Изобретение относится к хранению штучных грузов.
Цель изобретения - упрощение конструкции, снижение металлоемкости.
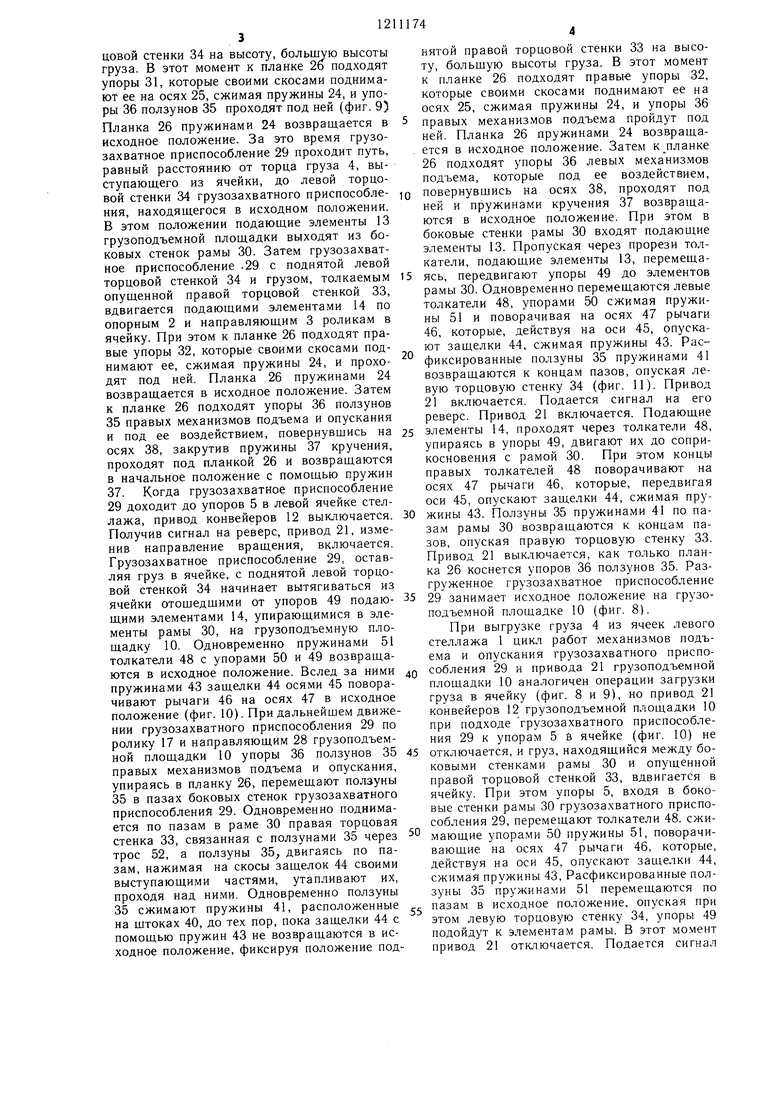
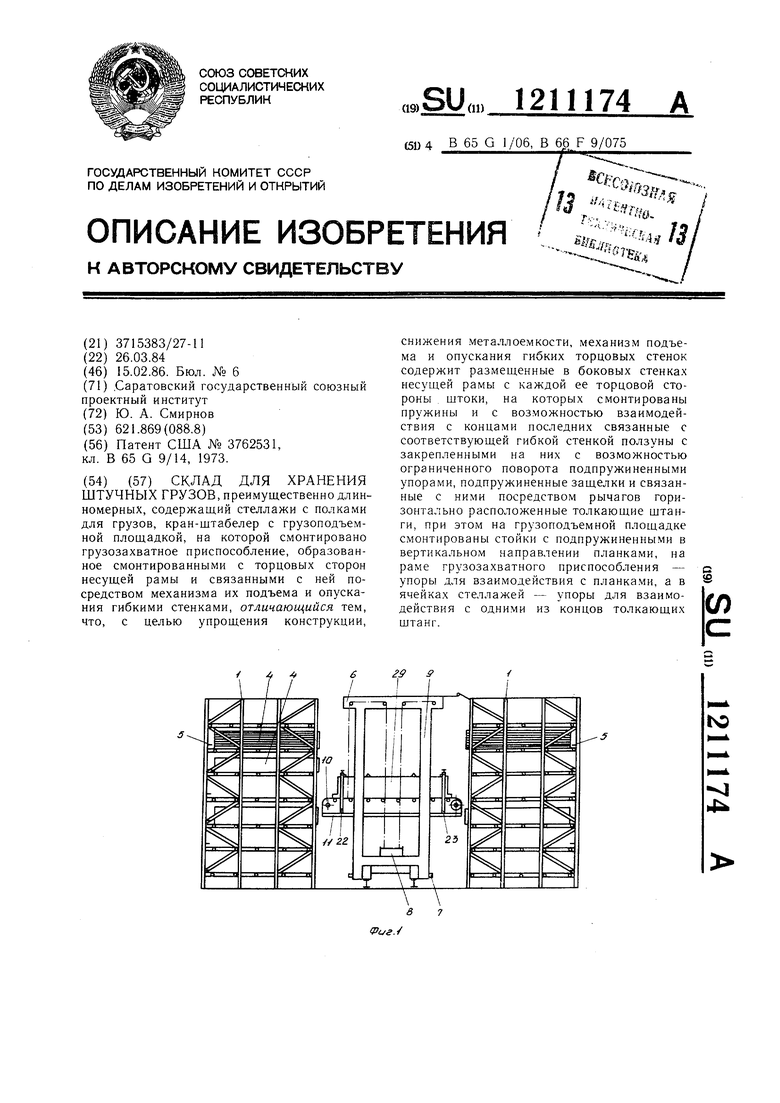
На фиг. 1 схематически показан склад со стеллажными установками, обслуживае- мыми краном-штабелером с грузоподъемной площадкой и грузозахватным приспособлением в исходном положении; на фиг. 2 - грузоподъемная площадка с грузозахватным приспособлением в исходном положении, вид сверху; на фиг. 3 - сечение по перемычкам рамы грузозахватного приспособления; на фиг. 4 - сечение вдоль боковой стенки грузозахватного приспособления; на фиг. 5 - сечение по ползуну грузозахватного приспособления; на фиг. 6 - вид на крепление к ползуну торцовой стенки в исходном положении; на фиг. 7 - сечение по раме грузозахватного приспособления вдоль торцовой стенки; на фиг. 8 - грузоподъемная площадка с грузозахватным при- способлением, общий вид, в исходном положении; на фиг. 9 - то же, в момент окончания подъема левой торцовой стенки ; на фиг. 10 - то же, в момент начала вытягивания грузозахватного приспособления из ячейки стеллажа без груза; на фиг. 11 - то же, в момент окончания вытягивания грузозахватного приспособления на грузоподъемную площадку; на фиг. 12 - то же, в момент окончания опускания торцовой стенки за грузом, находящимся в ячейке.
Склад содержит стеллажи 1 с опорными 2 и направляющими 3 роликами, грузом 4 и упорами 5, установленными в ячейках. Стеллажи обслуживаются краном-штабелером 6, снабженным приводом 7 горизонтального перемещения и приводом 8 вертикального перемещения в направляющих 9 грузо- подъемной площадки 10, размещенной перпендикулярно оси прохода.
