Настоящее изобретение относится к области гидроакустики, а также к области океанографии, и может быть использовано для оценки состояния ледового поля.
Наиболее важными задачами, решаемыми при формировании оценки состояния ледового поля, являются задачи измерения толщины погруженной части льда, а также определение направления и скорости движения ледовых полей. Решение указанных задач необходимо для обеспечения безопасности морских нефтяных платформ при проведении поисково-разведочных и добычных работ на месторождениях полезных ископаемых со дна морей и океанов. Кроме того, сведения о толщине погруженной части льда, рельефе нижней поверхности ледового поля могут быть использованы для изучения морфометрических характеристик ледовых полей в задачах океанографии.
Известен способ (патент на изобретение РФ №2449326 «Способ определения состояния ледяного покрова»), включающий определение абсолютной толщины льда и морфографические аномалии подводной части ледяного образования посредством параметрического гидроакустического измерителя путем зондирования ледового образования линейными частотно-модулированными импульсами. Гидролокационный параметрический измеритель размещают в водной среде на поворотной платформе, что позволяет выполнять облучение ледового образования под разными углами вдоль вертикальных (выступающие кили) и горизонтальных плоскостей ледового образования. Полученные изображения ледяного образования визуализируются на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов нижней поверхности льда.
К недостаткам данного способа-аналога следует отнести низкую производительность при определении абсолютной толщины льда вследствие использования однолучевого гидролокатора, а также отсутствие измерителей скорости и направления дрейфа ледового поля. Кроме того, существенным недостатком рассматриваемого способа-аналога является существенная погрешность измерения толщины льда, возникающая из-за вариаций значений скорости звука во льду, которая может меняться в достаточно широких пределах в зависимости от условий образования льда, его возраста, толщины и времени года.
Известен способ (Патент на изобретение РФ №2444760 «Способ съемки нижней поверхности ледяного покрова»), включающий размещение гидроакустической антенны, приемно-излучающего устройства в водной среде для получения картины видимой части исследуемого объекта (кили тористых образований, изометрические морфоструктуры поверхности дна ледового образования), производство экспозиций, которые привязаны к топопланам верхней поверхности льда, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда. Съемку осуществляют с нескольких горизонтов. Гидроакустическую аппаратуру (гидролокатор кругового обзора) размещают на управляемом подводном аппарате, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы. Изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам. Оценивают размер этих секторов и расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса.
К недостаткам данного способа следует отнести отсутствие учета скорости и направления дрейфа ледового поля при формировании гидролокационного изображения нижней поверхности дна за несколько циклов зондирования, что может привести к пропускам при обследовании из-за дрейфа ледового поля при работе подводного аппарата вблизи от нижней поверхности льда.
Кроме того, существенным недостатком рассматриваемого способа-аналога является отсутствие учета данных о скорости звука в водной среде, в результате искажается формируемое гидролокационное изображение нижней поверхности льда, а также возникают ошибки при определении размеров и оценке расстояний между элементами ледового поля.
Недостатком рассматриваемого способа-аналога также является отсутствие процедуры классификации принятых гидролокатором эхо-сигналов по классам: граница раздела «вода-воздух» и «вода-лед», что делает не возможным обнаружение ледовых образований небольших размеров на водной поверхности.
Для реализации известного способа-аналога требуется погружение и всплытие управляемого подводного аппарата, что требует наличия области на водной поверхности, свободной от льда, и накладывает ограничение на толщину льда при использовании бурового оборудования в случае отсутствия указанной области.
Наиболее близким аналогом к предлагаемому способу является способ оценки состояния ледового поля (Fissel et al. Improvements in the detection of hazardous sea ice features using upward looking sonar data // Proceedings of Arctic Technology Conference, USA, 3-5 Dec. 2012), в котором: излучают акустические сигналы в сторону нижней поверхности льда с автономной буйковой станции, принимают отраженные эхо-сигналы, производят оценку среднего значения скорости звука в слое воды между точкой излучения и нижней поверхностью льда, выполняют измерение расстояния от точки излучения до нижней поверхности льда h с учетом известного среднего значения скорости звука в воде, классифицируют принятые эхо-сигналы по классам «вода-воздух» и «вода-лед», измеряют глубину погружения точки излучения Н, измеряют толщину погруженной части льда d как d=H-h, измеряют направление и скорость дрейфа ледового поля, передают полученную информацию по акустическому каналу связи или по кабелю в систему обработки и отображения данных.
