Настоящее изобретение относится к системе автоматизированного хранения и комплектации единиц хранения, прежде всего контейнеров (мелких деталей), с транспортными средствами, которые также называются «челноками». Кроме того, настоящее изобретение относится к самому транспортному средству, а также способу закладки на хранение и выгрузки со склада.
В обычной складской технике стеллажи обслуживаются механизмами обслуживания стеллажей. Обычно механизм обслуживания стеллажей является подвижным в вертикальном и горизонтальном направлении в стеллажном коридоре, который определен между двумя соседними стеллажами. Механизм обслуживания стеллажей располагает грузозахватным приспособлением, с помощью которого единицы хранения могут быть извлечены из мест хранения или же с мест хранения и сданы в места хранения или же на места хранения. Такое «обслуживание» (снабжение) стеллажа единицами хранения обычно происходит посредством расположенного с торца вертикального подъемника, на который механизм обслуживания стеллажей - в большинстве случаев по приводным буферным дорожкам - выдает единицы хранения в целях выгрузки со склада, или с которого механизм обслуживания стеллажей - опять в большинстве случаев окольным путем с приводных буферных дорожек - забирает единицы хранения в целях закладки на хранение.
На стеллажный коридор обычно предусмотрен один единственный стационарный вертикальный подъемник, грузозахватное приспособление которого является подвижным исключительно в вертикальном направлении и, который механизмом обслуживания стеллажей - или несколькими механизмами обслуживания стеллажей, которые тогда расположены без риска столкновения вертикально один над другим - снабжается единицами хранения. Но вертикальный подъемник на передней стороне стеллажного коридора с точки зрения техники потока материалов представляет собой узкое место типа «горлышка бутылки». Производительность вертикального подъемника является верхним пределом потенциально возможной закладки на хранение и выгрузки со склада в стеллажный коридор или же из стеллажного коридора. В зависимости от путей (высот), которые должен преодолевать вертикальный подъемник, чтобы забрать или передать единицу хранения, производительность уменьшается дополнительно. Чем длиннее пути, тем меньше единиц хранения могут быть заложены на хранение или выгружены со склада в единицу времени. Естественно, то же самое относится и к путям, которые должны быть преодолены механизмами обслуживания стеллажей в пределах стеллажных коридоров, чтобы забрать с передней стороны или передать единицу хранения. Конечно, эти факторы также зависят от размера стеллажа. Чем выше стеллаж, тем длиннее могут быть пути для вертикального подъемника. Чем длиннее стеллаж или же глубже стеллажный коридор, тем длиннее могут быть пути для механизмов обслуживания стеллажей.
Построенная таким образом система описана в патенте US 7,261,509 В2.
При еще одном классическом подходе снабжение стеллажа происходит лишь одним единственным механизмом обслуживания стеллажей на стеллажный коридор, который обычно перемещается со стороны пола или потолка вдоль одного или нескольких ходовых рельсов. Единицы хранения по подводящему транспортеру транспортируются к торцу стеллажа или же началу стеллажного коридора, откуда единицы хранения забираются механизмом обслуживания стеллажей. Подлежащие выгрузке со склада единицы хранения транспортируются механизмом обслуживания стеллажей к торцу стеллажа, чтобы быть переданными на отводящий транспортер. Эти транспортеры в большинстве случаев непосредственно примыкают к торцам ограничивающих стеллажный коридор стеллажей, чтобы как можно больше сократить пути для механизма обслуживания стеллажей. Это расположение транспортеров также называется передней зоной.
Чтобы отсоединить горизонтальные движения механизма обслуживания стеллажей от вертикальных движений его грузозахватного приспособления, уже предлагалось, вместо одного единственного механизма обслуживания стеллажей применять множество так называемых одноуровневых механизмов обслуживания. Поскольку одноуровневый механизм обслуживания не имеет подъема, он снабжает только один единственный уровень стеллажей. Обычно одноуровневый механизм обслуживания перемещается (с двух сторон) в привязке к стеллажу, то есть он перемещается на ходовых рельсах, которые в горизонтальном направлении закреплены вдоль стеллажей в стеллажном коридоре. Каждый стеллажный уровень снабжается одним единственным одноуровневым механизмом обслуживания. Тогда вертикальное движение единиц хранения, в свою очередь, требует расположенного с передней стороны вертикального подъемника, который обменивает единицы хранения с приводными буферными дорожками на каждом стеллажном уровне. И при этом подходе вертикальный подъемник представляет собой узкое место с точки зрения техники потока материалов. Такой одноуровневый механизм обслуживания, например, реализуется на рынке под названием «Multishuttle» (мультичелнок).
В другой концепции комплектации, как она описана в заявке на патент WO 2010/090515 А1, отдельные единицы хранения, например упаковочные единицы, собираются в большие по размеру единицы хранения, например, слой упаковочных единиц на поддоне, затем перекладываются на специальные складские таблары с ребристыми днищами для сцепляющего взаимодействия с грузозахватными приспособлениями механизмов обслуживания стеллажей, а затем на этих складских табларах закладываются на стеллажи. Тогда складские таблары служат в качестве каркасных опорных поверхностей. Оттуда отдельные упаковочные единицы забираются другими механизмами обслуживания стеллажей, которые являются перемещаемыми в вертикальном направлении в другом коридоре. Эти механизмы обслуживания стеллажей располагают грузозахватным приспособлением, которое в поперечном направлении (относительно стеллажного коридора) имеет вдвигаемые и выдвигаемые лапы (стержни). Затем изъятые упаковочные единицы передаются на отводящий транспортер, который простирается вдоль другого стеллажного коридора и противолежит стеллажу, а также (другому) механизму обслуживания стеллажей.
Недостатком описанных выше обычных стратегий хранения и комплектации является то, что производительность комплектации (число закладок и выгрузок со склада в единицу времени) часто является недостаточной, чтобы соответствовать требованиям эксплуатационника (склада). В этой связи роль играют несколько факторов. Важный фактор видится в единичном снабжении стеллажных коридоров единицами хранения с передней стороны, так как там всегда может быть расположен только один единственный вертикальный подъемник. Другой фактор видится в использовании одного единственного механизма обслуживания стеллажей на стеллажный коридор. Использование нескольких механизмов обслуживания стеллажей в одном и том же стеллажном коридоре невозможно, так как механизмы обслуживания стеллажей не могут обгонять друг друга в пределах стеллажного коридора.
Поэтому задача настоящего изобретения состоит в том, чтобы создать систему хранения и комплектации, способ закладки на хранение и выгрузки со склада, а также механизм обслуживания стеллажей, который преодолевает указанные выше недостатки.
Эта задача решена посредством системы автоматизированного хранения и комплектования единиц хранения, прежде всего контейнеров мелких деталей, причем система имеет стеллажную систему с множеством стеллажей, причем каждый стеллаж имеет несколько уровней один над другим, которые, в свою очередь, соответственно имеют множество расположенных рядом друг с другом постановочных мест, причем один первый и один второй стеллаж задают между собой стеллажный коридор, множество перемещаемых в стеллажном коридоре, связанных со стеллажом транспортных средств для закладки на хранение и выгрузки со склада единиц хранения в постановочные места и из постановочных мест в поперечном направлении, причем каждое транспортное средство соответственно имеет ходовую часть, по меньшей мере один привод движения и по меньшей мере одно грузозахватное приспособление, причем в стеллажном коридоре предусмотрено такое количество транспортных средств, что каждый стеллажный уровень является обслуживаемым по меньшей мере одним грузозахватным приспособлением одного из транспортных средств, по меньшей мере один интегрированный в стеллаже подъемник по меньшей мере с одним грузозахватным средством, причем грузозахватное средство подъемника настроено, чтобы переставлять единицы хранения между интегрированным в стеллаже передаточным местом, которое придано по меньшей мере одному интегрированному в стеллаже подъемнику, и по меньшей мере одним интегрированным в стеллаже буферным местом, причем каждое из буферных мест расположено только вертикально под или над передаточным местом, по меньшей мере один транспортер, который через подводящий/отводящий транспортер входит в стеллажный коридор и там стыкуется с передаточным местом и который доставляет подлежащие хранению единицы хранения к передаточному месту, а подлежащие выгрузке со склада единицы хранения транспортирует от передаточного места, и по меньшей мере один поперечный перестановщик для обмена единиц хранения между подводящим/отводящим транспортером и передаточным местом.
С помощью системы согласно изобретению в стеллаж интегрируются несколько подъемников, в продольном направлении Х стеллажа один за другим. Подъемники с помощью транспортной техники снабжаются единицами хранения. С точки зрения техники материального потока узкое место отдельного вертикального подъемника отпадает за счет множества подъемников в стеллаже. Производительность подъемников (или же подъемника) больше не является верхним пределом для циклов закладки на хранение и выгрузки со склада. В стеллаж даже может быть интегрировано столько подъемников, что производительности транспортера уже больше недостаточно, чтобы полностью загрузить все подъемники. В этом случае изобретение, несмотря на это, является масштабируемым за счет того, что предусматривается несколько транспортеров, предпочтительно на разных уровнях. В каждом стеллажном коридоре может быть предусмотрено такое количество транспортных средств, что каждый стеллажный уровень является обслуживаемым по меньшей мере одним другим грузозахватным приспособлением транспортных средств. То есть, если стеллажи, которые задают между собой стеллажный коридор, имеют, например, по четыре уровня, стеллажный коридор может (одновременно) обслуживаться двумя транспортными средствами с соответственно двумя грузозахватными приспособлениями, чтобы обеспечить возможность, одновременно обращаться ко всем четырем стеллажным уровням.
В одном предпочтительном варианте каждое транспортное средство имеет по меньшей мере один ползун с соответственно приданным подъемным приводом, причем ползун установлен в ходовой части вертикально подвижно, и причем приданный подъемный привод вертикально перемещает ползун.
Таким образом из одноуровневого механизма обслуживания получается многоуровневый механизм обслуживания, так что разные стеллажные уровни могут обслуживаться одним и тем же транспортным средством.
Прежде всего, каждое транспортное средство является перемещаемым на стеллаже вдоль горизонтальной направляющей, которая закреплена, предпочтительно, только на первом стеллаже или на втором стеллаже, и причем по меньшей мере одно грузозахватное приспособление каждого из транспортных средств установлено горизонтально свободно выступающим образом на по существу вертикально ориентированном ползуне так, что противолежащие в стеллажном коридоре на одной высоте транспортные средства во время продольного движения могут пересекаться, хотя ходовые части при пересечении вертикально перекрываются. Грузозахватные приспособления перекрываются горизонтально, то есть Грузозахватные приспособления покрывают в виде сверху на стеллажный коридор почти одинаковую площадь.
Хотя транспортные средства обслуживают несколько стеллажных уровней, они могут пересекаться в стеллажном коридоре, то есть проезжать мимо друг друга. Это объясняется, прежде всего, тем, что транспортные средства перемещаются, предпочтительно односторонне на продольных сторонах стеллажей, которые обращены к стеллажному коридору. Благодаря регулируемости грузозахватных приспособлений по высоте является возможным позиционировать Грузозахватные средства, включая груз, так, что транспортные средства, которые проезжают мимо друг друга, не сталкиваются своими грузозахватными приспособлениями. Подъемная функция грузозахватных приспособлений имеет еще одно преимущество, а именно, то, что транспортное средство, грузозахватное приспособление которого находится на соответствующем стеллажном уровне, при недостаточной загрузке на соседнем стеллажном уровне может помогать, если, возможно, приданное этому стеллажному уровню грузозахватное приспособление (другого транспортного средства) перегружено. Таким образом, просто выравниваются пиковые нагрузки.
Кроме того, является предпочтительным, если направляющие предусмотренных на одинаковой высоте в коридоре транспортных средств расположены на одинаковой высоте на противолежащих продольных сторонах первого и второго стеллажа.
Крепежный растр для направляющих и продольных балок стеллажей может быть сохранен, так что конструкция стеллажей получается менее сложной. Направляющие также могут быть использованы в качестве продольных балок стеллажа, например, чтобы быть опорой для каркасных опорных поверхностей или тому подобного.
Кроме того, является благоприятным, если каждая направляющая имеет профиль, который в горизонтальном продольном направлении стеллажного коридора закреплен на вертикальных стойках стеллажей, которые обращены к стеллажному коридору.
Конструкцию стеллажного сооружения по сравнению с обычными стеллажами изменять не нужно. Обычные стеллажи могут быть дооборудованы и переоборудованы, чтобы реализовать настоящее изобретение.
Предпочтительно, каждая направляющая имеет С-образный профиль, внутри которого движутся одно или несколько ходовых колес транспортного средства, на внешней стороне которого закреплены одно или несколько опорных колес вертикально соседнего в соответствующем стеллажном коридоре транспортного средства.
Такой С-образный профиль имеет то преимущество, что один и тот же С-образный профиль может быть использован для фиксации и стабилизации двух транспортных средств, которые в вертикальном направлении непосредственно противолежат друг другу. Число направляющих, которые должны быть установлены, чтобы удерживать транспортные средства в стеллажных коридорах, предпочтительно висящими с одной стороны, уменьшается до минимума.
В еще одном предпочтительном варианте ходовая часть выполнены в виде рамы и имеет по меньшей мере одно ходовое колесо, которое соединено с приводом движения, а также по меньшей мере одно, установленное свободно вращающимся, опорное колесо, причем по меньшей мере одно ходовое колесо расположено в верхней половине ходовой части, а по меньшей мере одно опорное колесо в нижней половине ходовой части.
Силы, которые в результате движения транспортного средства, прежде всего в связи с односторонней подвеской на стеллаже, передаются на стеллаж в результате движения транспортного средства, распределяются на как можно большее количество точек контакта. Контакт происходит предпочтительно через ходовые, направляющие и/или опорные колеса. Колеса распределены по ходовой части так, что предотвращается раскачивание транспортного средства, прежде всего, в ситуациях остановки. Если ходовая часть колеблется, хотя транспортное средство, собственно говоря, остановлено, теряется важное время цикла для закладки на хранение и выгрузки со склада, так как необходимо выждать, пока транспортное средство полностью не придет в положение покоя. Лишь после этого может происходить точное позиционирование транспортного средства относительно стеллажного места. Но если транспортное средство не колеблется, обмен единиц хранения может происходить сразу.
Предпочтительно, по меньшей мере одно ходовое колесо вращается вокруг ориентированной горизонтально оси, а по меньшей мере одно опорное колесо вращается вокруг вертикально ориентированной оси.
Транспортные средства висят на ходовых колесах вниз и за счет силы тяжести самостоятельно выравниваются. Если, все же, происходит столкновение между нижней частью ходовой части и стеллажами, это предотвращается опорными колесами.
