Настоящее изобретение относится к системе управления тормозами для моторного транспортного средства. В частности, хотя и не исключительно, оно относится к системе управления тормозами, которая способствует управлению моторным транспортным средством при движении по склону. Аспекты изобретения относятся к системе, к способу и к транспортному средству.
Существует ряд известных систем управления тормозами, которые способствуют управлению движением моторных транспортных средств по склонам.
В документе ЕР 0784551 B1 раскрыта система управления тормозами, содержащая режим спуска с холма, в частности, для транспортных средств, используемых в условиях бездорожья. Система управления тормозами содержит электронный модуль управления и систему управления тормозами для управления тормозами, ассоциированными с каждым из колес транспортного средства. Интерфейс водителя в форме переключателя используется для перехода модуля управления в режим спуска с холма, когда на транспортном средстве также детектируется включенная передача. В этом режиме модуль управления управляет скоростью транспортного средства, выполняя торможение для замедления транспортного средства, когда детектируемая скорость транспортного средства выше, чем заданная целевая скорость.
При движении моторного транспортного средства в условиях бездорожья может понадобиться остановиться на склоне. В этом контексте в EP 1777133 A1 раскрыта система управления тормозами, в которой средство управления тормозами выполнено с возможностью детектировать, когда транспортное средство неподвижно и удерживается на склоне, благодаря усилию торможения, подаваемому на тормоза в соответствии с операцией средства команды торможения (такого как педаль тормоза). Высвобождением усилия торможения управляют, как функцией крутизны наклона после операции, выполненной средством команды торможения отпустить тормоза.
В то время как система управления тормозами в соответствии с документом EP 1777133 A1 определенной степени помогает плавному переходу из неподвижного состояния в режим спуска с холма, она не осуществляет управление транспортным средством во время спуска с холма. Система, в соответствии с документом EP 1777133 A1, конечно, может использоваться совместно с системой EP 0784551 B1, но она все еще может привести к движению рывками (и поэтому в известной степени, неуправляемому движению) при спуске с холма в некоторых обстоятельствах, например, если транспортное средство набирает скорость после отпускания тормозов системой по EP 1777133 A1, и затем должно следовать сильное торможение, в случае превышения целевой скорости, в соответствии с системой EP 0784551 B1.
Задачей настоящего изобретения является создание улучшенной системы управления тормозами, которая преодолевает или сводит к минимуму описанную выше проблему. Другие задачи и преимущества в соответствии с изобретением будут понятны из следующего описания, формулы изобретения и чертежей.
Аспекты изобретения, поэтому, направлены на систему, способ и транспортное средство, как заявлено в приложенной формуле изобретения.
В соответствии с другим аспектом изобретения, защита которого испрашивается, предусмотрена система управления тормозами для моторного транспортного средства, имеющего множество колес, тормоза для приложения усилия торможения к одному или больше из колес и средство, чувствительное к движению, предназначенное для детектирования движения транспортного средства, система, содержащая: средство активации тормозов, предназначенное для активации тормозов, для передачи усилия торможения; и средство управления тормозами, предназначенное для управления средством активации тормозов, в котором средство управления тормозами выполнено с возможностью определения ускорения транспортного средства на основе движения, детектируемого средством, чувствительным к движению, и для обеспечения того, что средство активации тормозов будет передавать усилие торможения, если определенное ускорение превышает установленный предел ускорения.
Благодаря тому, что средство активации тормозов подает усилие торможения, когда ускорение транспортного средства превышает установленный предел ускорения, система, в соответствии с изобретением, обеспечивает постоянный плавный спуск с холма, улучшая, таким образом, управление транспортным средством.
