Область техники, к которой относится изобретение
Настоящее раскрытие относится в целом к системе и методу управления рабочим оборудованием на машине. Точнее, система включает в себя рабочее оборудование машины, измерительный датчик, настроенный так, чтобы предоставлять измерительный сигнал рабочего оборудования, показывающий скорость рабочего оборудования машины, и контроллер, настроенный так, чтобы принимать измерительный сигнал рабочего оборудования, принимать сигнал управления оператора и определять скорректированный сигнал управления оператора, основанный на измерительном сигнале рабочего оборудования и сигнале управления оператора.
Уровень техники
Такие машины как тракторы или бульдозеры снабжены навесным рабочим оборудованием для выполнения различных задач. Например, трактор может иметь нож для соскабливания грунта и толкания материала. Оператор может перемещать положение ножа вверх и вниз относительно поверхности. Это помогает трактору выполнить задачу правильной регулировки уровня и оконтуривания поверхности, на которой работает трактор. Такая задача часто выполняется при строительстве дорог, зданий или других конструкций.
Одна из сложностей, возникающих перед трактором, заключается в том, что при движении трактора по неровной местности нож поднимается и опускается вместе с трактором, который поднимается и опускается при движении по местности. Например, если трактор наезжает на бугор, то передняя его часть поднимается, и, соответственно, поднимается нож трактора. В результате нож копает более мелко, чем если бы трактор находился на горизонтальной поверхности.
Наоборот, если передняя часть трактора опускается вниз, то и нож тоже опускается вниз. До тех пор пока оператор не подкорректирует движение, опускание ножа приведет к погружению ножа в землю на большую глубину, чем необходимо.
Во время движения трактора по неровной местности операторы трактора могут вводить поправку на неровность местности путем корректирования движения ножа. Например, если оператор чувствует, что трактор поднимается или будет подниматься, то оператор может дать команду ножу опуститься вниз, чтобы компенсировать движение трактора, что позволит получить более гладкую поверхность. Однако качество полученной поверхности зависит от мастерства оператора в предугадывании необходимости осуществления корректировки положения ножа. Оператору может потребоваться снизить скорость машины для того, чтобы лучше подгонять положение ножа к неровной поверхности, что снижает эффективность машины и может увеличить стоимость работ.
Для получения более равномерного результата существуют системы и способы для автоматической корректировки положения рабочего оборудования, такого как нож на тракторе. Например, чтобы автоматически корректировать положение ножа для получения желаемого результата, системы могут создавать карту строительной площадки с целевыми установками, которая подается на датчики машины. Эти системы могут получить желаемые результаты, но могут быть очень дорогостоящими. Кроме того, часто законченная поверхность должна быть точно определена до того, как начнется работа, вместо того, чтобы предоставить возможность корректировки в процессе продвижения работы на площадке. Желательно иметь такую систему, которая еще позволяет получить более ровный результат, чем результат, получаемый только корректировкой, осуществляемой оператором, но при этом не требующую такого дорогого оборудования и систем управления, как многие системы при существующем уровне техники грейдерных систем. Наличие системы должно позволить получить большую эффективность, чем при отсутствии управления на машине.
Патент США №7121355 Лампкинса и др. (далее [Лампкинс]) раскрывает систему для управления положением ножа машины для грейдеровки. В [Лампкинс] система управления определяет разницу между целевым положением ножа и фактическим положением и генерирует управляющий сигнал, вычисляемый так, чтобы переместить нож в целевое положение.
Несмотря на то, что система, раскрытая в [Лампкинс], имеет целью более точно управлять положением ножа, компенсации, осуществляемой системой [Лампкинс], может быть недостаточно из-за того, что оператор может управлять рабочим оборудованием машины в предвидении неровной местности. Система, раскрытая в [Лампкинс], не различает электронными средствами разницу между ситуациями, когда оператор пытается переместить нож в новое целевое положение и когда оператор просто пытается внести поправку на неровность поверхности. Следовательно, система [Лампкинс] требует наличия отдельного рычага, управляемого оператором, который или указывает системе вернуть нож в целевое положение или указывает системе, что оператор пытается получить приоритет над системой управления и переместить нож в новое целевое положение.
Желательно иметь такую систему управления, которую проще эксплуатировать и которая корректирует скорость перемещения рабочего оборудования в условиях неровной поверхности, в то же время распознавая, что одновременно оператор может отдавать рабочему оборудованию команды, имеющие ту же цель, что система управления. Более того, желательно иметь такую систему управления рабочим оборудованием машины, которая позволяет получить более гладкую поверхность или контур без необходимости знания или вычисления фактического целевого положения рабочего оборудования.
Настоящее описание направлено на преодоление или смягчение одной или более задач, изложенных выше.
Раскрытие изобретения
В одном аспекте раскрыта система управления машиной. Система управления включает в себя датчик, настроенный так, чтобы предоставлять измерительный сигнал рабочего оборудования, показывающий скорость рабочего оборудования машины, и контроллер, настроенный так, чтобы принимать измерительный сигнал рабочего оборудования, принимать сигнал управления оператора и определять скорректированный сигнал управления оператора, основанный на измерительном сигнале рабочего оборудования и сигнале управления оператора.
В другом аспекте раскрыт способ подгонки рабочего оборудования машины. Способ включает в себя этап предоставления измерительного сигнала рабочего оборудования, показывающего скорость рабочего оборудования машины, а также этап предоставления сигнала управления оператора, показывающего желаемое оператором перемещение рабочего оборудования машины. Способ также включает в себя этап определения скорректированного сигнала управления оператора, основанного на измерительном сигнале рабочего оборудования и сигнале управления оператора, и этап управления изменением скорости рабочего оборудования машины, основанного на скорректированном сигнале управления оператора.