В одном предпочтительном варианте по меньшей мере один подъемник расположен во втором стеллаже на в первом вертикальном ряду стеллажа, который граничит со вторым вертикальным рядом во втором стеллаже, в котором расположены передаточное место и по меньшей мере одно буферное место.
В этой конструктивной форме происходит обмен единицами хранения между подъемником и передаточными местами, а также между подъемником и буферными местами в продольном направлении стеллажа. Таким образом комбинация из подъемника и передаточных и буферных мест интегрируется в одинарные стеллажи и делает выполнение двойного стеллажа излишним. Теряется меньше пространства в поперечном направлении Z.
Таким образом, два подъемника находятся в одном и том же стеллаже. Производительность транспортировки в вертикальном направлении удваивается, хотя единицы хранения подводятся или же отводятся только по одному стеллажному коридору. Кроме того, является возможным, что один из подъемников производит закладку на хранение, в то время как другой производит выгрузку со склада, причем оба подъемника обращаются к одному и тому же передаточному месту. За счет этого, в свою очередь, становится возможным, что подводящий/отводящий транспортер в стеллажном коридоре может использоваться как для закладки на хранение, так и для выгрузки со склада. Точно также является возможным, что оба подъемника используются исключительно для закладки на хранение или исключительно для выгрузки со склада, за счет чего удваивается пропускная способность в вертикальном направлении.
В еще одной предпочтительной конструктивной форме передаточное место и по меньшей мере одно буферное место выполнены для зацепления в продольном направлении с грузозахватным приспособлением по меньшей мере одного подъемника.
Кроме того, является предпочтительным, если по меньшей мере одно буферное место дополнительно выполнено для зацепления в поперечном направлении с грузозахватными приспособлениями транспортных средств.
В еще одной предпочтительной конструктивной форме передаточное место имеет поперечный перестановщик, который выполнен для того, чтобы перемещать единицы хранения в поперечном направлении без столкновения с грузозахватным приспособлением по меньшей мере одного подъемника.
В другом варианте изобретения по меньшей мере один подъемник расположен в третьем стеллаже, который расположен «спина к спине» относительно второго стеллажа, причем передаточное место и по меньшей мере одно буферное место расположены во втором стеллаже и соответственно противолежат по меньшей мере одному подъемнику в третьем стеллаже в поперечном направлении Z.
За счет этого расположения подъемников и передаточных или же буферных мест не теряются постановочные места, которые противолежат транспортной технике в коридорах на одинаковой высоте. Дело в том, что при этом виде расположения там также предусмотрены подъемники, передаточные места и/или места перестановки.
В еще одном благоприятном варианте передаточное место и по меньшей мере одно буферное место выполнены для того, чтобы в поперечном направлении зацепляться с грузозахватным приспособлением по меньшей мере одного подъемника и с грузозахватными приспособлениями транспортных средств.
В этой конструктивной форме обмен единиц хранения происходит исключительно в поперечном направлении Z. Это упрощает форму выполнения причастных к этому компонентов.
В еще одном благоприятном варианте в третьем стеллаже расположен по меньшей мере один другой подъемник, который противолежит другому передаточному месту и по меньшей мере одному другому буферному месту во втором стеллаже.
Здесь опять выражается та идея, что в продольном направлении друг за другом могут быть расположены несколько подъемников и несколько передаточных или же буферных мест в расчете на стеллаж, чтобы повысить производительность транспортировки в вертикальном направлении.
Кроме того, является предпочтительным, если поперечный перестановщик является ременным подъемником, роликовым гребнем или толкателем.
Кроме того, является предпочтительным, если каждое грузозахватное приспособление в горизонтальном направлении имеет вдвигаемые и выдвигаемые лапы и расположенные сбоку относительно их транспортеры, причем лапы, предпочтительно, являются индивидуально вдвигаемыми и выдвигаемыми.
Грузозахватные приспособления подъемников и транспортных средств могут быть выполнены идентичными. Это повышает модульность всей системы, так как стоимость грузозахватных приспособлений (разработка, изготовление и т.д.) явно меньше, чем в системах, в которых используется множество разных компонентов.
Является особо предпочтительным, если постановочные места выполнены для зацепления в поперечном направлении с грузозахватными приспособлениями транспортных средств.
Такие постановочные места могут представлять собой каркасные опорные поверхности с ребристыми возвышениями, так что является возможным взаимодействие с зацеплением между грузозахватными приспособлениями и постановочными местами. Закладка на хранение и выгрузка со склада происходит, например, посредством вдвигания и выдвигания лап в сочетании с подъемом (приподнятием при выгрузке со склада).
Предпочтительно, каждый стеллажный уровень стеллажа с подъемником имеет, либо передаточное место, либо буферное место.
Чем больше буферных мест предусмотрено в вертикальном ряду стеллажа, где также расположено передаточное место, тем больше возможностей имеет подъемник выгрузить или захватить единицу хранения. При этом не является настоятельно необходимым, чтобы подлежащая закладке единица хранения уже была опущена на высоту стеллажного уровня, на который должна быть заложена соответствующая единица хранения. Благодаря подъемной функции челноков такие единицы хранения могут быть также забраны с граничащих буферных мест
Кроме того, вышеуказанная задача решена посредством транспортного средства, причем транспортное средство имеет: ходовую часть, которая простирается по существу вдоль продольной стороны стеллажа, на котором транспортное средство является перемещаемым, и который с расположенным напротив него стеллажом определяет стеллажный коридор, по меньшей мере один привод движения, ползун, который вертикально подвижно установлен в ходовой части, подъемный привод для вертикального перемещения ползуна относительно ходовой части, по меньшей мере одно грузозахватное приспособление, которое соответственно свободно выступающим образом закреплено на ползуне так, что транспортные средства, которые обслуживают в стеллажном коридоре одинаковые стеллажные уровни, и которые перемещаются на противолежащих продольных сторонах стеллажей на одинаковой высоте во время продольного движения могут пересекаться, и что подводящие и/или отводящие транспортеры, которые входят в стеллажный коридор, могут быть обойдены сверху или снизу.
С помощью таких транспортных средств является возможным одновременно производить несколько закладок на хранение или выгрузок со склада на одном и том же стеллажном уровне. Кроме того, транспортные средства во время продольного движения в стеллажном коридоре могут встречаться без столкновения друг с другом. Кроме того, транспортные средства могут объезжать сверху или снизу транспортеры, которые в целях закладки на хранение и выгрузки со склада входят в стеллажные коридоры. Транспортные средства по мере необходимости могут одновременно использоваться на разных стеллажных уровнях, причем сохраняются преимущества одноуровневых механизмов обслуживания.
Предпочтительно, каждое грузозахватное приспособление ориентировано в горизонтальной плоскости и имеет в поперечном направлении, предпочтительно индивидуально, вдвигаемые и выдвигаемые лапы, а также по меньшей мере один, предпочтительно расположенный сбоку, поперечный транспортер.
С помощью поперечного транспортера единицы хранения могут передаваться грузозахватным приспособлением в направлении стеллажа без выдвижения лап. Лапой грузозахватное приспособление может входить в стеллаж, чтобы оттуда забирать единицы хранения. Таким образом, без проблем возможна передача единиц хранения в обоих направлениях (закладка на хранение и выгрузка со склада). При этом лапы предпочтительно расположены на уровне, который находится под плоскостью транспортировки поперечных транспортеров. Если захватывается единица хранения, лапы выдвигаются под подлежащую захвату единицу хранения, грузозахватное приспособление слегка приподнимается, а затем лапы снова вдвигаются, причем поперечные транспортеры приводятся в действие предпочтительно самое позднее, когда подлежащая захвату единица хранения будет в контакте с поперечными транспортерами. Таким образом подлежащая захвату единица хранения затягивается на поперечный транспортер.
Кроме того, является благоприятным, если каждое грузозахватное приспособление дополнительно имеет регулируемую в продольном направлении боковую направляющую, которая предпочтительно имеет пару толкателей, причем каждый толкатель простирается по существу в вертикальной поперечной плоскости перпендикулярно продольному направлению.
Боковая направляющая обеспечивает, что подлежащие закладке единицы хранения в продольном направлении могут быть точно позиционированы в постановочных местах. Кроме того, боковая направляющая грузозахватных приспособлений транспортных средств предотвращает соскальзывание единиц хранения во время продольного движения в стеллажном коридоре, которое вполне может с высокими скоростями. В то же время боковая направляющая предотвращает соскальзывание единиц хранения при торможении транспортного средства.
В одном благоприятном варианте ходовая часть имеет ходовые колеса и опорные колеса.
За счет выполнения ходовых и опорных колес ходовые части могут быть с одной стороны подвешены на стеллажах. Это делает возможным пересечение транспортных средств, которые расположены на одинаковой высоте в стеллажном коридоре.
Кроме того, является предпочтительным, если ходовые колеса установлены в верхней половине ходовой части и предпочтительно вращаются вокруг оси в поперечном направлении, и причем опорные колеса установлены в нижней половине ходовой части и предпочтительно вращаются вокруг оси в вертикальном направлении.
В еще одной предпочтительной конструктивной форме ходовые колеса расположены внутри, а опорные колеса снаружи на закрепленных друг против друга на одинаковой высоте, предпочтительно С-образных, направляющих профилях, в то время, когда транспортное средство перемещается в стеллажном коридоре.
Таким образом, направляющие профили имеют двойную функцию. Во-первых, они служат в качестве ходового рельса для ходовых колес. Во-вторых, они служат в качестве опорного рельса для опорных колес. Таким образом число рельсов, которые должны быть проложены в стеллажном коридоре, чтобы надежно направлять транспортные средства, может быть значительно сокращено.
В еще одном предпочтительном варианте каждое транспортное средство имеет два или более грузозахватных приспособлений, которые в вертикальном направлении соответственно дистанцированы между собой так, что соответственно дистанцированные грузозахватные приспособления другого транспортного средства, которое обслуживает идентичные стеллажные уровни в стеллажном коридоре, при продольном движении могут пересекаться без столкновения.
Кроме того, является благоприятным, если каждое грузозахватное приспособление имеет свой собственный подъемный привод, чтобы быть индивидуально перемещаемым в вертикальном направлении.
Если каждое грузозахватное приспособление является индивидуально перемещаемым, при закладке на хранение и выгрузке со склада можно совершать подъезд к большему количестве мест хранения, чем при жестко соединенных между собой грузозахватных приспособлениях. Тем самым, в свою очередь, возрастает вероятность того, что грузозахватные приспособления во время остановки транспортного средства одновременно могут обменивать единицы хранения со стеллажом.
Кроме того, является благоприятным, если каждое грузозахватное приспособление посредством кронштейна соединено с ползуном.
Кроме того, вышеуказанная задача решена посредством способа закладки на хранение единицы хранения в стеллаж с несколькими, расположенными один над другим стеллажными уровнями, которые соответственно имеют несколько, расположенных одно рядом с другим постановочных мест, посредством подводящего/отводящего транспортера, который вдается в стеллажный коридор и стыкуется по меньшей мере с одним передаточным местом, причем каждый стеллажный уровень обслуживается по меньшей мере одним грузозахватным приспособлением транспортного средства, со следующими шагами: подвод единицы хранения по подводящему транспортеру, перемещение подведенной единицы хранения с подводящего транспортера на передаточное место в поперечном направлении посредством поперечного перестановщика, который является перемещаемым в путь транспортировки подводящего транспортера, забор единицы хранения с передаточного места в продольном направлении или в поперечном направлении посредством интегрированного в стеллаж подъемника за счет того, что грузозахватное приспособление подъемника горизонтально выдвигается в передаточное место, затем вертикально приподнимается, а затем горизонтально вдвигается, предпочтительно при одновременном приведении в действие транспортера, который является частью грузозахватного приспособления подъемника, перемещение забранной единицы хранения в вертикальном направлении посредством интегрированного в стеллаж подъемника, отдача забранной единицы хранения в продольном направлении или поперечном направлении на буферное место, которое расположено над или под передаточным местом, причем буферное место придано одному стеллажному уровню для закладки на хранение, причем буферное место расположено на высоте стеллажного уровня для закладки на хранение или рядом с ним, причем приводится в действие транспортер грузозахватного приспособления подъемника, как только подъемник достигнет уровня буферного места, забор единицы хранения из буферного места посредством одного из транспортных средств за счет того, что транспортное средство перемещается горизонтально в стеллажном коридоре вдоль стеллажа к вертикальному ряду стеллажа, которые имеет передаточное место и буферное место, и за счет того, что грузозахватное приспособление транспортного средства, если это требуется, перемещается вертикально до уровня буферного места и за счет того, что затем грузозахватное приспособление транспортного средства горизонтально выдвигается, вертикально приподнимается, а затем снова вдвигается, предпочтительно при одновременном приведении в действие транспортера, который является частью грузозахватного приспособления транспортного средства, перемещение транспортного средства в горизонтальном направлении к другому вертикальному ряду стеллажа, который имеет место закладки на хранение, и, если это требуется, вертикальное перемещение грузозахватного приспособления транспортного средства до уровня места закладки на хранение, и приведение в действие транспортера грузозахватного приспособления транспортного средства таким образом, что единица хранения перемещается на или в место закладки на хранение.
Подразумевается, что указанные выше и еще подлежащие ниже пояснению признаки являются применимыми не только в соответственно указанном сочетании, но в других сочетаниях или самостоятельно, не выходя за рамки настоящего изобретения.
Примеры осуществления изобретения представлены на чертеже и более детально поясняются в нижеследующем описании. Показано на:
Фиг.1: блок-схема системы хранения и комплектации согласно изобретению,
Фиг.2: вид сверху на частично представленную первую стеллажную систему,
Фиг.3: частичный вид на фасад стеллажной системы согласно фиг.2,
Фиг.4А и 4Б: вид транспортного средства согласно изобретению спереди и сзади,
Фиг.5: лапа, которая применяется в транспортном средстве согласно фиг.4,
Фиг.6: грузозахватное приспособление, которое применяется в транспортном средстве согласно фиг.4, и которое имеет систему лап с множеством лап согласно фиг.5,
Фиг.7: другой частичный вид на фасад стеллажной системы в увеличенной детализации,
Фиг.8: увеличенное изображение подвески транспортного средства согласно фиг.7,
Фиг.9: направляющий профиль согласно фиг.7 и 8 в поперечном разрезе,
Фиг.10: изображение в перспективе двух поперечных перестановщиков в области подводящего транспортера,
Фиг.11: вид в перспективе интегрированного в роликовый транспортер ременного подъемника,
Фиг.12: изображение в перспективе области другой стеллажной системы, на котором детально показаны подводящие транспортеры на разных уровнях, передаточные места и подъемники,
Фиг.13: вид сверху на другой вариант стеллажной системы,
Фиг.14А и 14Б: схематическое изображение в перспективе буферного места и передаточного места, как они применяются в системе согласно фиг.13,
Фиг.15: другая модификация стеллажной системы в виде сверху,
Фиг.16: блок-схема способа закладки на хранение согласно изобретению.
