(54) СПОСОБ ПОВЕРКИ ПРЕОБРАЗОВАТЕЛЕЙ. УГЛА ПОВОРОТА ВАЛА В КОД


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения погрешности преобразователя угла поворота вала в код | 1982 |
|
SU1109783A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОГРЕШНОСТИ ПРЕОБРАЗОВАТЕЛЯ ПОВОРОТА ВАЛА В КОД | 2014 |
|
RU2559174C1 |
| СПОСОБ ПОВЕРКИ ПРЕОБРАЗОВАТЕЛЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2060585C1 |
| Цифровой тахометр | 1983 |
|
SU1151888A1 |
| Автоматический дифрактометр | 1988 |
|
SU1562807A1 |
| Устройство для определения направления магнитокристаллической текстуры ферромагнитных тел вращения | 1989 |
|
SU1659932A1 |
| Устройство для поверки стрелочных приборов с круговой шкалой | 1981 |
|
SU1106985A1 |
| Устройство для центрирования линз | 1986 |
|
SU1455235A1 |
| Способ поверки преобразователей углапОВОРОТА ВАлА B КОд и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU824265A1 |
| Стенд для поверки приборов активного контроля | 1978 |
|
SU743852A1 |
1
Изобретение относится к автоматике и контрольно-измерительной технике и может быть использовано для первичной . и периодической поверки высокоточных преобразователей угла в код. 5.
Известны способы поверки преобразователей угла в код, состошдие в измерении с заданной погрешностью поворотов вала относительно корпуса преобразователя, соответству1сядих каждому Ю из последовательных кодовых сигналов на его выходе. Для этого в современном приборостроении используются гониометры общего применения .
Недостатками поверки с помощью го-15 ниометров ЯВЛЯЮТСЯ большая трудоемкость операций, зависимость качества поверки от квалификации измерителя и неизбежность личных ошибок, требование обеспечить, с высокой точностью 20 соосность вращения вала преобразователя и алидады гониометра, ограниченная разрешающая способность и точность гониометров, используквдих разделенный круг в качестве рабочей ме- 15 ры угла.
Известен способ измерения углов посредством лазерных гирометров, заключающийся в суммировании периодов выходного сигнала непрерывно врааданмаве- 30
гося гирометра в течение поворота на шйёрйёмай УГОЛ.Существует область скоростей вращения, определяемая параметрами конкретного гирометра, где зависимость числа периодов N от угла поворота 9 линейна
(1)
k Q cos (f ,
N
где k - масштабный коэффициент гирометра,
осью чувствительности гирометра.
Достоинствами способа измерения углов посредством лазерного гирометра являются высокая разрешающая способность и точность (погрешность порядка сотых долей УГЛОВОЙ секунды при использовании прецизионных гирометров), автоматичёский съем изме ительной информации посредством электронных счетчиков импульсов, независимость погрешности измерений от стабильности вращения и диапазона линейности зависимости Н(Й) отсутствие требований к центровке гирометра относительно оси вращения .