Грузоподъемная площадка 10 содержит раму 11, на которой смонтированы конвейеры 12. К тяговому органу конвейера 12 прикреплены подающие элементы 13 и 14, имеющие прорези.
Звездочки 15 и 16 конвейеров и ролики 17 установлены на осях 18 и 19, проходящих через раму. Ось 19 через муфту 20 связана.с приводом 21 конвейеров. К стойкам 22 и 23 рамы прижаты пружины 24, установленные на осях 25, планки 26 и 27. На раме размещены направляющие 28, на которых установлено грузозахватное приспособление 29.
Грузозахватное приспособление 29 включает в себя несущую пространственную раму 30, состоящую из двух параллельно расположенных боковых стенок, имеющих П-образное сечение, на которых закреплены упоры 31 и 32 со скосами. Стенки связаны перемычками. Во внутренних полостях боковых стенок размещены правые и левые
механизмы подъема и опускания правой 33 и левой 34 торцовых стенок.
Механизм подъема и опускания состоит из установленного в пазах боковой стенки ползуна 35 с упором 36, прижатым пружиной 37 кручения и поворачивающимся на оси 38 только в сторону, показанную стрелкой. В ползуне щтифтом 39 закреплен щток 40, проходящий через пружину 41 и перегородку 42. Для фиксации положения ползуна внутри боковой стенки размещены с пружиной 43 сжатия защелка 44 с осью
45,входящей в паз рычага 46, установленного на оси 47, нижняя часть которого касается конца толкателя 48 в виде щтанги упорами 49 и 50. Упор 50 прижат пружиной 51 к элементу рамы.