В нижеследующем описании фигур одинаковые признаки обозначены одинаковыми ссылочными обозначениями. Модификации обозначаются сходными ссылочными обозначениями. Ссылочное обозначение 10 обозначает, в общем, систему хранения и комплектации согласно настоящему изобретению.
Когда в нижеследующем речь идет о вертикальной и/или горизонтальной ориентациях, само собой разумеется, что ориентации в любое время посредством поворота могут поменяться и поэтому не должны истолковываться ограничительно.
Под механизмом обслуживания стеллажей (также в виде сокращения «МОС») в нижеследующем подразумевается транспортная тележка или же обслуживающий механизм, который обычно перемещается, в большинстве случаев по рельсовым направляющим, в стеллажном коридоре между двумя стеллажами. Обычно МОС имеет ходовой механизм, одну или несколько мачт, подъемный механизм, а также по меньшей мере одно грузозахватное приспособление. Мачта может быть установлена на верхнем направляющем рельсе и/или на полу соединена с поперечиной, которая переносит силы через опорные и направляющие ролики. Приводы часто выполняются в виде ременных приводов или зубчатоременных приводов. Подъемный привод МОС часто происходит посредством вращающихся гибких тяг, таких как зубчатые ремни, цепи или тросы. Для больших ускорений подходит движущийся вместе привод движение «Омега», при котором МОС перемещается с помощью приводного ролика вдоль зубчатого ремня. Захват груза, например, в случае с поддонами, происходит с помощью телескопируемой вилки, а в случае с контейнерами посредством переворачивания с помощью ленточного транспортера, втягивания с помощью тяговых устройств (например, крюка, лассо или лапы) или с помощью подъемного стола.
Под единицей хранения в нижеследующем подразумевается единица манипулирования, которая применяется, прежде всего, в области складирования (стеллаж). Единица хранения обычно является однородной по артикулу товара, но может быть и смешанной. Единица хранения может содержать вспомогательное средство хранения, а также сам складской товар. Но единица хранения также может быть сама по себе складским товаром, если вспомогательное средство хранения опускается. В качестве вспомогательных средств хранения обычно применяются погрузочные вспомогательные средства, как например, поддоны, решетчатые поддоны, контейнеры, емкости, картонные коробки, таблары и тому подобное. К складским товарам относятся штучные товары, сыпучие товары, жидкости или газы. Сыпучие товары, жидкости и газы для дальнейшего манипулирования требуют упаковочных средств, чтобы определить упаковочные единицы. В дальнейшем, в качестве примера, в качестве единиц хранения будут рассматриваться порожние и наполненные контейнеры. Разумеется, что все варианты осуществления аналогично контейнерам являются применимыми и к другим единицам хранения, как например, картонным коробкам или другим упаковочным единицам.
Стеллажная система (например, стеллажный склад) обычно содержит множество стеллажей, которые предусмотрены в виде отдельных стеллажей или двойных стеллажей. Двойные стеллажи - это отдельные стеллажи, которые установлены спина к спине. Между стеллажами определены стеллажные коридоры, которые обычно проходят в продольном направлении стеллажей и служат зоной действия для МОС. Стеллажи заканчиваются на своих, соответственно противолежащих торцах, которые, в свою очередь, ориентированы в плоскости перпендикулярно продольному направлению стеллажного коридора. Сами стеллажи имеют множество (стеллажных) мест хранения или же постановочных мест, которые расположены в виде находящихся один над другим стеллажных уровней. Вертикальный ряд стеллажа простирается в вертикальном направлении в пределах одного стеллажа и обычно имеет одно над другим столько мест хранения или же постановочных мест, сколько имеется стеллажных уровней.
Под вертикальным лифтом или подъемником в дальнейшем подразумевается устройство для манипулирования единицами хранения с грузозахватным приспособлением, которое является подвижным исключительно в вертикальном направлении, и поэтому применяется только для преодоления разностей высот. Вертикальный лифт или же подъемник, в отличие от МОС, расположен стационарно относительно стеллажей.
Под транспортным средством или же челноком в дальнейшем подразумевается механизм обслуживания стеллажей, который по существу обслуживает один (единственный) стеллажный уровень, чтобы снабжать места хранения или же постановочные места этого стеллажного уровня единицами хранения, то есть закладывать их на хранение и выгружать со склада.
На фиг.1 показана блок-схема системы 10 хранения и комплектации согласно изобретению. Система 10 может иметь область 12 поступления товаров, область 14 выхода товаров, одну или несколько разъединительных позиций 16, стеллажную систему 18, одну или несколько упаковочных и/или отгрузочных позиций 22, с факультативно подсоединенным к ним сортировщиком 20. Различные элементы 12-22 системы 10 с точки зрения техники потока материалов соединены между собой одним или несколькими транспортерами (или же транспортной техникой) 24, которые на фиг.1 обозначены стрелками. Управление системой 10 происходит одним или несколькими узлами 26 управления (компьютером управления складом, компьютером управления потоком материалов и т.п.), которые, с помощью проводов и/или беспроводным способом, сообщаются с элементами 12-24, а также их субъединицами (приводы, программируемые контроллеры, переключатели, фотоячейки, прочие исполнительные органы и тому подобное).
Примерный поток материалов в системе 10 далее будет описан на примере представленных на фиг.1 контейнеров (мелких деталей), которые закладываются на хранение в автоматизированный склад мелких деталей (АСМД) и выгружаются из него.
Группа контейнеров доставляется в область 12 поступления товаров. На разъединительной позиции 16 стопки контейнеров могут быть разделены на отдельные контейнеры. В области 12 поступления товаров находящиеся в контейнерах изделия или продукты могут быть идентифицированы, и в целях инвентаризации и управления складом в узел 26 управления может быть предано соответствующее сообщение. Кроме того, в области 12 поступления товаров неупакованные изделия или продукты могут быть упакованы в контейнеры, чтобы затем быть заложенными в стеллажной системе 18 (например, АСМД). Заложенные на хранение контейнеры выгружаются со склада в соответствии с заданиями по комплектации. Задание по комплектации соответствует одному или нескольким заказам клиентов и обычно содержит несколько позиций заказа в виде строк заказа. Каждая строка заказа определяет тип продукта или изделия, а также необходимое количество продуктов или же изделий этого типа. Заказы комплектуются на упаковочных и/или отгрузочных позициях 22. Когда последовательность (секвенция), в которой заказанные продукты или же изделия отправляются клиенту, является значительной, и контейнеры уже не могут быть выгружены из стеллажной системы 18 в правильной последовательности, между упаковочными и/или отгрузочными позициями 22 и стеллажной системой 18 могут быть расположены один или несколько сортировщиков 20. С упаковочных и/или отгрузочных позиций 22 окончательно скомплектованные заказы переводятся в область 14 выхода товаров, откуда они транспортируются соответствующему клиенту.
На фиг.2 показан вид сверху на часть стеллажной системы 18 согласно фиг.1 в схематической форме.
Стеллажная система 18 имеет несколько стеллажей 30. Стеллажи 30 ориентированы в продольном направлении X. Показанная на фиг.2 справа (и более конкретно на обозначенная) торцевая сторона стеллажной системы 18 или же стеллажей 30 лежит в плоскости YZ, которая ориентирована перпендикулярно продольному направлению X. Ось Z указывает поперечное направление, а ось Y - вертикальное направление (высоту).
На фиг.2 в качестве примера показаны пять стеллажей 30-1 - 30-5. В случае с парами стеллажей 30-2, 30-3, 30-4, 30-5 речь идет соответственно о двойном стеллаже 32, а в случае со стеллажом 30-1 речь идет об отдельном стеллаже 34. Стеллажи 30-1 и 30-2 задают между собой первый стеллажный коридор 36-1. Стеллажи 30-3 и 30-4 задают между собой второй стеллажный коридор 36-2.
Стеллажная система 18 согласно фиг.2 с точки зрения техники потока материалов снабжается транспортером 24 в виде роликового транспортера 28 единицами хранения, которые здесь не показаны. Роликовый транспортер 28 проходит вдоль торцевой стороны стеллажей 30 и может соединяться с подводящим транспортером 38 и отводящим транспортером 40, которые ориентированы соответственно перпендикулярно роликовому транспортеру 28 в области торцов. Транспортеры 38 и 40 соответственно входят в стеллажные коридоры 36-1 и 36-2. Разумеется, что обозначенные черными стрелками направления транспортировки могут быть ориентированы как угодно. Путем реверсирования направления транспортировки подводящий транспортер 38 может быть превращен в отводящий транспортер 40. То же самое относится и к отводящему транспортеру 40. Транспортеры или же компоненты 28, 38 и 40 транспортной техники в примере согласно фиг.2 расположены на единой высоте, предпочтительно в диапазоне от 700 до 800 мм. Транспортер 24 рассчитан на то, чтобы без проблем транспортировать около 1500 единиц хранения в час. Разумеется, что показанные на фиг.2 транспортеры могут быть заменены транспортерами других типов (цепными транспортерами, подвесными транспортерами, ленточными транспортерами и т.д.). Конечно, транспортеры также могут быть дополнены транспортерами других типов.
В случае со стеллажами 30 речь может идти о стеллажах 30 с более конкретно не обозначенными каркасными опорными поверхностями, боковыми опорными уголками или тому подобным. Предпочтительно, применяются каркасные опорные поверхности с простирающимися в поперечном направлении Z ребристыми возвышениями, которые взаимодействуют с зацеплением с предпочтительно выполненными в виде лап грузозахватными приспособлениями механизмов обслуживания стеллажей. Преимуществом применения каркасных опорных поверхностей является свободное подразделение мест складирования. Каркасные опорные поверхности обычно имеют длину от 200 до 300 см, так что без проблем могут складироваться разные по размерам (стандартные) единицы хранения. Размер места складирования в случае с ребристыми каркасными опорными поверхностями определен только шагом растра ребристых возвышений. Эти преимущества оправдываются особенно при динамическом управлении местами складирования, при котором место и размер места складирования динамически, то есть, прежде всего, по потребности, программным обеспечением управления местами складирования (узел 26 управления) постоянно назначаются снова.
Далее описывается по существу закладка и выгрузка единиц хранения на одинарную глубину. Конечно, единицы хранения могут заложены и выгружены со склада и на многократную глубину. Это по существу зависит от размеров мест складирования и грузозахватных приспособлений. Само собой разумеется, что процессы, которые описываются только в свете хранения на одинарной глубине, могут быть без проблем масштабированы на хранение на многократной глубине, например, за счет того, что места складирования выполняются соответственно глубокими, а грузозахватные приспособления в направлении манипулирования - соответственно длинными.
На фиг.2 стеллажи 30-1, 30-4 и 30-5 в качестве примера служат исключительно для хранения единиц хранения, так как там не предусмотрены вертикальные лифты. Напротив, в стеллажах 30-2 и 30-3 по два подъемника 42 интегрировано в соответствующий стеллаж 30-2 или же 30-3, то есть в соответствующий горизонтальный ряд стеллажа, вместо обычно предусмотренных там мест складирования. Подъемникам 42 в примыкающих стеллажах 30-2 и 30-3 противолежит по одному передаточному месту 44. Два расположенных рядом друг с другом передаточных места 44 заменяют на фиг.2 постановочное место 46, которое реализовано, например, одной из описанных выше каркасных опорных поверхностей. В качестве примера, такая каркасная опорная поверхность имеет размер двух расположенных в продольном направлении Х стандартизированных единиц хранения, так что каждое передаточное место 44 и каждое грузозахватное приспособление 42 в примере согласно фиг.2 может манипулировать соответственно одной стандартной единицей хранения. Под подъемником 42, как уже было указано, подразумевается стационарное устройство для манипулирования единицами хранения, которое транспортирует единицы хранения исключительно в вертикальном направлении Y. В отличие от обычных вертикальных лифтов подъемники 42 интегрированы в стеллажи 30 или же стеллажную конструкцию. Каждый подъемник 42 имеет по меньшей мере одно грузозахватное приспособление. Если, например, предусмотрены два грузозахватных приспособления друг над другом, вертикальное разделение грузозахватных средств может соответствовать разделению подводящих и/или отводящих транспортеров 38 и 40.
Со ссылкой на фиг.3 показан вид в разрезе вдоль линии III-III на фиг.2. На фиг.3 взгляд в продольном направлении Х направлен в стеллажный коридор 36-1 и 36-2. Изображение фиг.3 слегка отличается от фиг.2, причем на фиг.3 явно показано хранение на двукратную глубину в стеллажах 30. Стеллажи 30 имеют соответственно несколько стеллажных уровней Ei в вертикальном направлении Y один над другим, причем нумерация начинается с самого нижнего стеллажного уровня Ei. Большинство постановочных мест 46 стеллажных уровней Ei на фиг.3 заняты единицами хранения на двойную глубину. На фиг.3 лишь в первом стеллаже 30-1 полностью свободно одно постановочное место 46. По отдельности свободны отдельные места складирования, как это показано на уровнях Е1 стеллажа 30-1, Е3 и Е4 стеллажа 30-4 и Е5 стеллажа 30-5. В качестве примера на первом уровне Е1 стеллажей 30-4 и 30-5 обозначены одна более длинная единица 50′ хранения и три более коротких единиц 50′′ хранения.
В разрезе фиг.3 четко виден стоящий относительно торца спереди подъемник 42 в стеллаже 30-3, который заменяет вертикальный ряд стеллажа вместо там обычно предусмотренных каркасных опорных поверхностей.
Подводящий транспортер 38 выполнен на одинарную глубину и стыкуется с передаточным местом 44 в стеллаже 30-2. Таким образом, для манипулирования на двойную глубину две единицы 50 хранения в продольном направлении Х подводятся по подводящему транспортеру 38 и одна за другой переводятся в передаточное место 44, как это будет далее описано точнее. На подводящем транспортере 38 происходит транспортировка единиц 50 хранения в продольном направлении X. Передача в передаточное место 44 происходит в поперечном направлении Z. Подъемник 42 своим грузозахватным приспособлением, которое далее со ссылкой, прежде всего, на фиг.4-6 еще будет описано точнее, забирает единицу 50 хранения (или единицы 50 хранения) в поперечном направлении Z из передаточного места 44 и перемещает забранные единицы 50 хранения в вертикальном направлении Y на высоту заданного для закладки стеллажного уровня Ei (или на высоту расположенного непосредственно по соседству стеллажного уровня Ei) и выгружает забранные единицы 50 хранения на буферное место 48 на этой высоте. Выгрузка происходит аналогично захвату в обратной последовательности шагов перемещения.