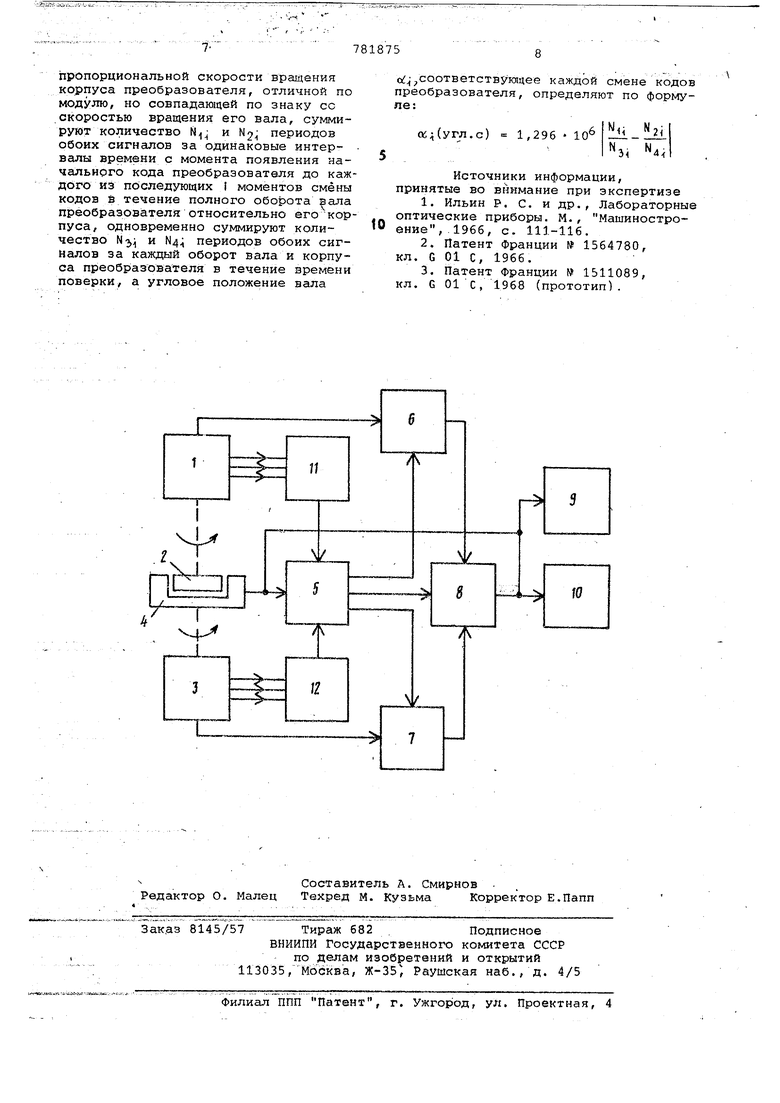
Однако .при малых скоростях вращений йЬзййкает синхронизация (захват) частот двух волн лазерного излучения, распространяющихся встречно по периметру кольцевого резонатора гирометра. В области синхронизации частот периодический выходной сигнал, содерлсащий информацию об угле поворота гирометра, отсутствует и появляется лишь при увеличении скорости. Таким образом, это явление определяет нижнюю границу допустимых угловых скоростей. Верхний предел скорости вращения вала фотоэлектрического преобразователя угол-код относительно корпуса устанавливается ростом погреш ности съема информации. Наиболее близким техническим решением к предлагаемому изобретению является способ измерения углов, в котором формируют периодический сигнал с чадтотой, пропорциональной скорости вращения преобразователя относительно медленно вращающегося объекта (опоры угол поворота которого нужно измерить Периоды выходного сигнала преобразователя суммируют в течение его поворота на измеряемые углы и в течение полного оборота. Результат измерения определяют из .соотношения количества периодов выходного сигнала преобразователя при повороте его на измеряемый угол к количеству периодов при повороте на полный оборот. Формирование периодических сигналов с частотой, пропорциональной скорости вратцения преобразователя, осуществляют с помо щью гирометров З , Недостаток такого способа заключа ется в .том, что любое изменение угло вой скорости вращения преобразовател (rHpOMeTpaj относительно объекта, на котором он установлен (опоры), ведет к увеличению погрешности измерений. Это увеличение погрешности является следствием того, что результат измерения определяетсяне полным вращени ем гирометра, а лишь одной из его со ставляющих - вращением опоры, на которой он установлен. Другая составля ющая (вращение гирометра относительн опоры) является всйомогательной и .не обходимой для того, чтобы скорость Суммарного, вращения превышала нижнюю границу допустимьос для используемого гирометра угловых скоростей. Таким образом, возможность измерений при произвольно медленном вращении опоры достигается за счет утраты одного из оёно:|ных достоинств способа измерений углов посредством лазерных гирометров - независимости погрешности о стабильмбсти вращения. Цель изобретения - повышение точности поверки преобразователей угла в код. Поставленная цель достигается тем чт6 одновременно формируют периодиче кие сигналы с частотой, пропорционал ной скорости вращения корпуса прёобазователя, отличной по модулю, но совпадающей по знаку со скоростью вращения его вала, суммируют количество N и Nj периодов обоих сигнаов за одинаковые интервалы времени с момента появления начального кода преобразователя до каждого из последующих i моментов смены кодов в течение полного оборота вала преобразователя относительно его корпуса, одновременно суммируют количество периодов N,} и N4 обоих сигналов за каждый полный оборот ваЛа и корпуса преобраэоватёля в течение времени поверки, а угловое положение вала CL, соответствующее каждой смене кодов преобразователя, определяют по формуле (угл.