Торцовая стенка состоит, например, из троса 52, проходящего через проущины двух ползунов, размещенных в боковых стенках рамы, и трубчатЕ х элементов 53, размещенных в пазах боковых стенок рамы. На тросе установлены ограничители 54 и зажимы 55.
Склад работает следующим образом.
Для загрузки груза 4 в стеллаж 1 грузозахватное приспособление 29 с грузом, расположенным между боковыми стенками рамы 30 и торцовыми стенками 33 и 34, лежащими на направляющих 28 грузоподъемной площадки 10 крана-щтабелера 6, приводом 7 горизонтального перемещения и приводом 8 вертикального перемещения по направляющим 9 подается к соответствующей ячейке, например левого стеллажа 1.
В исходном положении, когда расстояние от левого стеллажа 1 до торцовой левой стенки (опущенной) 34 грузоподъемного приспособления 29 равно высоте ячейки, включается привод 21 конвейеров 12. Подающими элементами 14, прижимающими упоры 49 к раме 30, передвигая правые толкатели 48, которые упорами 50 сжимают пружины 51, поворачивают на осях 47 рычаги
46,которые, действуя на оси 45, опускают защелки 44, сжимая пружины 43 (фиг. 8), грузозахватное приспособление 29 по направляющим 28 и ролику 17 рамы И грузоподъемной плопдадки 10 передвигается влево. При этом упоры 36 ползунов 35 левых механизмов подъема и опускания, упираясь в планку 26, перемещают ползуны 35 в пазах боковых стенок грузозахватного приспособления 29. Одновременно поднимается по пазам в раме 30 левая торцовая стенка 34, связанная с ползунами 35 через трос 52, а ползуны 35, двигаясь по пазам, нажимая на скосы защелок 44 своими выступающими частями, утапливают их, сжимая пружины 43, и проходя над ними. Одновременно ползуны 35 сжимают пружины 41, расположенные на щтоках 40 до тех пор, пока защелки 44 с помощью пружины 43 не возвращаются в начальное положение, фиксируя положение поднятой левой TOOцовой стенки 34 на высоту, большую высоты груза. В этот момент к планке 26 подходят упоры 31, которые своими скосами поднимают ее на осях 25, сжимая пружины 24, и упоры 36 ползунов 35 проходят под ней (фиг. 9) Планка 26 пружинами 24 возвращается в исходное положение. За это время грузозахватное приспособление 29 проходит путь, равный расстоянию от торца груза 4, выступающего из ячейки, до левой торцовой стенки 34 грузозахватного приспособле- ния, находящегося в исходном положении. В этом положении подающие элементы 13 грузоподъемной площадки выходят из боковых стенок рамы 30. Затем грузозахватное приспособление .29 с поднятой левой торцовой стенкой 34 и грузом, толкаемым опущенной правой торцовой стенкой 33, вдвигается подающими элементами 14 по опорным 2 и направляющим 3 роликам в ячейку. При этом к планке 26 подходят правые упоры 32, которые своими скосами поднимают ее, сжимая пружины 24, и проходят под ней. Планка 26 пружинами 24 возвращается в исходное положение. Затем к планке 26 подходят упоры 36 ползунов 35 правых механизмов подъема и опускания и под ее воздействием, повернувшись на осях 38, закрутив пружины 37 кручения, проходят под планкой 26 и возвращаются в начальное положение с помощью пружин 37. Когда грузозахватное приспособление 29 доходит до упоров 5 в левой ячейке стеллажа, привод конвейеров 12 выключается. Получив сигнал на реверс, привод 21, изменив направление вращения, включается. Грузозахватное приспособление 29, оставляя груз в ячейке, с поднятой левой торцовой стенкой 34 начинает вытягиваться из ячейки отощедщими от упоров 49 подаю- щими элементами 14, упирающимися в элементы рамы 30, на грузоподъемную площадку 10. Одновременно пружинами 51 толкатели 48 с упорами 50 и 49 возвращаются в исходное положение. Вслед за ними пружинами 43 защелки 44 осями 45 поворачивают рычаги 46 на осях 47 в исходное положение (фиг. 10). При дальнейшем движении грузозахватного приспособления 29 по ролику 17 и направляющим 28 грузоподъемной площадки 10 упоры 36 ползунов 35 правых механизмов подъема и опускания, упираясь в планку 26, перемещают ползуны 35 в пазах боковых стенок грузозахватного приспособления 29. Одновременно поднимается по пазам в раме 30 правая торцовая стенка 33, связанная с