Буферные места 48 расположены над и/или под передаточным местом 44 вертикального ряда стеллажа 30-2. Буферные места 48 могут заменять все или только некоторые из (стандартных) мест складирования над или под передаточным местом 44. Предпочтительно, передаточное место 44 и буферные места 48 образуют башнеобразную колонну (вертикальный ряд стеллажа), которая больше не имеет (стандартных) мест складирования. Буферные места 48 в отличие от передаточного места 44 предпочтительно не имеют компонентов транспортной техники, чтобы поставленные там единицы 50 хранения перемещать в направлении подъемника 42 или в направлении подводящего транспортера 38 или отводящего транспортера 40. Таким образом экономятся расходы, которые возникают в связи с обычными буферными (транспортными) путями.
Разумеется, что в одной и той же колонне (вертикальном ряду стеллажа) может быть и несколько передаточных мест 44, если несколько транспортеров 38 и/или 40 подсоединяются к колонне на разных уровнях. Это может быть, например, в том случае, если имеется несколько уровней закладки на хранение/выгрузки со склада. На фиг.3 показан один единственный уровень закладки на хранение на высоте второго стеллажного уровня Е2. Но точно так же возможно, например, на пятом стеллажном уровне Е5 дополнительно предусмотреть другой подводящий транспортер 38 над показанным на фиг.3 подводящим транспортером 38.
Еще одну особенность стеллажной системы 18, как она показана на фиг.2 и 3, можно увидеть в транспортных средствах 60, которые далее также называются челноками и имеют функцию перемещаемого по существу в продольном направлении Х механизма обслуживания для снабжения соответственно приданного стеллажного уровня Ei. В каждом стеллажном коридоре 36 одновременно используются несколько транспортных средств 60. В стеллажном коридоре 36-1 показаны два обозначенных более конкретно челнока 60-1 и 60-2, а также другой челнок (ср. фиг.3). В стеллажном коридоре 36-2 наряду с более конкретно обозначенными челноками 60-3 и 60-4 используются дополнительные челноки 60, как это в качестве примера показано на фиг.3. Каждый челнок 60 имеет два грузозахватных приспособления, которые далее будут описаны более точно. Челноки 60 с одной стороны могут быть подвешены на продольных сторонах 138 стеллажей 30 и перемещаться в продольном направлении Х в стеллажном коридоре 36. Предпочтительно, грузозахватные приспособления вертикально разнесены между собой так, что они одновременно могут обслуживать первый и третий или же второй и четвертый стеллажный уровень стеллажного модуля 54, который в примере согласно фиг.3 охватывает четыре стеллажных уровня E1-Е4. Челноки 60 могут закладывать на хранение и выгружать единицы 50 хранения в оба стеллажа 30, которые примыкают к стеллажному коридору 36, в котором эксплуатируется челнок 60. (Вертикальное) расстояние между грузозахватными приспособлениями челноков 60 предпочтительно является постоянным и предпочтительно соответствует многократной величине (нормированного) расстояния 94 между стеллажными уровнями. Грузозахватные приспособления челноков 60 могут быть выполнены вертикально подвижными, так что противолежащие на одинаковой высоте челноки, как например, челноки 60-1 и 60-2 в стеллажном коридоре 36-1, могут снабжать единицами 50 хранения соответственно все стеллажные уровни Ei приданного им стеллажного модуля 54. Если челноки 60-1 и 60-2 при продольном движении, то есть одновременном движении обоих челноков 60-1 и 60-2 в продольном направлении Х в стеллажном коридоре 36-1 пересекаются, то есть встречаются и/или друг друга обгоняют, челноки 60-1 и 60-2 могут без столкновения проезжать один мимо другого, причем их грузозахватные приспособления смещаются относительно друг друга на высоту 94 стеллажного уровня, как это показано на фиг.3 для челноков 60 в стеллажном коридоре 36-2. Таким же образом является возможным то, что челноки 60 внутри стеллажных коридоров проезжают под и/или над транспортерами 38 и 40.
Возможность того, что челноки 60 в пределах одного и того же стеллажного коридора 36 могут пересекаться и одновременно оснащены подъемом на высоту по меньшей мере одного стеллажного уровня Ei, кроме того позволяет иметь одновременный доступ к единицам 50 хранения из одного и того же стеллажного уровня Ei. Это относится как к закладке на хранение, так и к выгрузке со склада. Но то же самое относится и к обмену единиц 50 хранения с буферными местами 48. Поскольку челноки 60 оснащены подъемной функцией, является возможным, что челнок 60 забирает единицу 50 хранения со стеллажного уровня Ei, отличного от того, на который он забранную единицу 50 хранения передает. Таким образом является возможным то, что единица 50 хранения закладывается в стеллажный уровень Ei, хотя буферное место 48 на том же стеллажном уровне Ei было пустым. Аналогичное относится и к процессам выгрузки со склада.
Поскольку один или несколько подъемников 42 могут быть предусмотрены в продольном направлении Х стеллажа 30 один за другим и в поперечном направлении Z, прилегая к соответственному числу передаточных мест 44 в непосредственно прилегающем стеллаже 30, производительность (транспортировки) значительно повышается. «Бутылочное горлышко» одного единственного подъемника 42 (или вертикального лифта) на торце стеллажей 30 ликвидируется многократным выполнением подъемников 42 в стеллажах 30. Чем больше подъемников 42 применяется в продольном направлении X, тем длиннее простирается транспортер 38 или же 40 в стеллажный коридор 36, как это ниже еще будет описано точнее.
Возвращаясь к фиг.3, далее продолжается описание процесса закладки на хранение. После того, как подъемник передал единицу 50 хранения в заданное буферное место 48, например, на буферное место 48 в седьмом стеллажном уровне Е7, челнок 60-1 может своим верхним грузозахватным приспособлением забрать буферизованную там единицу хранения, затем двигаться в продольном направлении Х стеллажного коридора 36-1 к месту закладки на хранение (свободное постановочное место 46) и своим грузозахватным приспособлением поставит там подлежащую закладке единицу 50 хранения в поперечном направлении Z. Закладка на хранение также может происходить в постановочное место 46 в стеллаже 30-1 или в стеллаже 30-2. Закладка на хранение может происходить в седьмой стеллажный уровень Е7, но и в восьмой стеллажный уровень Е8. Аналогичное относится, естественно в обратной последовательности, и к процессу выгрузки со склада.
Транспортеры 38 и 40 могут использоваться как дороги с односторонним движением, то есть по одному стеллажному коридору 36 происходит (только) закладка на хранение, а по другому стеллажному коридору 36 (только) выгрузка со склада. На фиг.2 это обозначено соответствующими транспортными стрелками, причем стеллажный коридор 36-1 служит для закладки на хранение, а стеллажный коридор 36-2 для выгрузки со склада. В этой связи подъемники 42 в третьем стеллаже 30-3 служат (предпочтительно только) как лифты закладки на хранение, а подъемники 42 во втором стеллаже 30-2 (предпочтительно только) как лифты выгрузки со склада. Если состоящие из передаточных мест 44, буферных мест 48 и подъемников 42 функциональные единицы представить себе продолженными в стеллажах 30-4 и 30-5, прежде всего при зеркальном расположении на не показанном другом конце стеллажных коридоров 36, то становится ясно, что первая функциональная единица может быть применена для закладки на хранение, а вторая функциональная единица для выгрузки со склада в одном и том же коридоре 36. Но обычно каждый подъемник 42 используется для закладки на хранение и выгрузки со склада, причем в этом случае в каждом стеллажном коридоре 36 имеются подводящий транспортер 38 и отводящий транспортер 40, но на разных высотах. На фиг.3 можно, например, на высоте четвертого стеллажного уровня Е4 предусмотреть отводящий транспортер в первом стеллажном коридоре 36-1, чтобы в первом стеллажном коридоре можно было, как закладывать на хранение, так и выгружать со склада.
Кроме того, является возможным то, что показанные на фиг.2 подъемники 42 выполнены так, что их грузозахватные приспособления могут работать, как в позитивном, так и в негативном поперечном направлении Z. В этом случае подъемники 42 в третьем стеллаже 30-3 при удлиненном продолжении отводящего транспортера 40 в глубину стеллажного коридора 36-2 также могут использоваться и для выгрузки со склада. После того как эти подъемники 42 выгрузят подлежащую закладке единицу 50 хранения на одном из представленных на фиг.3 буферных мест 48, они могут непосредственно получать от челноков 60-3 или 60-4 подлежащую выгрузке со склада единицу 50 хранения, чтобы на ее обратном пути к основанию подъемника 42 захватывать подлежащую выгрузке единицу 50 хранения на уровень передаточного места 44, чтобы затем передать ее на отводящий транспортер 40 транспортера 24. Само собой разумеется, подъемник 42 мог бы захватывать и единицы 50 хранения из буферных мест 48, которые ранее были оставлены челноком 60 в стеллажном коридоре 30-1 на этих буферных местах 48 в целях выгрузки со склада. Другими словами, это означает, что подъемники 42 на фиг.2 и 3 могут использоваться, как для закладки на хранение, так и для выгрузки со склада. То же самое относится и к челнокам 60, которые далее на фиг 4А и 4Б описываются более точно.
На фиг.4А и 4Б показана одна конструктивная форма транспортного средства 60, причем на фиг.4А показана задняя сторона, которая обычно обращена к стеллажу 30, а на фиг.4Б передняя сторона челнока 60, которая обычно обращена к стеллажному коридору 36. Далее челнок 60 описывается со ссылкой на фиг.4А и 4Б.
Транспортное средство или же челнок 60 имеет ходовую часть 62, по меньшей мере один привод 64 движения, подъемный привод 66, ползун 68, тяги 69, а также одно или несколько грузозахватных приспособлений 70. На фиг.4А и 4Б в качестве примера показаны два грузозахватных приспособления 70-1 и 70-2, которые в вертикальном направлении Y разнесены на высоту примерно двух стеллажных уровней Ei (ср. также стрелку 94 на фиг.4Б). Кроме того, челнок 60 может иметь блок 72 управления, токоприемник 74, одно или несколько ходовых колес 76, одно или несколько направляющих колес 78 и/или одно или несколько опорных колес 79. Грузозахватное приспособление 70 описывается со ссылкой на фиг.5 и 6.
Ходовая часть 62 выполнена в виде рамы и может иметь три конкретно не обозначенных главных стороны, которые здесь, например, образуют открытую вниз форму буквы «U», причем открытый конец через выступающий в поперечном направлении Z соединительный элемент 63, который простирается по существу в продольном направлении, соединены между собой. Этот выступающий соединительный элемент 63 должен быть выполнен так, чтобы он не сталкивался с предусмотренным на такой же высоте на соседнем стеллаже 30 челноком 60, как это показано, например, в стеллажном коридоре 36-2 согласно фиг.3.
Ползун 68 может быть выполнен Н-образным и установлен в ходовой части 62 вертикально подвижным образом. Ползун 68 служит для крепления по меньшей мере одного грузозахватного приспособления 70. Каждое грузозахватное приспособление 70 в поперечном направлении Z, свободно выступая, через кронштейны 86, которые простираются по существу в поперечном направлении Z, соединено с ползуном 68. Грузозахватные приспособления 70 сидят на продольных балках 88, которые, в свою очередь, соединены с кронштейнами 86, и которые простираются по существу в продольном направлении X. Кроме того, ползун 68 прочно соединен с одной или несколькими гибкими тягами 69 (например, цепями, зубчатыми ремнями, тросами и т.п.), которые приводятся в действие одним или несколькими подъемными приводами 66 в целях движения ползуна 68 в вертикальном направлении Y. В челноке 60 согласно фиг.4 предусмотрен только один единственный подъемный привод 66, который взаимодействует с переподъемом 84, чтобы приводить в действие обе гибких тяги 69, которые закреплены в расположенных в продольном направлении Х снаружи областях ползуна 68, чтобы передавать подъемные силы одинаково распределенными на ползун 68. Если предусмотрен только один подъемный привод 66 для обоих грузозахватных приспособлений 70-1 и 70-2, Грузозахватные приспособления 70-1 и 70-2 синхронно приподнимаются и опускаются относительно ходовой части 62. Вертикальное расстояние 94 между грузозахватными приспособлениями 70 челнока 60 предпочтительно составляет целую многократную величину высоты стеллажного уровня Ei. Подразумевается, что челнок 60 также может иметь больше или меньше чем два грузозахватных приспособления 70-1 и 70-2, и что расстояния между грузозахватными приспособлениями 70, например, могут соответствовать высоте трех стеллажных уровней Ei. Грузозахватные приспособления не должны быть обязательно симметрично разнесены между собой в вертикальном направлении Y. Но они должны быть разнесены так, чтобы Грузозахватные приспособления 70 в стеллажном коридоре 36 непосредственно соседнего в направлении Z челнока 60 могли проходить без столкновения. Другими словами, это означает, что (перемещаемые по высоте) Грузозахватные приспособления 70 могут останавливаться только на таких высотных уровнях, где у соседнего челнока грузозахватные приспособления как раз не останавливаются.
Кроме того, является возможным предусмотреть подъемный привод 66 для каждого грузозахватного приспособления 70, так чтобы грузозахватные приспособления 70 могли индивидуально перемещаться в вертикальном направлении Y. В этом случае при пересечении челноков 60 относительно соседнего в направлении Z челнока 60 необходимо следить только за тем, чтобы в сумме было обеспечено не больше грузозахватных приспособлений, чем стеллажных уровней модуля 54.
В продольном направлении Х стеллажного коридора 36 челноки 60, которые простираются по существу в вертикальной плоскости XY, перемещаются на ходовых колесах 76 предпочтительно в расположенных горизонтально направляющих 80, которые со ссылкой на фиг.7-9 еще будут описаны более точно. Ходовые колеса 76, из которых на фиг.4 два расположены в верхней половине ходовой части 62, могут приводиться в движение соответственно с помощью собственного привода 64-1 и 64-2 движения. Подразумевается, что приводы 64-1 и 64-2 синхронизированы между собой, по меньшей мере, посредством соответствующего управления блоком 72 управления, в котором также могут сохраняться начальные пусковые меры и тому подобное. Кроме того, подразумевается, что ходовые колеса также могут быть расположены и в нижней половине ходовой части 62, также в качестве дополнения. В этом случае челнок 60 не висит на стеллаже 30, а стоит на стеллаже 30. Ходовые колеса 76 вращаются вокруг осей 76′, которые ориентированы в поперечном направлении Z.