Существенным недостатком данного способа-прототипа является его низкая производительность, обусловленная небольшим размером сектора обзора нижней поверхности льда.
Угловые размеры характеристики направленности (ХН) гидроакустической приемоизлучающей антенны, используемой в известном способе-прототипе, определяют размеры облучаемого участка нижней поверхности льда - элемента разрешения по пространству, а также сектор обзора, поэтому увеличение угловых размеров ХН с целью расширения сектора обзора нецелесообразно.
Поскольку ХН гидроакустической приемоизлучающей антенны относительно узкая, то сектор обзора небольшой, и за один цикл зондирования получают только одно значение толщины погруженной части льда в пределах облучаемого участка нижней поверхности льда.
Кроме того, в известном способе-прототипе ХН гидроакустической приемоизлучающей антенны ориентирована по нормали к плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, без учета возможности наклона оси ХН. Таким образом, участок нижней поверхности льда, обследованный за несколько циклов зондирования, оказывается вытянут вдоль направления движения ледового поля, и имеет небольшие размеры в плоскости, перпендикулярной линии движения ледового поля.
В результате информацию о толщине погруженной части льда получают по лишь ограниченной части ледового поля, в то время как толщина погруженной части льда в необследованной области ледового поля может иметь большие значения, что позволяет классифицировать его как потенциально опасное, например, для буровой платформы.
Задача изобретения состоит в повышении производительности известного способа оценки состояния ледового поля.
Технический результат заключается в расширении сектора обзора нижней поверхности льда при сохранении размеров элемента разрешения по пространству, в пределах которого производится оценка погруженной части льда.
Для обеспечения указанного технического результата в известный способ оценки состояния ледового поля, в котором: излучают акустические сигналы в сторону нижней поверхности льда с автономной буйковой станции, принимают отраженные эхо-сигналы, производят оценку среднего значения скорости звука в слое воды между точкой излучения и нижней поверхностью льда, выполняют измерение расстояния от точки излучения до нижней поверхности льда h с учетом известного среднего значения скорости звука в воде, классифицируют принятые эхо-сигналы по классам «вода-воздух» и «вода-лед», измеряют глубину погружения точки излучения Н, измеряют толщину погруженной части льда d как d=H-h, измеряют направление и скорость дрейфа ледового поля, передают полученную информацию по акустическому каналу связи или по кабелю в систему обработки и отображения данных, введены новые признаки:
- оценку состояния ледового покрова производят с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в плоскости, параллельной плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, так что активные поверхности антенн направлены в сторону нижней поверхности льда.
- излучение акустических импульсов производят гидроакустической излучающей антенной с ХН, широкой - в плоскости наибольшего размера гидроакустической приемной антенны, нормальной к плоскости водной поверхности в спокойном состоянии и проходящей через длинную ось симметрии гидроакустической приемной антенны, и узкой - в плоскости наибольшего размера гидроакустической излучающей антенны, нормальной к плоскости водной поверхности в спокойном состоянии и проходящей через длинную ось симметрии гидроакустической излучающей антенны.
- прием эхо-сигналов от нижней поверхности льда производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом.
- обзор участка нижней поверхности льда в пределах сектора обзора производят за заданное число циклов зондирования путем последовательного поворота оси ХН гидроакустической излучающей антенны в плоскости ее наибольшего размера относительно нормали к нижней поверхности льда.
- перед началом каждого цикла зондирования производят измерение угла наклона гидроакустической излучающей антенны в плоскости ее наибольшего размера и угла наклона гидроакустической приемной антенны в плоскости ее наибольшего размера.
- в каждом цикле зондирования выполняют коррекцию угла наклона оси ХН в излучении в плоскости наибольшего размера гидроакустической излучающей антенны, а также коррекцию углов наклона осей приемных ХН в плоскости наибольшего размера гидроакустической приемной антенны.
- для каждого положения оси ХН гидроакустической излучающей антенны в полосе обзора измеряют расстояния от гидроакустической приемной антенны до нижней поверхности льда.
Таким образом, использование последовательного обзора нижней поверхности льда, заключающегося в перемещении формируемой полосы обзора, позволяет расширить сектор обзора, как в плоскости наибольшего размера гидроакустической приемной антенны, так и в плоскости наибольшего размера гидроакустической излучающей антенны при сохранении размеров элемента разрешения по пространству, в пределах которого производится оценка погруженной части льда, при этом выполнение коррекции угла наклона оси ХН в излучении, а также коррекции углов наклона осей приемных ХН позволяет стабилизировать текущее положение полосы обзора в пространстве для предотвращения пропусков при обзоре.
