Изобретение относится к транспортным перегрузочным устройствам и может найти применение для автоматизации технологических процессов при производстве изделий из длинномерного профильного проката (швеллер, уголок и др.). который перед обработкой требует поворота в заданное положение.
Цель изобретения - расширение технологических возможностей путем обеспечения переориентации обЬекта и повышение надежности при его транспортировке.
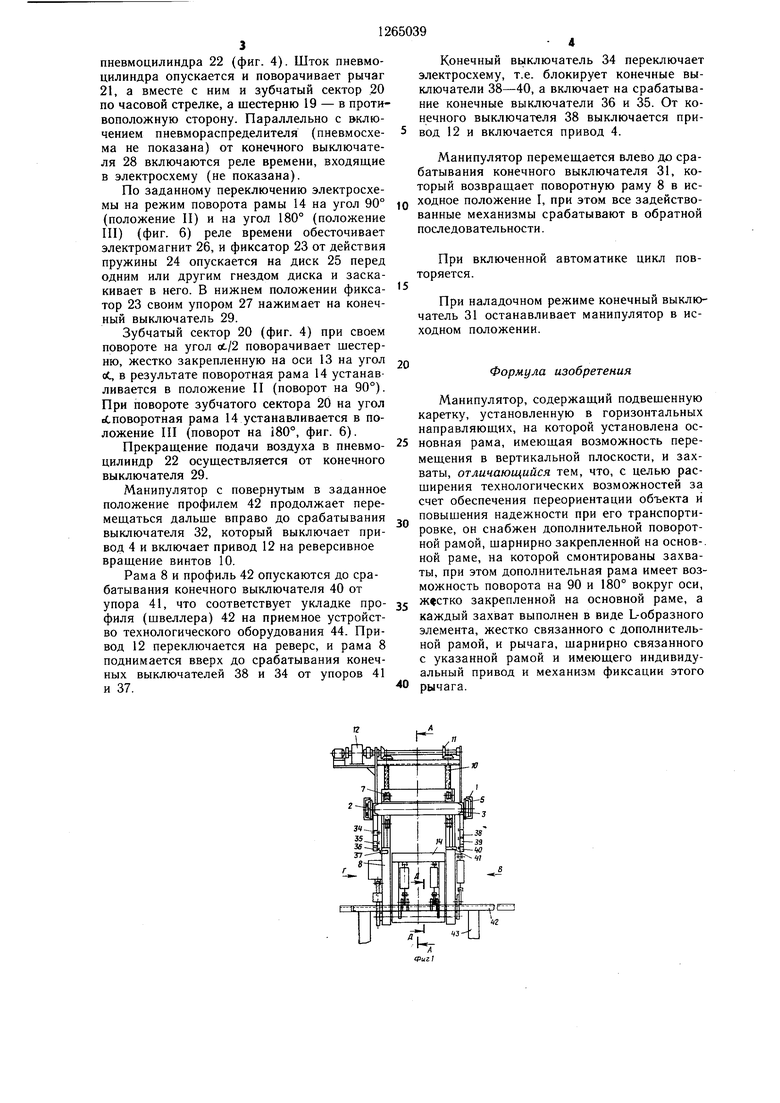
На фиг. 1 показан манипулятор, вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - вид Г на фиг. 1; на фиг. 6 - сечение Д-Д на фиг. 1.
Манипулятор содержит направляющие 1, перемещающуюся по ним на катках 2 каретку 3, цепной привод 4 для перемещения каретки 3 посредством двух цепей 5 (фиг. 2) и водила 6 (фиг. 3) в горизонтальной плоскости.
На каретке 3 смонтирована и перемещается на катках 7 вверх и вниз П-образная основная рама 8 по направляющим 9 посредством винтов 10, приводимых во вращение коническими передачами 11 от привода 12 (фиг. 1 и 2). Внутри рамы 8 на осях 13 смонтирована поворотная рама 14 (фиг. 1, 2 и 4), на которой имеются две опорные L-образные пластины 15, два прижимных рычага 16, вращающихся на своих осях 17, и два пневмоцилиндра 18 (фиг. 2, 4 и 6).
Справа на раме 8 смонтирован механизм поворота рамы 14, состоящий из шестерни 19 зубчатого сектора 20 с жестко закрепленным на нем рычагом 21, шарнирно соединенным со штоком пневмоцилиндра 22 (фиг. 4).
Слева на раме 8 смонтирован фиксатор 23, который принудительно от действия пружины 24 входит в гнездо диска 25, неподвижно закрепленного на оси 13 (фиг. 5).
Управляется фиксатор 23 посредством электромагнита 26. Контроль положения фиксатора 23 осуществляется от упора 27 конечными выключателями 28 и 29 (фиг. 5). Поворотная рама 14 может поворачиваться и занимать три положения I, II и III (фиг. 2 и 6).
На направляющих 1 (фиг. 2) установлены с возможностью переналадки вдоль рамы три конечных выключателя 30-32, действующих от упора 33, закрепленного на каретке 3. На последней слева (фиг. 1) установлены три конечных выключателя 34- 36, которые работают от упора 37, находящегося на раме 8, и управляющие подъемом рамы 8, а справа - аналогичные конечные выключатели 38-40 и упор 41, управляющие опусканием рамы 8.
