Область техники, к которой относится изобретение
Группа изобретений относится к области регулирования и контроля движения дорожного транспорта и предназначено для измерения габаритной длины транспортных средств и расстояния между ними.
Уровень техники
Измерение габаритной длины транспортного средства (далее - ТС) является актуальной задачей для систем управления дорожным движением, оптимизации транспортных потоков на магистралях, а также для выявления нарушителей правил дорожного движения (далее - ПДД). Попытки решения данной задачи предпринимались многократно. В частности, известно решение с использованием радиолокационного измерителя (www.smartmicrowavesensor.de). Однако эти измерения по утверждению авторов носят оценочный характер и позволяют вести классификацию ТС по 2-3 классам из-за низкой точности измерений.
Известно техническое решение комплекса для измерения габаритной длины транспортных средств (http://www.osilaserscan.com/Products/AutoSense/AutoSense-Overview.aspx), в котором измерение габаритной длины осуществляется с помощью лазерного сканера, позволяющего с высокой точностью измерить как размер ТС, так и расстояние между ними, однако для такого измерения необходима установка измерительной головки над каждой полосой движения, что существенно усложняет процесс установки и обслуживания системы, а также удорожает ее при использовании на многополосных дорогах.
Известен способ определения габаритов ТС с помощью видеокамеры посредством компьютерной обработки получаемого изображения http://www.module.ru/catalog/trafic/trafikmonitore/, являющийся наиболее близким аналогом предлагаемого способа. Сущность способа заключается в получении высококачественного цифрового изображения ТС с помощью видеокамеры и обработка этого изображения на компьютере программой видеоаналитики, позволяющей выявить движущийся объект в поле зрения камеры и определить его габариты, подбирая параллелепипед соответствующего размера и сравнивая его изображение с имеющимся изображением ТС, а также расстояние между передними бамперами движущихся друг за другом автомобилей.
К недостаткам данного способа относится невозможность измерения расстояния дистанции между задним бампером переднего ТС и передним бампером заднего ТС, которое является существенным для обеспечения безопасности на дороге, необходимость использования высокопроизводительного компьютера, обеспечивающего обработку изображений ТС, а также сложность оптических элементов видеокамеры, высокое энергопотребление и, как следствие, высокая цена. Кроме того, данные измерения невозможны при низкой освещенности зоны контроля видеокамеры.
Раскрытие изобретения
Задачей группы изобретений является создание способа и устройства для его реализации, обеспечивающих измерение габаритной длины ТС и дистанции между транспортными средствами при минимальных энергетических и компьютерных затратах, а также упрощение конструкции устройства.
Для решения поставленной задачи предложены способ измерения габаритной длины транспортных средств, способ измерения расстояния между ними и устройство для их реализации.
В предложенном способе измерения габаритной длины движущегося транспортного средства получают изображение транспортного средства с помощью первой видеокамеры, осуществляют компьютерную обработку полученного изображения транспортного средства, однако в отличие от прототипа дополнительно получают изображение транспортного средства с помощью второй видеокамеры, причем первая и вторая видеокамеры размещены с возможностью получения изображения транспортного средства спереди и сзади, измеряют скорость и координаты транспортного средства с помощью радара, вычисляют габаритную длину транспортного средства с использованием данных, полученных с первой и второй видеокамер и радара.
В предпочтительном варианте выполнения способ содержит этапы, на которых:
- выделяют из изображения транспортного средства, полученного с помощью первой видеокамеры, изображение переднего государственного регистрационного знака (далее - ГРЗ) транспортного средства,
- фиксируют момент времени t1, когда изображение переднего ГРЗ получено,
- распознают символы и формат переднего ГРЗ посредством оптического распознавания символов,
- определяют координаты середины переднего ГРЗ в системе координат светочувствительной матрицы,
- определяют скорость и координаты транспортного средства с помощью радара,
- выделяют из изображения транспортного средства, полученного с помощью второй видеокамеры, изображение заднего ГРЗ транспортного средства,
- фиксируют момент времени t2, когда изображение заднего ГРЗ получено,
- определяют координаты середины заднего ГРЗ в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ посредством оптического распознавания символов,
- преобразуют координаты переднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью первой видеокамеры и радара,
- фиксируют номер полосы движения, по которой движется транспортное средство,
- преобразуют координаты заднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью второй видеокамеры и радара
- сравнивают результаты распознавания переднего и заднего ГРЗ транспортного средства и фиксируют случаи совпадения этих результатов,
- определяют длину транспортного средства по результатам определения координат его переднего и заднего ГРЗ в плоскости дороги с учетом измеренной радаром скорости для всех случаев совпадения передних и задних ГРЗ, используя выражение
где L - длина транспортного средства,
t1, t2 - моменты фиксации переднего и заднего ГРЗ данного транспортного средства первой и второй видеокамерами соответственно,
V - скорость транспортного средства.
d=X1-X2,
где X1 и X2 - мгновенные координаты переднего и заднего ГРЗ данного транспортного средства, изображения которых получены первой и второй видеокамерами соответственно.