Реализация данного способа поясняется фиг. 1-2.
На фиг. 1 показана геометрия задачи формирования полосы обзора обследуемого участка нижней поверхности льда за заданное число циклов зондирования, на которой представлены: нормаль 1 к плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, плоскость 2, совпадающая со средним уровнем водной поверхности в спокойном состоянии, плоскость 3 наибольшего размера гидроакустической излучающей антенны, гидроакустическая излучающая антенна 4, гидроакустическая приемная антенна 5, автономная буйковая станция 6, плоскость 7 наибольшего размера гидроакустической приемной антенны, якорь 8, морское дно 9, полоса обзора за один цикл зондирования 10.
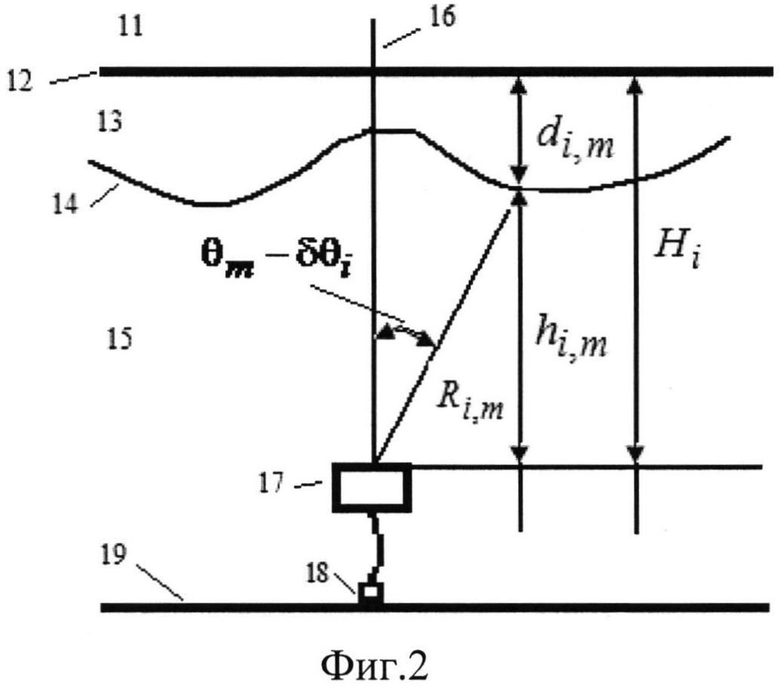
На фиг. 2 показана геометрия задачи оценки погруженной части льда, на которой представлены воздух 11, граница 12 раздела «воздух-вода», лед 13, нижняя поверхность 14 льда, вода 15, нормаль 16 к плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, автономная буйковая станция 17, якорь 18, морское дно 19.
Предложенный способ реализуется следующим образом: в районе обследования (фиг. 1) устанавливают автономную буйковую станцию 6, на которой размещают аппаратуру гидролокатора, датчик абсолютного гидростатического давления, доплеровский гидроакустический лаг, измеритель скорости звука, гидроакустическую излучающую антенну 4 и гидроакустическую приемную антенну 5. Положение автономной буйковой станции 6 над морским дном 9 фиксируется с помощью якоря 8.
Излучение акустических импульсов производят гидроакустической излучающей антенной 4 с характеристикой направленности, широкой - в плоскости 7 наибольшего размера гидроакустической приемной антенны, и узкой - в плоскости 3 наибольшего размера гидроакустической излучающей антенны.
Прием эхо-сигналов от нижней поверхности льда производят гидроакустической приемной антенной 5, формирующей статический веер приемных ХН электронным способом, причем отдельная ХН в приеме - широкая - в плоскости 3 наибольшего размера гидроакустической излучающей антенны, и узкая - в плоскости 7 наибольшего размера гидроакустической приемной антенны.
Гидроакустическая излучающая антенна 4 и гидроакустическая приемная антенна 5 соединены Т-образно и размещены в плоскости, параллельной плоскости 2, совпадающей со средним уровнем водной поверхности в спокойном состоянии, так что активные поверхности антенн направлены в сторону нижней поверхности льда.
Обзор участка нижней поверхности льда в пределах сектора обзора производят за заданное число циклов зондирования путем последовательного поворота оси ХН гидроакустической излучающей антенны в плоскости ее наибольшего размера относительно нормали 1.
