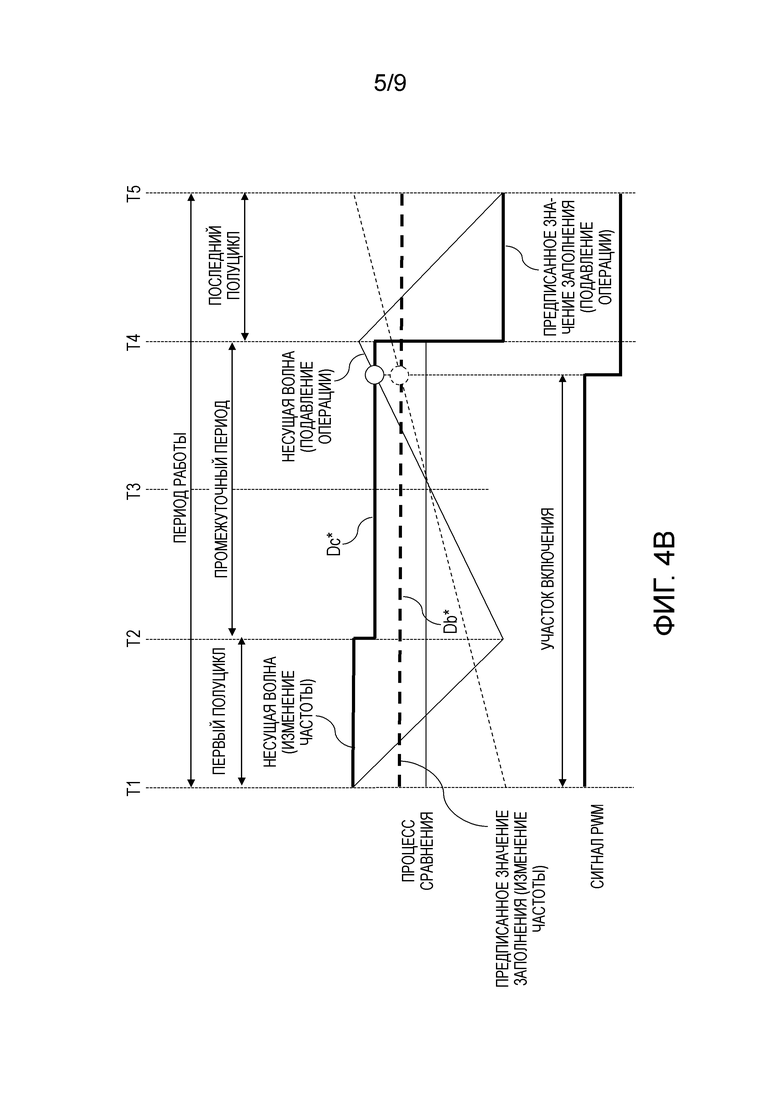
[0071] На фиг. 4B показана диаграмма, демонстрирующая другой пример процесса сравнения и сигнала PWM.
[0072] В процессе сравнения на этой диаграмме, в случае изменения частоты, предписанное значение заполнения указано толстой пунктирной линией, и несущая волна указана пунктирной линией. Следует отметить, что это предписанное значение заполнения равно Db*. Эта диаграмма демонстрирует, в случае подавления операции переключающих элементов, предписанное значение заполнения указано толстой сплошной линией, и несущая волна указана сплошной линией. Следует отметить, что предписанное значение заполнения во времена T2 - T4 (промежуточный период) среди предписанных значений заполнения предполагается равным Dc*.
[0073] В сигнале PWM на этой диаграмме, сигналы PWM, когда рабочая частота не изменяется, и когда частота изменяется, совпадают, что указано сплошной линией.
[0074] В данном случае, для выравнивания коэффициента заполнения, когда частота изменяется и когда операция переключающих элементов Tr подавляется, временной режим работы переключающих элементов Tr необходимо согласовывать. Таким образом, предписанное значение Dc* заполнения должно иметь величину, вдвое большую предписанного значения Db* заполнения. Дело в том, что, для подавления операции переключающих элементов, по сравнению со случаем изменения частоты, наклон несущей волны в течение промежуточного периода вдвое больше. Следует отметить, что коэффициент этого наклона можно получить делением периода работы на промежуточный период.
[0075] Соответственно, для подавления операции переключающих элементов, корректировка вычисленного предписанного значения заполнения до значения, полученного удвоением значения, полученного делением периода работы на период сравнения, позволяет устанавливать желаемое значение коэффициента заполнения.
[0076] Следует отметить, что выражение отношение периода работы к полуциклу несущей волны в качестве коэффициента K изменения (K=4 на фиг. 2(b) и фиг. 2(c), фиг. 3(b) и фиг. 3(c), и фиг. 4A и фиг. 4B), период работы после изменения составляет "K-2" полуцикла несущей волны до изменения. Таким образом, коэффициент коррекции предписанного значения заполнения равен "K/(K-2)".