В другом аспекте землеройно-транспортная машина включает в себя землеройный нож и измерительный датчик, установленный на землеройном ноже и настроенный так, чтобы предоставлять измерительный сигнал рабочего оборудования, показывающий скорость землеройного ножа. Землеройно-транспортная машина также включает в себя контроллер, настроенный так, чтобы принимать измерительный сигнал рабочего оборудования, принимать сигнал управления оператора, указывающий желаемое оператором перемещение землеройного ножа, и определять скорректированный сигнал управления оператора, основанный на измерительном сигнале рабочего оборудования и сигнале управления оператора.
Краткое описание чертежей
На фиг.1 показано схематическое изображение машины в соответствии с описанием.
На фиг.2 показана примерная схема системы, предназначенной для получения скорректированного сигнала управления оператора.
На фиг.3A-3D показаны примерные графики поведения системы в соответствии с вариантом осуществления изобретения.
На фиг.4 показана блок-схема последовательности операций способа в соответствии с описанием.
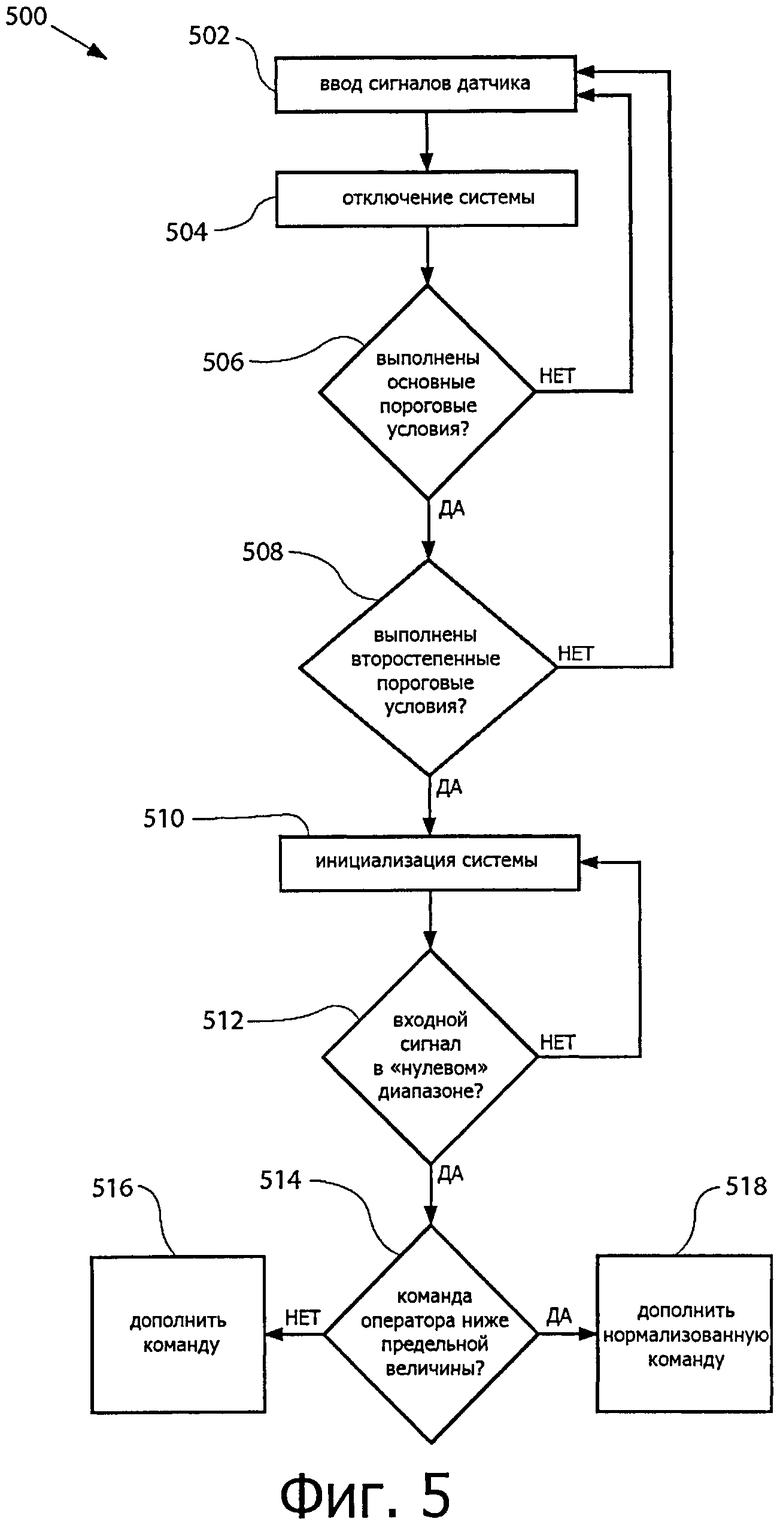
На фиг.5 показана блок-схема последовательности операций способа в соответствии с описанием.
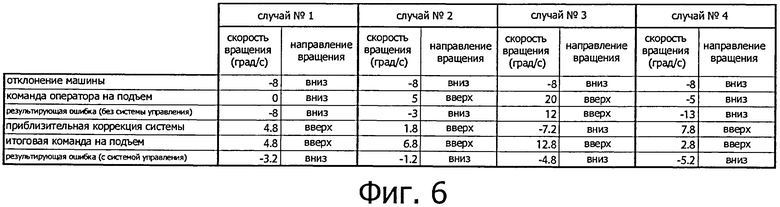
На фиг.6 показана таблица примерного поведения системы в соответствии с описанием.