Измерение длины транспортного средства предпочтительно производят многократно, при каждой фиксации изображения его переднего и заднего ГРЗ контроля первой и второй видеокамер, при этом каждый результат измерений корректируют с учетом особенностей размещения ГРЗ на транспортном средстве, длину транспортного средства получают посредством усреднения данных, полученных при многократных измерениях.
По результатам многократных измерений скорости в зоне контроля первой видеокамеры и радара можно строить экстраполяцию зависимости скорости от времени на интервале времени t1-t2, используя гладкую функцию.
В другом предпочтительном варианте, соответствующем движению транспортного средства в противоположном направлении, изображение переднего ГРЗ транспортного средства получают с помощью второй видеокамеры, а изображение заднего ГРЗ транспортного средства получают с помощью первой камеры, определение координат заднего ГРЗ в пространстве сенсора первой видеокамеры производят с помощью радара, зона контроля которого совмещена с зоной контроля первой видеокамеры,
- выделяют из изображения транспортного средства, полученного с помощью второй видеокамеры, изображение переднего ГРЗ транспортного средства,
- фиксируют момент времени t1, когда изображение переднего ГРЗ получено,
- распознают символы и формат переднего ГРЗ посредством оптического распознавания символов,
- определяют координаты середины переднего ГРЗ в системе координат светочувствительной матрицы,
- определяют скорость и координаты транспортного средства с помощью радара,
- выделяют из изображения ТС, полученного с помощью первой видеокамеры, изображение заднего ГРЗ транспортного средства,
- фиксируют момент времени t2, когда изображение заднего ГРЗ получено,
- определяют координаты середины заднего ГРЗ в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ посредством оптического распознавания символов,
- преобразуют координаты переднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью второй видеокамеры и радара,
- фиксируют номер полосы движения, по которой движется транспортное средство,
- преобразуют координаты заднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью первой видеокамеры и радара,
- сравнивают результаты распознавания переднего и заднего ГРЗ транспортного средства и фиксируют случаи совпадения этих результатов,
- определяют длину транспортного средства по результатам определения координат его переднего и заднего ГРЗ в плоскости дороги, с учетом измеренной радаром скорости для всех случаев совпадения передних и задних ГРЗ, используя выражение
где L - длина транспортного средства,
t1, t2 - моменты фиксации переднего и заднего ГРЗ данного транспортного средства первой и второй видеокамерами соответственно,
V - скорость транспортного средства.
d=X1-X2,
где X1 и X2 - мгновенные координаты переднего и заднего ГРЗ данного транспортного средства, изображения которых получены первой и второй видеокамерами соответственно.
Далее раскрывается способ измерения расстояния между транспортными средствами, движущимися по дороге один за другим, в котором получают изображение первого и второго транспортных средств с помощью видеокамеры, осуществляют компьютерную обработку полученного изображения транспортных средств с получением расстояния между первым транспортным средством и вторым транспортным средством. Способ отличается от известных тем, что получают изображения первого и второго транспортных средств с помощью двух, первой и второй, видеокамер, размещенных с возможностью получения изображений транспортных средств спереди и сзади, измеряют скорость и координаты транспортных средств с помощью радара, вычисляют расстояние, соответствующее дистанции между первым и вторым транспортными средствами с использованием полученных данных.
В предпочтительном варианте осуществления способ содержит этапы, на которых:
- получают изображение заднего ГРЗ первого транспортного средства с помощью второй видеокамеры,
- фиксируют момент времени t2, когда изображение заднего ГРЗ первого транспортного средства получено,
- определяют координаты середины заднего ГРЗ первого транспортного средства в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ первого транспортного средства посредством оптического распознавания символов,
- получают изображение переднего ГРЗ второго транспортного средства, двигающегося следом за первым транспортным средством, посредством первой видеокамеры,
- фиксируют момент времени, когда изображение переднего ГРЗ второго транспортного средства получено,
- определяют координаты середины переднего ГРЗ второго транспортного средства в системе координат светочувствительной матрицы первой видеокамеры,
- распознают символы и формат переднего ГРЗ второго транспортного средства посредством оптического распознавания символов,
- определяют скорость и координаты второго транспортного средства с помощью радара,
- фиксируют номер полосы движения, по которой движется второе транспортное средство,
- преобразуют координаты заднего ГРЗ первого транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении первого транспортного средства, полученных с помощью второй видеокамеры и радара,
- определяют расстояние, соответствующее дистанции между первым и вторым транспортными средствами, по имеющимся данным для случая, когда второе транспортное средство двигается по той же полосе движения, что и первое транспортное средство, используя выражение:

где S - расстояние между двумя следующими один за другим транспортными средствами,
X1 - координата заднего ГРЗ первого транспортного средства в момент его фиксации второй видеокамерой,
X2 - координата переднего ГРЗ второго транспортного средства в момент его фиксации первой видеокамерой,
t1 - время фиксации заднего ГРЗ первого транспортного средства второй видеокамерой,
t2 - время фиксации переднего ГРЗ второго транспортного средства первой видеокамерой.