Кроме того, могут быть предусмотрены направляющие колеса 78, которые предпочтительно расположены в непосредственной близости от ходовых колес 76, и которые в примере согласно фиг.4 установлены (свободно вращаясь) вокруг вертикальной оси параллельно оси Y. Факультативно, направляющие колеса 78 могут иметь пружинную подвеску, чтобы удерживать челнок 60 в пределах заданных допусков в вертикальной плоскости XY.
Кроме того, могут быть предусмотрены опорные колеса 79, которые предпочтительно расположены в противолежащей ходовым колесам 76, нижней области ходовой части 62. Опорные колеса 79 тоже вращаются вокруг вертикальных осей, которые ориентированы параллельно оси Y. Опорные колеса 79 предотвращают столкновение (в примере согласно фиг.4 установленного в подвешенном на одном из стеллажей 30 положении) челнока 60 со стеллажами 30.
Является предпочтительным, если все колеса 76, 78 и 79 расположены на одной стороне, предпочтительно задней стороне, челнока 60.
Кроме того, на ходовой части 62 может быть расположен токосъемник 74, который предпочтительно имеет вертикальное расстояние от ходовых колес 76, которое составляет целочисленную многократную величину высоты стеллажного уровня Ei. На фиг.4 это расстояние соответствует высоте двух стеллажных уровней Ei. Общая высота ходовой части 62 в направлении Y может, например, составлять многократную величину высоты стеллажного уровня. Длина ходовой части 62 в направлении Х может меняться и предпочтительно составляет порядок величины длины постановочного места 46. Ходовая часть 62 и ползун 68 имеют такую форму, что единицы 50 хранения могут быть заложены на хранение и выгружены со склада в позитивном и в негативном поперечном направлении Z стеллажей 30, которые ограничивают соответствующий стеллажный коридор 36, в котором эксплуатируется транспортное средство 60. На фиг.4А и 4Б четко видно, что контейнеры 52 могут перемещаться через ходовую часть 62 или же ползун 68 также и в негативном поперечном направлении Z, чтобы закладывать контейнеры 52 на хранение в стеллаж 30 или выгружать со склада, на котором (стеллаже) подвешено показанное на фиг.4 транспортное средство 60.
Подразумевается, что вместо токосъемника 74 может использоваться не показанный аккумулятор энергии (например, Powercap), который может снова заряжаться на специально предусмотренных для этого зарядных станциях, предпочтительно в области передаточных мест 44 и буферных мест 48.
Грузозахватное приспособление 70 имеет в позитивном и негативном поперечном направлении Z вдвигаемые и выдвигаемые лапы 101, которые далее описываются более подробно со ссылкой на фиг.5. Кроме того, Грузозахватное приспособление 70 может иметь боковую направляющую 90, которая в примере согласно фиг.4 выполнена в виде двух пластинчатых ползунов 92-1 и 92-2, которые, в свою очередь, в продольном направлении Х могут перемещаться навстречу друг другу и друг от друга, чтобы предохранять единицы 50 хранения сбоку и направлять их во время закладки на хранение и выгрузки со склада.
Со ссылкой на фиг.5 показана отдельная лапа 101 лапового устройства 100 (фиг.6). Каждая лапа 101 является вдвигаемой и выдвигаемой вдоль оси 102, как в позитивном, так и в негативном направлении. Ось 102 ориентирована предпочтительно параллельно поперечному направлению Z в смонтированном состоянии грузозахватного приспособления 70. Лапа 101 имеет стержень 104, который предпочтительно изготовлен из углерода и имеет длину, которая почти соответствует длине грузозахватного приспособления 70 (в поперечном направлении Z). Длина стержня 104, а тем самым и грузозахватного приспособления 70, зависит от того, производится ли закладка на хранение и выгрузка со склада на одинарную глубину или многократную глубину.
Кроме того, каждая лапа 101 может иметь (поперечный) транспортер 106, который в примере согласно фиг.5 состоит из двух расположенных друг за другом ременных транспортеров 108-1 и 108-2 с соответствующими приводами 107-1 и 107-2. Ременные транспортеры 108 ориентированы параллельно стержню 104 и расположены сбоку от него. На фиг.5 ременные транспортеры 108 расположены только с одной стороны. Подразумевается, что ременные транспортеры 108 также могут быть предусмотрены и по обе стороны относительно стержня 104. Ременные транспортеры 108 могут иметь отводные ролики 109, которые интегрированы в приводы 107. Таким образом ременный транспортер получается малогабаритным и компактным. Стержень 104 убирается и выпускается посредством одного или нескольких приводов 110 стержня. Привод 110 стержня, как отводной ролик 109, может быть выполнен в виде одного или нескольких интегрированных приводных роликов 112. Боковая поверхность ролика 112 адаптирована к форме стержня 104 и предпочтительно имеет покрытие, чтобы предотвратить прокручивание роликов 112. Ролики вращаются вокруг оси, которая предпочтительно ориентирована параллельно продольному направлению X. В качестве альтернативы, стержни соединены с тросовыми приводами, которые предпочтительно многократно намотаны на приводной ролик, чтобы обеспечить привод стержней без проскальзывания, причем одновременно стержни предохранены от выпадения.
Наряду с роликами 112 (или вместо них), предусмотрены направляющие ролики 113 для стержня 104, которые расположены сбоку от оси 102 таким образом, что стержень 104 принудительно направлен коаксиально оси 102. Направляющие ролики 113 предпочтительно вращаются свободно вокруг соответствующей оси 114, которая предпочтительно ориентирована параллельно направлению Y. Подразумевается, что и направляющие ролики 113 могут быть приводными, но обычно направляющие ролики 113 выполнены свободно вращающимися. Направляющие ролики 113 могут быть зафиксированы с помощью болтов 116 на, здесь, например, состоящей из двух С-образных профилей раме 118.
Со ссылкой на фиг.6 в перспективе представлено лаповое устройство 100 с множеством, предпочтительно индивидуально, вдвигаемых и выдвигаемых лап 101 в смонтированном состоянии. Лаповое устройство 100 установлено на продольных балках 88 и прочно соединено с этими продольными балками 88. Пластинчатые ползуны 92-1 и 92-2 боковой направляющей 90 показаны в раздвинутом состоянии.
На фиг.7 показан вид спереди стеллажной системы 18, аналогичный фиг.3, только более детальный. На фиг.7 взгляд в продольном направлении Х падает в стеллажные коридоры 36-1 и 36-2, которые определены между стеллажами 30-1 и 30-2 или же 30-3 и 30-4. Подъемники 42 обозначены в виде лифта 122 для закладки на хранение в стеллаже 30-2 и лифта 120 для выгрузки со склада в стеллаже 30-3, которые движутся вдоль мачты 124 в вертикальном направлении Y вверх и вниз.
Кроме того, в стеллажном коридоре 36-1 показаны два подводящих транспортера 38-1 и 38-2 на разных высотах, чтобы передавать единицы 50 хранения в расположенные напротив в стеллаже 30-2 передаточные места 44-1 и 44-2 в поперечном направлении Z. Оттуда лифт 122 для закладки на хранение забирает единицы 50 хранения, транспортирует их вверх и снова передает их в поперечном направлении Z на свободные передаточные места 48, которые расположены в стеллаже 30-2 над или под передаточными местами 44-1 и 44-2.
При выгрузке со склада лифт 120 забирает единицы 50 хранения из буферных мест 48, которые расположены в третьем стеллаже 30-3 над или под передаточными местами 44-3 и 44-4. Передаточные места 44-3 и 44-4 стыкуются с отводящими транспортерами 40-1 и 40-2. Отводящие транспортеры 40-1 и 40-2 в стеллажном коридоре 36-2 расположены на разных высотных уровнях.
Фиг.7 служит для пояснения, предпочтительно одностороннего, направления челноков 60 на соответственно одном из стеллажей 30-1 - 30-4. Для более простой идентификации одного единственного челнока 60 на фиг.7 в верхней области второго стеллажного коридора 36-2 челнок окаймлен вспомогательной линией. Этот челнок 60 установлен на четвертом стеллаже 30-4 в висячем положении, а именно, только на четвертом стеллаже 30-4. То же самое относительно односторонней установки относится и к другим показанным на фиг.7 челнокам 60. На фиг.7 из соображений лучшей обзорности не показан челнок 60, который обслуживает те же стеллажные уровни Ei, что и расположенный на такой же высоте челнок 60. Показанные в стеллажном коридоре 36-1 челноки 60 все подвешены на первом стеллаже 30-1. Показанные во втором стеллажном коридоре 36-2 челноки 60 все подвешены на четвертом стеллаже 30-4. Соответствующие челноки 60, которые не показаны на фиг.7, были бы подвешены в стеллажном коридоре 36-1 на втором стеллаже 30-2 и во втором стеллажном коридоре 36-2 на третьем стеллаже 30-3.
Челноки 60 своими ходовыми колесами 76 могут быть подвешены в направляющих, которые в общем обозначены числом 130. Направляющие 130 закреплены на стойках 126 стеллажей 30 в горизонтальной ориентации параллельно стеллажным коридорам 36. В случае с направляющими 130 речь идет предпочтительно о С-образных профилях 132, которые со ссылкой на фигуры 8 и 9 еще будут описаны более подробно. В качестве альтернативы могут использоваться и U-образные, омего-образные или имеющие аналогичную форму профили. Кроме того, показаны обычные продольные балки 134 стеллажей 30, которые в поперечном разрезе тоже могут иметь С-образный профиль. На продольные балки 134 могут, например, быть уложены каркасные опорные поверхности. Но продольные балки 134 могут использоваться и как токоведущие структуры 136, которые взаимодействуют с токосъемниками 74 (ср. фиг.4) для электроснабжения челноков 60.
Направляющие 130, продольные балки 134 и токоведущие структуры 136 в этом смысле установлены на продольных сторонах 138 стеллажей 30, которые определены свободными внешними сторонами стеллажей 30.
Со ссылкой на фиг.8 показано увеличение области VIII на фиг.7. На фиг.8 представлена направляющая 130 в виде С-образного профиля 132, на который своим ходовым колесом 76 подвешен первый (нижний) челнок 60-1. Первый нижний челнок 60-1 находится под показанной пунктиром вспомогательной линией. Второй, верхний челнок 60-2 также взаимодействует с направляющей 130 через свое опорное колесо 79, которое расположено в нижней половине второго челнока 60-2. Таким образом, направляющая 130 служит, как для подвески нижнего челнока 60-1, так и для подпирания верхнего челнока 60-2. Нижний челнок 60-1 направляется внутри 138 С-образного профиля 132. Верхний челнок 60-2 подпирается снаружи 144 С-образного профиля 132.
Со ссылкой на фиг.9 в поперечном разрезе показан вариант выполнения С-образного профиля 132, который может быть изготовлен фальцеванием, например, из стали. Профиль 132 может иметь несколько полок 140. На фиг.9 профиль 132 имеет пять полок 140-1 - 140-5. С-образный профиль определяет отверстие 142, которое на фиг.9 ориентировано направо (в сторону стеллажного коридора 36). Ходовые колеса 76 катятся внутри 138 профиля 132 на второй полке 140-2. Опорные колеса катятся на внешней стороне пятой полки 140-5, которая ориентирована вертикально. Первая полка 140-1 не является настоятельно необходимой, но служит для бокового направления челнока 60, причем направляющие колеса 78 там прилегают к внешней стороне, где это в качестве примера показано на фиг.8.
На фиг.10 дано изображение в перспективе двух поперечных перестановщиков 150-1 и 150-2. Конкретно речь идет о первом ползуне 152-1 и втором ползуне 152-2. Ползуны 152 выполнены так, что они могут перемещаться в поперечном направлении Z через промежутки 160, которые определены между соседними роликами 154. Представленная на фиг.10 система применяется, например, в области подводящего транспортера 38 согласно фиг.2 и 3, которая противолежит передаточным местам 44.
Кроме того, в качестве поперечных перестановщиков 150 могут применяться и ременные транспортеры 156 в виде ременного подъемника 155, которые, в свою очередь, могут быть расположены в промежутках 160 между соседними роликами 154, как это в качестве примера показано на фиг.11. Преимуществом этого вида поперечных перестановщиков 150 является то, что боковые стенки 150 роликового транспортера 28 не должны быть обязательно снабжены шлицем, как у поперечного перестановщика 150 согласно фиг.10, чтобы сделать возможным проход поперечного перестановщика 150 в промежутки 160.
Ременные транспортеры 156 являются поднимаемыми и опускаемыми, так что единицы 50 хранения в опущенном положении ременных транспортеров 156 по роликам 154 могут транспортироваться в продольном направлении X, а в приподнятом положении ременных транспортеров 156 могут быть отведены в сторону в поперечном направлении Z, например, на передаточное место 44. Ременные транспортеры 156 также могут выходить за пределы ширины транспортера 38 или 40, так что они могут проникать в передаточное место 44 или передаточные места 44. Таким образом, поперечный перестановщик 150 может протираться на один из транспортеров 38/40, оба транспортера 38/40 и передаточное место или передаточные места 44.
Само собой разумеется, и другие элементы могут использоваться в качестве поперечных перестановщиков 150, как например, ленты из звеньев цепи с интегрированными роликами, причем ролики могут быть целенаправленно активированы и деактивированы, чтобы отводить единицы 50 хранения с цепного транспортера.
Со ссылкой на фиг.12 показан вид в перспективе в продольном направлении Х в области стеллажной системы 18, которая содержит два подъемника 42 в виде лифта 122 для закладки на хранение, четыре передаточных места 44 и два буферных места 48, а также два подводящих транспортера 38-1 и 38-2 на разных высотах. Передаточные места 44, которые соответственно рассчитаны на манипулирование единицами 50 хранения на двойную глубину, разнесены между собой на высоту двух стеллажных уровней в вертикальном направлении Y. То же самое относится и к буферным местам 48. Каждое из показанных на фиг.12 передаточных мест 44 имеет два расположенных друг за другом в поперечном направлении Z ременных транспортера 156 (без подъемной функции). Подводящие транспортеры 38-1 и 38-2 имеют по два расположенных друг за другом в продольном направлении Х ременных подъемника 155, которые, в свою очередь, противолежат передаточным местам 44 в поперечном направлении Z. Ременные подъемники 155 здесь реализуются, например, ременными транспортерами с подъемной функцией.
Кроме того, показаны два грузозахватных приспособления 162-1 и 162-2 первого и второго лифта 122-1 и 122-2 для закладки на хранение. Лифты 122-1 и 122-2 для закладки на хранение противолежат передаточным местам 44 и буферным местам 48 в поперечном направлении Z. Разумеется, что аналогичное относится и к лифтам для выгрузки со склада.