с) 1,296 ai N4 для уменьшения погрешности поверки можно использовать известный прием усреднения результатов нескольких 1 измерений для одного и того же момента .смены кодов . 1«т.d: (угл.с.) 1,296 Формирование периодических сигналов осуществляется с помощью гирометров. Такой способ поверки преобразователей угла в код позволяет осуществить независимый выбор угловых скоростей как самих гирометров, так и вращения вала преобразователя относительно корпуса. Выбор меньшей Йд, из угловых Скоростей гирометров определяется необходимым для выхода на линейный участок зависимости N(6) удалением от зоны синхронизации частот. Условие выбора большей Л g, из угловых скоростей гирометров состоит в том, чтобы разность (Лр-Яд,) не превышала допустимого предела Я. „ругловой скорости относительно вращения вала и корпуса преобразователя. В данном способе измерений быстрое вращение каждого из гирометров является основным движением, за счет которого происходит измерительное преобразование угла. Медленное относи- , тельно корпуса вра1чение вала преобразователя образуется как разность этих двух вращений. Вследствие это-, го становится возможным одновременно устранить требования к стаб.ильности вращения гирометров, т. е. получить независимость погрешности измерений от изменений угловой скорости, и получить произвольно медленное вращение вала преобразователя относительно корпуса. На чертеже представлена структурная схема устройства. Устройство содержит гирометр 1, вращающийся совместно с валом. 2 поверяемого преобразователя, гирометр 3, вращающийся совместно с его корпусом 4, блок 5 временных селекторов блоки б и 7 электронных счетчиков, блок 8 оперативной памяти, цифропечатающую машину 9, микро-ЭВМ 10. Для фиксации моментов, соответствующих полным оборотам ка:ждого из гирометров, устройство содержит фотоприемники 11 и 12, установленные неподвижно относительно вращающихся узлов. Расположение фотоприемника 11 таково, что в моменты, соответствующие некоторому произвольному, но повторяющемуся на каждом обороте положению ги- рометра 1, его светочувствительная поверхность засвечивается. Фотоприемник 12 расположен аналогичным образом относительно гирометра 3. Выходы обоих гирометров соединены (например через кольцевые токосъемники) со входами блоков 6 и 7 электронных счет иков. Выход преобразователя угла в код соединен со входами блока 5 временных селекторов, цифропечатающей машины 9 и микро-ЭВМ 10. Выходы фотоприемников 11 и 12 соединены со входами блока 5 временных селекторов. Выходы блока 5 соединены со входами блоков 6 и 7 электронных счетчиков и со входом блока 8 оперативной памяти . Выходы блока 8 соединены со . входами цифропечатающей машины 9 и микро-ЭВМ 10.
Устройство поверки преобразователей работает следующим образом.