В предпочтительном варианте измерение расстояния между первым и вторым транспортными средствами производят многократно, при каждой фиксации изображения их ГРЗ в зоне контроля первой и второй видеокамер, каждый результат измерений корректируют с учетом особенностей размещения ГРЗ на транспортном средстве, а расстояние между первым и вторым транспортными средствами получают посредством усреднения данных, полученных при многократных измерениях.
По результатам многократных измерений скорости в зоне контроля первой видеокамеры и радара можно строить экстраполяцию зависимости скорости от времени на интервале времени t1-t2, используя гладкую функцию.
В другом предпочтительном варианте, соответствующем движению транспортного потока в противоположном направлении, изображение заднего ГРЗ первого транспортного средства получают с помощью первой видеокамеры, а изображение переднего ГРЗ второго транспортного средства получают с помощью второй камеры, определение координат переднего ГРЗ второго ТС в пространстве сенсора второй видеокамеры производят с помощью радара,
- получают изображение заднего ГРЗ первого транспортного средства с помощью первой видеокамеры,
- фиксируют момент времени t2, когда изображение заднего ГРЗ первого транспортного средства получено,
- определяют координаты середины заднего ГРЗ первого транспортного средства в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ первого транспортного средства посредством оптического распознавания символов,
- получают изображение переднего ГРЗ второго транспортного средства, двигающегося следом за первым транспортным средством, посредством второй видеокамеры,
- фиксируют момент времени, когда изображение переднего ГРЗ второго транспортного средства получено,
- определяют координаты середины переднего ГРЗ второго транспортного в системе координат светочувствительной матрицы второй видеокамеры,
- распознают символы и формат переднего ГРЗ второго транспортного посредством оптического распознавания символов,
- определяют скорость и координаты второго транспортного средства с помощью радара,
- фиксируют номер полосы движения, по которой движется второе транспортное средство,
- преобразуют координаты заднего ГРЗ первого транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении первого транспортного средства, полученных с помощью первой видеокамеры и радара,
- определяют расстояние, соответствующее дистанции между первым и вторым транспортными средствами, по полученным данным в случае, если второе транспортное средство двигается по той же полосе движения, что и первое транспортное средство, используя выражение:

где S - расстояние между двумя следующими один за другим транспортными средствами,
X1 - координата заднего ГРЗ первого транспортного средства в момент его фиксации первой видеокамерой,
Х2 - координата переднего ГРЗ второго транспортного средства в момент его фиксации второй видеокамерой,
t1 - время фиксации заднего ГРЗ первого транспортного средства первой видеокамерой,
t2 - время фиксации переднего ГРЗ второго транспортного средства второй видеокамерой.
Предложено устройство определения габаритной длины транспортного средства и расстояния между двумя движущимися друг за другом транспортными средствами, содержащее видеоблок с первой видеокамерой и блок управления и обработки данных. В отличие от известных оно дополнительно содержит радар, а видеоблок дополнительно содержит вторую видеокамеру, установленную под углом к первой видеокамере таким образом, чтобы одна из видеокамер обеспечивала получение изображения транспортного средства спереди, а вторая - сзади.
В предпочтительном варианте блок управления и обработки данных выполнен с возможностью распознавания ГРЗ на изображениях транспортных средств, полученных первой и второй видеокамерами, а также определения координат этих ГРЗ в плоскости дороги посредством привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительных матриц этих видеокамер с помощью радара.
В предпочтительном варианте радар расположен так, что его зона контроля совмещена с зоной контроля первой или второй видеокамеры.
Радар предпочтительно выполнен с возможностью измерения скорости, дальности и азимута транспортного средства.
Блок управления предпочтительно выполнен с возможностью расчета длины проходящих по дороге транспортных средств, а также расстояния, соответствующего дистанции между ними посредством использования данных, полученных радаром, а также данных, полученных в процессе фиксации ГРЗ первой и второй видеокамерами с помощью выражений:
L=(t1-t2)×V-d,
где L - длина транспортного средства,
t1, t2 - моменты фиксации переднего и заднего ГРЗ данного транспортного средства первой и второй видеокамерами соответственно,
V - скорость транспортного средства,
d=X1-X2,
где X1 и X2 - мгновенные координаты переднего и заднего ГРЗ данного транспортного средства, изображения которых получены первой и второй видеокамерами соответственно.