Предпочтительно, средство управления тормозами может быть выполнено с возможностью определения ускорения транспортного средства на основе движения транспортного средства, детектируемого в течение определенного цикла времени, предпочтительно 100 миллисекунд или меньше. Конечно, ускорение транспортного средства, предпочтительно, определяется непрерывно, в то время как система активируется, например, на основе множества циклов времени, каждый из которых, предпочтительно, составляет 100 миллисекунд или меньше, более предпочтительно 50 миллисекунд или меньше, наиболее предпочтительно 20 миллисекунд или меньше. Более короткие циклы времени ведут к более точному и более быстрому определению ускорения и, следовательно, более точному и более быстрому отклику торможения, что, в свою очередь, обеспечивает более плавный спуск с холма и даже лучшее управление транспортным средством.
Следует учесть, что определение ускорения транспортного средства может произойти внутри средства, чувствительного к движению. Таким образом, система управления тормозами, и, в частности, средство управления тормозами, могут функционировать интегрально с и/или включать в себя средство, чувствительное к движению. В более общем случае, средство управления тормозами может содержать один электронный модуль управления или один, или больше модулей управления.
Средство управления тормозами может быть выполнено с возможностью (или может быть установлено с возможностью) устанавливать предел ускорения, как фиксированное значение, например, значение ниже 1 мс-2. Фиксированный предел ускорения может быть основан на вводе пользователем, например, через интерфейс. В качестве альтернативы, и, более предпочтительно, средство управления тормозами может быть выполнено с возможностью динамической установки предела ускорения на основе одного или больше состояний транспортного средства или входных команд водителя.
В варианте осуществления средство управления тормозами может быть выполнено с возможностью измерения требуемого крутящего момента привода и динамической установки предела ускорения на основе требуемого крутящего момента привода. Средство управления тормозами может измерять требуемый крутящий момент привода, формировать сигнал датчика положения педали акселератора транспортного средства, в случае необходимости, дополнительно учитывая сигнал от датчика выбора передачи. Датчик положения педали акселератора и/или датчик выбора передачи, таким образом, могут функционировать интегрально с и/или может формировать часть системы управления тормозами.
Динамическая установка предела ускорения на основе требуемого крутящего момента привода, обеспечивает особенно плавное движение при спуске с холма транспортного средства, поскольку она обеспечивает то, что ускорение транспортного средства будет соответствовать намерению водителя. В этом отношении предпочтительно, чтобы средство управления тормозами было выполнено с возможностью увеличения установленного предела ускорения при повышении требуемого крутящего момента.
Определение требуемого крутящего момента привода на основе сигнала датчика выбора передачи может подразумевать умножение сигнала датчика положения педали акселератора на коэффициент, взаимосвязанный с выбранной передачей. Предпочтительно, средство управления тормозами может быть выполнено с возможностью установки предела ускорения независимо от сигнала датчика положения педали акселератора, если никакая передача не выбрана (то есть в транспортном средстве установлена нейтральная передача).
Для максимального соответствия намерениям водителя средство управления тормозами может быть выполнено с возможностью определения требуемого ускорения, взаимосвязанного с требуемым крутящим моментом привода, и установки предела ускорения на пороговом значении, равном или выше, чем требуемое ускорение, Требуемое ускорение может предпочтительно соответствовать оценке ускорения, которое могло бы быть получено из требуемого крутящего момента привода в состоянии нулевого градиента транспортного средства (то есть на ровной поверхности). Предпочтительно, средство управления тормозами может быть выполнено с возможностью установки предела ускорения на значении в диапазоне от 0 до 1 мс-2 выше требуемого ускорения.
Средство управления тормозами также может быть выполнено с возможностью установки предела ускорения в зависимости от градиента транспортного средства. Градиент транспортного средства может быть детектирован средством определения градиента транспортного средства, таким как инклинометр, который может функционировать интегрально с и/или может формировать часть системы управления тормозами. Средство управления тормозами может быть выполнено с возможностью снижать предел ускорения в ответ на повышение градиента транспортного средства.