Осуществление изобретения
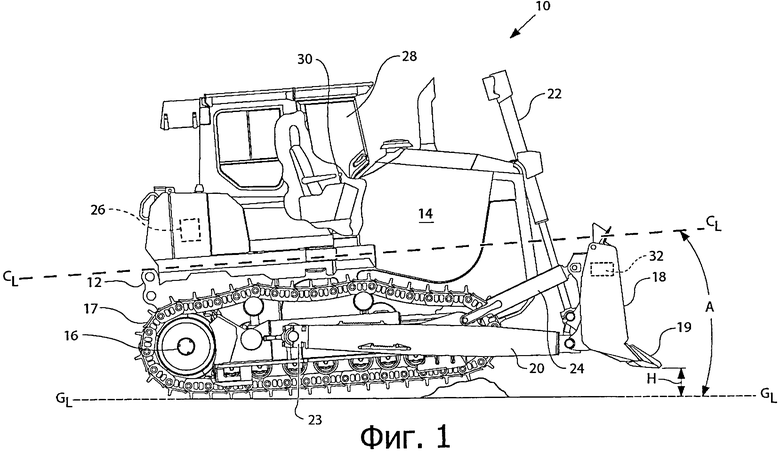
На фиг.1 показано схематическое изображение машины в соответствии с вариантом осуществления изобретения. Трактор 10 включает в себя раму 12 и мотор 10. Ведущее колесо 16 приводит в движение гусеницу 17 для перемещения трактора 10. Хотя показан трактор 10 гусеничного типа, могут также использоваться и другие, например колесные, конфигурации. В дополнение, системы и способы из этого документа могут использоваться с любыми двигателями и приводными механизмами, используемыми в технике. Это примечательно, поскольку в технике имеется увеличивающееся число двигателей и приводных систем. Дополнительно, системы и способы, раскрытые в этом документе, также могут использоваться на машинах, отличных от трактора, имеющего землеройный нож, таких как погрузчик или грейдер.
У трактора 10 имеется нож 18, присоединенный к раме 12 с помощью шарниров посредством толкающих брусьев 20 с каждой стороны трактора 10 (показана только одна боковая сторона). Гидравлические цилиндры 22, присоединенные к раме 12, поддерживают нож 18 в вертикальном направлении и позволяют ножу 18 подниматься или опускаться с точки зрения фиг.1. Гидравлические цилиндры 24 с каждой стороны трактора 10 позволяют изменять угол наклона кромки 19 ножа относительно центральной линии машины ("CL" на фиг.1).
Предпочтительно, чтобы гидравлические цилиндры 22, 24 имели электрогидравлическое управление, получая сигналы от управляющего модуля 26. Управляющий модуль 26 генерирует сигнал, который переводится в направление и величину перемещения соответствующих гидравлических цилиндров 22, 24. Как показано на фиг.1, перемещение гидравлических цилиндров 22, 24 приводит к вращению ножа 18. Таким образом, направление и величина перемещения ножа 18 зависят от одного или более сигналов, сгенерированных управляющим модулем 26.
Управляющий модуль 26 может устанавливаться в любое удобное место на тракторе 10. В тракторе 10 может иметься более одного управляющего модуля 26 для управления различными функциями и системами трактора 10.
Управляющий модуль 26 может включать по меньшей мере один из следующих компонентов: микропроцессор, запоминающее устройство (например, оперативное запоминающее устройство RAM, постоянное запоминающее устройство ROM), устройства хранения данных (например, оптический носитель, запоминающее устройство, жесткие диски), датчик входных контуров, схемы управления системой и выполняемое программное обеспечение. Эти компоненты выполняют функции управляющей системы, описанной в этом документе, и/или выполняют задачи, относящиеся к другим системам трактора 10. Специалист в этой области техники может выбрать подходящую комбинацию аппаратных и/или программных компонентов, предназначенных для машины.
У трактора 10 имеется кабина 28, из которой оператор управляет трактором 10. Кабина 28 содержит одно или более средств управления, с помощью которых оператор отдает команды. На фиг.1 показан джойстик 30, с помощью которого оператор может управлять одним или более рабочим оборудованием машины, таким как нож 18. Джойстик 30 может быть настроен так, чтобы автоматически возвращаться в "нейтральное" положение, если оператор не двигает джойстик 30 в каком-либо направлении. Оператор может перемещать джойстик 30 вверх, чтобы дать команду повернуть нож 18 вертикально от земли или перемещать джойстик 30, чтобы дать команду повернуть нож 18 вертикально к земле.
Джойстик 30 также может быть настроен таким образом, чтобы управлять другими аспектами ножа 18, как, например, угловой скоростью ножа (например, приводя в действие гидравлические цилиндры 24). Предпочтительно, чтобы джойстик 30 функционировал как часть электрогидравлической системы трактора 10, при этом совершаемые оператором перемещения джойстика 30 (включая величину перемещения джойстика 30) преобразуются в сигнал и отправляются на управляющий модуль 26. Таким образом, перемещение джойстика 30 генерирует сигнал, отправляемый управляющему модулю 26 и показывающий величину и направление перемещения джойстика 30, задаваемого оператором. Управляющий модуль 26 может обрабатывать этот сигнал и потенциально корректировать сигнал до того, как он будет передан гидравлическим цилиндрам 22, 24 для корректировки положения ножа 18. Это дополнительно описано ниже.
Трактор 10 оборудован измерительным датчиком 32. Предпочтительно, чтобы измерительный датчик 32 был смонтирован на ноже 18, но также может быть смонтирован на толкающих брусьях 20 или раме 12. Измерительный датчик 32 предоставляет данные, которые показывают (прямо или косвенно) скорость рабочего оборудования, такого как нож 18. Измерительный датчик 32 может являться датчиком скорости наклона (например, гироскопом), предназначенным для измерения скорости изменения положения ножа 18 во время его поворота вокруг оси, задаваемой шарнирным соединением 23 ножа 18 и рамы 12 (например, шарнирным соединением толкающих брусьев 29 и рамы 12). Высота ножа 18 относительно центральной линии машины (показана на фиг.1 как "CL") пропорциональна углу поворота ножа 18 вокруг шарнирного соединения 23. Таким образом, когда оператор дает команду на поднятие или опускание ножа 18 (например, путем приведения в действие гидравлических цилиндров 22), измерительный датчик 32 может зарегистрировать угол поворота, пропорциональный величине перемещения ножа 18.
Аналогично, когда трактор 10 поднимается или опускается, например во время перемещения по неровной поверхности, нож 18 также поднимается или опускается. Таким образом, измерительный датчик 32 может зарегистрировать угол поворота пропорциональный величине перемещения (вращения вокруг оси крепления) ножа 18.