S=X1-X2+(t1-t2)·V,
где S - расстояние между двумя следующими один за другим транспортными средствами,
X1 - координата заднего ГРЗ первого транспортного средства в момент его фиксации первой видеокамерой,
X2 - координата переднего ГРЗ второго транспортного средства в момент его фиксации второй видеокамерой,
t1 - время фиксации заднего ГРЗ второго ГРЗ первого транспортного средства первой видеокамерой,
t2 - время фиксации переднего ГРЗ первого ГРЗ второго транспортного средства второй видеокамерой.
Сущность способа заключается в одновременном или последовательном (с небольшим интервалом времени) распознавании переднего и заднего ГРЗ данного транспортного средства с последующим вычислением расстояния между ними посредством использования сведений о координатах переднего и заднего ГРЗ, которые определяются в процессе выполнения процедуры распознавания. Способ заключается в определении координат одного из ГРЗ транспортного средства, его распознавании, определении координат другого ГРЗ, его распознавании, сравнении результатов распознавания и, в случае совпадения этих результатов, вычислении разности координат, которая позволяет оценить длину всех транспортных средств, ГРЗ которых были распознаны. Данный способ применим в случае, если передний и задний ГРЗ распознаны одновременно. Если же между распознаванием двух ГРЗ транспортного средства имеется небольшой временной интервал, то для точного определения длины транспортного средства необходимо учитывать его скорость. Ограничения на величину допустимого интервала времени носят рекомендательный характер. Для точного измерения длины важно лишь, чтобы в течение этого интервала времени скорость транспортного средства изменилась незначительно. Кроме того, способ обеспечивает возможность достоверного измерения дистанции между автомобилями, двигающимися в одном направлении.
Для повышения достоверности измерений и сокращения объема вычислений поиск изображения второго ГРЗ производится не по всей зоне контроля второй камеры, а только вдоль траектории, которая экстраполирована в зону второй телекамеры из результатов, полученных первой камерой. Такое уточнение позволяет также проводить измерения автопоездов, имеющих спереди и сзади различные ГРЗ. В качестве признака длинномерного ТС могут также использоваться автоматически распознаваемые обозначения, размещаемые спереди и сзади ТС.
Краткое описание чертежей
На Фиг. 1 представлена блок-схема комплекса для реализации способа.
На Фиг. 2 представлена схема расположения видеокамер устройства, при котором видеокамеры имеют различные зоны контроля.
На Фиг. 3 представлена схема такого расположения видеокамер устройства, при котором видеокамеры имеют общую зону контроля.
Осуществление изобретения
Устройство на Фиг. 1 представляет собой фоторадарный датчик 1, содержащий первую видеокамеру 2, радиолокатор (радар) 3, процессорный модуль 4 и прожектор 5 для подсветки, дополнительно оснащенный соединенной с процессорным модулем 4 второй видеокамерой 6 с прожектором 7 для распознавания второго ГРЗ данного ТС. Первая видеокамера 2 и радар 3 установлены таким образом, что их зоны контроля совмещены. Конструктивно вторая видеокамера 6 связана с первой видеокамерой 2 фоторадарного датчика 1, а углы ее установки по отношению к дороге имеют заданные фиксированные значения, которые учитываются в процессорном модуле 4 при расчете параметров траектории ТС. Устройство устанавливается рядом с дорожным полотном (или над ним) одним из способов, показанных на Фиг. 2 и 3.
Устройство работает следующим образом.
1. Измерение длины ТС.
Фоторадарный датчик 1 определяет скорость, координаты ГРЗ, фиксирует момент времени этого события, производит распознавание ГРЗ ТС в зоне контроля первой видеокамеры 2. Затем ТС попадает в зону контроля второй видеокамеры 6, изображение с которой также поступает на процессорный модуль 4 фоторадарного датчика. Процессорный модуль 4 производит определение координат, фиксирует момент времени этого события, распознает ГРЗ на изображении ТС, полученном второй видеокамерой 6, сравнивает результаты распознавания ГРЗ, полученные первой и второй видеокамерой, и при их совпадении производит вычисление длины ТС по формуле

где t1, t2 - моменты фиксации переднего и заднего ГРЗ данного ТС,
V - скорость ТС, измеренная радиолокатором фоторадарного датчика,

где X1 и Х2 - мгновенные координаты переднего и заднего номеров данного ТС, изображения которых получены первой и второй видеокамерами соответственно.
2. Измерение расстояния между двумя транспортными средствами.
Расстояние (дистанция) S между транспортными средствами, движущимися друг за другом, определяется по разности координат X1 и X2 их ГРЗ, полученных с помощью первой и второй видеокамер, расположенных так, как показано на Фиг. 2.
Обозначим через ТС1 транспортное средство, идущее впереди, а через ТС2 - транспортное средство, идущее сзади. В момент фиксации ГРЗ первой видеокамерой 2 происходит измерение скорости ТС радиолокатором, зона контроля которого совмещена с зоной контроля первой видеокамеры 2.