Со ссылкой на фиг.13 показана модифицированная стеллажная система 18′ в виде сверху.
На фиг.13 показаны три отдельных стеллажа 30-1 - 30-3, которые задают между собой первый стеллажный коридор 36-1 и второй стеллажный коридор 36-2, в которых, в свою очередь, эксплуатируются несколько челноков 60 с возможностью перемещения в продольном направлении X. Транспортер 24 расположен на двух разных высотах и может (с точки зрения техники потока материалов) быть разделен на контур закладки на хранение и контур выгрузки со склада. Закладка на хранение происходит по подводящему транспортеру 38, который расположен на нижнем высотном уровне. Выгрузка со склада происходит по отводящему транспортеру 40, который расположен на более высоком уровне, чем подводящий транспортер 38. Направления транспортировки на фиг.13 обозначены темными стрелками.
После того, как единица 50 хранения достигла конца подводящего транспортера 36 в первом стеллажном коридоре 36-1, который противолежит передаточному месту 44′ в поперечном направлении Z, единица 50 хранения с помощью поперечного перестановщика 150, который на фиг.13 обозначен двойной стрелкой, может быть переставлена на передаточное место 44′.
В продольном направлении Х передаточное место 44 окружено двумя подъемниками 42, которые могут быть использованы для закладки на хранение и/или выгрузки со склада единиц 50 хранения. Подразумевается, что, как под, так и над передаточными местами 44′, которые расположены на высотных уровнях подводящего транспортера 38 и отводящего транспортера 40, расположены буферные места 48′.
Со ссылкой на фиг 14А схематически обозначено буферное место 48′, как оно применяется в стеллажной системе 18′ согласно фиг.13. Подразумевается, что нижеследующие высказывания по буферному месту 48′ аналогично относятся к передаточным местам 44′ фиг.13, причем передаточные места 44′ отличаются от буферных мест 48′ лишь одним дополнительным транспортером, как например, ременным подъемником 155, как это еще будет описано со ссылкой на фиг.14Б.
Каждое буферное место 48′ выполнено чтобы, зацепляясь, взаимодействовать с грузозахватным приспособлением 70 челноков 60 и, зацепляясь, взаимодействовать с грузозахватными приспособлениями 162 подъемников 42 или же лифтов 120 и 122 для закладки на хранение и выгрузки со склада. Для этой цели буферное место 48′ может иметь, например, дно, на котором, предпочтительно в форме матрицы, расположены возвышения 166. На фиг.14А показаны лишь некоторые из возвышений 166. Возвышения 166 могут быть реализованы, например, в виде выполненных в форме звезды стоек, которые, как в поперечном направлении Z, так и в продольном направлении Х оставляют промежутки 168. В промежутки 168 могут входить, например, стержни 104 лапного устройства 100 подъемника 42, а также стержни 104 данного устройства 100 грузозахватного приспособления 70 челноков 60 в поперечном направлении Z.
По сравнению со стеллажной системой 18 согласно фиг.2 обмен единиц 50 хранения между подводящим транспортером 38, отводящим транспортером 40 и передаточными местами 44′ происходит, правда, по-прежнему в поперечном направлении Z. Но обмен между подъемниками 42 и передаточными местами 44′ или же буферными местами 48′ происходит в продольном направлении X. За счет этой меры является возможным интегрировать подъемники 42, передаточные места 44′ и буферные места 48′ в один и тот же стеллаж, так что, во-первых, можно отказаться от двойных стеллажей, а во-вторых, подъемники 42 могут использоваться, как для закладки на хранение, так и для выгрузки со склада.
Подразумевается, что только передаточное место или же передаточные места 44′ должны быть снабжены компонентами транспортной техники, которые обменивают единицы 50 хранения с отводящим транспортером 40. Передаточное место 44′, которое одно противолежит подводящему транспортеру 38, собственно говоря, в транспортной технике не нуждается, так как грузозахватные приспособления 162 подъемников 42 могут самостоятельно забирать поставленные там, подлежащие закладке единицы 50 хранения, причем лапы 101 вводятся в промежутки 168 в продольном направлении X, затем грузозахватное приспособление 162 приподнимается настолько, что подлежащая закладке единица 50 хранения снимается, и затем вводятся лапы 101 лапного устройства 100 грузозахватного приспособления 162 подъемника 42, предпочтительно с одновременным приведением в действие ременных транспортеров 108, чтобы надежно переместить подлежащую закладке единицу 50 хранения на грузозахватное приспособление 162. Затем подъемник 42 может быть перемещен в вертикальном направлении Y к буферному месту 48′, где подлежащая закладке единица 50 хранения выгружается с помощью ременных транспортеров 108, так что подлежащая закладке единица 50 хранения сидит на возвышениях 166 буферного места 48′. Если подъемник 42 перемещается к другому буферному месту 48′, то оттуда он только что описанным образом может принять подлежащую выгрузке единицу 50 хранения и передать на передаточное место 44′, которое придано отводящему транспортеру 40.
Если подводящий транспортер 38 и отводящий транспортер 40 находятся на одинаковой высоте, передаточное место 44′ должно быть оснащено дополнительным компонентом транспортной техники, как например, ременным подъемником 155, чтобы перемещать подлежащую выгрузке со склада единицу 50 хранения на отводящий транспортер 40. При этом ременный подъемник 155 должен быть способен опускаться так глубоко, чтобы грузозахватные приспособления 162 подъемников 42 при захвате и сдаче единиц 50 хранения не сталкивались с ременным подъемником 155.
На фиг.14Б показано передаточное место 44′. Передаточное место 44′ расположено над или под буферным местом 48′. На фиг.14Б передаточное место 44′ противолежит подводящему транспортеру 38 и отводящему транспортеру 40. Подразумевается, что передаточное место 44′ также могло бы противолежать только подводящему транспортеру 38 или отводящему транспортеру 40, причем тогда в вертикальном ряду стеллажа было бы предусмотрено другое передаточное место 44′, которое взаимодействует с другим транспортером 38 или 40.
Передаточное место 44′ оснащено поперечным перестановщиком 150 в виде роликового гребня 167. Роликовый гребень 167 имеет несколько приводных роликов, которые ориентированы в продольном направлении X, и которые могут перемещать единицы 50 хранения в поперечном направлении Z. Ролики роликового гребня 167 разнесены между собой так, что они задают между собой промежутки 168. Промежутки 168 расположены так и имеют такие размеры, что лапы 101 грузозахватного приспособления 162 подъемников 42 могут вводиться в роликовый гребень и выводиться из него в целях захвата единицы 50 хранения.
При процессе закладки на хранение единицы 50 хранения по подводящему транспортеру 38 транспортируются до его конца, где расположен поперечный перестановщик 150, например, в виде ременного подъемника 155. Ременный подъемник 155 на фиг.14Б показан в своем приподнятом положении, так что его ремни могут транспортировать единицу 50 хранения в позитивном поперечном направлении Z с подводящего транспортера 38 на передаточное место 44′, то есть, на ролики роликового гребня 167. Высота уровней транспортировки, которые определяются ременным подъемником 155 и роликовым гребнем 167, взаимно согласованы и предпочтительно одинаковы. В то время как единица 50 хранения передается ременным подъемником 155 на передаточное место 44′, передача может поддерживаться приводными роликами роликового гребня 167, причем ролики соответственно приводятся в движение. Как только единица 50 хранения попадает на ролики роликового гребня 167, лапы 101 грузозахватного приспособления 162 показанного на фиг.14Б слева подъемника 42 могут быть введены в промежутки 168 вдоль позитивного продольного направления X. Как только лапы 101 будут позиционированы под (не показанной) единицей 50 хранения, подъемник 42 может совершить малое движение подъема, так что единица 50 хранения отделяется от роликового гребня 167. Затем лапы грузозахватного приспособления 162 снова вводятся в негативном продольном направлении X, чтобы переместить грузозахватное приспособление 162 подъемника 42 на высоту желаемого стеллажного уровня Ei.
При процессе выгрузки со склада грузозахватное приспособление 162 забирает подлежащую выгрузке единицу 50 хранения с буферного места 48′, как оно в качестве примера показано на фиг.14А, и перемещается на высоту передаточного места 44′, как оно в качестве примера показано на фиг.14Б. Не показанные на фиг.14Б ремни грузозахватного приспособления 162 приводятся в действие, так что подлежащая выгрузке со склада единица 50 хранения грузозахватным приспособлением 162 подъемника 42 в позитивном продольном направлении Х перемещается на роликовый гребень 167. Как только подлежащая выгрузке со склада единица 50 хранения будет находиться на роликовом гребне 167, ролики роликового гребня 167 могут быть приведены в действие таким образом, что подлежащая выгрузке со склад единица 50 хранения транспортируется в позитивном поперечном направлении Z на отводящий транспортер 40.
На фиг.15 показана другая модификация стеллажной системы 18′′, которая концептуально представляет собой слияние стеллажных систем 18 (фиг.2) и 18′ (фиг.13).
Стеллажная система 18′′ согласно фиг.15 имеет тоже отдельные стеллажи 34 (30-1) и двойные стеллажи 32 (30-2, 30-3 и 30-4, 30-5), причем подъемники 42 соответственно предусмотрены только в одном стеллаже, даже если, собственно говоря, в распоряжении имелись бы оба стеллажа 30 двойного стеллажа 32, чтобы разместить подъемники 42, передаточные места 44 и буферные места 48 в стеллажах 30.
В стеллаже 30-2 предусмотрена функциональная единица, состоящая из двух подъемников 42-1 и 42-2, а также по меньшей мере одного передаточного места 44 и по меньшей мере одного буферного места 48. Подразумевается, что, как прежде, каждый стеллажный уровень Е, снабжается единицами 50 хранения через по меньшей мере одно буферное место 48. Предпочтительно, каждому стеллажному уровню Ei придано свое собственное буферное место 48. Предусмотренная в стеллажном коридоре 36-1 транспортная техника может быть использована, как в качестве подводящего транспортера 38, так и в качестве отводящего транспортера 40.
То же самое относится и к транспортной технике в стеллажном коридоре 36-2, которая, однако, по сравнению, вдается в стеллажный коридор 36-2 в продольном направлении Х несколько глубже. Транспортная техника вдается глубже в стеллажный коридор 36-2, чтобы снабжать единицами 50 хранения два передаточных места 44 в стеллаже 30-4. Оба передаточных места 44 в стеллаже 30-4 могут быть окружены соответственно двумя подъемниками 42. Расположенное ближе всего к торцу передаточное место 44 в стеллаже 30-4 окружается обоими подъемниками 42-3 и 42-4. Расположенное глубже в стеллажном коридоре 36-2 второе передаточное место 44 в стеллаже 30-4 окружается обоими подъемниками 42-4 и 42-5. Подъемник 42-4 обменивает единицы 50 хранения предпочтительно с обоими передаточными местами 44 в стеллаже 30-4, а именно, в продольном направлении X. Другие подъемники 42 и передаточные места 44 или же буферные места 48 могут быть расположены с увеличивающейся глубиной стеллажного коридора в стеллаже 30-4, как это обозначено фантомными линиями. В этом случае транспортная техника должна была бы простираться в стеллажный коридор 36-2 соответственно далеко.
Кроме того, подразумевается, что дополнительные пары из подъемников 42 и передаточных или же перестановочных мест 44, 48 дополнительно или альтернативно могут быть расположены в таких стеллажах, которые на фиг.15 не имеют таких функциональных групп, как например, стеллажи 30-3 и 30-5. Подъемники 42, вместо двух направлений для закладки на хранение и выгрузки со склада могут использоваться и исключительно в одном направлении только для закладки на хранение или выгрузки со склада. Кроме того, грузозахватные приспособления 162 подъемников 42 могут быть модифицированы так, что они могут обменивать единицы 50 хранения, как в продольном направлении X, так и в поперечном направлении Z. В этом случае концептуальные возможности почти безграничны, если наряду с обменом единиц хранения в пределах одного и того же стеллажа может происходить и обмен с соседними стеллажами.
Если расширить концепцию стеллажной системы 18′′ согласно фиг.15 на один или несколько, предпочтительно независимых друг от друга, уровней транспортной техники, то производительность масштабируется почти как угодно. Узкое место с точки зрения техники потока материалов отпадает. Несколько челноков 60 могут одновременно обращаться к складским местам на одном и том же стеллажном уровне Ei. За счет соответствующего выбора стратегий закладки на хранение и выгрузки со склада грузозахватные приспособления 70, при условии, что челноки 60 имеют по несколько грузозахватных приспособлений 70, могут одновременно использоваться для закладки на хранение и выгрузки со склада соответствующего числа единиц 50 хранения. Это означает, что во время остановки челнока 60 в стеллажном коридоре 36 одновременно закладываются на хранение и/или выгружаются со склада несколько единиц 50 хранения. Вероятность того, что несколько единиц 50 хранения во время остановки челнока 60 могут быть обменены одновременно, возрастает, если грузозахватные приспособления 70 могут двигаться независимо друг от друга, как это уже было описано выше для подъема в вертикальном направлении Y. В этом случае расстояние грузозахватных приспособлений 70 может варьироваться от жесткой высоты двух стеллажных уровней Ei между высотами одного стеллажного уровня или трех стеллажных уровней (при общей высоте четырех стеллажных уровней челнока 60). Вероятность повышается дополнительно, если грузозахватные приспособления 70 челноков 60 оснащаются соответственно одним продольным приводом. В этом случае каждое грузозахватное приспособление 70, аналогично передвижной тележке, может дополнительно перемещаться в продольном направлении Х в то время, как соответствующий челнок 60 стоит.
Еще одно преимущество изобретения видится в диспетчировании, которое представляет интерес, прежде всего, при процессах выгрузки со склада. Выбор стеллажного уровня Ei, из которого должна быть выгружена единица 50 хранения, представляет собой первую ступень диспетчирования. Выбор челнока 60, который забирает подлежащую выгрузке единицу 50 хранения из выбранного складского уровня Ei, представляет собой следующую ступень диспетчирования. Выбор буферного места 48, на которое челнок 60 передает подлежащую выгрузке со склада единицу 50 хранения, представляет собой третью ступень диспетчирования. Поскольку по меньшей мере одно грузозахватное приспособление 70 челнока 60 оснащено подъемом, стеллажный уровень Ei и буферное место 48 могут быть выбраны. Четвертая ступень диспетчирования представляет собой выбор подъемника 42, с помощью которого подлежащая выгрузке со склада единица 50 хранения забирается с выбранного буферного места 48. Пятая ступень диспетчирования представляет собой выбор передаточного места 44, на которое выбранный подъемник 42 сдает подлежащую выгрузке со склада единицу 50 хранения.