В качестве альтернативы, измерительный датчик 32 может являться акселерометром. В этой конфигурации предпочтительно, чтобы акселерометр был прикреплен к ножу 18 или толкающим брусьям 20. В этом варианте осуществления акселерометр может предоставлять сигнал, показывающий ускорение и/или скорость ножа 18.
Трактор 10 может быть оснащен переключателем (не показан), предназначенным для включения или выключения электронной системы управления, использующей измерительный датчик 32. При выключенной системе управления трактор 10 будет игнорировать сигналы, генерируемые измерительным датчиком 32. В этом случае нож 18 будет перемещаться в соответствии с командами оператора, а корректировка положения с учетом колебаний трактора 10 вводиться не будет.
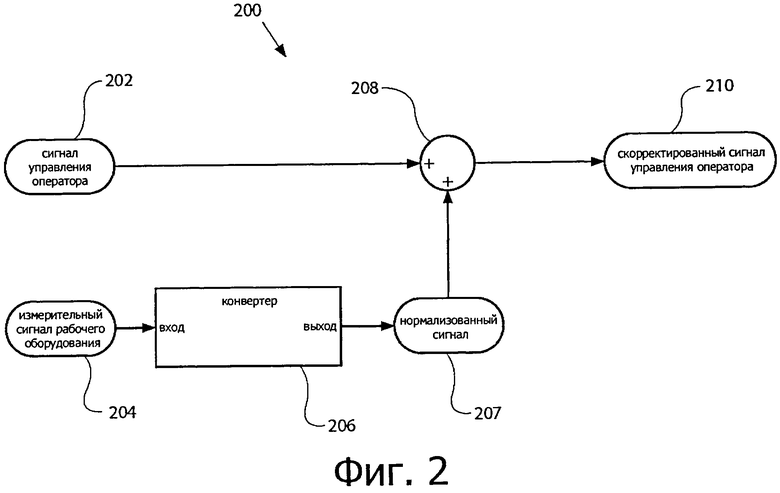
На фиг.2 показана схема системы управления 200 в соответствии с вариантом осуществления изобретения, если система управления включена. Сигнал 202 - это "сигнал управления оператора", используемый здесь для обозначения сигнала, показывающего перемещение рабочего оборудования (если таковое есть), задаваемое оператором. Например, обращаясь к фиг.1, если оператор отдает команду поднять нож 18, то сигнал 202 представляет собой сигнал, полученный от перемещения джойстика 30. Этот сигнал может показывать и направление (например, что оператор хочет поднять или опустить нож) и величину скорости изменения. Сигнал 202, предпочтительно, является нормализованной командой, которая показывает процент полного возможного диапазона смещения джойстика 30.
Сигнал 204 - это "измерительный сигнал рабочего оборудования", используемый здесь для обозначения сигнала, отображающего команду на поворот ножа 18 на величину, необходимую для нейтрализации движения ножа 18, зарегистрированного измерительным датчиком 32. Например, если трактор 10 поднимается, то измерительный датчик 32 может показать, что нож 18 движется вверх. Управляющий модуль 26 вычислит сигнал, который необходимо отправить гидравлическим цилиндрам 22, 24, чтобы нейтрализовать движение ножа 18, отображаемое сигналом 204. Сигнал 204 может быть преобразован в "нормированный" сигнал в конвертере 206 для получения сигнала 207. Другими словами, если сигнал 206 представляет собой команду скорости рабочего оборудования в градусах в секунду, этот сигнал может быть преобразован так, чтобы отображать эквивалентную процентную команду джойстика оператора. Сигнал 207, таким образом, отображает сигнал, вычисленный контроллером и представленный в терминах гипотетического перемещения джойстика оператора, которое понадобилось бы для нейтрализации перемещения ножа 18.
Управляющий модуль 26 сравнивает сигнал 202 и сигнал 207 и порождает скорректированный сигнал 210 управления оператора, основанный, по меньшей мере, частично на сигнале 202 и/или сигнале 207. Процесс комбинирования сигналов 202 и 207 показан в виде комбинационного круга 208. Методология сравнения и комбинирования сигналов 202 и 207 для получения скорректированного сигнала 210 управления оператора подробно описана ниже, специально применительно к фиг.5. Скорректированный сигнал 210 управления оператора представляет собой сигнал, отправленный одному или более гидравлическому цилиндру, в результате чего нож 18 может подняться или опуститься, что позволяет полностью или частично смягчить движение ножа 18 относительно земли.
Необходимо отметить, что способ комбинирования, показанный на фиг.2, является не единственным способом комбинирования измерительного сигнала рабочего оборудования и сигнала управления оператора. Например, измерительный сигнал рабочего оборудования не требуется конвертировать в эквивалентную гипотетическую команду оператора перед сравнением с сигналом управления оператора.
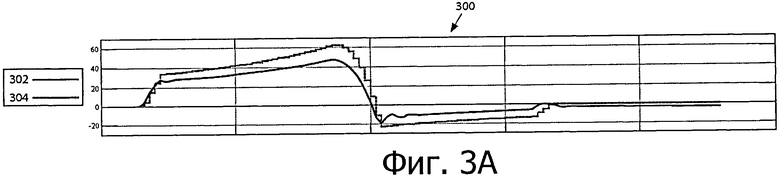
На фиг.3 показаны примерные графики поведения системы 300 в соответствии с описанием. На фиг.3а показан график зависимости высоты кромки ножа (относительно центральной линии тестовой машины) от времени в процессе движения машины через бугор примерно треугольной формы (например, схожий с тем, который показан на фиг.1). Линия 304 показывает высоту кромки ножа при движении машины через бугор без использования системы управления рабочим оборудованием. Линия 302 показывает высоту кромки ножа при движении тестовой машины через бугор, но при этом машина использует систему управления рабочим оборудованием, описанную в этом документе. Как видно, при использовании машиной системы управления рабочим оборудованием, согласно приведенному здесь описанию, полная величина изменения высоты кромки ножа меньше, при этом система может вернуться в стабильное состояние в течение меньшего промежутка времени, чем при отсутствии системы управления.