Предпочтительно, направление движения транспортного средства можно отслеживать средством управления тормозами (путем обмена сообщениями со средством, чувствительным к движению). Средство управления тормозами, предпочтительно, может быть выполнено с возможностью определения, движется ли транспортное средство в предполагаемом направлении или в нежелательном направлении со ссылкой на включенную передачу. Предпочтительно, средство управления тормозами может быть выполнено с возможностью установки предела ускорения в зависимости от направления движения, и при этом предел ускорения, в случае необходимости, устанавливают более низким, когда транспортное средство движется в нежелательном направлении, чем тогда, когда транспортное средство движется в желательном направлении.
Система управления тормозами, в случае необходимости, может иметь активированное и деактивированное состояния, которые можно выбирать через интерфейс пользователя. Средство управления тормозами может деактивировать систему либо обычным образом, путем перевода системы в положение ожидания, или просто путем установки предела ускорения на более высокий уровень, который не может быть достигнут транспортным средством.
Система может содержать педаль торможения для водителя и датчик положения педали торможения, который сообщается со средством управления тормозами. В некоторых случаях входная команда водителя будет исключать необходимость дополнительного усилия торможения и, в этом случае, средство управления тормозами просто отслеживает усилие торможения. Таким образом, средство управления тормозами может предпочтительно только добавлять усилие к источнику усилия торможения, когда соответствующее усилие торможения еще не приложено по входной команде водителя, например, через педаль тормоза. В настоящем изобретении усилие торможения предпочтительно может быть подано, в соответствии с необходимостью, для дополнения входной команды водителя. Усилие торможения может подаваться ко всем колесам транспортного средства для обеспечения максимальной силы сцепления.
Система управления тормозами может быть выполнена интегральной или может функционировать совместно с другими системами управления тормозами, например такими, как описаны в EP 0784551 B1 и/или в EP 1777133 A1.
В соответствии с другим аспектом изобретения, защита которого испрашивается, предусмотрен способ управления тормозами моторного транспортного средства, способ, в котором измеряют требуемый крутящий момент привода, устанавливают предел ускорения транспортного средства на основе требуемого крутящего момента привода, определяют ускорение транспортного средства и, если определенное ускорение превышает установленный предел ускорения, обеспечивают подачу к тормозам усилия торможения.
В соответствии с еще одним, другим аспектом изобретения, для которого испрашивается защита, предусмотрено моторное транспортное средство, содержащее систему управления тормозами в соответствии с одним аспектом изобретения или выполненное с возможностью использовать способ в соответствии с другим аспектом изобретения.
В пределах объема данного изобретения предусматривается, что различные аспекты, варианты осуществления, примеры, свойства и альтернативы, изложенные в предыдущих параграфах, в формуле изобретения и/или в следующем описании и на чертежах, могут рассматриваться независимо или в любой комбинации. Свойства и преимущества, упомянутые в отношении одного аспекта изобретения, применимы с необходимыми изменениями к любому другому аспекту изобретения, за исключением случая несовместимости свойств.
Изобретение поясняется чертежами, на которых показано следующее:
фиг.1 - схема системы управления тормозами для моторного транспортного средства, воплощающего одну форму настоящего изобретения;
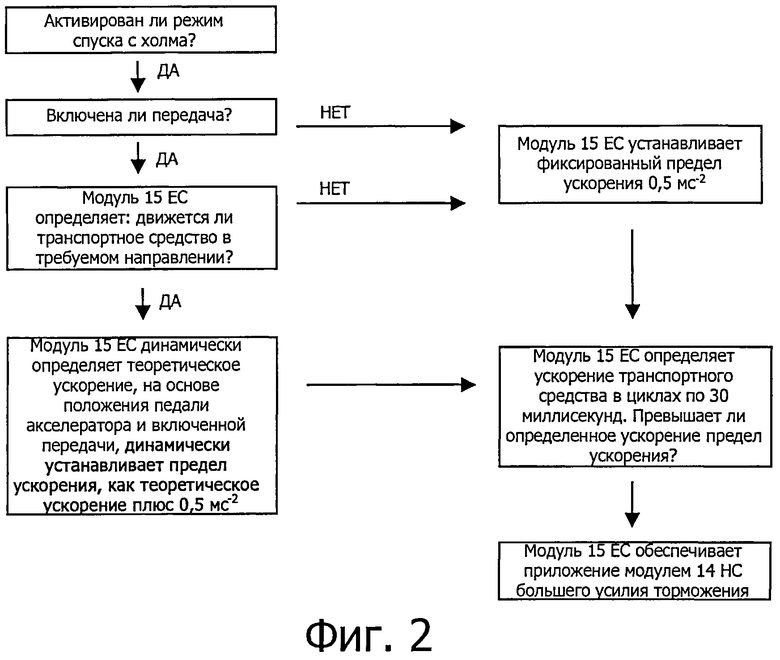
фиг.2 - блок-схема последовательности операций, представляющая общую работу системы управления тормозами по фиг.1 в рабочем режиме.