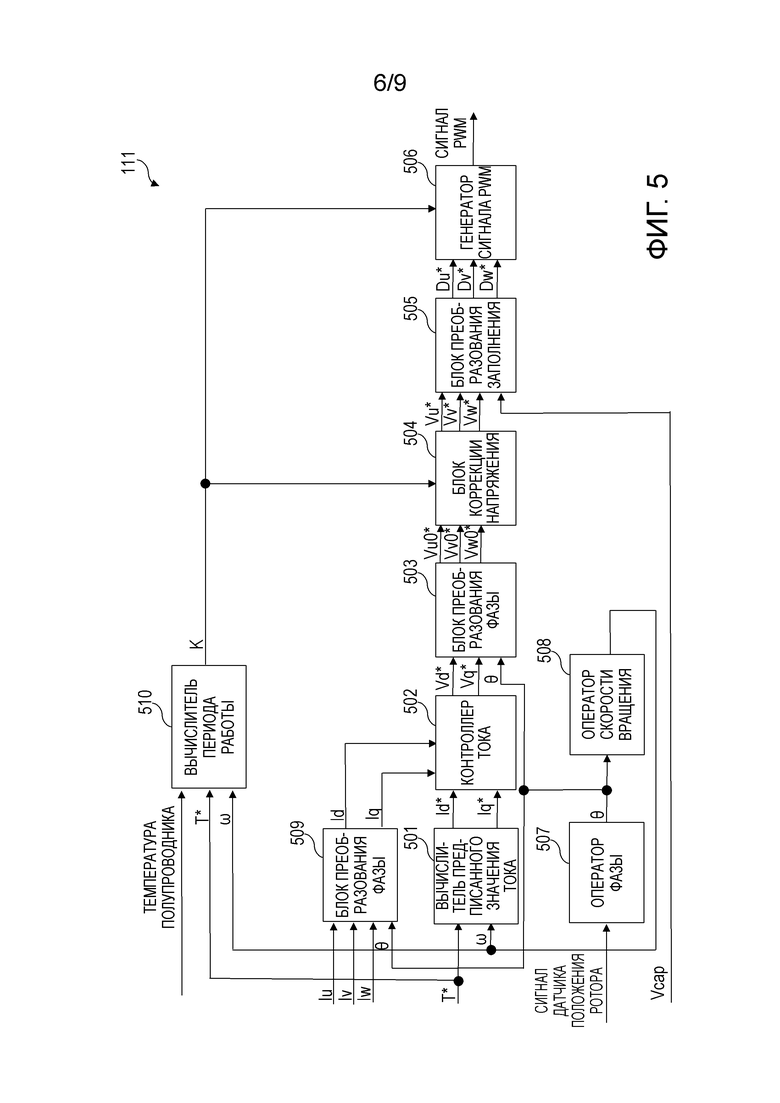
[0077] Ниже, со ссылкой на фиг. 5, описана конфигурация контроллера 111 двигателя, показанного на фиг. 1.
[0078] На фиг. 5 показана блок-схема, демонстрирующая конфигурацию контроллера 111 двигателя.
[0079] Вычислитель 501 предписанного значения тока вычисляет предписанное значение Id* тока по оси d и предписанное значение Iq* тока по оси q на основании предписанного значения T* крутящего момента, которое вычисляется контроллером 110 автомобиля, показанным на фиг. 1, и скорости ω вращения двигателя 104.
[0080] Следует отметить, что скорость ω вращения двигателя 104 получается следующим образом.
[0081] Оператор 507 фазы вычисляет фазу θ ротора на основании сигнала датчика положения ротора, выводимого из датчика 107 положения ротора, показанного на фиг. 1.
[0082] Оператор 508 скорости вращения осуществляет дифференциальную операцию на фазе θ ротора, вычисленной оператором 507 фазы, чтобы оперировать скоростью вращения (электрической угловой скоростью) ω.
[0083] На контроллер 502 тока поступают предписанное значение Id* тока по оси d и предписанное значение Iq* тока по оси q, которые выводятся из вычислителя 501 предписанного значения тока, и ток Id по оси d и ток Iq по оси q, которые являются измеренным значением тока, текущего из блока 509 преобразования фазы на двигатель 104. Контроллер 502 тока вычисляет предписанное значение Vd* напряжения по оси d и предписанное значение Vq* напряжения по оси q на основании этих входных значений. В частности, контроллер 502 тока получает предписанное значение Vd* напряжения по оси d для устранения расхождения между предписанным значением Id* тока по оси d и током Id по оси d. Контроллер 502 тока получает предписанное значение Vq* напряжения по оси q для устранения расхождения между предписанным значением Iq* тока по оси q и током Iq по оси q.
[0084] При этом, когда предписанное значение напряжения сильно изменяется, возможен случай, когда требуется время от изменения предписанного значения напряжения до целевого значения до фактического достижения напряжения, подаваемого на двигатель 104, целевого значения. Таким образом, состояние между изменением предписанного значения и отражением фактического значения именуется переходным состоянием. Таким образом, осуществление процесса управления коэффициентом усиления при предписанном значении напряжения, как описано ниже, в моменты времени сильного изменения предписанного значения напряжения обеспечивает сокращение периода в переходном состоянии.
[0085] Следует отметить, что блок 509 преобразования фазы вычисляет ток Id по оси d и ток Iq по оси q на основании трехфазных переменных токов Iu, Iv и Iw, измеренных датчиками 106U, 106V и 106W тока, показанными на фиг. 1, и фазы θ ротора, вычисленной оператором 507 фазы.
[0086] Следует отметить, что момент времени, когда датчик 106 тока измеряет величину несущей волны, и момент времени, когда ток Id по оси d и ток Iq по оси q, выводимые из блока 509 преобразования фазы, изменяются синхронизируются. Например, когда датчик 106 тока измеряет ток, текущий в двигатель 104, в момент времени, когда несущая волна имеет максимальную величину, ток Id по оси d и ток Iq по оси q, выводимые из блока 509 преобразования фазы, изменяются синхронно с моментом времени, когда величина несущей волны достигает максимума.
[0087] Блок 503 преобразования фазы использует предписанное значение Vd* напряжения по оси d и предписанное значение Vq* напряжения по оси q и фазу θ ротора двигателя 104, выводимую из оператора 507 фазы, для получения предписанных значений Vu0*, Vv0* и Vw0* напряжения трехфазного переменного тока. Блок 503 преобразования фазы выводит полученные предписанные значения Vu0*, Vv0* и Vw0* напряжения трехфазного переменного тока на блок 504 коррекции напряжения.
[0088] Как описано выше, электрический потенциал, подаваемый на блоки ввода для соответствующих фаз двигателя 104, находится в диапазоне от "-Vcap/2" до "+Vcap/2". Соответственно, предписанные значения Vu*, Vv* и Vw* напряжения трехфазного переменного тока оказываются в диапазоне от "-Vcap/2" до "+Vcap/2".