Тогда расстояние (дистанция) S между ними определится из выражения

где X1 - координата заднего ГРЗ ТС1 в момент его фиксации первой видеокамерой,
X2 - координата переднего ГРЗТС2 в момент его фиксации второй видеокамерой,
V - скорость ТС1 в момент фиксации его заднего ГРЗ первой видеокамерой,.
t1 - время фиксации заднего ГРЗ ТС1 первой видеокамерой,
t2 - время фиксации переднего ГРЗ ТС2 второй видеокамерой.
Легко видеть, что в случае, если фиксация ГРЗ движущихся друг за другом ТС происходит одновременно первой видеокамерой и второй видеокамерой, то

и выражения (3) и (4) упрощаются до

Для повышения точности измерений имеется возможность многократной проверки и усреднения полученных результатов, поскольку в зоне контроля каждой из видеокамер номерные знаки автомобилей фиксируются по нескольку раз.
При двухстороннем движении система позволяет одновременно контролировать ТС, двигающиеся в обоих направлениях.
Допустим, для ТС1 фиксация переднего ГРЗ произошла в момент времени t1, а его длина (измеренная после прохождения им зоны контроля второй видеокамеры) равна L. Тогда измерение расстояния между ТС может быть выполнено с помощью выражения

где T1 - время фиксации переднего номерного знака ТС1 первой видеокамерой,
T2 - время фиксации переднего номерного знака ТС2 первой видеокамерой,
L - длина автомобиля, идущего впереди (ТС1),
X1 - координата переднего ГРЗ ТС1 в момент фиксации T1 в зоне контроля первой видеокамеры,
X2 - координата переднего ГРЗ ТС2 в момент фиксации T2 в зоне контроля первой видеокамеры.
Описанный способ может быть также реализован посредством встречной установки на некотором расстоянии двух видеокамер с системой распознавания ГРЗ так, чтобы зоны контроля этих видеокамер пересекались (Фиг. 3).
Измерение длины ТС в этом случае происходит следующим образом. Передний ГРЗ проходящего ТС попадет в зону контроля одной видеокамеры, а его задний ГРЗ попадет в зону контроля другой видеокамеры. Связь видеокамер с процессорным модулем позволяет произвести фиксацию и распознавание этих ГРЗ. Очевидно, что в общем случае встречное расположение видеокамер не гарантирует одновременности распознавания переднего и заднего ГРЗ. Знание моментов времени распознавания переднего и заднего ГРЗ позволяет определить габаритную длину ТС с помощью выражения (1). Вычисление производится в процессорном блоке 4.
Легко видеть, что в случае, если фиксация переднего и заднего ГРЗ происходит одновременно первой видеокамерой 2 и второй видеокамерой 6, то
t1=t2,
и выражение (1) упрощается до
S=X1-X2.
Аналогичным образом двумя видеокамерами может быть измерено и расстояние между движущимися друг за другом ТС. В этом случае сравнению подлежат координаты заднего ГРЗ ТС, идущего впереди, и координаты переднего ГРЗ ТС, идущего следом за первым.
Таким образом, заявленная группа изобретений позволяет получить технический результат, заключающийся в обеспечении измерения габаритной длины транспортных средств и дистанции между транспортными средствами при минимальных энергетических и компьютерных затратах, а также упрощение конструкции устройства измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВИДЕОФИКСАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2539676C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| РАДИОЛОКАЦИОННЫЙ ВИДЕОФИКСИРУЮЩИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ТРАНСПОРТА И СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛИ-НАРУШИТЕЛЯ | 2010 |
|
RU2472227C2 |
| МНОГОЦЕЛЕВОЙ МНОГОПОЛОСНЫЙ ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТА С ВИДЕОФИКСАЦИЕЙ | 2017 |
|
RU2658120C1 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2579645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