На фиг.1 показано моторное транспортное средство 10 в виде пунктирного контура с системой управления тормозами, имеющей режим спуска с холма, в соответствии с первым вариантом осуществления изобретения.
Когда активируется режим спуска с холма, система управления тормозами находится в активированном состоянии в соответствии с назначением изобретения. В отличие от этого, когда режим спуска с холма деактивируется, система управления тормозами деактивируется в соответствии с назначением изобретения.
Система управления тормозами и, в частности режим спуска с холма, может дополнительно выполнять другие функции торможения, не относящиеся к изобретению, такие как описаны в ЕР 0 784 551 В 1 или в EP 1777133 A1.
Система управления тормозами включает в себя, как обычно, компоновку торможения с дисковым тормозом 11 на каждом из четырех колес 12. Каждый дисковый тормоз 11 работает гидравлически через гидравлическую линию 13 от модуля 14 гидравлического управления (HC) тормозами, который функционирует как средство активации тормозов. Модулем 14 НС управляет модуль 15 электронного управления (EC), которые функционируют как средство управления тормозами. На фиг.1 показана только схема наиболее важных функциональных компонентов системы управления тормозами, в соответствии с изобретением. Дополнительные детали системы управления тормозами описаны в EP 0784551 B1 и включены в описание по ссылке и, таким образом, не будут дополнительно описаны.
Модуль 15 ЕС принимает сигнал скорости транспортного средства от средства, чувствительного к движению, в форме датчика 16 скорости транспортного средства, сигнал скорости каждого колеса от датчика 17 скорости колеса на каждом колесе 12 и сигнал запроса водителя от педали 18 акселератора (или дроссельной заслонки), в которую встроен датчик 19 положения педали акселератора. Модуль 15 EC также принимает сигнал спуска с холма от переключателя 20 управления спуском с холма, который переключает водитель, сигнал передачи от датчика 21 передачи привода и сигнал угла наклона от средства, чувствительного к градиенту, в этом примере инклинометра 22. Модуль 15 EC принимает сигнал торможения педали от переключателя 9 светового сигнала торможения на педали 24 тормоза.
Педаль 24 тормоза также ассоциирована с главным цилиндром 8, который соединен с датчиком 23 давления торможения, который формирует часть модуля 14 HC.
Датчик 23 давления торможения выполнен с возможностью передачи сигнала водителю от датчика 23 давления торможения в модуль 15 EC.
Модуль 15 ЕС во время работы управляет модулем 14 HC всякий раз, когда водитель включает переключатель 20 управления спуском с холма для выбора режима спуска с холма. Модуль EC может работать совместно с (то есть в дополнение) входными командами оператора от педалей 24, 18 акселератора и тормоза.
При движении моторного транспортного средства 10 может потребоваться выполнить спуск под наклон. Для помощи водителю при спуске под наклон управляемым образом модуль 15 EC выполнен с возможностью (установлен), в активированном состоянии системы, обеспечивать подачу усилия торможения средством активации тормозов, когда средство, чувствительное к движению, определяет, что ускорение транспортного средства превышает установленный предел ускорения.