Для обеспечения беспропускного обзора участка нижней поверхности льда, перед выполнением i-ого цикла зондирования производят измерение угла наклона гидроакустической излучающей антенны 4δαi в плоскости 3 ее наибольшего размера и угла наклона гидроакустической приемной антенны 5δθi в плоскости 7 ее наибольшего размера. Каждый из углов наклона δαi и δθi имеет постоянную составляющую, возникающую при монтаже гидроакустических антенн на автономную буйковую станцию 6, а также переменную составляющую, возникающую из-за подводных течений. Измерение углов наклона гидроакустических антенн может быть выполнено с помощью датчика динамических перемещений, которые применяются для определения положения судна при качке (например, Seatex MRU-5 фирмы Kongsberg).
В i-ом цикле зондирования гидроакустическая излучающая антенна 4 при наклоне оси ХН с учетом коррекции αi-δαi озвучивает акустическими импульсами i-ый участок нижней поверхности льда.
Угол наклона αi для каждого i-oro цикла зондирования определяют по формуле:

где
Δα - шаг изменения угла наклона ХН в излучении,
α0 - начальный угол наклона оси ХН в излучении,
N - число циклов зондирования, требуемых для обзора участка нижней поверхности льда.
Прием отраженных эхо-сигналов в i-ом цикле зондирования производится гидроакустической приемной антенной 5, формирующей статический веер из заданного числа приемных ХН, каждая из которых имеет фиксированный угол наклона оси относительно нормали 1 с учетом коррекции θm-δθi (фиг. 1).
Угол наклона оси приемной ХН θm определяют по формуле:

где
Δθ - шаг изменения угла наклона оси приемной ХН,
θ0- начальный угол наклона оси приемной ХН,
M - число приемных ХН, составляющих статический веер.
Сектор обзора, определяющий размеры обследованного за N циклов зондирования участка ледового поля, учитывая симметрию углов наклона α1=αN и θ1=-θM, составляет - (2αN)×(2θM).
В результате пространственного перекрытия ХН в излучении и веера из M приемных ХН формируется i-ая полоса обзора 10, состоящая из M участков (фиг. 1), каждый из которых является элементом разрешения по пространству.
Ширина ХН гидроакустической излучающей антенны 4 в плоскости 3 составляет (2θM), а в плоскости 7 - Δαиз. Ширина ХН гидроакустической приемной антенны 5 в плоскости 3 составляет Δθпр, а в плоскости 7 - (2αN). Таким образом, угловые размеры элемента разрешения по пространству составляют 
В i-ом цикле зондирования (фиг. 2) для m-ого участка i-ой полосы обзора измеряют расстояние Ri,m от гидроакустической приемной антенны, расположенной на автономной буйковой станции 17, до нижней поверхности льда 14, по амплитуде и фазе эхо-сигналов, принятых m-ой приемной ХН. При этом выполняют известную процедуру (Андреевский Г.Н. Использование фазы эхо-сигналов при измерении толщины льда методом проникающей гидролокации // Труды XI-ой Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики», Санкт-Петербург, 22-24 мая 2012 г. С. 129-130), позволяющую классифицировать тип границы раздела, от которой отразились излученные сигналы, для выработки признака Пi,m, причем Пi,m=0 при наличии границы 12 раздела «вода-воздух» и Пi,m=1 при контакте с нижней поверхностью льда 14, измеряют глубину погружения гидроакустической приемной антенны по данным датчика абсолютного гидростатического давления Hi, выполняют пересчет значений расстояний от гидроакустической приемной антенны до нижней поверхности льда 14 в вертикальное расстояние по формуле:

Корректируют полученные значения hi,m для учета поправки на скорость звука в воде, измеряют толщину погруженной части льда 13:

Производят измерение направления и скорости дрейфа ледового поля известным способом, основанным на использовании эффекта Доплера для гидроакустических волн, и реализованным, например, с помощью четырехлучевого доплеровского гидроакустического лага (Виноградов К.А. и др. Абсолютные и относительные лаги. - Л.: Судостроение, 1990. С. 30).
После выполнения N циклов зондирования полученную информацию (значения толщины погруженной части льда в секторе обзора, направление и скорость дрейфа ледового поля) передают по акустическому каналу связи или по кабелю в систему обработки и отображения данных.