[0089] Из блока 503 преобразования фазы и вычислителя 510 периода работы предписанные значения Vu0*, Vv0* и Vw0* напряжения трехфазного переменного тока и коэффициент K изменения цикла переключение поступают на блок 504 коррекции напряжения, соответственно. Как описано со ссылкой на фиг. 4B, блок 504 коррекции напряжения умножает соответствующие предписанные значения Vu0*, Vv0* и Vw0* напряжения трехфазного переменного тока на "K/(K-2)" для установления скорректированных предписанных значений Vu*, Vv* и Vw* напряжения.
[0090] В данном случае, как описано выше, существует состояние, именуемое переходным состоянием между изменением предписанного значения напряжения и установлением значения подаваемого напряжения. Благодаря коррекции, осуществляемой блоком 504 коррекции напряжения, временной режим работы переключающих элементов Tr устанавливается на желаемый временной режим, что позволяет повысить производительность управления током, в том числе, в переходном состоянии.
[0091] Следует отметить, что коррекция с помощью блока 504 коррекции напряжения может не осуществляться. В таком случае, производительность управления током в переходном состоянии снижается. Однако, поскольку управление с обратной связью осуществляется при условии получения предписанного значения заполнения с использованием измеренного тока, производительность управления током в стабильном состоянии, отличном от переходного состояния, а именно, когда измеренный ток становится равным предписанному значению тока, почти такая же, как в случае осуществления коррекции блоком 504 коррекции напряжения.
[0092] Ниже описан способ вычисления коэффициента K изменения вычислителем 510 периода работы.
[0093] В вычислитель 510 периода работы вводятся температура полупроводника контроллера 111 двигателя, скорость ω вращения двигателя 104 и предписанное значение T* крутящего момента двигателя 104. На основании этих вводов вычислитель 510 периода работы определяет, изменяется ли период работы, и коэффициент K периода работы после изменения. Следует отметить, что, когда период работы изменяется, коэффициенту K изменения присваивается значение, большее 2.
[0094] Чем больше коэффициент K изменения, тем меньше рабочая частота переключающих элементов Tr; таким образом, тепловыделение полупроводниковой микросхемы может уменьшаться. Таким образом, чем выше температура полупроводниковой микросхемы тем большее значение присваивается коэффициенту K изменения. Чем ближе к 0 абсолютное значение скорости ω вращения, тем меньше тепловое излучение двигателя 104; таким образом, устанавливается большой коэффициент K изменения. Чем больше абсолютное значение предписанного значения T* крутящего момента, тем большее значение присваивается коэффициенту K изменения.
[0095] Вычислитель 510 периода работы выводит коэффициент K изменения на блок 504 коррекции напряжения и генератор 506 сигнала PWM.
[0096] Блок 505 преобразования заполнения использует следующую формулу (1) для генерации предписанных значений Du*, Dv* и Dw* заполнения на основании скорректированных предписанных значений Vu*, Vv* и Vw* напряжения и напряжения Vcap на конденсаторе конденсатора 105, показанного на фиг. 1, и выводит предписанные значения Du*, Dv* и Dw* заполнения на генератор 506 сигнала PWM.
[0097] Формула 1

[0098] На генератор 506 сигнала PWM поступают предписанные значения Du*, Dv* и Dw* заполнения и коэффициент K изменения.
[0099] Когда период работы должен изменяться, генератор 506 сигнала PWM осуществляет процесс, как объяснено на фиг. 2(c), на предписанных значениях Du*, Dv* и Dw* заполнения. В частности, в первом полуцикле и последнем полуцикле, предписанное значение заполнения устанавливается равным высокой стороне или низкой стороне согласно градиенту несущей волны в течение промежуточного периода. Следует отметить, что блок 504 коррекции напряжения корректирует предписанное значение заполнения до коэффициента K изменения в течение промежуточного периода. Генератор 506 сигнала PWM сравнивает несущую волну с предписанными значениями Du*, Dv* и Dw* заполнения для генерации сигнала PWM.
[0100] При этом, когда период работы не нужно изменять, генератор 506 сигнала PWM не осуществляет процесс, как объяснено на фиг. 2(c), на предписанных значениях Du*, Dv* и Dw* заполнения, но сравнивает несущую волну с предписанными значениями Du*, Dv* и Dw* заполнения для генерации сигнала PWM. В этом случае, блок 504 коррекции напряжения не корректирует предписанное значение заполнения в течение промежуточного периода.
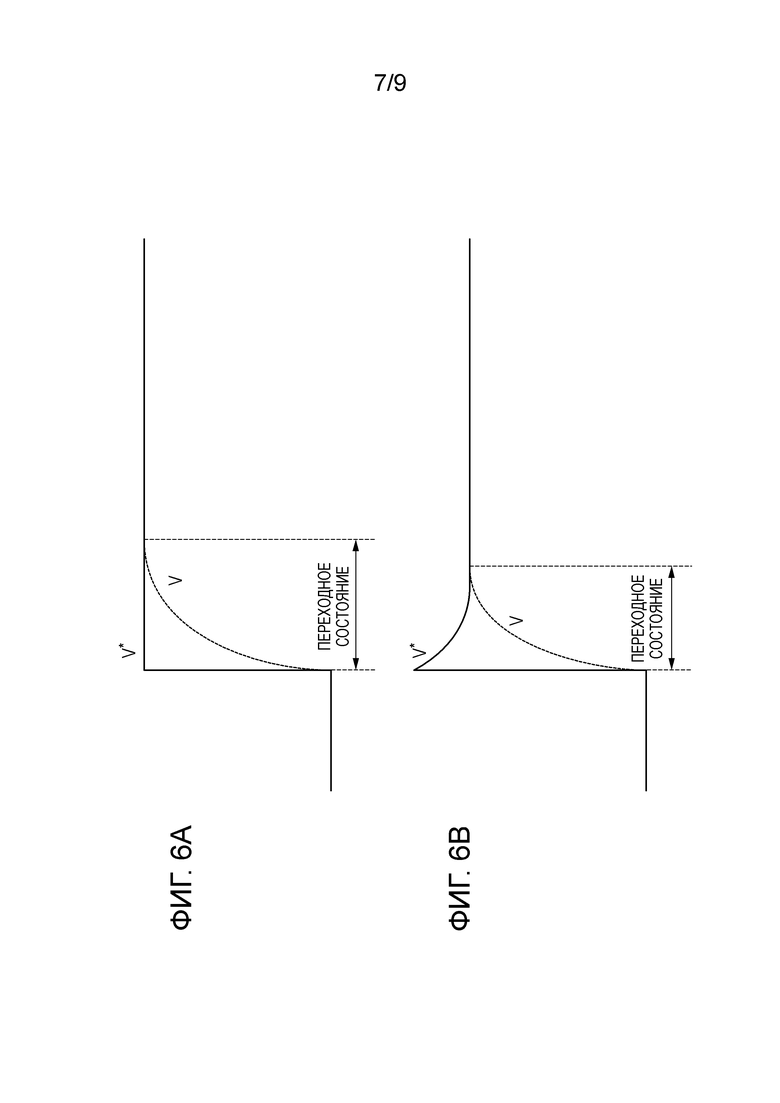
[0101] Ниже описан процесс управления коэффициентом усиления контроллером 502 тока со ссылкой на фиг. 6.