В первом режиме работы системы предел ускорения устанавливают на фиксированное значение 0,5 мс-2. Модуль 15 EC отслеживает движение транспортного средства, детектируемое датчиком 16 скорости транспортного средства, и определяет ускорение транспортного средства в циклах по 10 миллисекунд. Если определяется, что ускорение превышает предел ускорения 0,5 мс-2, тогда модуль 15 EC проверяет сигнал от датчика 23 давления тормозов, который также постоянно отслеживается модулем 15 EC, для определения, приложено ли уже соответствующее усилие торможения со стороны водителя через педаль 24 тормоза. В случае если недостаточное усилие торможения прикладывается (если вообще прикладывается) через педаль тормоза, модуль 15 EC вырабатывает команду в модуле 14 НС для приложения и поддержания усилия торможения, для перевода ускорения транспортного средства в пределы 0,5 мс-2.
Второй режим работа системы будет описан ниже со ссылкой на фиг.2. В этом режиме предел ускорения устанавливают на фиксированном значении 0,5 мс-2, только если в транспортном средстве не включена передача, или если оно движется в нежелательном направлении. Если, с другой стороны, транспортное средство движется в требуемом направлении, в соответствии с включенной передачей, предел ускорения устанавливают динамически на основе требуемого крутящего момента привода.
Во втором режиме работы, при активации режима спуска с холма, модуль 15 EC проверяет через датчик 21 передачи включена ли передача. Если передача не включена или если модуль EC определяет через датчик 16 скорости автомобиля, что транспортное средство движется в нежелательном направлении (на основе включенной передачи), модуль 15 EC устанавливает фиксированный предел ускорения 0,5 мс-2.
Однако если на каком-либо этапе модуль 15 EC получает уведомление от датчика 21 передачи, что передача включена, и транспортное средство движется в требуемом направлении движения, в соответствии с включенной передачей, модуль EC переходит к динамической установке предела ускорения на основе требуемого крутящего момента привода, обозначенного датчиком 19 положения педали акселератора.
В частности, модуль EC динамически определяет (или проверяет в таблице или по карте) требуемое ускорение, ассоциированное с положением педали акселератора и выбранной передачей. Требуемое ускорение соответствует оценке ускорения, которое можно было бы ожидать, если бы транспортное средство находилось в состоянии нулевого градиента, то есть на ровной земле, и, таким образом, основано на известной информации о транспортном средстве, таком как вес и тяга.
Требуемое ускорение, которое определяют в циклах по 10 миллисекунд, используется как основа для установки предела ускорения: предел ускорения устанавливают на 0,5 мс-2 выше требуемого ускорения. В варианте второго режима работы (не показан на фиг.2) модуль 15 EC проверяет сигнал от инклинометра 22, регулирует предел ускорения так, чтобы он был равен требуемому ускорению, если детектируют, что градиент движения транспортного средства составляет больше чем 20%.
После установки предела ускорения или как фиксированного значения (когда передача не включена, или если транспортное средство движется в нежелательном направлении), или как динамического значения (когда транспортное средство движется в требуемом направлении), модуль 15 EC переходит к отслеживанию движения транспортного средства, детектируемого датчиком 16 скорости транспортного средства, и постоянно определяет ускорение транспортного средства, в циклах по 10 миллисекунд. Если определяют, что ускорение превышает предел ускорения, тогда модуль 15 EC проверяет сигнал от датчика 23 давления торможения, который также постоянно отслеживается модулем 15 EC, для определения, приложено ли уже соответствующее усилие торможения водителем через педаль 24 тормоза. В случае, когда через педаль тормоза прикладывается недостаточное (если вообще прикладывается) усилие торможения, модуль 15 EC вырабатывает команду для модуля 14 HC приложить и поддерживать усилие торможения для перевода ускорения транспортного средства в требуемые пределы.