Исходным положением манипулятора является его среднее положение на направляющих 1 (фиг. 2), когда нажат конечный выключатель 31 от упора 33, расположенного на каретке 3.
Все механизмы обесточены.
Манипулятор работает следующим образом.
При включении манипулятора в работу его каретка 3 на катках 2 перемещается влево (фиг. 2) по направляющим 1 посредством двух цепей 5 и водила 6 приводом 4 до срабатывания конечного выключателя 30 от упора 33, причем рама 8 находится в нижнем положении, т.е. нажат конечный выключатель 36 от упора 37, а поворотная рама 14 находится в положении I. Это положение соответствует тому, что опорные L-образные пластины 15 с некоторым зазором подведены под длинномерный профиль 42 (в данном случае швеллер) находящийся на стеллаже 43 (фиг. 2).
Срабатывание конечного выключателя 30 вызывает выключение привода 4 и включение привода 12 конических передач 11. Начинают вращаться винты 10, и рама 8 своими направляющими 9 между катками 7 поднимается вверх, при этом конечным выключателем 35 от упора 37 включается пневмосистема подачи воздуха в нижнюю полость пневмоцилиндра 18 (фиг. 2). Шток пневмоцилиндра 18 втягивается, увлекая за собой конец рычага 16, который поворачивается вокруг оси 17 и прижимает профиль Q 42 к опорным пластинам 15.
В верхнем положении рамы 8 включаются конечные выключатели 34 и 38 от упоров 37 и 41.
Конечный выключатель 38 переключает электросхему, т.е. блокирует конечные выключатели 34-36, а включает в соответствии с заданной программой на срабатывание конечных выключатели 39 и 40 в определенной последовательности.
От конечного выключателя 34 выключается привод 12 и включается привод 4 на перемещение каретки 3 вправо.
При необходимости поворот профиля 42 вокруг продольной оси на угол 90° (положение И) или на УГОЛ 180° (положение III) задается заранее путем переключения элект5 росхемы от конечного выключателя 31, расположенного так, что габаритные условия для поворота рамы 14 (а вместе с ней и профиля 42) более благоприятны. Во время движения манипулятора происходит поворот рамы 14.
0 Механизм поворота рамы 14 следующий. При срабатывании конечного выключателя 31 подается напряжение на электромагнит 26, который вытягивает из гнезда диска 25 фиксатор 23, растягивая пружину 24.
В свою очередь фиксатор 23 упором 27 воздействует на конечный выключатель 28, который через пневмораспределитель переключает сжатый воздух в верхнюю полость
пневмоцилиндра 22 (фиг. 4). Шток пневмоцилиндра опускается и поворачивает рычаг 21, а вместе с ним и зубчатый сектор .20 по часовой стрелке, а шестерню 19 - в противоположную сторону. Параллельно с включением пневмораспределителя (пневмосхема не показана) от конечного выключателя 28 включаются реле времени, входящие в электросхему (не показана).
По заданному переключению электросхемы на режим поворота рамы 14 на угол 90° (положение И) и на угол 180° (положение III) (фиг. 6) реле времени обесточивает электромагнит 26, и фиксатор 23 от действия пружины 24 опускается на диск 25 перед одним или другим гнездом диска и заскакивает в него. В нижнем положении фиксатор 23 своим упором 27 нажимает на конечный выключатель 29.
Зубчатый сектор 20 (фиг. 4) при своем повороте на угол ос/2 поворачивает шестерню, жестко закрепленную на оси 13 на угол оС, в результате поворотная рама 14 устанавливается в положение II (поворот на 90°). При повороте зубчатого сектора 20 на угол ьСповоротная рама 14 устанавливается в положение III (поворот на 180°, фиг. 6).
Прекращение подачи воздуха в пневмоцилиндр 22 осуществляется от конечного выключателя 29.
Манипулятор с повернутым в заданное положение профилем 42 продолжает перемещаться дальще вправо до срабатывания выключателя 32, который выключает привод 4 и включает привод 12 на реверсивное вращение винтов 10.
Рама 8 и профиль 42 опускаются до срабатывания конечного выключателя 40 от упора 41, что соответствует укладке профиля (швеллера) 42 на приемное устройство технологического оборудования 44. Привод 12 переключается на реверс, и рама 8 поднимается вверх до срабатывания конечных выключателей 38 и 34 от упоров 41 и 37.
Конечный выключатель 34 переключает электросхему, т.е. блокирует конечные выключатели 38-40, а включает на срабатывание конечные выключатели 36 и 35. От конечного выключателя 38 выключается привод 12 и включается привод 4.
Манипулятор перемещается влево до срабатывания конечного выключателя 31, который возвращает поворотную раму 8 в исходное положение I, при этом все задействованные механизмы срабатывают в обратной последовательности.
При включенной автоматике цикл повторяется.
При наладочном режиме конечный выключатель 31 останавливает манипулятор в исходном положении.