На фиг.3b показана зависимость вылета (в мм) гидравлического цилиндра, управляющего ножом, от времени. График на фиг.3b приведен для того же теста, что и тест, показанный линией 302 на фиг.3а. На фиг.3 с показана скорость того же цилиндра (в мм/сек) для того же теста, а на фиг.3d показан угол наклона (в радианах) для того же теста. Как показано на фиг.3b, система управления, согласно настоящему описанию, может не вернуть нож точно в предыдущее положение, которое было до попадания на неровную местность, потому что система не имеет целевого положения. На фиг.3b длина цилиндра отклоняется от предыдущего положения, которое было до неровной местности, на 1 мм. Аналогично, на фиг.3а линия 302 возвращается не точно к "0". Может иметь место небольшое отклонение, связанное с системой. Тем не менее, так как система уменьшает полную амплитуду движения ножа в процессе перемещения машины по неровной местности, конечным итогом применения системы управления может быть более гладкий, более желательный результат.
Промышленная применимость
В настоящем документе раскрываются полезные системы и способы для управления рабочим оборудованием на машине, таким как нож на тракторе или ковш на погрузчике. Рабочим оборудованием машины можно управлять так, чтобы движение рабочего оборудования было более плавным и чтобы управление оставалось интуитивно понятным оператору, при этом не нужно использовать более дорогие системы управления, для которых требуется наличие заранее заданных сведений об условиях на строительной площадке.
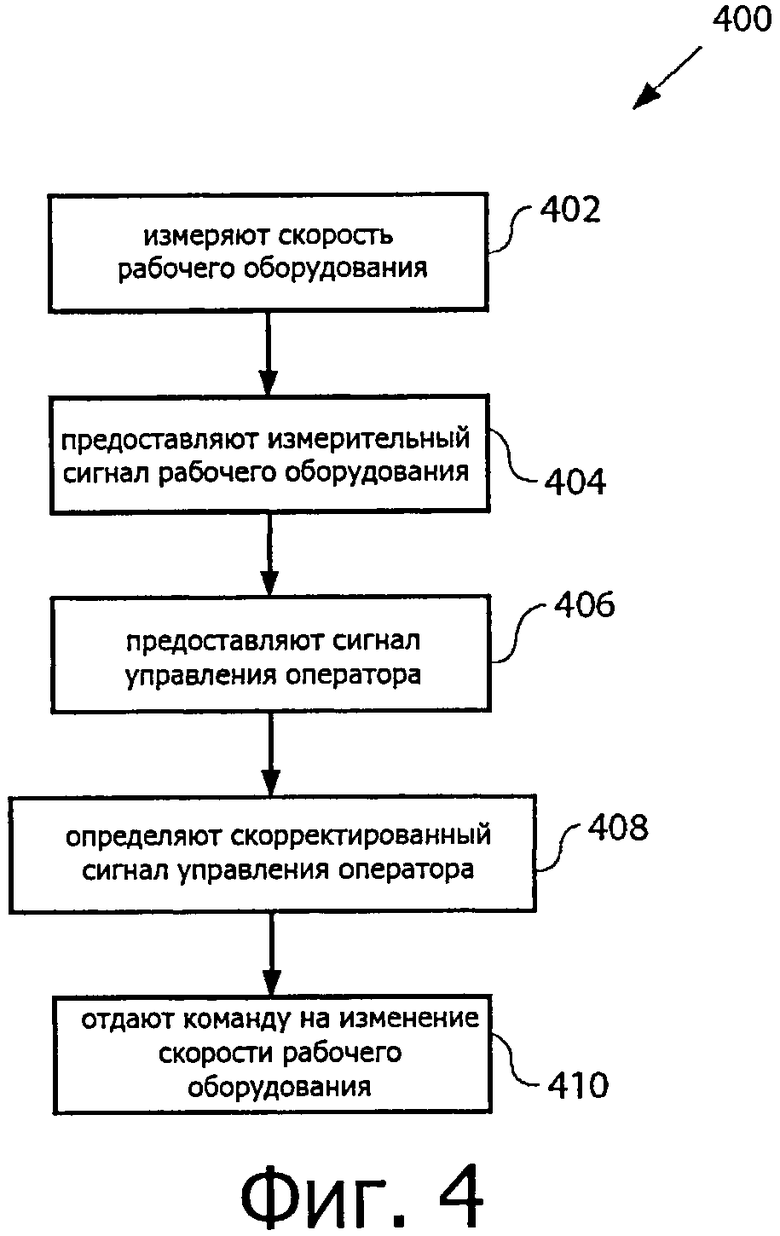
На фиг.4 показана блок-схема последовательности операций способа 400 в соответствии с описанием. В качестве примера будет использоваться фиг.1, однако способ не ограничен точной конфигурацией, показанной на фиг.1. На первом шаге, шаге 402, измерительный датчик (например, измерительный датчик 32) измеряет скорость рабочего оборудования (например, ножа 18). Измерительный датчик передает сигнал электронному управляющему модулю, установленному в машине - шаг 404. Этот сигнал может показывать скорость изменения положения рабочего оборудования. Может потребоваться дополнительная обработка сигнала электронным управляющим модулем, чтобы выявить перемещение рабочего оборудования.
На шаге 406 управляющий модуль, установленный в машине, предоставляет сигнал управления оператора. В некоторых вариантах осуществления сигнал управления оператора может генерироваться, даже если оператор не отдавал команду рабочему оборудованию совершать какое-либо перемещение (например, джойстик находится в нейтральном положении). Это может быть полезным, чтобы удостоверить электронный управляющий модуль о том, что в текущий момент команды оператором не отдавались.