[0102] На фиг. 6 показана пояснительная диаграмма процесса управления коэффициентом усиления контроллером 502 тока.
[0103] На фиг. 6(a) показана диаграмма, демонстрирующая предписанное значение и подаваемое напряжение, когда процесс управления коэффициентом усиления не осуществляется. В этой диаграмме преобразование значения V* предписанного значения напряжения, выводимого из контроллера 502 тока, в напряжение, подаваемое на двигатель 104, указано сплошной линией, и фактическое напряжение V, подаваемое на двигатель 104, указано пунктирной линией. Следует отметить, что, для удобства объяснения, далее приведено описание преобразования значения V* предписанного значения напряжения, выводимого из контроллера 502 тока, в напряжение, подаваемое на двигатель 104, как предписанное значение V* напряжения.
[0104] Время задержки проходит от изменения предписанного значения V* напряжения до целевого значения до достижения фактическим подаваемым напряжением V целевого значения. Таким образом, как показано на этой диаграмме, даже если предписанное значение напряжения изменяется для формирования прямоугольной формы, фактическое напряжение, подаваемое на двигатель, не формирует прямоугольную форму, и берется время до совпадения фактического подаваемого напряжения с предписанным значением напряжения. Состояние до такого совпадения подаваемого напряжения с предписанным значением напряжения именуется переходным состоянием.
[0105] На фиг. 6(b) показана диаграмма, демонстрирующая предписанное значение напряжения и подаваемое напряжение в случае, когда осуществляется процесс управления коэффициентом усиления. В этой диаграмме предписанное значение V* напряжения, когда осуществляется процесс управления коэффициентом усиления указано сплошной линией, и фактическое напряжение V, подаваемое на двигатель 104, указано пунктирной линией. Как показано на этой диаграмме, осуществление управления коэффициентом усиления при предписанном значении V* напряжения обеспечивает сокращение периода в переходном состоянии до совпадения фактического напряжения V, подаваемого на двигатель, с предписанным значением V* напряжения. Следует отметить, что на фиг. 6(b) показан один пример процесса управления коэффициентом усиления, не ограничиваясь способом проиллюстрированного процесса управления коэффициентом усиления.
[0106] В данном случае длительный период работы удлиняет время задержки с момента времени получения предписанного значения V* напряжения до фактического задействования переключающих элементов. Таким образом, когда осуществляется процесс управления коэффициентом усиления, период до того, как подаваемое напряжение фактически достигает целевого значения предписанным значением V* напряжения после процесса управления коэффициентом усиления удлиняется. Таким образом, например, при большой величине коэффициента усиления, если происходит выброс, выброс усиливается, приводя к диффузии подаваемого напряжения.
[0107] Таким образом, контроллер 502 тока уменьшает величину коэффициента усиления по мере увеличения периода работы (по мере увеличения коэффициента K изменения) и увеличивает величину коэффициента усиления по мере уменьшения периода работы. Таким образом, это обеспечивает уменьшение периода в переходном состоянии при подавлении удлинения выброса и диспергирования подаваемого напряжения.
[0108] Способ управления электрической мощностью первого варианта осуществления позволяет получить следующие результаты.
[0109] Согласно способу управления электрической мощностью первого варианта осуществления, датчик 106 тока осуществляет этап измерения тока, на котором измеряют ток, подаваемый на двигатель 104 в момент времени, когда несущая волна достигает максимума или минимума. Затем контроллер 111 двигателя осуществляет этап вычисления предписанного значения, на котором вычисляют предписанное значение заполнения согласно измеренному току и необходимому крутящему моменту для двигателя 104. Затем, этап функционирования, на котором сравнивает несущую волну с предписанным значением заполнения по величине и осуществляют операцию переключения переключающих элементов согласно результату сравнения осуществляется.
[0110] Контроллер 111 двигателя сравнивает предписанное значение заполнения согласно определенному измеренному току с несущей волной и осуществляет этап определения, на котором определяют, требуется ли изменение периода работы, в течение которого осуществляется операция переключающих элементов Tr согласно результату сравнения. Когда контроллер 111 двигателя определяет, что температура полупроводниковой микросхемы высока, и период работы должен изменяться на этапе определения, осуществляются первый этап подавления, этап сравнения и второй этап подавления.
[0111] Первый этап подавления подавляет операцию переключения переключающих элементов в первом полуцикле. На этапе сравнения изменяют наклон несущей волны, сравнивают несущую волну после изменения с предписанным значением заполнения, и задействуют переключающие элементы согласно результату сравнения в течение промежуточного периода. На втором этапе подавления подавляют операцию переключения переключающих элементов в последнем полуцикле.