Группа изобретений относится к области регулирования и контроля движения дорожного транспорта и предназначено для измерения габаритной длины транспортных средств (далее - ТС) и расстояния между ними. В предложенном способе измерения габаритной длины движущегося ТС и устройстве, реализующем заявленный способ, получают изображение ТС с помощью первой видеокамеры, осуществляют компьютерную обработку полученного изображения ТС. При этом получают изображение ТС с помощью второй видеокамеры, причем первая и вторая видеокамеры размещены с возможностью получения изображения ТС спереди и сзади, измеряют скорость и координаты ТС с помощью радара, вычисляют габаритную длину ТС с использованием данных, полученных с первой и второй видеокамер и радара. В способе измерения расстояния между транспортными средствами, движущимися по дороге один за другим, получают изображение первого и второго ТС с помощью первой видеокамеры, осуществляют компьютерную обработку полученного изображения ТС с получением расстояния между первым и вторым ТС. Далее получают изображения первого и второго ТС с помощью первой и второй видеокамер, размещенных с возможностью получения изображений ТС спереди и сзади, измеряют скорость и координаты ТС с помощью радара и вычисляют дистанцию между первым и вторым ТС с использованием полученных данных. Технический результат - обеспечение измерения габаритной длины транспортных средств и дистанции между транспортными средствами при минимальных энергетических и компьютерных затратах. 3 н. и 12 з.п. ф-лы, 3 ил.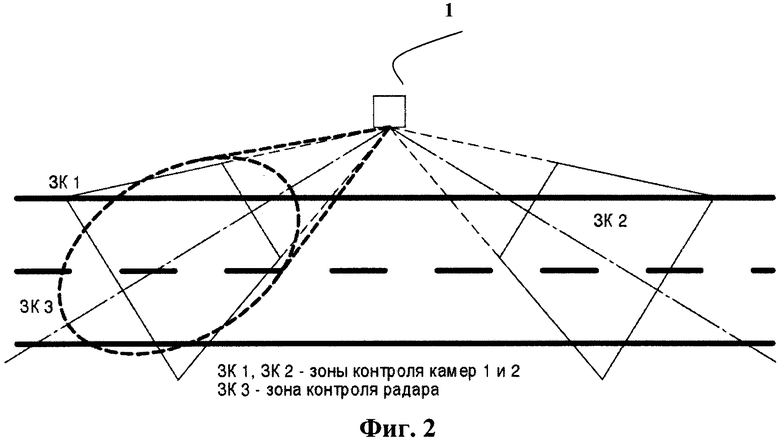
1. Способ измерения габаритной длины движущегося транспортного средства, в котором:
- получают изображение транспортного средства с помощью первой видеокамеры,
- осуществляют компьютерную обработку полученного изображения транспортного средства,
отличающийся тем, что
- дополнительно получают изображение транспортного средства с помощью второй видеокамеры, причем первая и вторая видеокамеры размещены с возможностью получения изображения транспортного средства спереди и сзади,
- измеряют скорость и координаты транспортного средства с помощью радара,
- вычисляют габаритную длину транспортного средства с использованием данных, полученных с первой и второй видеокамер и радара.
2. Способ по п. 1, отличающийся тем, что
- выделяют из изображения транспортного средства, полученного с помощью первой видеокамеры, изображение переднего государственного регистрационного знака (ГРЗ) транспортного средства,
- фиксируют момент времени t1, когда изображение переднего ГРЗ получено,
- распознают символы и формат переднего ГРЗ посредством оптического распознавания символов,
- определяют координаты середины переднего ГРЗ в системе координат светочувствительной матрицы,
- определяют скорость и координаты транспортного средства с помощью радара,
- выделяют из изображения транспортного средства, полученного с помощью второй видеокамеры, изображение заднего ГРЗ транспортного средства,
- фиксируют момент времени t2, когда изображение заднего ГРЗ получено,
- определяют координаты середины заднего ГРЗ в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ посредством оптического распознавания символов,
- преобразуют координаты переднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью первой видеокамеры и радара,
- фиксируют номер полосы движения, по которой движется транспортное средство,
- преобразуют координаты заднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью второй видеокамеры и радара,
- сравнивают результаты распознавания переднего и заднего ГРЗ транспортного средства и фиксируют случаи совпадения этих результатов,
- определяют длину транспортного средства по результатам определения координат его переднего и заднего ГРЗ в плоскости дороги, с учетом измеренной радаром скорости для всех случаев совпадения передних и задних ГРЗ, используя выражение

где L - длина транспортного средства,
t1, t2 - моменты фиксации переднего и заднего ГРЗ данного транспортного средства первой и второй видеокамерами соответственно,
V - скорость транспортного средства,
d=X1-X2,
где X1 и X2 - мгновенные координаты переднего и заднего ГРЗ данного транспортного средства, изображения которых получены первой и второй видеокамерами соответственно.
3. Способ по п. 1, отличающийся тем, что
- измерение длины транспортного средства производят многократно, при каждой фиксации изображения его переднего и заднего ГРЗ контроля первой и второй видеокамер,
- каждый результат измерений корректируют с учетом особенностей размещения ГРЗ на транспортном средстве,
- длину транспортного средства получают посредством усреднения данных, полученных при многократных измерениях.
4. Способ по п. 3, отличающийся тем, что по результатам многократных измерений скорости в зоне контроля первой видеокамеры и радара строят экстраполяцию зависимости скорости от времени на интервале времени t1-t2, используя гладкую функцию.