На шаге 408 измерительный сигнал рабочего оборудования, полученный на шаге 404, и сигнал управления оператора, полученный на шаге 406, сравниваются и, возможно, комбинируются для формирования нового сигнала, "скорректированного сигнала управления оператора", который управляет желаемым перемещением рабочего оборудования. На шаге 410 корректируется скорость рабочего оборудования машины, при этом, предпочтительно, сигнал 408 приводит в действие электрогидравлическую систему управления для корректировки скорости рабочего оборудования машины. Скорость рабочего оборудования может корректироваться для того, чтобы компенсировать всю скорость ножа, или, как альтернатива, скорость рабочего оборудования может корректироваться для того, чтобы установить в значительной степени постоянный темп изменения скорости рабочего оборудования машины для таких применений, как, например, грейдерование. При рассмотрении способа 400 на фиг.4 шаги способа 400 не обязательно должны выполняться точно в таком порядке, как показано. Например, шаг 406 может выполняться перед шагом 404. Шаги 404 и 406 могут также выполняться одновременно.
На фиг.5 показана блок-схема последовательности операций способа 500 управления рабочим оборудованием в соответствии с описанием. Приведенные шаги описывают полную активизацию системы, а именно, начиная с момента включения машины. Специалист в области техники поймет, что некоторые шаги являются необязательными, в зависимости от специфической конфигурации машины, и требуют специального оператора.
На первом шаге, шаге 502, измерительный сигнал рабочего оборудования подается на вход контроллеру на машине, имеющей систему управления. На шаге 504 система управления рабочим оборудованием отключена. Это может являться исходным условием при включении машины до тех пор, пока до активизации системы управления рабочим оборудованием контроллер не определит, что выполнено одно или более пороговых условий. В этой ситуации контроллер может получать измерительный сигнал рабочего оборудования, но игнорировать этот сигнал до тех пор, пока не будут выполнены пороговые условия активизации.
На шаге 506 контроллер определяет, выполнены ли основные пороговые условия, для того чтобы активизировать систему управления. Например, в машине может иметься переключатель оператора, показывающий, желает ли оператор машины активизировать систему управления рабочим оборудованием. Таким образом, одно из пороговых условий может заключаться в том, что переключатель находится в положении "ВКЛ", либо оператором задан другой подобный индикатор, указывающий на включение системы управления. В дополнение, машина должна быть оборудована переключателем блокировки рабочего оборудования или иным устройством, разработанным для предотвращения движения рабочего оборудования. Пороговым условием до момента включения системы управления может являться тот факт, что блокировка рабочего оборудования снята.
Другим основным пороговым условием может являться то, что трансмиссия машины находится в конкретном состоянии (например, не в нейтральном положении). Еще одним примером порогового условия может быть то, что путевая скорость машины выше порогового значения (например, больше нуля), или что число оборотов двигателя находится в определенном диапазоне. Еще одним пороговым условием может являться то, что одна или более других систем управления не активны и управляют рабочим оборудованием. Условие такого типа желательно, если машина оборудована различными видами рабочего оборудования, которое является взаимоисключающим и не может функционировать совместно.
Если на шаге 506 основные пороговые условия не выполнены, то система управления рабочим оборудованием не активизируется, а система машины возвращается к более раннему шагу (например, шагу 502) до тех пор, пока основные пороговые условия не будут выполнены.
Если на шаге 506 выполнены основные пороговые условия, то перед активацией системы управления рабочим оборудованием контроллер может приступить к проверке, выполнены ли второстепенные пороговые условия, шаг 508. Например, контроллер может проверить, не превышает ли путевая скорость машины максимально допустимой скорости для системы управления рабочим оборудованием. Контроллер может также определить, что угол поворота рулевого механизма не превышает максимального, чтобы отключить систему управления рабочим оборудованием во время больших поворотов. Контроллер также может проверить, находится ли рабочее оборудование в свободной конфигурации.
Контроллер также может проверить, не отдает ли оператор команду рабочему оборудованию совершить очень большое перемещение, превосходящее пороговое значение. Например, если оператор дает команду поднять рабочее оборудование на большую величину (например, оператор пытается поднять рабочее оборудование над препятствием), то контроллер может отключить систему управления рабочим оборудованием (или предотвратить включение системы управления) и не пытаться компенсировать перемещение рабочего оборудования, заданное оператором. Таким образом, второстепенное пороговое условие может заключаться в том, что команда оператора на перемещение рабочего оборудования не превышает пороговой величины.
Для шагов 506 и 508 контроллер также может в некоторых случаях определить, выполнены ли основные и/или второстепенные пороговые условия в течение предопределенного промежутка времени перед тем, как активизировать систему управления рабочим оборудованием. Например, контроллер может убедиться, что скорость машины выше пороговой скорости в течение предопределенного промежутка времени (например, 80 миллисекунд) перед тем, как решить, что пороговое условие выполнено. Предопределенный промежуток времени может применяться к одному, некоторым или всем пороговым условиям до активизации системы управления рабочим оборудованием. В дополнение, для различных пороговых условий контроллеру могут быть заданы различные предопределенные временные пороги. Например, контроллер может убедиться, что скорость машины выше пороговой скорости в течение, по меньшей мере, 80 миллисекунд и что угол поворота рулевого механизма не превышает максимального порогового значения в течение 2 секунд до активизации системы управления рабочим оборудованием.
Если выполнены основные и второстепенные пороговые условия, то производится инициализация системы управления рабочим оборудованием, шаг 510. Система начинает интерпретировать измерительный сигнал рабочего оборудования. Этот процесс может включать в себя применения низкочастотного фильтра для устранения шума датчика и/или высокочастотного фильтра для снижения устойчивых смещений, возникающих из-за колебаний температуры, несбалансированного шума и/или других обычных причин, известных специалистам в технике и приводящих к отклонению сигнала.