[0112] Таким образом, в течение периода работы после изменения, переключающие элементы задействуются только в течение промежуточного периода. При этом, в первом полуцикле и в последнем полуцикле, операция переключающих элементов Tr подавляется. Соответственно, в течение периода работы после изменения, переключающие элементы задействуются только в течение промежуточного периода, что гарантирует снижение рабочей частоты переключающих элементов Tr. Поскольку увеличение температуры полупроводниковой микросхемы может снижаться, полупроводниковая микросхема может защищаться.
[0113] Кроме того, в течение промежуточного периода, когда осуществляется этап сравнения, переключающие элементы задействуются согласно результату сравнения между предписанным значением заполнения, вычисленным на этапе вычисления предписанного значения, и несущей волной. Соответственно, предписанное значение заполнения по сравнению с несущей волной в течение периода работы не вычисляется до периода работы, но вычисляется в течение периода работы. Таким образом, время задержки от момента времени измерения тока на этапе измерения тока до начала сравнения между предписанным значением заполнения согласно измеренному току и несущей волной может быть короче периода работы.
[0114] Способ управления электрической мощностью первого варианта осуществления устанавливает одно из максимального значения и минимального значения несущей волны равным предписанному значению заполнения согласно тому, является ли наклон несущей волны положительным или отрицательным в течение промежуточного периода в первом полуцикле. При этом, в последнем полуцикле, другое из максимального значения и минимального значения несущей волны устанавливается равным предписанному значению заполнения. Благодаря такому установлению предписанного значения заполнения, несущая волна и предписанное значение заполнения не пересекаются в первом полуцикле и последнем полуцикле, что обеспечивает подавление операции переключения переключающих элементов Tr.
[0115] Способ управления электрической мощностью первого варианта осуществления не изменяет частоты несущей волны в первом полуцикле, когда осуществляется первый этап подавления, и последнем полуцикле, когда осуществляется второй этап подавления. В данном случае, в зависимости от ограничений на полупроводниковую микросхему, возможен случай, когда наклон несущей волны может изменяться только в момент времени, когда несущая волна достигает максимума или минимума. Даже в таком случае, поскольку наклон несущей волны не изменяется в первом полуцикле и последнем полуцикле, и несущая волна изменяется от одного из максимального значения и минимального значения до другого, градиент несущей волны может изменяться в начальный и конечный моменты времени промежуточного периода. Соответственно, может повышаться свобода конструкции.
[0116] Способ управления электрической мощностью первого варианта осуществления использует предписанное значение заполнения, полученное на основании тока, измеренного в начальный момент времени периода работы, включающего в себя промежуточный период, в течение промежуточного периода. Таким образом, время задержки с момента времени измерения тока до установления предписанного значения заполнения согласно измеренному току эквивалентно времени первого полуцикла.
[0117] При этом, в случае, когда частота несущей волны снижается, как в уровне техники, время задержки с момента времени измерения тока до установления предписанного значения заполнения согласно измеренному току эквивалентно периоду работы после изменения. Таким образом, этот вариант осуществления позволяет сокращать время задержки с момента времени измерения тока до установления предписанного значения заполнения согласно измеренному току, что обеспечивает повышение точности управления вращением двигателя 104.
[0118] Дополнительно, из моментов времени, когда несущая волна достигает максимума или минимума, ток не измеряется в моменты времени, отличные от момента времени измерения тока, и предписанное значение заполнения не вычисляется. Таким образом, нагрузка обработки, оказываемая на контроллер двигателя, может снижаться.
[0119] Согласно способу управления напряжением первого варианта осуществления, блок 504 коррекции напряжения осуществляет этап корректировки, на котором корректируют предписанные значения Vu0*, Vv0* и Vw0* напряжения трехфазного переменного тока согласно периоду работы после изменения и длительность промежуточного периода. В частности, на этапе корректировки, предписанное значение напряжения увеличивается с коэффициентом K/(K-2), полученным делением длительности периода работы, удлиненного с коэффициентом K изменения, на длительность промежуточного периода.
[0120] Поскольку выполнение этапа сравнения приводит к изменению наклона несущей волны в течение промежуточного периода, коэффициент заполнения не достигает значения, соответствующего исходному предписанному значению заполнения. Таким образом, осуществление такого этапа корректировки позволяет учитывать изменение наклона. Это позволяет устанавливать коэффициент заполнения равным значению согласно исходному предписанному значению заполнения. Соответственно, переключающими элементами Tr можно оперировать в начальный момент времени согласно измеренному току; таким образом, можно повысить точность управления вращением двигателя 104.
[0121] Способ управления напряжением первого варианта осуществления содержит этап управления коэффициентом усиления, на котором осуществляется процесс управления коэффициентом усиления согласно коэффициенту K изменения вычислителем 502 предписанного значения тока.
[0122] В данном случае, задержка возникает от изменения предписанного значения напряжения до совпадения предписанного значения с фактическим подаваемым напряжением, и это задержанное состояние именуется переходным состоянием. Для сокращения периода в этом переходном состоянии, процесс управления коэффициентом усиления осуществляется в момент времени изменения предписанного значения напряжения. В данном случае, чем длиннее период работы, тем больше время задержки. Соответственно, большой коэффициент усиления может приводить к выбросу подаваемого напряжения за счет процесса управления коэффициентом усиления, приводя к диспергированию напряжения. Таким образом, благодаря осуществлению управления коэффициентом усиления согласно коэффициенту K изменения периода работы, в частности, установлению малой величины коэффициента усиления в процессе управления коэффициентом усиления при увеличении коэффициента K изменения, вероятность возникновения выброса может снижаться, и период в переходном состоянии может быть коротким.