5. Способ по п. 1, отличающийся тем, что
- изображение переднего ГРЗ транспортного средства получают с помощью второй видеокамеры, а изображение заднего ГРЗ транспортного средства получают с помощью первой камеры, определение координат переднего ГРЗ в пространстве сенсора второй видеокамеры производят с помощью радара, зона контроля которого совмещена с зоной контроля второй видеокамеры,
- выделяют из изображения транспортного средства, полученного с помощью второй видеокамеры, изображение переднего ГРЗ транспортного средства,
- фиксируют момент времени t1, когда изображение переднего ГРЗ получено,
- распознают символы и формат переднего ГРЗ посредством оптического распознавания символов,
- определяют координаты середины переднего ГРЗ в системе координат светочувствительной матрицы,
- определяют скорость и координаты транспортного средства с помощью радара,
- выделяют из изображения ТС, полученного с помощью первой видеокамеры, изображение заднего ГРЗ транспортного средства,
- фиксируют момент времени t2, когда изображение заднего ГРЗ получено,
- определяют координаты середины заднего ГРЗ в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ посредством оптического распознавания символов,
- преобразуют координаты переднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью второй видеокамеры и радара,
- фиксируют номер полосы движения, по которой движется транспортное средство,
- преобразуют координаты заднего ГРЗ транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении транспортного средства, полученных с помощью первой видеокамеры и радара,
- сравнивают результаты распознавания переднего и заднего ГРЗ транспортного средства и фиксируют случаи совпадения этих результатов,
- определяют длину транспортного средства по результатам определения координат его переднего и заднего ГРЗ в плоскости дороги, с учетом измеренной радаром скорости для всех случаев совпадения передних и задних ГРЗ, используя выражение
где L - длина транспортного средства,
t1, t2 - моменты фиксации переднего и заднего ГРЗ данного транспортного средства первой и второй видеокамерами соответственно,
V - скорость транспортного средства,
d=X1-X2,
где X1 и X2 - мгновенные координаты переднего и заднего ГРЗ данного транспортного средства, изображения которых получены первой и второй видеокамерами соответственно.
6. Способ измерения расстояния между транспортными средствами, движущимися по дороге один за другим, в котором:
- получают изображение первого и второго транспортных средств с помощью первой видеокамеры,
- осуществляют компьютерную обработку полученного изображения транспортных средств с получением расстояния между первым транспортным средством и вторым транспортным средством,
отличающийся тем, что
- получают изображения первого и второго транспортных средств с помощью двух, первой и второй, видеокамер, размещенных с возможностью получения изображений транспортных средств спереди и сзади,
- измеряют скорость и координаты транспортных средств с помощью радара,
- вычисляют расстояние, соответствующее дистанции между первым и вторым транспортными средствами с использованием полученных данных.
7. Способ по п. 6, отличающийся тем, что
- получают изображение заднего ГРЗ первого транспортного средства с помощью второй видеокамеры,
- фиксируют момент времени t2, когда изображение заднего ГРЗ первого транспортного средства получено,
- определяют координаты середины заднего ГРЗ первого транспортного средства в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ первого транспортного средства посредством оптического распознавания символов,
- получают изображение переднего ГРЗ второго транспортного средства, двигающегося следом за первым транспортным средством, посредством первой видеокамеры,
- фиксируют момент времени, когда изображение переднего ГРЗ второго транспортного средства получено,
- определяют координаты середины переднего ГРЗ второго транспортного средства в системе координат светочувствительной матрицы первой видеокамеры,
- распознают символы и формат переднего ГРЗ второго транспортного средства посредством оптического распознавания символов,
- определяют скорость и координаты второго транспортного средства с помощью радара,
- фиксируют номер полосы движения, по которой движется второе транспортное средство,
- преобразуют координаты заднего ГРЗ первого транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении первого транспортного средства, полученных с помощью второй видеокамеры и радара,
- определяют расстояние, соответствующее дистанции между первым и вторым транспортными средствами, по имеющимся данным в случае, если второе транспортное средство двигается по той же полосе движения, что и первое транспортное средство, используя выражение

где S - расстояние между двумя следующими один за другим транспортными средствами,
X1 - координата заднего ГРЗ первого транспортного средства в момент его фиксации второй видеокамерой,
X2 - координата переднего ГРЗ второго транспортного средства в момент его фиксации первой видеокамерой,
t1 - время фиксации заднего ГРЗ первого транспортного средства второй видеокамерой,
t2 - время фиксации переднего ГРЗ второго транспортного средства первой видеокамерой.
8. Способ по п. 6, отличающийся тем, что
- измерение расстояния между первым и вторым транспортными средствами производят многократно, при каждой фиксации изображения их ГРЗ в зоне контроля первой и второй видеокамер,
- каждый результат измерений корректируют с учетом особенностей размещения ГРЗ на транспортном средстве,
- расстояние между первым и вторым транспортными средствами получают посредством усреднения данных, полученных при многократных измерениях.