На следующем шаге 512 контролер проверяет, попадает ли входной сигнал датчика в "нулевой" диапазон в течение определенного промежутка времени. По сути, при этом проверяется, является ли величина перемещения ножа, замеренная измерительным датчиком, настолько малой, что принимается контроллером на нулевое значение. Контроллер может задать значение, ниже которого перемещение рабочего оборудования принимается равным нулю и при котором не генерируется сигнал автоматического управления рабочим оборудованием для компенсации этого минимального перемещения рабочего оборудования. Эта стратегия может помочь предотвратить нежелательное "смещение" рабочего оборудования, когда измерительный датчик регистрирует очень малое, но математически не нулевое движение рабочего оборудования. Если входной сигнал находится в пределах нулевого диапазона, то контроллер может попытаться еще раз совершить шаг 510 (и/или шаги 506 и 508).
Если измерительный сигнал рабочего оборудования не находится в пределах "нулевого" диапазона (например, имеет достаточно большую величину), то контроллер может сравнить измерительный сигнал рабочего оборудования с величиной и направлением сигнала управления оператора (если таковой имеется).
В процессе сравнения, как показано на фиг.6, может реализоваться множество различных сценариев.
Один из возможных сценариев. Случай №1 на фиг.6, заключается в том, что когда машина поднимается на бугор, оператор не отдает вовсе никаких команд рабочему оборудованию. Например, если во время движения машины по неровной поверхности рабочее оборудование машины (например, землеройный нож) опускается вниз со скоростью 8 градусов в секунду, оператор не должен отдавать команды рабочему оборудованию. В этом случае при отсутствии какой-либо системы управления для корректирования движения ножа результирующая ошибка (разница между фактическим движением ножа и движением ножа, необходимым для поддержания постоянного уровня) составит 8 градусов в секунду. Однако если бы использовалась система управления, то измерительный датчик определил бы, что нож движется вниз со скоростью 8 градусов в секунду, и вычислил бы поправку к скорости ножа. На фиг.6 система управления вычисляет скорректированный сигнал управления оператора для того, чтобы поднять нож вверх со скоростью 4,8 градусов секунду, что приводит к ошибке в 3,2 градуса в секунду. В некоторых обстоятельствах может быть желательным скорректировать только часть измеренной ошибки, чтобы сделать общее движение ножа более плавным. Однако в качестве альтернативы система управления может быть настроена так, чтобы выдавать скорректированный сигнал управления оператора, который пытается полностью скомпенсировать измеренную ошибку. В любом случае использование системы управления в Случае №1 на фиг.6 уменьшает общую ошибку движения ножа.
Другой возможный сценарий, показанный на фиг.6 как Случай №2, заключается в том, что во время движения машины по неровной поверхности оператор пытается скорректировать движение ножа, чтобы компенсировать влияние неровной поверхности на движение ножа. Однако оператор дает команду не достаточную для полной компенсации движения ножа. В этом примере оператор отдает команду, достаточную для того, чтобы перемещать нож вверх со скоростью 5 градусов в секунду. В результате чистое движение ножа все еще составляет значение 3 градуса в секунду вниз (это значение, которое определяет измерительный датчик, если измерительный датчик установлен на ноже). Следовательно, система управления выдает управляющую команду рабочему оборудованию перемещаться вверх со скоростью 6,8 градусов в секунду, что представляет собой команду оператора на перемещение вверх со скоростью 5 градусов в секунду плюс приращение системы управления, равное 1,8 градусов в секунду вверх. До некоторой степени контроллер "корректирует" команду оператора путем добавления приращения к команде для того, чтобы получить более плавное движение ножа.
Случай 1 №3 на фиг.6 отображает другой возможный сценарий во время перемещения машины по неровной поверхности. Оператор может почувствовать неровность поверхности и скорректировать нож в правильном направлении, но отдать команду на большее перемещение, чем необходимо для компенсации неровности поверхности (например, "избыточная коррекция"). Например, если из-за неровности поверхности возникает скачок, способный переместить нож вниз со скоростью 8 градусов в секунду, то оператор может отдать команду поднять нож вверх со скоростью 20 градусов в секунду. При отсутствии системы управления комбинация этих двух сил приведет к чистому движению ножа вверх относительно земли со скоростью 12 градусов в секунду. Однако при использовании системы управления измерительный датчик на рабочем оборудовании определит «чистое» движение со скоростью 12 градусов в секунду и скорректирует по меньшей мере часть этого движения. В показанном примере система управления вносит поправку путем уменьшения команды на подъем, передаваемой рабочему оборудованию, что приводит к уменьшению общей ошибки.
Другой возможный сценарий показан на фиг.6 как Случай №4. Во время перемещения машины по неровной поверхности нож может двигаться, в то время как оператор может дать команду, которая усугубит скачкообразное движение ножа. В этом случае система управления "противодействует" оператору путем отдачи команды на перемещение в противоположном направлении в попытке замедлить движение ножа относительно земли.
Специалист в области техники может понять, что числа, приведенные на фиг.6, являются только примерными и используются для дополнительного описания системы управления, описанной в этом документе, и что фактическая сфера системы управления не ограничивается этими примерными числами, используемыми для целей демонстрации идеи изобретения.
Возвращаясь к фиг.5, для вариантов осуществления настоящего изобретения, приведенных в этом документе, не требуется точное следование шагам, показанным на фиг.5. Например, шаги 506 и 508 могут быть скомбинированы в один шаг и могут иметь дополнительные опции или условия, по мере надобности для различных машин и различных конфигураций рабочего оборудования машины. В дополнение, контроллер может быть настроен так, чтобы перепроверять пороговые условия через равные или случайные промежутки времени, в то время как система управления рабочим оборудованием активна, чтобы определить, нужно ли отключить систему управления рабочим оборудованием.