[0123] Способ управления электрической мощностью первого варианта осуществления осуществляет этап определения, на котором определяют, нужно ли изменять период работы согласно, по меньшей мере, одному из температуры полупроводниковой микросхемы, скорости вращения двигателя 104 и предписанного значения крутящего момента двигателя 104. Определяется диапазон температур, в котором полупроводниковая микросхема работает стабильно. Таким образом, период работы изменяется при повышении измеренной температуры полупроводниковой микросхемы. Период работы изменяется при снижении скорости вращения двигателя 104. Период работы изменяется с увеличением абсолютного значения предписанного значения T* крутящего момента двигателя 104. Соответственно, если существует вероятность того, что температура полупроводниковой микросхемы выходит за пределы диапазона температур стабильной работы, снижение рабочей частоты переключающих элементов Tr подавляет тепловыделение полупроводниковой микросхемы и обеспечивает защиту полупроводниковой микросхемы.
[0124] Второй вариант осуществления
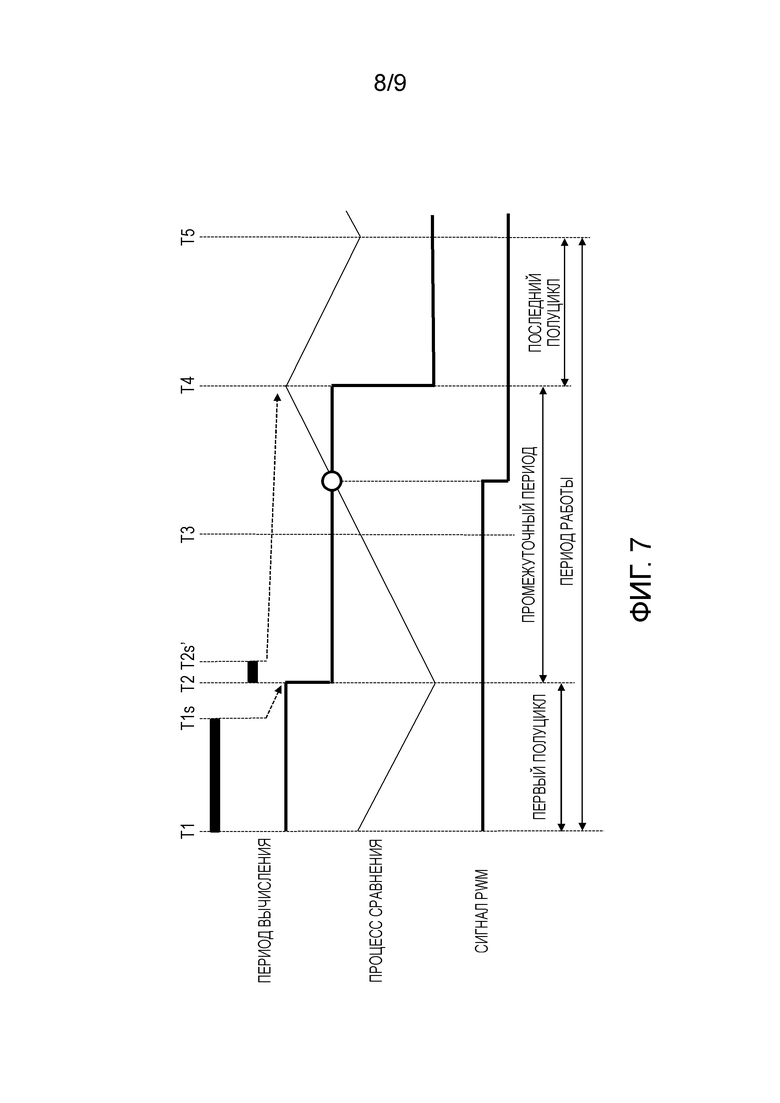
Первый вариант осуществления описывает пример, где наклон несущей волны не изменяется в первом полуцикле и последнем полуцикле, но наклон изменяется только в течение промежуточного периода; однако это не следует рассматривать в ограничительном смысле. Ниже описан случай, когда наклон несущей волны изменяется также в первом полуцикле и последнем полуцикле аналогично промежуточному периоду, и абсолютное значение наклона несущей волны не изменяется на всем участке периода работы.
[0125] На фиг. 7 показана пояснительная диаграмма для управления сигналом PWM, когда абсолютное значение наклона в течение периода работы не изменяется. Эта диаграмма демонстрирует управление сигналом PWM в течение периода работы (времена T1 - T5) с коэффициентом K изменения 4.
[0126] Во время T1, то есть в момент времени, когда несущая волна достигает максимума, датчик 106 тока измеряет ток. Контроллер 111 двигателя использует измеренный ток и начинает вычисление предписанного значения.
[0127] В первом полуцикле времен T1 и T2, наклон несущей волны изменяется, и абсолютное значение равно наклону несущей волны в течение промежуточного периода (времена T2 - T4). Поскольку наклон несущей волны в течение промежуточного периода (времена T2 - T4) положителен, предписанное значение заполнения достигает максимального значения (высокая сторона) несущей волны. Таким образом, поскольку несущая волна и предписанное значение заполнения не пересекаются в первом полуцикле, операция переключения переключающих элементов Tr не осуществляется. Одновременно, во время T1, контроллер 111 двигателя начинает процесс вычисления предписанного значения заполнения между временами T2 - T4.
[0128] Во время T1s контроллер 111 двигателя завершает процесс вычисления предписанного значения заполнения.
[0129] Во время T2, то есть в начале промежуточного периода, контроллер 111 двигателя начинает процесс сравнения между предписанным значением заполнения, вычисленным во время T1s, и несущей волной. Следует отметить, что несущая волна монотонно возрастает от минимального значения до максимального значения в течение промежуточного периода, и несущая волна пересекается с предписанным значением заполнения; таким образом, осуществляется операция переключения переключающих элементов Tr. Одновременно, во время T2 контроллер 111 двигателя начинает процесс определения предписанного значения заполнения.
[0130] Во время T2s' контроллер 111 двигателя завершает процесс определения предписанного значения заполнения. Поскольку наклон промежуточного периода положителен, этот процесс определения определяет минимальное значение (низкая сторона) несущей волны как предписанное значение заполнения в последнем полуцикле начиная со времени T4. Следует отметить, что при отрицательном наклоне промежуточного периода, максимальное значение (высокая сторона) несущей волны определяется как предписанное значение заполнения в последнем полуцикле.