Если осознать то, что предусмотрены или же могут быть предусмотрены несколько челноков 60 на стеллажный коридор 36 и несколько подъемников 42 на стеллаж (ряд) 30, понятно, какой огромный потенциал лежит в изобретении. Так, например, подлежащие выгрузке со склада единицы 50 хранения уже в желательной последовательности, то есть диспетчиризовано, могут передаваться с отводящего транспортера 40 на транспортер 24, чтобы транспортироваться позицию отгрузки/станцию упаковки 22. Такой образ действий является благоприятным особенно тогда, когда единицы 50 хранения доставляются на (не показанный) упаковочный робот, который по заданному упаковочному образцу грузит единицы 50 хранения на отгрузочный носитель, например, европоддон.
На фиг.16 показана блок-схема 200 способа закладки единиц 50 хранения в стеллаж 30 с несколькими расположенными друг над другом стеллажными уровнями Ei, которые имеют соответственно несколько расположенных рядом друг с другом постановочных мест 46, причем закладка на хранение производится по подводящему/отводящему транспортеру 38, 40, который вдается в стеллажный коридор 36 и соединен по меньшей мере с одним передаточным местом 44, причем каждый стеллажный уровень Ei обслуживается по меньшей мере одним грузозахватным приспособлением 70 транспортного средства 60, причем способ имеет следующие шаги: подвод (шаг S1) единицы 50 хранения по подводящему транспортеру 38, перемещение подведенной единицы 50 хранения с подводящего транспортера 38 на передаточное место 44 в поперечном направлении Z с помощью поперечного перестановщика 150, который выполнен с возможностью перемещения в путь транспортировки подводящего транспортера 38, забор (шаг S2) единицы 50 хранения с передаточного места 44 в продольном направлении Х или в поперечном направлении Z посредством интегрированного в стеллаж подъемника 42 за счет того, что грузозахватное приспособление 162 подъемника 42 горизонтально выдвигается в передаточное место 44, затем вертикально приподнимается, а затем горизонтально вдвигается, предпочтительно при одновременном приведении в действие транспортера 106, который является частью грузоподъемного приспособления 162 подъемника 42, перемещение забранной единицы 50 хранения в вертикальном направлении Y посредством интегрированного в стеллаж подъемника 42, отдача забранной единицы 50 хранения в продольном направлении Х или в поперечном направлении Z на буферное место 48, которое расположено над или под передаточным местом 44, причем буферное место 48 придано стеллажному уровню закладки на хранение, причем буферное место расположено на высоте стеллажного уровня закладки на хранение или по соседству с ним, за счет того, что транспортер 106 грузозахватного приспособления 162 подъемника 42 приводится в действие, как только подъемник 42 достигнет высоты буферного места 48, забор (шаг S3) единицы 50 хранения из буферного места 48 посредством одного из транспортных средств 60 за счет того, что транспортное средство 60 горизонтально перемещается в стеллажном коридоре вдоль стеллажа 30 к вертикальному ряду стеллажа, который имеет передаточное место 44 и буферное место 48, и за счет того, что грузозахватное приспособление 70 транспортного средства 60, если это необходимо, вертикально перемещается на высоту буферного места 48 и за счет того, что затем грузозахватное приспособление 70 транспортного средства 60 горизонтально выдвигается, вертикально приподнимается, а затем снова вдвигается, предпочтительно при одновременном приведении в действие транспортера 106, который является частью грузозахватного приспособления 70 транспортного средства 60, перемещение транспортного средства 60 в горизонтальном направлении Х к другому вертикальному ряду стеллажа, который имеет место для закладки на хранение, и, если это необходимо, вертикальное перемещение грузозахватного приспособления 70 транспортного средства 60 на высоту места для закладки на хранение, и приведение в действие (шаг S4) транспортера 106 грузозахватного приспособления 70 транспортного средства 60 таким образом, что единица 50 хранения перемещается на или в место для закладки на хранение.
Вместо «классических» подъемников 42, у которых грузозахватные приспособления 162 перемещаются вверх и вниз на мачтообразных элементах, могут быть также использованы лифты типа «патерностер», которые, предпочтительно, эксплуатируются только в одном направлении. Это означает, что патерностеры транспортируют только вверх или только вниз.
Челноки 60 также могут работать в режиме «роуминг». При роуминге челноки могут (вертикально) перемещаться между модулями 54, причем предусмотрены соответствующие лифты или же подъемники для челноков. В этом смысле не каждый модуль должен быть максимально занят челноком. Напротив, челноки могут перемещаться между модулями по мере необходимости.
Предпочтительно, каждый стеллаж 30 имеет одинаковое количество стеллажных уровней Ei или же модулей 54, которые имеют соответственно одинаковое вертикальное деление.
Хотя перекрывающие друг друга челноки 60 выше всегда описывались как расположенные на одинаковой высоте (своими ходовыми рельсами 132), подразумевается, что перекрывающие друг друга челноки 60 или же их ходовые рельсы 132 могут быть с вертикальным смещением расположены на противолежащих продольных сторонах 138 стеллажного коридора 36. Этот вид расположения является особенно благоприятным в области подводящих и отводящих транспортеров 38 и 40. Кроме того, челноки 60 могут быть разными по высоте. Это оправдывается, опять же, особенно в области транспортеров 38 и 40, если там определен модуль 54 (включая соответственно адаптированный челнок 60), который, например, содержит только 2 стеллажных уровня Ei Ei, в то время как остальные модули 54 содержат, например, четыре стеллажных уровня Ei.
К описанным на фиг.2, 13 и 15 стеллажным системам 18 могут непосредственно примыкать комплектовочные, упаковочные или аналогичные рабочие места, предпочтительно непосредственно к таким стеллажам, которые находятся снаружи, как например, стеллаж 30-1.
Отдельные стеллажные коридоры 36 посредством компонентов транспортной техники, которые ориентированы по существу в поперечном направлении Z и, например, проходят через стеллажи, могут быть непосредственно связаны с точки зрения техники потока материалов, чтобы сделать возможным охватывающий коридоры обмен единиц 50 хранения без вовлечения подъемников 42.
В вышеприведенном описании фигур при выборе ориентации систем координат, в общем, авторы придерживались обычного в складской логистике обозначения, так что продольное направление стеллажа 30 обозначалось буквой X, глубина стеллажа 30 (или же поперечное направление МОС) буквой Z, а (вертикальная) высота стеллажа 30 буквой Y.
Кроме того, одинаковые детали и признаки снабжались одинаковыми ссылочными обозначениями. Содержащиеся в описании раскрытия являются по смыслу переносимыми на одинаковые детали и признаки с тем же самым ссылочным обозначением. Указания положения и ориентации (например, «вверху», «внизу», «сбоку», «вдоль», «поперек», «горизонтально», «вертикально» и т.п.) относятся к непосредственно описываемой фигуре. При изменении положения или ориентации эти указания должны быть по смыслу перенесены на новое положение или же ориентацию.




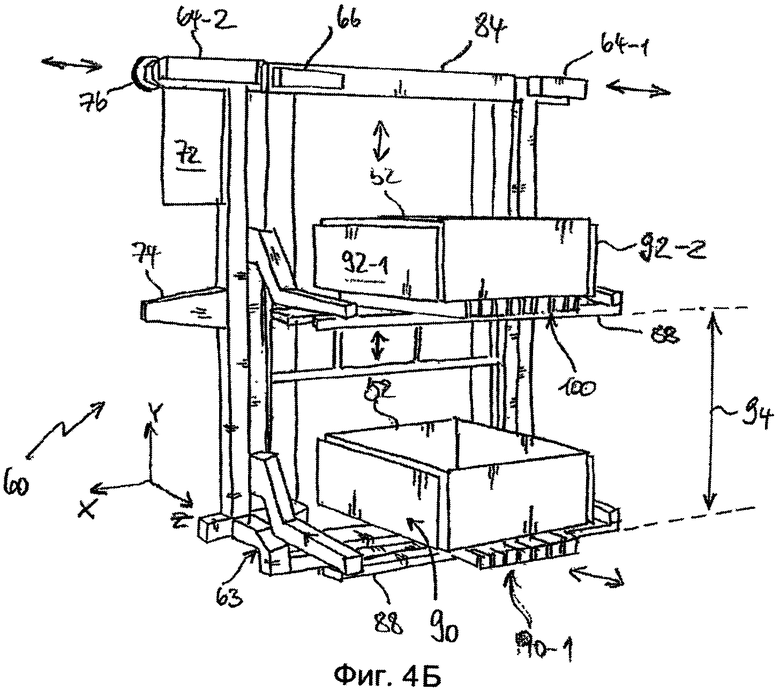



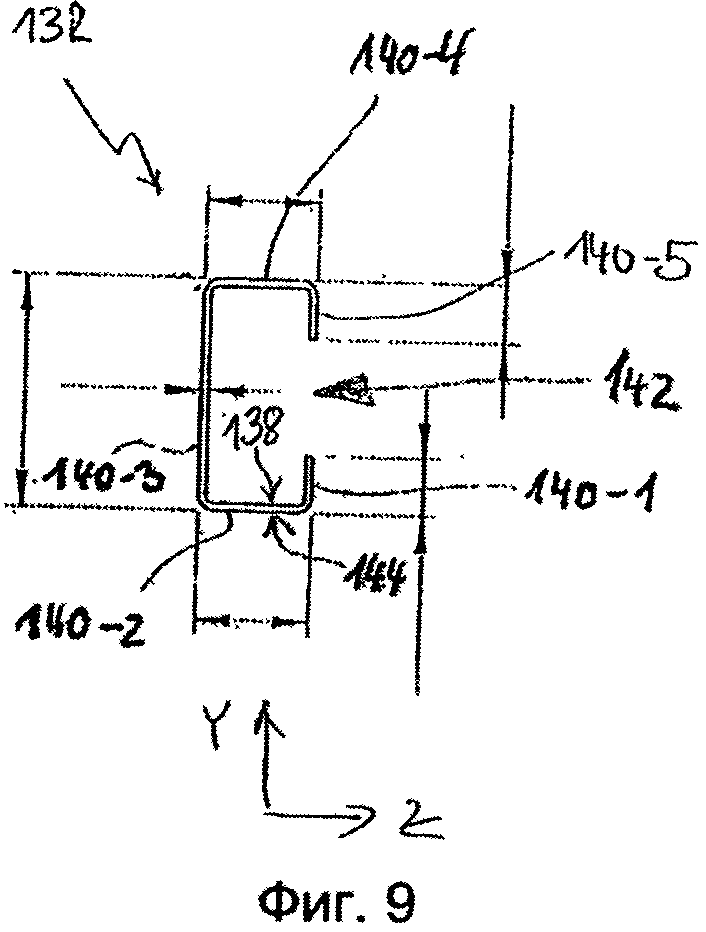

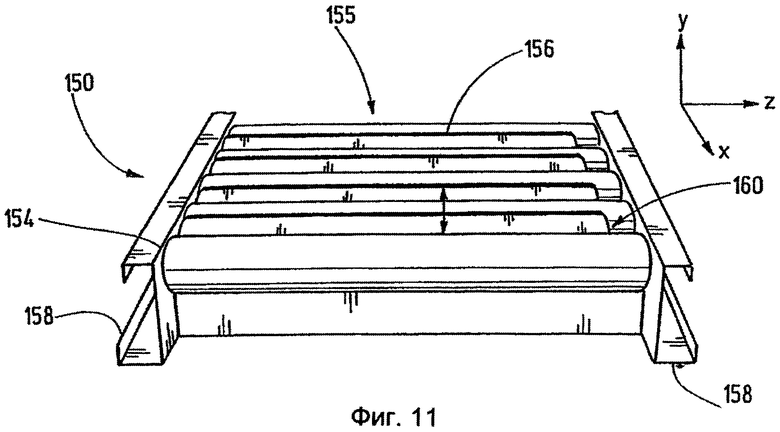


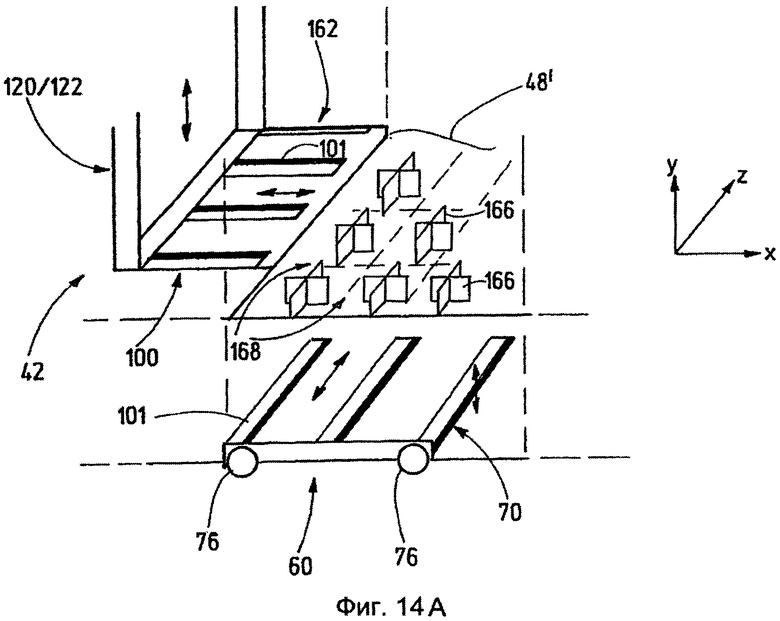

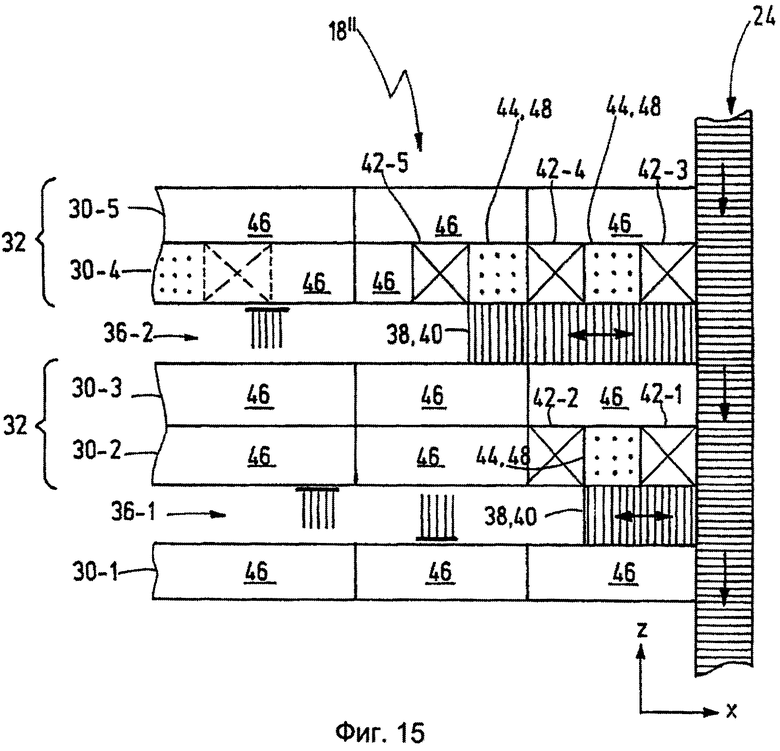

Изобретения касаются способа и системы автоматизированного хранения и комплектования единиц хранения, прежде всего контейнеров мелких деталей. Система имеет стеллажную систему с множеством стеллажей, причем первый и второй стеллаж (30-1, 30-2) образуют между собой стеллажные коридоры (36-1,36-2), множество перемещаемых в стеллажном коридоре, привязанных к стеллажу транспортных средств (60) для закладки и выгрузки единиц хранения в постановочные места и из постановочных мест в поперечном направлении (Z), и, по меньшей мере один интегрированный в стеллаж подъемник с грузозахватным приспособлением. Грузозахватное приспособление подъемника выполнено с возможностью перемещения единицы хранения между интегрированным в стеллаж передаточным местом (44) и по меньшей мере одним интегрированным в стеллаж буферным местом (48. Система также содержит по меньшей мере один транспортер, который через подводящий/отводящий транспортер выступает в стеллажном коридоре и поперечный перестановщик. При реализации способа используется упомянутая выше система. Изобретения обеспечивают повышение производительности. 2 н. и 19 з.п. ф-лы, 16 ил.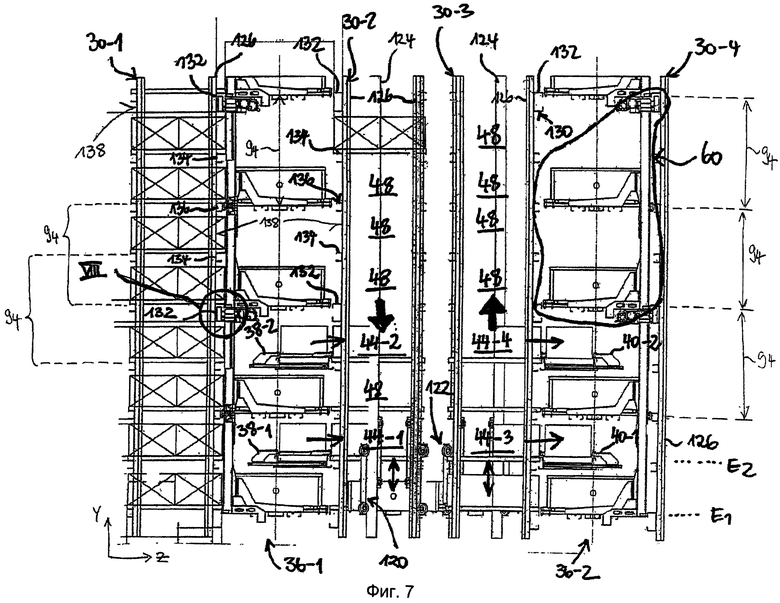
1. Система (10) автоматизированного хранения и комплектования единиц (50) хранения, прежде всего контейнеров (52) мелких деталей, которая имеет:
- стеллажную систему (18) с множеством стеллажей (30), причем каждый стеллаж (30) имеет несколько стеллажных уровней (Ei) один над другим, которые, в свою очередь, соответственно имеют множество расположенных рядом друг с другом постановочных мест (46), причем первый и второй стеллаж (30-1, 30-2) задают между собой стеллажный коридор (36),
- множество перемещаемых в стеллажном коридоре (36), привязанных к стеллажу транспортных средств (60) для закладки и выгрузки единиц (50) хранения в постановочные места и из постановочных мест (46) в поперечном направлении (Z), причем каждое транспортное средство (60) имеет соответственно ходовую часть (62), по меньшей мере один привод (64) движения и по меньшей мере одно грузозахватное приспособление (70), причем в стеллажном коридоре (36) предусмотрено столько транспортных средств (60), что каждый стеллажный уровень (Ei) является обслуживаемым по меньшей мере одним грузозахватным приспособлением (70) одного из транспортных средств (60),
- по меньшей мере один интегрированный в стеллаж подъемник (42) с грузозахватным приспособлением (162), причем грузозахватное приспособление (162) подъемника (42) выполнено для того, чтобы перемещать единицы (50) хранения между интегрированным в стеллаж передаточным местом (44), которое придано по меньшей мере одному интегрированному в стеллаж подъемнику (42), и по меньшей мере одним интегрированным в стеллаж буферным местом (48), причем по меньшей мере одно буферное место (48) расположено только вертикально под или над передаточным местом (44),