Формула изобретения
Манипулятор, содержащий подвешенную каретку, установленную в горизонтальных направляющих, на которой установлена основная рама, имеющая возможность перемещения в вертикальной плоскости, и захваты, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения переориентации объекта и повышения надежности при его транспортировке, он снабжен дополнительной поворотной рамой, шарнирно закрепленной на основ-, ной раме, на которой смонтированы захваты, при этом дополнительная рама имеет возможность поворота на 90 и 180° вокруг оси, жестко закрепленной на основной раме, а каждый захват выполнен в виде L-образного элемента, жестко связанного с дополнительной рамой, и рычага, шарнирно связанного с указанной рамой и имеющего индивидуальный привод и механизм фиксации этого рычага.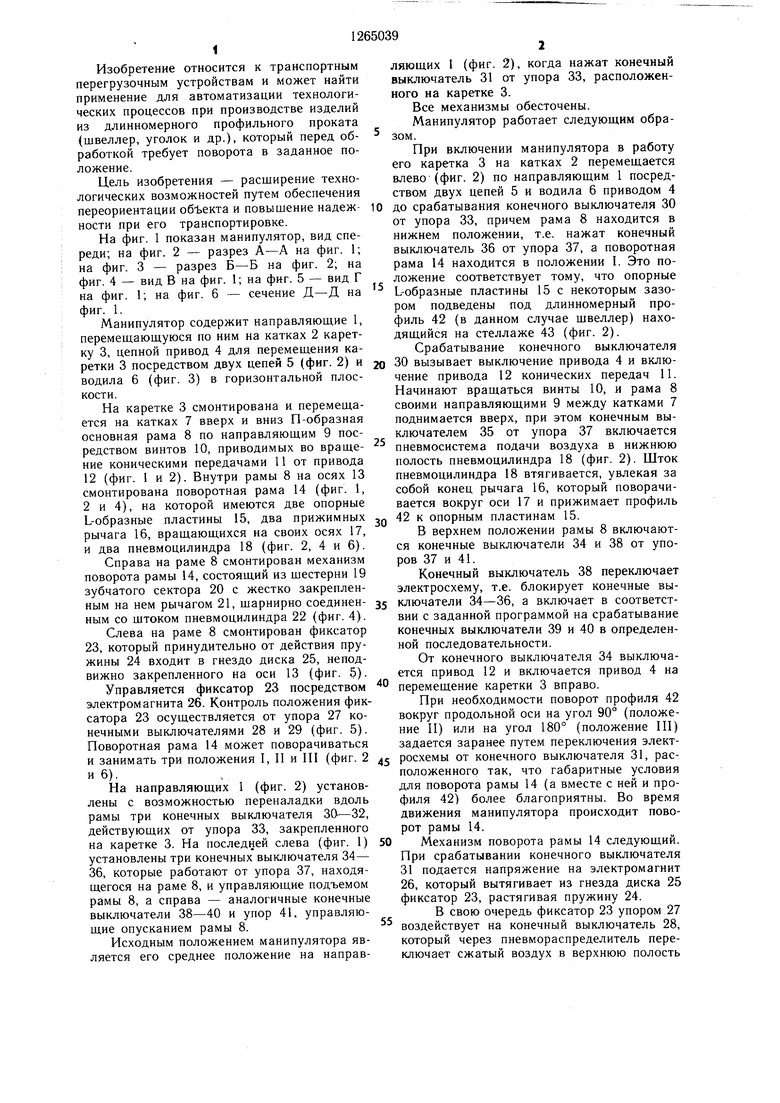
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1313687A1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Способ изготовления обрезиненного кордного полотна и устройство для его осуществления | 1977 |
|
SU736866A3 |
| Установка для контактной точечной сварки | 1988 |
|
SU1600938A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС ПЕРЕДНЕЙ ПОДВЕСКИ | 2000 |
|
RU2177147C1 |
| Способ упаковки ванн в тару,тара для упаковки ванн и устройство для упаковки ванн в тару | 1980 |
|
SU1114603A1 |
| ТЕРМОРАДИАЦИОННАЯ СУШИЛКАВСЕСОЮЗНАЯ | 1970 |
|
SU271375A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Устройство для отбора металлокордных заготовок с диагонально-резательной машины | 1973 |
|
SU480575A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
Манипулятор предназначен для транспортирования и кантования вокруг продольной оси длинномерного профильного проката и может быть встроен в технологическую автоматическую линию. Манипулятор содержит каретку 3, перемещающуюся по горизонтальным направляющим 1 с помощью цепного привода 4, на которой установлена основная рама 8, перемещающаяся в вертикальной плоскости по направляющим 9 посредством винтового привода, включающего БИНТЫ 10 и конические передачи П. Внутри П-образной рамы 8 смонтирована поворотная вокруг оси рама 14, на которой установлены два захвата, включающие каждый опорную L-образную пластину 15, прижимной рычаг 16, управляемый пневмоцилиндром 18. На одном конце оси 13 смонтирован механизм поворота рамы 14, а на другом - механизм фиксации ее в трех пос ложениях. 6 ил.
| Манипулятор | 1979 |
|
SU861225A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Манипулятор | 1979 |
|
SU891428A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