[0131] Во время T4, то есть, когда промежуточный период заканчивается, контроллер 111 двигателя начинает сравнение предписанного значения заполнения, определенного во время T2s', с несущей волной.
[0132] Во время T5, то есть в момент времени, когда заканчивается последний полуцикл, и начинается следующий период работы, градиент несущей волны попеременно принимает положительное и отрицательное значение.
[0133] Таким образом, в течение периода работы после изменения (времена T1 - T5), переключающие элементы Tr задействуются только в течение промежуточного периода (времена T2 - T4), и переключающие элементы Tr не задействуются в первом полуцикле (времена T1 - T3) и последнем полуцикле (времена T4 и T5). Поскольку переключающие элементы Tr задействуются в течение каждого периода работы, в четыре раза превышающего полуцикл несущей волны до изменения, рабочая частота может устанавливаться в 4 раза меньшей.
[0134] На фиг. 8 показана пояснительная диаграмма процесса изменения рабочей частоты переключающих элементов. На фиг. 8(a) показана пояснительная диаграмма процесса генерации сигнала PWM, когда рабочая частота не изменяется. На фиг. 8(b) показана пояснительная диаграмма процесса генерации сигнала PWM при подавлении работы переключающих элементов, представленных на фиг. 7. Эта диаграмма демонстрирует процесс генерации сигнала PWM с периодом, более длинным, чем период, показанный на фиг. 7.
[0135] Данная схема демонстрирует, что абсолютное значение наклона несущей волны не изменяется на протяжении всего участка. Например, аналогично временам T5 и T9, градиент несущей волны переключается между положительным и отрицательным значениями в момент времени входа в следующий период работы из определенного периода работы, то есть в момент времени, когда период работы начинается или заканчивается. Такая операция позволяет реализовать изобретение согласно вариантам осуществления.
[0136] Способ управления электрической мощностью согласно второму варианту осуществления позволяет получить следующие результаты.
[0137] Согласно способу управления электрической мощностью второго варианта осуществления, абсолютное значение наклона несущей волны одинаково на первом этапе подавления, этапе сравнения и втором этапе подавления, и наклон несущей волны переключается между положительным и отрицательным значениями в начальный момент времени первого этапа подавления.
[0138] Таким образом, рабочая частота переключающих элементов Tr может снижаться. Дополнительно, подавление частого изменения абсолютного значения наклона несущей волны обеспечивает снижение нагрузки обработки, оказываемой на контроллер 111 двигателя. В зависимости от контроллера двигателя, хотя абсолютное значение наклона несущей волны не может часто изменяться, возможен случай, когда наклон может переключаться между положительным и отрицательным значениями в момент времени, отличный от момента времени, когда несущая волна достигает максимального значения или минимального значения. Настоящее изобретение можно реализовать также в этом случае; таким образом, может повышаться свобода конструкции.
[0139] Вышеописанные варианты осуществления настоящего изобретения являются лишь иллюстрацией некоторых примеров применения настоящего изобретения и не призваны ограничивать технический объем настоящего изобретения конкретными конструкциями вышеописанных вариантов осуществления. Варианты осуществления можно надлежащим образом комбинировать.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВЕРТОРНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2011 |
|
RU2533167C1 |
| КОНТРОЛЛЕР ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2019 |
|
RU2706928C1 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2011 |
|
RU2525863C1 |
| РЕГУЛЯТОР МОЩНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ РЕГУЛЯТОРОМ МОЩНОСТИ | 2007 |
|
RU2381610C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2551420C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ | 2015 |
|
RU2682664C1 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 2019 |
|
RU2709196C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО СОЛЕНОИДА | 2019 |
|
RU2719336C1 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ РАБОТОЙ ИПБ | 2008 |
|
RU2484572C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2410831C1 |
Изобретение относится к области электротехники и может быть использовано в устройствах управления электрической мощностью в трехфазных двигателях переменного тока. Техническим результатом является повышение точности управления. Способ управления электрической мощностью, содержащий: этап измерения тока; этап вычисления предписанного значения; этап функционирования; этап определения, на котором определяют, изменять ли период работы, в течение которого осуществляется этап функционирования, чтобы он был длиннее одного цикла несущей волны; первый этап подавления, на котором подавляют операцию переключения переключающих элементов в первом полуцикле несущей волны, начиная с начального момента времени периода работы после изменения, в течение которого несущая волна монотонно изменяется; этап сравнения, на котором изменяют наклон несущей волны в течение промежуточного периода между первым полуциклом несущей волны и последним полуциклом несущей волны в течение периода работы после изменения для сравнения несущей волны с предписанным значением заполнения по величине, причем на этапе сравнения осуществляется операция переключения переключающих элементов согласно результату сравнения; и второй этап подавления, на котором подавляют операцию переключения переключающих элементов в последнем полуцикле несущей волны. 2 н. и 7 з.п. ф-лы, 15 ил.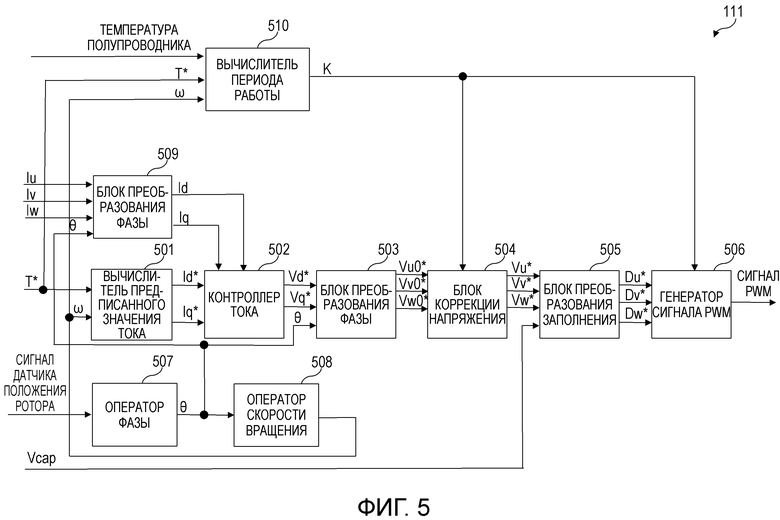
1. Способ управления электрической мощностью, который управляет электрической мощностью, подаваемой в двигатель, причем способ управления электрической мощностью содержит:
этап измерения тока, на котором измеряют ток, подаваемый в двигатель, в моменты времени, когда несущая волна достигает максимума или минимума;