Значения N и М определяют исходя из геометрических размеров и конструкции используемых гидроакустических антенн, а также из требуемых угловых размеров элемента разрешения по пространству, в пределах которого рассчитывается одно значение толщины погруженной части льда, по формулам:

В результате выполнения обзора нижней поверхности льда за N циклов зондирования получают информацию о толщине погруженной части участка ледового поля в пределах сектора обзора - 
Оценим производительность предложенного метода оценки состояния ледового поля.
При размерах сектора обзора  и
и  из формул (5) получаем, что число приемных ХН в статическом веере М=90, а число циклов зондирования, требуемых для обзора участка нижней поверхности льда N=90.
из формул (5) получаем, что число приемных ХН в статическом веере М=90, а число циклов зондирования, требуемых для обзора участка нижней поверхности льда N=90.
Тогда число элементов разрешения по пространству, в пределах каждого из которых рассчитывается толщина погруженной части льда, в секторе обзора  составит N×M=90×90=1800, в то время как в известном способе-прототипе (Fissel et al. Improvements in the detection of hazardous sea ice features using upward looking sonar data // Proceedings of Arctic Technology Conference, USA, 3-5 Dec. 2012) за один цикл зондирования обследуется участок нижней поверхности льда с угловыми размерами 2°×2°.
составит N×M=90×90=1800, в то время как в известном способе-прототипе (Fissel et al. Improvements in the detection of hazardous sea ice features using upward looking sonar data // Proceedings of Arctic Technology Conference, USA, 3-5 Dec. 2012) за один цикл зондирования обследуется участок нижней поверхности льда с угловыми размерами 2°×2°.
Для случая, когда скорость движения ледового поля равна нулю, предложенным способом за N циклов зондирования обследуют сектор обзора 90°×90°, в пределах которого получат 1800 значений толщины погруженной части льда. При использовании известного способа-прототипа размер обследуемого сектора составит 2°×2°.
Прирост производительности оценки состояния ледового поля определяется отношением угловых размеров участков нижней поверхности льда, обследуемых за одинаковое число циклов зондирования известным и предложенным способами, и составляет 
Фактическое значение прироста производительности будет определяться угловыми размерами ХН используемых гидроакустических антенн, числом выполненных циклов зондирования, значениями Δθ и Δα, а также скоростью движения ледового поля.
Таким образом, производительность предложенного метода больше по сравнению с известным способом-прототипом.
Предложенный способ позволяет расширить сектор обзора нижней поверхности льда при сохранении размеров элемента разрешения по пространству, в пределах которого производится оценка погруженной части льда, что существенно повышает производительность оценки состояния ледового поля.
Таким образом, технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения состояния ледяного покрова | 2016 |
|
RU2635332C1 |
| Способ съемки рельефа поверхности | 2020 |
|
RU2757065C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ОСАДКИ, ТОЛЩИНЫ И ВЫСОТЫ ЛЬДА | 2012 |
|
RU2500985C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| Способ съемки рельефа дна акватории | 2021 |
|
RU2757560C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