Следующие примеры работы представлены для иллюстрации второго режима работы системы управления тормозами, в соответствии с первым вариантом осуществления изобретения:
Транспортное средство 10 движется по крутому наклону с передачей, включенной для движения вниз по склону. Ускорение транспортного средства превышает требуемое ускорение плюс 0,5 мс-2. Модуль 15 EC передает команду в модуль 14 HC генерировать усилие торможения и ограничить ускорение транспортного средства до требуемого ускорения плюс 0,5 мс-2.
Транспортное средство 10 движется вниз под наклон с включенной передачей для движения вниз по склону. Водитель переключает передачу, и новая передача приводит к ускорению транспортного средства. Ускорение превышает требуемое ускорение плюс 0,5 мс-2. Модуль 15 EC передает команду в модуль 14 HC генерировать усилие торможения и ограничивает ускорение транспортного средства до требуемого ускорения плюс 0,5 мс-2.
Возможно модифицировать второй режим работы таким образом, чтобы предел ускорения, ассоциированный с движением в нежелательном направлении, был установлен на основе требуемого крутящего момента, как описано в отношении движения в требуемом направлении.
В более общем случае, следует учесть, что множество модификаций может быть выполнено в системе управления торможением в соответствии с первым вариантом осуществления без выхода за пределы объема изобретения. Например, для активации системы торможения необходимо, чтобы она зависела от активации режима спуска с холма. Таким образом, система управления торможением по первому варианту осуществления может, в соответствии со вторым вариантом осуществления изобретения быть модифицирована так, чтобы она оставалась активной всякий раз, когда транспортное средство работает.
Система управления тормозами содержит средство ECU (15) управления тормозами, предназначенное для управления модулем (14) HCU гидравлического управления тормозами. ECU (15) выполнено с возможностью определения ускорения транспортного средства и обеспечения передачи усилия торможения, если определенное ускорение превышает установленный предел ускорения. При этом измеряют требуемый крутящий момент привода и динамически устанавливают предел ускорения на основе требуемого крутящего момента привода для увеличения установленного предела ускорения при увеличении требуемого крутящего момента привода. Достигается создание улучшенной системы управления тормозами. 3 н. и 13 з.п. ф-лы, 2 ил.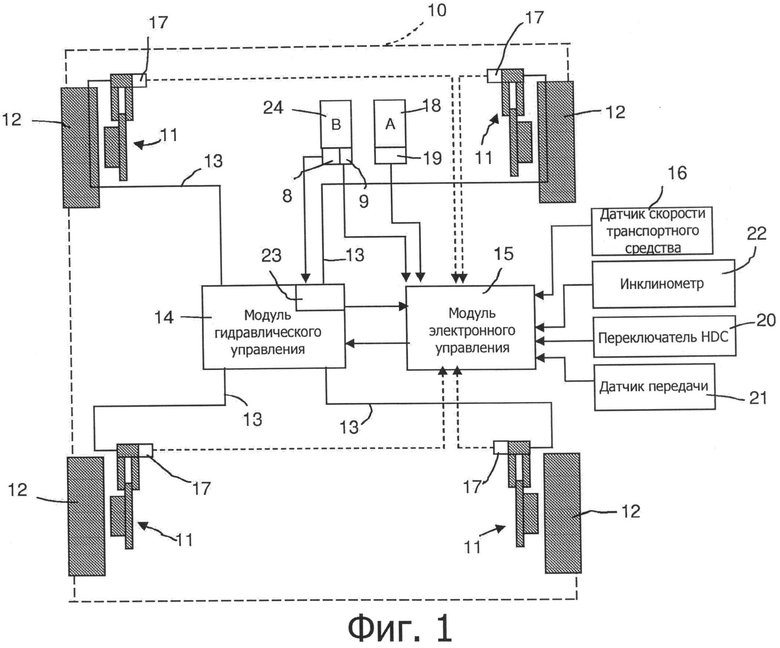
1. Система управления тормозами для моторного транспортного средства, содержащего множество колес, тормоза, предназначенные для приложения усилия торможения к одному или более колесам, и средство, чувствительное к движению, предназначенное для детектирования движения транспортного средства, при этом система содержит: средство активации тормозов, предназначенное для активации тормозов, для передачи усилия торможения; и средство управления тормозами, предназначенное для управления средством активации тормозов, в котором средство управления тормозами выполнено с возможностью определения ускорения транспортного средства на основе движения, детектируемого средством, чувствительным к движению, и для обеспечения того, что средство активации тормозов будет передавать усилие торможения, если измеренное ускорение превышает установленный предел ускорения, причем средство управления выполнено с возможностью измерения требуемого крутящего момента привода и для динамической установки предела ускорения на основе требуемого крутящего момента привода и для увеличения установленного предела ускорения при увеличении требуемого крутящего момента привода.