ползунами 35 через трос 52, а ползуны 35, двигаясь по пазам, нажимая на скосы защелок 44 своими выступающими частями, утапливают их, проходя над ними. Одновременно ползуны 35 сжимают пружины 41, расположенные на штоках 40, до тех пор, пока защелки 44 с помощью пружин 43 не возвращаются в исходное положение, фиксируя положение поднятой правой торцовой стенки 33 на высоту, большую высоты груза. В этот момент к планке 26 подходят правьге упоры 32, которые своими скосами поднимают ее на осях 25, сжимая пружины 24, и упоры 36 правых механизмов подъема пройдут под ней. Планка 26 пружинами 24 возвращается в исходное положение. Затем к планке 26 подходят упоры 36 левых механизмов подъема, которые под ее воздействием, повернувщись на осях 38, проходят под ней и пружинами кручения 37 возвращаются в исходное положение. При этом в боковые стенки рамы 30 входят подающие элементы 13. Пропуская через прорези толкатели, подающие элементы 13, перемещаясь, передвигают упоры 49 до элементов рамы 30. Одновременно перемещаются левые толкатели 48, упорами 50 сжимая пружины 51 и поворачивая на осях 47 рычаги 46, которые, действуя на оси 45, опускают защелки 44, сжимая пружины 43. Рас- фиксированные ползуны 35 пружинами 41 возвращаются к концам пазов, опуская левую торцовую стенку 34 (фиг. 11). Привод 21 включается. Подается сигнал на его реверс. Привод 21 включается. Подающие элементы 14, проходят через толкатели 48, упираясь в упоры 49, двигают их до соприкосновения с рамой 30. При этом концы правых толкателей 48 поворачивают на осях 47 рычаги 46, которые, передвигая оси 45, опускают защелки 44, сжимая пружины 43. Ползуны 35 пружинами 41 по пазам рамы 30 возвращаются к концам пазов, опуская правую торцовую стенку 33. Привод 21 выключается, как только планка 26 коснется упоров 36 ползунов 35. Разгруженное грузозахватное приспособление 29 занимает исходное положение на грузоподъемной площадке 10 (фиг. 8).
При выгрузке груза 4 из ячеек левого стеллажа 1 цикл работ механизмов подъема и опускания грузозахватного приспособления 29 и привода 21 грузоподъемной площадки 10 аналогичен операции загрузки груза в ячейку (фиг. 8 и 9), но привод 21 конвейеров 12 грузоподъемной площадки 10 при подходе грузозахватного приспособления 29 к упорам 5 и ячейке (фиг. 10) не отключается, и груз, находящийся между боковыми стенками рамы 30 и опущенной правой торцовой стенкой 33, вдвигается в ячейку. При этом упоры 5, входя в боковые стенки рамы 30 грузозахватного приспособления 29, перемещают толкатели 48. сжимающие упорами 50 пружины 51, поворачивающие на осях 47 рычаги 46, которые, действуя на оси 45, опускают защелки 44, сжимая пружины 43, Расфиксированные ползуны 35 пружинами 51 перемещаются по пазам в исходное положение, опуская при этом левую торцовую стенку 34, упоры 49 подойдут к элементам рамы. В этот момент привод 21 отключается. Подается сигнал
на его реверс. Привод 11, изменив направление вращения, отключается, и подающие элементы 14, отойдя от упоров 49, упираясь к элементам рамы 30, выдвигают грузозахватное приспособление 29 (фиг. 12). Груз 4, находящийся на опорных роликах 2 стеллажа I, расположенный между боковыми стенками рамы 30, выдвигается из ячейки с помощью опущенной за ним левой торцовой стенки 34 грузозахватного приспособления 29 по опорным роликам 2 на грузоподъемную площадку 10.
При установке грузозахватного приспособления 29 в исходное положение с взятым из левой ячейки грузом 4 на грузоподъемной площадке 10 цикл работы механизмов подъема и опускания, привода 21 конвейеров 12 и подающих элементов 13 и 14 аналогичен операции возвращения разгруженного грузозахватного приспособления 29 в исходное положение на грузоподъемную площадку (фиг. 8).
Из исходного положения (фиг. 8) грузозахватное приспособление с грузом или без него с помощью привода 8 вертикаль- ного перемещения и привода 17 горизонтального перемещения крана-штабелера 6 подается к местам выгрузки или загрузки груза грузозахватное приспособление 29, представляющее собой открытые сверху 10 для укладки в них груза подъемно-транспортными механизмами ячейки стеллажа.