Использование: гидроакустика, океанография, и может быть использовано для оценки состояния ледового поля. Сущность: способ реализуют с помощью гидроакустических излучающей и приемной антенн, соединенных Т-образно и размещенных в плоскости, параллельной плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, излучение акустических импульсов производят излучающей антенной с характеристикой направленности (ХН), прием эхо-сигналов от нижней поверхности льда производят приемной антенной, формирующей статический веер приемных ХН электронным способом, обзор участка нижней поверхности льда в пределах сектора обзора производят за заданное число циклов зондирования путем последовательного поворота оси ХН излучающей антенны в плоскости ее наибольшего размера относительно нормали к нижней поверхности льда, для каждого положения оси ХН излучающей антенны в полосе обзора измеряют расстояния от приемной антенны до нижней поверхности льда, перед началом каждого цикла зондирования производят измерение и коррекцию углов наклона излучающей и приемной антенн в плоскостях их наибольших размеров. Технический результат: расширение сектора обзора нижней поверхности льда при сохранении размеров элемента разрешения по пространству, в пределах которого производится оценка погруженной части льда. 2 ил.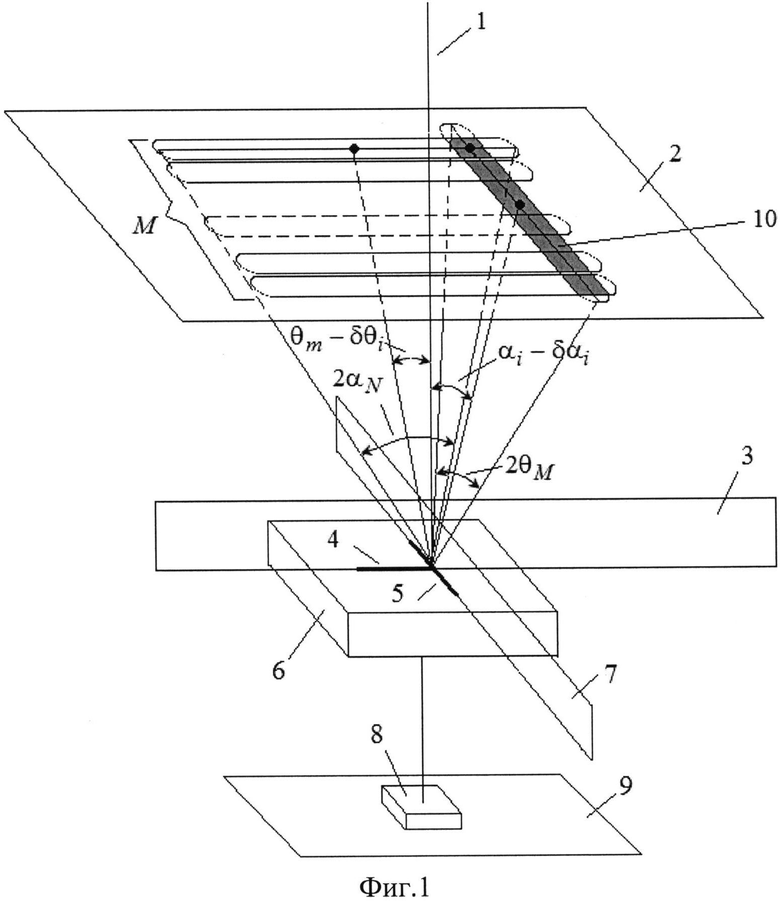
Способ оценки состояния ледового поля, в котором излучают акустические сигналы в сторону нижней поверхности льда с автономной буйковой станции, принимают отраженные эхо-сигналы, производят оценку среднего значения скорости звука в слое воды между точкой излучения и нижней поверхностью льда, выполняют измерение расстояния от точки излучения до нижней поверхности льда h с учетом известного среднего значения скорости звука в воде, классифицируют принятые эхо-сигналы по классам «вода-воздух» и «вода-лед», измеряют глубину погружения точки излучения Н, измеряют толщину погруженной части льда d как d=H-h, измеряют направление и скорость дрейфа ледового поля, передают полученную информацию по акустическому каналу связи или по кабелю в систему обработки и отображения данных, отличающийся тем, что оценку состояния ледового покрова производят с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в плоскости, параллельной плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, так что активные поверхности антенн направлены в сторону нижней поверхности льда, излучение акустических импульсов производят гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в плоскости наибольшего размера гидроакустической приемной антенны, нормальной к плоскости водной поверхности в спокойном состоянии и проходящей через длинную ось симметрии гидроакустической приемной антенны, и узкой - в плоскости наибольшего размера гидроакустической излучающей антенны, нормальной к плоскости водной поверхности в спокойном состоянии и проходящей через длинную ось симметрии гидроакустической излучающей антенны, прием эхо-сигналов от нижней поверхности льда производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом, обзор участка нижней поверхности льда в пределах сектора обзора производят за заданное число циклов зондирования путем последовательного поворота оси ХН гидроакустической излучающей антенны в плоскости ее наибольшего размера относительно нормали к нижней поверхности льда, перед началом каждого цикла зондирования производят измерение угла наклона гидроакустической излучающей антенны в плоскости ее наибольшего размера и угла наклона гидроакустической приемной антенны в плоскости ее наибольшего размера, в каждом цикле зондирования выполняют коррекцию угла наклона оси ХН в излучении в плоскости наибольшего размера гидроакустической излучающей антенны, а также коррекцию углов наклона осей приемных ХН в плоскости наибольшего размера гидроакустической приемной антенны, для каждого положения оси ХН гидроакустической излучающей антенны в полосе обзора измеряют расстояния от гидроакустической приемной антенны до нижней поверхности льда.
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН | 2010 |
|
RU2435136C1 |
| Электромашинный усилитель момента | 1947 |
|
SU70983A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Ферродинамический нулевой индикатор к компенсаторам переменного тока | 1956 |
|
SU107371A1 |
| US5790474 A, 04.08.1998 | |||