этап вычисления предписанного значения, на котором вычисляют предписанное значение заполнения согласно току, измеренному на этапе измерения тока, и необходимому крутящему моменту для двигателя;
этап функционирования, на котором сравнивают несущую волну с предписанным значением заполнения по величине, по мере того как несущая волна монотонно изменяется от одного из максимального значения и минимального значения до другого, причем на этапе функционирования осуществляют операцию переключения переключающих элементов согласно результату сравнения;
этап определения, на котором определяют, изменять ли период работы, в течение которого осуществляется этап функционирования, чтобы он был длиннее одного цикла несущей волны;
первый этап подавления, на котором подавляют операцию переключения переключающих элементов в первом полуцикле несущей волны, начиная с начального момента времени периода работы после изменения, в течение которого несущая волна монотонно изменяется, когда на этапе определения определено изменение периода работы;
этап сравнения, на котором изменяют наклон несущей волны в течение промежуточного периода между первым полуциклом несущей волны и последним полуциклом несущей волны в течение периода работы после изменения для сравнения несущей волны с предписанным значением заполнения по величине, причем на этапе сравнения осуществляют операцию переключения переключающих элементов согласно результату сравнения; и
второй этап подавления, на котором подавляют операцию переключения переключающих элементов в последнем полуцикле несущей волны.
2. Способ управления электрической мощностью по п. 1, в котором
на первом этапе подавления устанавливают одно из максимального значения и минимального значения несущей волны равным предписанному значению заполнения согласно тому, является ли наклон несущей волны положительным или отрицательным в течение промежуточного периода, и
на втором этапе подавления устанавливают другое равным предписанному значению заполнения.
3. Способ управления электрической мощностью по п. 1 или 2, в котором
наклон несущей волны не изменяется на первом этапе подавления и втором этапе подавления.
4. Способ управления электрической мощностью по п. 1 или 2, в котором
на первом этапе подавления, этапе сравнения и втором этапе подавления абсолютное значение наклона несущей волны одинаково, и
наклон несущей волны переключается между положительным и отрицательным в начальный момент времени первого этапа подавления.
5. Способ управления электрической мощностью по п. 1 или 2, в котором
на этапе сравнения сравнивают предписанное значение заполнения, вычисленное с использованием тока, измеренного в начальный момент времени периода работы после изменения, с несущей волной.
6. Способ управления электрической мощностью по п. 1 или 2, дополнительно содержащий
этап корректировки, на котором корректируют предписанное значение заполнения согласно периоду работы после изменения и длительности промежуточного периода.
7. Способ управления электрической мощностью по п. 1 или 2, дополнительно содержащий
этап управления коэффициентом усиления, на котором осуществляют управление коэффициентом усиления согласно коэффициенту изменения периода работы.
8. Способ управления электрической мощностью по п. 1 или 2, в котором
на этапе определения определяют, изменять ли период работы, согласно, по меньшей мере, любому из температуры полупроводниковой микросхемы, на которой осуществляется способ управления электрической мощностью, скорости вращения двигателя и предписанного значения крутящего момента двигателя.
9. Устройство управления электрической мощностью, содержащее:
датчик тока, выполненный с возможностью измерения тока, подаваемого в двигатель, в момент времени измерения, когда величина несущей волны достигает максимума или минимума; и
контроллер, выполненный с возможностью измерения тока, подаваемого в двигатель, в момент времени, когда несущая волна достигает максимума или минимума, причем контроллер выполнен с возможностью вычисления предписанного значения заполнения согласно измеренному току и необходимому крутящему моменту для двигателя, причем контроллер выполнен с возможностью сравнения несущей волны с предписанным значением заполнения по величине, по мере того как несущая волна монотонно изменяется от одного из максимального значения и минимального значения до другого, причем контроллер выполнен с возможностью осуществления операции переключения переключающих элементов согласно результату сравнения, причем
контроллер
выполнен с возможностью определения, изменять ли период работы, в течение которого осуществляется этап функционирования, для осуществления операции переключения переключающих элементов;
подавляет операцию переключения переключающих элементов в первом полуцикле несущей волны, начиная с начального момента времени периода работы после изменения, в течение которого несущая волна монотонно изменяется, когда контроллер определяет изменение периода работы;
выполнен с возможностью изменения наклона несущей волны в течение промежуточного периода между первым полуциклом несущей волны и последним полуциклом несущей волны в течение периода работы после изменения, сравнения несущей волны с предписанным значением заполнения по величине, по мере того как измененная несущая волна монотонно изменяется от одного из максимального значения и минимального значения до другого, и осуществления операции переключения переключающих элементов согласно результату сравнения; и
выполнен с возможностью подавления операции переключения переключающих элементов в последнем полуцикле несущей волны.
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2483424C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| JP 2009100599 A, 07.05.2009 | |||
| JP 2012110088 A, 07.06.2012 | |||
| JP 2009136125 A, 18.06.2009 | |||
| US 20100185350 A1, 27.07.2010 | |||
| ОКИСЛИТЕЛЬНАЯ СИСТЕМА С ВТОРИЧНЫМ РЕАКТОРОМ ДЛЯ БОКОВОЙ ФРАКЦИИ | 2010 |
|
RU2579452C2 |