Цикл загрузки и выгрузки его из грузозахватного приспособления 29 аналогичен операциям загрузки и выгрузки груза из ячеек стеллажа.
При загрузке и вырузке из ячеек правого стеллажа 1 грузов цикл аналогичен этим же операциям, описанным для левого стеллажа.
15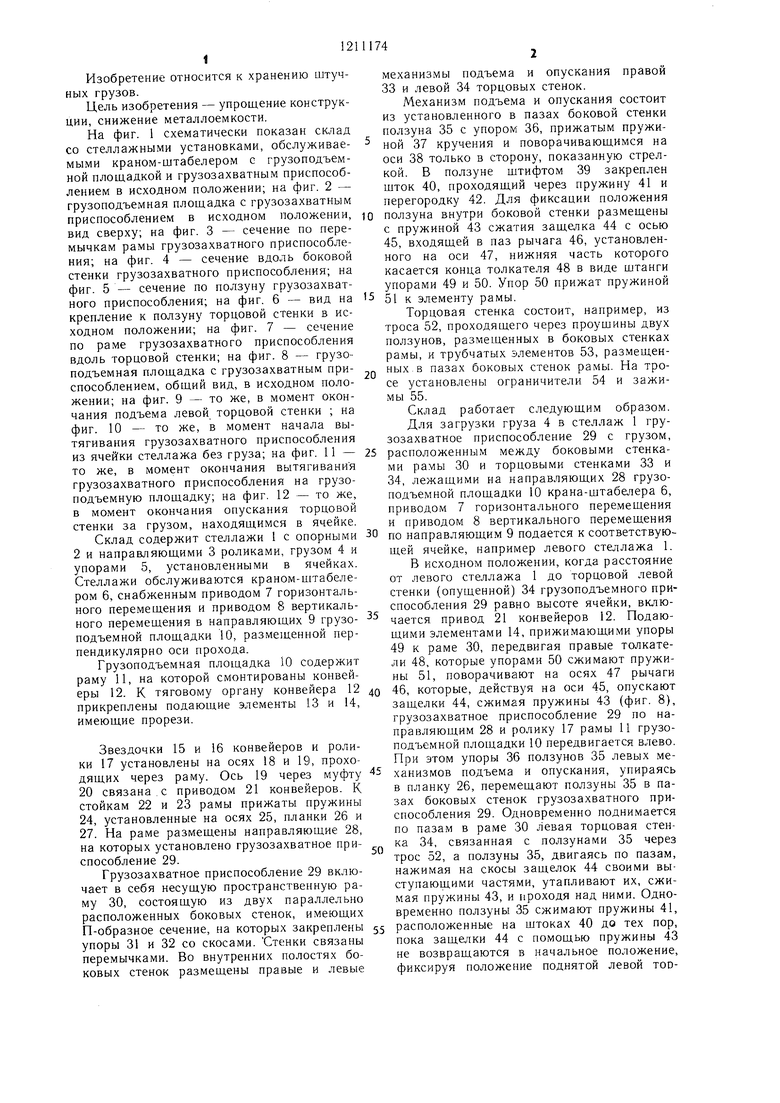

| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1985 |
|
SU1324958A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Контейнер для транспортирования штучных грузов и устройство для его разгрузки | 1988 |
|
SU1602801A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU787314A1 |
| Грузоподъемная площадка крана штабелера | 1985 |
|
SU1315367A1 |
| Крановый захват-кантователь | 1986 |
|
SU1386536A1 |

/7
/ 2S 2S гд 2S 2S 2S 2S 26
V У У У У У / /УФие.2.
/г /7
г/
Фиг.
34 26 24 25 «4 J/ 43 .6 41 2 а.о 30 32 2733
/5 4§ 50 51 48 5 4.7
cpuffA
W
38
39 47 35
cpus 5
36
gcpus. 6
55
,55
J4 26 36 35
30 4644 43 50 33
rJ
т 40/-- V
iw)
28
4/ 4 7 V /
. i
3H- 3536 2S 2lt.:Sl /
J5 /
/
5/ LL
47 4l/7 5 В1 50
(pus. /0
26 2 гВ 3d ,J5 4,5 4- J/ 4/ 4/7 4/ J J5 44 43 jj
4
;j 4 5Z 5/ 4i 46; //
J(7
f
j5 45 44 47 4/
33- J(7
5 4,9.4 50 51 45 46
10
(Составитель Г. Сарычева
Техред И. ВересКорректор Е. Рошко
Тираж 833Подписное
ВНИИПИ ГосударстЕ1енного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Патент США № 3762531, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