Гирометр 1, скрепленный с валом 2 поверяемого преобразователя, приводится во вращение. Гирометр 3, скрепленный с корпусом 4 преобразователя, приводится во вращение в,ту же сторону , что и Гирометр 1, но с другой угловой скоростью, в момент появления на выходе преобразователя импульса, означающего смену кода, с выхода блока 5 временных селекторов навходы блоков б и 7 электронных счетчиков одновременно поступает сигнал, разрешакиций счет количества периодов, выходных сигналов гирометров 1 и 3.. В момент следукнцей смены кода преобразователя с выхода блока 5 на блоки 6 и 7 одновременно поступают сигналы, которые фиксируют полученные к этому моменту суммы периодов сигналов с гирометров 1 и 3 путем передачи их в виде параллельного кода в блок 8 оперативной памяти. Из блока 8 числа, равные числу периодов выходных сигналов гирометров 1 и 3 за время данного I измерения, в виде параллельного кода передаются на цифропеч такадую машину 9 для непосредственного контроля результатов и на микро-ЭВМ 10, посредством которой производится вычисление результатов поверки. В последующие моменты смены кодов преобразователя взаимодёйствие узлов и блоков происходит аналогично.
Количество периодов выходных сигналов гирометров 1 и- 3 за время пол781875
ных оборотов каждого из них формиру|ется следующим образом.
В момент, когда пучок излучения из резонатора гирометра 1 при его вращении попадает на светочувствительную поверхность Фотоприемника 11, на его. выходе Нормируется импульс, поступагощий на вход блока 5 временных селекторов. На выходе блока 5 при этом формируется сигнал, разрешающий счет периодов выходного сигнала
0 гирометра 1, который осуществляется в блоке б электронных счетчиков параллельно счету периодов того же сигнала за интервалы, определяемые сменой кодов преобразователя. Счет ос5танавливается в момент появления следующего импульса на выходе фотопри- . емника 11, когда гирометр 1 сделает полный оборот. Число, выражающее полученное количество периодов, фиксируется в блоке 8 оперативной па0мяти, а счет количества периодов с выхода гирометра 1 начинается вновь. Затем это число передается на цифропечатакядую машину 9 и в. микро-ЭВМ 10. Аналогичным образом происходит вза5имодействие фотоприемника 12 с гирометром 3, блоком 5 временных селекто- ров и блоком 7 электронных счетчиков.
Для идентификации результатов суммирования количества периодов вы0ходных сигналов гирометров с опреде.ленными кодами преобразователя его выходной сигнал передается на цифропечатающую машину 9 и микро-ЭВМ 10.
Поверка заканчивается, когда вал
5 2 доверяемого преобразователя совершит полный оборот относительно его корпуса 4.
Таким образом, предложенный способ поверки преобразователей угла в
0 ;код, обеспечивает погрешность поверки порядка десятых-сотых долей угловой секунды в зависимости от типа используемых гирометров при отсутствии требований к стабильности вращения, к центровке гирометров относительно оси
5 вращения вала и корпуса преобразователя и при автоматизации процесса поверки. Точность поверки по такому способу в несколько раз превьвиает точность серийных гониометров, кото0рые применяются в настоящее время для поверки преобразователей угла в код.
Формула изобретения
5
Способ поверки преобразователей .угла поворота вала в код, основанный на формировании периодического сигнала с частотой, пропорциональной ско40 рости вращения вала преобразователя, и суммировании периодов этого сигнала за время измерения, отличающийся тем, что, с целью повышения точности поверки формируют вто45 ой периодический сигнал с частотой . .
Пропорциональной скорости вращения корпуса преобразователя, отличной по модулю, но совпадающей по знаку со скоростью вращения его вала, суммируют количество N и N2 периодов обоих сигналов за одинаковые интервалы времени с момента появления начального кода преобразователя до каждого из последующих i моментов смены кодов в течение полного оборота вала преобразователя относительно его корпуса, одновременно суммируют количество N31 и N4 периодов обоих сигналов за каждый оборот вала и корпуса преобразователя в течение времени поверки, а угловое положение вала
о; .,соответствую1цее каждой смене кодов преобразователя, определяют по формуле:
N
2i
1,296 10
N.
Э 4,
Источники информации, принятые во внимание при экспертизе