9. Способ по п. 8, отличающийся тем, что по результатам многократных измерений скорости в зоне контроля первой видеокамеры и радара строят экстраполяцию зависимости скорости от времени на интервале времени t1-t2, используя гладкую функцию.
10. Способ по п. 6, отличающийся тем, что
- изображение заднего ГРЗ первого транспортного средства получают с помощью первой видеокамеры, а изображение переднего ГРЗ второго транспортного средства получают с помощью второй камеры, определение координат переднего ГРЗ второго ТС в пространстве сенсора второй видеокамеры производят с помощью радара,
- получают изображение заднего ГРЗ первого транспортного средства с помощью первой видеокамеры,
- фиксируют момент времени t2, когда изображение заднего ГРЗ первого транспортного средства получено,
- определяют координаты середины заднего ГРЗ первого транспортного средства в системе координат светочувствительной матрицы,
- распознают символы и формат заднего ГРЗ первого транспортного средства посредством оптического распознавания символов,
- получают изображение переднего ГРЗ второго транспортного средства, двигающегося следом за первым транспортным средством, посредством второй видеокамеры,
- фиксируют момент времени, когда изображение переднего ГРЗ второго транспортного средства получено,
- определяют координаты середины переднего ГРЗ второго транспортного в системе координат светочувствительной матрицы второй видеокамеры,
- распознают символы и формат переднего ГРЗ второго транспортного посредством оптического распознавания символов,
- определяют скорость и координаты второго транспортного средства с помощью радара,
- фиксируют номер полосы движения, по которой движется второе транспортное средство,
- преобразуют координаты заднего ГРЗ первого транспортного средства из системы координат светочувствительной матрицы в систему координат зоны контроля в плоскости дороги посредством совместного использования данных о положении первого транспортного средства, полученных с помощью первой видеокамеры и радара,
- определяют расстояние, соответствующее дистанции между первым и вторым транспортными средствами, по полученным данным в случае, если второе транспортное средство двигается по той же полосе движения, что и первое транспортное средство, используя выражение:

где S - расстояние между двумя следующими один за другим транспортными средствами,
X1 - координата заднего ГРЗ первого транспортного средства в момент его фиксации первой видеокамерой,
X2 - координата переднего ГРЗ второго транспортного средства в момент его фиксации второй видеокамерой,
t1 - время фиксации заднего ГРЗ первого транспортного средства первой видеокамерой,
t2 - время фиксации переднего ГРЗ второго транспортного средства второй видеокамерой.
11. Устройство определения габаритной длины транспортного средства и расстояния между двумя движущимися друг за другом транспортными средствами, содержащее видеоблок с первой видеокамерой, и блок управления и обработки данных, отличающееся тем, что оно дополнительно содержит радар, а видеоблок дополнительно содержит вторую видеокамеру, установленную под углом к первой видеокамере таким образом, чтобы одна из видеокамер обеспечивала получение изображения транспортного средства спереди, а вторая - сзади.
12. Устройство по п. 11, отличающееся тем, что блок управления и обработки данных выполнен с возможностью распознавания ГРЗ на изображениях транспортных средств, полученных первой и второй видеокамерами, а также определения координат этих ГРЗ в плоскости дороги посредством привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительных матриц этих видеокамер с помощью радара.
13. Устройство по п. 11, отличающееся тем, что радар расположен так, что его зона контроля совмещена с зоной контроля первой или второй видеокамеры.
14. Устройство по п. 11, отличающееся тем, что радар выполнен с возможностью измерения скорости, дальности и азимута транспортного средства.
15. Устройство по п. 11, отличающееся тем, что блок управления выполнен с возможностью расчета длины проходящих по дороге транспортных средств, а также расстояния, соответствующего дистанции между ними посредством использования данных, полученных радаром, а также данных, полученных в процессе фиксации ГРЗ первой и второй видеокамерами с помощью выражений;
L=(t1-t2)×V-d,
где L - длина транспортного средства,
t1, t2 - моменты фиксации переднего и заднего ГРЗ данного транспортного средства первой и второй видеокамерами соответственно,
V - скорость транспортного средства,
d=X1-X2,
где X1 и X2 - мгновенные координаты переднего и заднего ГРЗ данного транспортного средства, изображения которых получены первой и второй видеокамерами соответственно.
S=X1-X2+(t1-t2)·V,
где S - расстояние между двумя следующими один за другим транспортными средствами,
X1 - координата заднего ГРЗ первого транспортного средства в момент его фиксации первой видеокамерой,
X2 - координата переднего ГРЗ второго транспортного средства в момент его фиксации второй видеокамерой,
t1 - время фиксации заднего ГРЗ второго ГРЗ первого транспортного средства первой видеокамерой,
t2 - время фиксации переднего ГРЗ первого ГРЗ второго транспортного средства второй видеокамерой.
| Газовая горелка для водоподогревателей проточного типа | 1956 |
|
SU113398A1 |