- по меньшей мере один транспортер (24), который через подводящий/отводящий транспортер выступает в стеллажном коридоре (36) и там стыкуется с передаточным местом (44), и который транспортирует подлежащие закладке единицы (50) хранения к передаточному месту (44), а подлежащие выгрузке со склада единицы (50) хранения от передаточного места (44), и
- поперечный перестановщик (150), который выполнен и установлен для того, чтобы обменивать единицы (50) хранения между подводящим/отводящим транспортером и передаточным местом (44).
2. Система по п.1, в которой каждое транспортное средство (60) имеет по меньшей мере один ползун (68) с соответственно приданным подъемным приводом (66), причем ползун (68) установлен вертикально подвижно в ходовой части (62), и причем приданный подъемный привод (66) вертикально перемещает ползун (68).
3. Система по п.2, в которой каждое транспортное средство (60) является перемещаемым на стеллаже (30) вдоль горизонтальной направляющей (130), которая, предпочтительно, закреплена только на первом стеллаже (30-1) или на втором стеллаже (30-2), и причем по меньшей мере одно грузозахватное приспособление (70) каждого из транспортных средств (60) установлено горизонтально свободно выступающим на, по существу, вертикально ориентированном ползуне (68) таким образом, что в стеллажном коридоре (36) противолежащие на одинаковой высоте транспортные средства (60) во время продольного движения могут пересекаться, хотя ходовые части (62) противолежащих на одинаковой высоте транспортных средств (60) при пересечении вертикально перекрываются.
4. Система по п.3, в которой направляющие (130) предусмотренных на одинаковой высоте транспортных средств (60) расположены на одинаковой высоте на противолежащих продольных сторонах (138) первого и второго стеллажа (30-1, 30-2).
5. Система по п.3, в которой каждая направляющая (130) имеет профиль, который в горизонтальном направлении (X) стеллажного коридора (36) закреплен на вертикальных стеллажных стойках (126) стеллажей (30), которые обращены к стеллажному коридору (36).
6. Система по п.5, в которой каждая направляющая (130) имеет С-образный профиль (132), внутри (138) которого катятся одно или несколько ходовых колес (76) транспортного средства (60), а снаружи (144) которого установлены, предпочтительно, одно или несколько опорных колес (79) вертикально в соответствующем стеллажном коридоре (36) соседнего транспортного средства (60).
7. Система по п.1, в которой ходовая часть (62) выполнена в виде рамы и имеет по меньшей мере одно ходовое колесо (76), которое связано с приводом (64) движения, и по меньшей мере одно, предпочтительно установленное со свободным вращением, опорное колесо (79), причем по меньшей мере одно ходовое колесо (76) расположено в верхней половине ходовой части (62), а по меньшей мере одно опорное колесо (79) расположено в нижней половине ходовой части (62).
8. Система по п.7, в которой по меньшей мере одно ходовое колесо (76) вращается вокруг горизонтально ориентированной оси (76′), и в которой по меньшей мере одно опорное колесо (79) вращается вокруг вертикально ориентированной оси (79′).
9. Система по п.1, в которой по меньшей мере один подъемник (42-1) расположен во втором стеллаже (30-2) в первом вертикальном ряду стеллажа, который (ряд) граничит со вторым вертикальным рядом стеллажа во втором стеллаже (30-2), в котором (ряду) расположены передаточное место (44′) и по меньшей мере одно буферное место (48′).
10. Система по п.9, в которой другой подъемник (42-2) расположен в третьем вертикальном ряду второго стеллажа (30-2), который (ряд) в продольном направлении (X) граничит со вторым вертикальным рядом стеллажа.
11. Система по п.9, в которой передаточное место (44′) и по меньшей мере одно буферное место (48′) выполнены для того, чтобы в продольном направлении (X) входить в зацепление с грузозахватным приспособлением (162) по меньшей мере одного подъемника (42).
12. Система по п.9, в которой, кроме того, по меньшей мере одно буферное место (48′) выполнено для того, чтобы в поперечном направлении (Z) входить в зацепление с грузозахватными приспособлениями (70) транспортных средств (60).
13. Система по п.9, в которой передаточное место (44′) имеет поперечный перестановщик (150), который выполнен для того, чтобы перемещать единицы (50) хранения в поперечном направлении (Z) без столкновения с грузозахватным приспособлением (162) по меньшей мере одного подъемника (42).
14. Система по одному из пп.1-8, в которой по меньшей мере один подъемник (42) расположен в третьем стеллаже (30-3), который расположен «спина к спине» со вторым стеллажом (30-2), причем передаточное место (44) и по меньшей мере одно буферное место (48) расположены во втором стеллаже (30-2) и противолежат по меньшей мере одному подъемнику (42) в третьем стеллаже (30-3) в поперечном направлении (Z).
15. Система по п.14, в которой передаточное место (44) и по меньшей мере одно буферное место (48) выполнены для того, чтобы в поперечном направлении (Z) входить в зацепление с грузозахватным приспособлением (162) по меньшей мере одного подъемника (42) и с грузозахватными приспособлениями (70) транспортных средств (60).
16. Система по п.14, в которой в третьем стеллаже (30-3) расположен по меньшей мере один другой подъемник (42), который противолежит другому передаточному месту (44) и по меньшей мере одному другому буферному месту (48) во втором стеллаже (30-2).
17. Система по п.1, в которой поперечный перестановщик (155) является ременным подъемником (155), роликовым гребнем (167) или толкателем (152).
18. Система по п.1, в которой каждое грузозахватное приспособление (70, 162) имеет вдвигаемые и выдвигаемые в горизонтальном направлении (X, Z) лапы (100) и боковые транспортеры (108), причем лапы (100), предпочтительно, являются индивидуально вдвигаемыми и выдвигаемыми.
19. Система по п.1, в которой постановочные места (46) выполнены для того, чтобы в поперечном направлении (Z) входить в зацепление с грузозахватными приспособлениями (70) транспортных средств (60).
20. Система по п.1, в которой каждый стеллажный уровень (Ei) стеллажа (30-2, 30-3), который имеет по меньшей мере один подъемник (42), имеет либо передаточное место (44), либо буферное место (48).
21. Способ закладки единицы (50) хранения в стеллаж (30) с несколькими расположенными один над другим стеллажными уровнями (Ei), которые соответственно имеют несколько, расположенных рядом друг с другом постановочных мест (46), по подводящему/отводящему транспортеру (38, 40), который вдается в стеллажный коридор (36) и состыкован по меньшей мере с одним передаточным местом (44), причем каждый стеллажный уровень (Еi) обслуживают по меньшей мере одним грузозахватным приспособлением (70) транспортного средства (60), со следующими шагами:
- подвод единицы (50) хранения по подводящему транспортеру (38),
- перемещение подведенной единицы (50) хранения с подводящего транспортера (38) на передаточное место (44) в поперечном направлении (Z) посредством поперечного перестановщика (150), который выполнен с возможностью перемещения в путь транспортировки подводящего транспортера (38),
- забор единицы (50) хранения с передаточного места (44) в продольном направлении (X) или в поперечном направлении (Z) посредством интегрированного в стеллаж подъемника (42) за счет того, что грузозахватное приспособление (162) подъемника (42) горизонтально выдвигают в передаточное место (44), затем вертикально приподнимают, а затем горизонтально вдвигают, предпочтительно при одновременном приведении в действие транспортера (106), который является частью грузозахватного приспособления (162) подъемника (42),
- перемещение забранной единицы (50) хранения в вертикальном направлении (Y) посредством интегрированного в стеллаж подъемника (42),
- отдача забранной единицы (50) хранения в продольном направлении (X) или поперечном направлении (Z) на буферное место (48), которое расположено над или под передаточным местом (44), причем буферное место (48) придано уровню закладки на хранение, причем буферное место (48) расположено на высоте уровня (Ei) закладки на хранение или по соседству с ним, за счет того, что транспортер (106) грузозахватного приспособления (162) подъемника (42) приводят в действие, как только подъемник (42) достигнет высоты буферного места (48),
- забор единицы (50) хранения из буферного места (48) посредством одного из транспортных средств (60) за счет того, что транспортное средство перемещают горизонтально в стеллажном коридоре вдоль стеллажа (30) к вертикальному ряду стеллажа, который имеет передаточное место (44) и буферное место (48), и за счет того, что грузозахватное приспособление (70) транспортного средства (60), если это требуется, перемещают вертикально на высоту буферного места (48), и за счет того, что затем грузозахватное приспособление (70) транспортного средства (60) горизонтально выдвигают, вертикально приподнимают, а затем снова вдвигают, предпочтительно при одновременном приведении в действие транспортера (106), который является частью грузозахватного приспособления (70) транспортного средства (60),
- перемещение транспортного средства (60) в горизонтальном направлении (X) к другому вертикальному ряду стеллажа, который имеет место для закладки на хранение, и, если это требуется, вертикальное перемещение грузозахватного приспособления (70) транспортного средства (60) на высоту места для закладки на хранение, и
- приведение в действия транспортера (106) грузозахватного приспособления (70) транспортного средства (60) таким образом, что единица (50) хранения перемещается на или в место закладки на хранение.
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| DE20112328 U1, 31 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| WO2010090515 A1, 12.08.2010; | |||
| US 2004197171 A1, 07.10.2004; | |||
| Склад для хранения штучных грузов | 1981 |
|
SU969611A1 |
| СИСТЕМА ДЛЯ ВРЕМЕННОГО ХРАНЕНИЯ ВЕЩЕЙ, В ЧАСТНОСТИ ПРЕДМЕТОВ БАГАЖА | 2004 |
|
RU2381976C2 |