2. Система по п. 1, имеющая активированное и деактивированное состояние.
3. Система по п. 1, в которой средство управления тормозами выполнено с возможностью динамической установки предела ускорения на основе одного или более состояний транспортного средства, и/или входных команд водителя.
4. Система по п. 1, в которой средство управления выполнено с возможностью установки предела ускорения независимо от сигнала датчика положения педали акселератора транспортного средства, если в транспортном средстве включена нейтральная передача.
5. Система по п. 1, в которой средство управления тормозами выполнено с возможностью определения требуемого ускорения в соответствии с требуемым крутящим моментом привода и установки предела ускорения на пороговом значении, равном или превышающем требуемое ускорение.
6. Система по п. 1, в которой средство управления тормозами выполнено с возможностью определения, движется ли транспортное средство в требуемом направлении или в нежелательном направлении, со ссылкой на включенную передачу и установку предела ускорения в зависимости от направления движения, при этом предел ускорения устанавливают ниже, когда транспортное средство движется в нежелательном направлении, чем тогда, когда транспортное средство движется в требуемом направлении.
7. Система по п. 1, в которой ускорение транспортного средства определяется исходя из движения транспортного средства, детектируемого в течение цикла времени.
8. Система по п. 7, в которой ускорение транспортного средства определяется непрерывно на основании множества циклов времени.
9. Система по п. 7, в которой цикл времени составляет менее 100 миллисекунд.
10. Способ управления тормозами моторного транспортного средства, в котором измеряют требуемый крутящий момент привода, устанавливают предел ускорения транспортного средства на основе требуемого крутящего момента привода, определяют ускорение транспортного средства и, если измеренное ускорение превышает установленный предел ускорения, то обеспечивают, чтобы к тормозам подавали усилие торможения, при этом измеряют требуемый крутящий момент привода и динамически устанавливают предел ускорения на основе требуемого крутящего момента привода для увеличения установленного предела ускорения при увеличении требуемого крутящего момента привода.
11. Способ по п. 10, в котором детектируют включение передачи транспортного средства и устанавливают предел ускорения в зависимости от детектированного включения передачи.
12. Способ по п. 11, в котором определяют, движется ли транспортное средство в требуемом направлении или в нежелательном направлении, со ссылкой на включенную передачу и установку предела ускорения, в зависимости от направления движения, при этом предел ускорения устанавливают ниже, когда транспортное средство движется в нежелательном направлении, чем тогда, когда транспортное средство движется в требуемом направлении.
13. Способ по п. 10, в котором ускорение транспортного средства определяют исходя из движения транспортного средства, детектируемого в течение цикла времени.
14. Способ по п. 13, в котором цикл времени составляет менее 100 миллисекунд.
15. Способ по п. 13, в котором ускорение транспортного средства определяют непрерывно на основе множества циклов времени.
16. Моторное транспортное средство, содержащее множество колес, тормоза для приложения усилия торможения к одному или более колесам, средство, чувствительное к движению, предназначенное для детектирования движения транспортного средства, и систему управления тормозами по п. 1.
| Способ измерения двугранных углов призм | 1987 |
|
SU1538042A1 |
| DE19545010A1, 05.06.1997 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