Другие варианты осуществления, признаки, аспекты и принципы раскрытых примеров будут очевидны специалистам в области техники и могут быть выполнены в различных условиях эксплуатации и системах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| УПРАВЛЕНИЕ ПРИСПОСОБЛЕНИЕМ ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ВДОЛЬ ПУТИ ИЛИ ТРАЕКТОРИИ | 2016 |
|
RU2705436C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КАЛИБРОВКИ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОМЫШЛЕННОГО ТРАКТОРА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2024 |
|
RU2827913C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ | 2012 |
|
RU2574047C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ НЕЗАВИСИМЫМ ДОЗИРУЮЩИМ КЛАПАНОМ, РАБОЧАЯ МАШИНА | 2006 |
|
RU2426016C2 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВАМИ ДЛЯ ЕЕ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2569711C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЛЕСОТЕХНИЧЕСКОЙ МАШИНОЙ | 2010 |
|
RU2628587C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
| ТРАКТОР С РЕГИСТРАТОРОМ ПАРАМЕТРОВ | 2014 |
|
RU2542571C1 |



Изобретение относится к средствам управления рабочим оборудованием машины. Предложенная система управления включает в себя измерительный датчик, выполненный с возможностью предоставлять измерительный сигнал рабочего оборудования, показывающий скорость рабочего оборудования машины в результате наклона машины, и контроллер. При этом контроллер выполнен с возможностью принимать измерительный сигнал рабочего оборудования, принимать сигнал управления оператора и определять скорректированный сигнал управления оператора на основе измерительного сигнала рабочего оборудования и сигнала управления оператора. Причем скорректированный сигнал управления оператора частично компенсирует недочет указанного сигнала управления оператора. Предложены также способ корректировки рабочего оборудования и машины для перемещения грунта. Техническим результатом является обеспечение корректировки скорости перемещения рабочего оборудования в условиях неровной поверхности и получение более гладкой поверхности без необходимости знания или вычисления фактического целевого положения рабочего оборудования. 4 н. и 17 з.п. ф-лы, 9 ил.
1. Система управления для машины, содержащая:
датчик, выполненный с возможностью предоставлять измерительный сигнал рабочего оборудования, показывающий скорость рабочего оборудования машины в результате наклона машины; и
контроллер, выполненный с возможностью:
принимать измерительный сигнал рабочего оборудования,
принимать сигнал управления оператора, и
определять скорректированный сигнал управления оператора на основе измерительного сигнала рабочего оборудования и сигнала управления оператора, при этом скорректированный сигнал управления оператора частично компенсирует недочет указанного сигнала управления оператора.
2. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью устанавливать по существу постоянный темп изменения скорости рабочего оборудования машины.
3. Система по п. 1, в которой датчик представляет собой акселерометр или гироскоп.
4. Система по п. 3, в которой датчик установлен на рабочем оборудовании машины.
5. Система по п. 4, в которой рабочее оборудование машины представляет собой землеройный нож машины для перемещения грунта.
6. Система по п. 3, в которой измерительный сигнал рабочего оборудования отмеряет угловую скорость рабочего оборудования машины относительно точки присоединения рабочего оборудования к машине.
7. Система по п. 1, в которой скорректированный сигнал управления оператора перемещает рабочее оборудование машины в том же направлении, которое задает сигнал управления оператора.
8. Система по п. 1, в которой скорректированный сигнал управления оператора перемещает рабочее оборудование машины, когда оператор не отдает команду на перемещение рабочего оборудования машины.
9. Система по п. 1, в которой скорректированный сигнал управления оператора перемещает рабочее оборудование машины в направлении, противоположном направлению, которое задает сигнал управления оператора.
10. Способ корректировки рабочего оборудования машины, характеризующийся тем, что:
предоставляют измерительный сигнал рабочего оборудования, показывающий скорость рабочего оборудования машины в результате наклона машины;
предоставляют сигнал управления оператора, показывающий желаемое оператором перемещение рабочего оборудования машины для нейтрализации перемещения, вызванного указанным наклоном машины;
определяют в контроллере скорректированный сигнал управления оператора на основе измерительного сигнала рабочего оборудования и сигнала управления оператора, который лишь частично компенсирует недочет указанного сигнала управления оператора; и
отдают команду на изменение скорости рабочего оборудования машины на основе скорректированного сигнала управления оператора.
11. Способ по п. 10, в котором на этапе предоставления измерительного сигнала рабочего оборудования измеряют ускорение рабочего оборудования машины.
12. Способ по. 11, содержащий этап, на котором устанавливают по существу постоянный темп изменения скорости рабочего оборудования машины.
13. Способ по п. 10, содержащий этап, на котором приводят в действие гидравлический цилиндр для изменения скорости вращения рабочего оборудования машины.
14. Способ по п. 10, в котором на этапе определения скорректированного сигнала управления оператора уменьшают задаваемое оператором изменение скорости рабочего оборудования машины.
15. Способ по п. 10, в котором на этапе определения скорректированного сигнала управления оператора увеличивают задаваемое оператором изменение скорости рабочего оборудования машины.
16. Способ по п. 10, в котором на этапе определения скорректированного сигнала управления оператора устанавливают скомпенсированный сигнал управления оператора равным сигналу управления оператора, если сигнал управления оператора превосходит пороговую величину.
17. Способ по п. 10, в котором на этапе определения скорректированного сигнала управления оператора устанавливают скомпенсированный сигнал управления оператора равным нулю, если сигнал управления оператора ниже пороговой величины.
18. Машина для перемещения грунта, содержащая: землеройный нож;
измерительный датчик, установленный на землеройном ноже и выполненный с возможностью предоставлять измерительный сигнал рабочего оборудования, показывающий скорость землеройного ножа, и
контроллер, выполненный с возможностью:
принимать измерительный сигнал рабочего оборудования,
принимать сигнал управления оператора, показывающий желаемое оператором перемещение землеройного ножа, и
определять скорректированный сигнал управления оператора на основе измерительного сигнала рабочего оборудования и сигнала управления оператора.
19. Машина для перемещения грунта, содержащая:
землеройный нож;
измерительный датчик, установленный на землеройном ноже и выполненный с возможностью предоставлять измерительный сигнал рабочего оборудования, показывающий скорость землеройного ножа в результате перемещения землеройного ножа, которое вызвано непреднамеренным наклоном машины; и
контроллер, выполненный с возможностью:
принимать измерительный сигнал рабочего оборудования,
принимать сигнал управления оператора, показывающий желаемое оператором перемещение землеройного ножа, при этом указанный сигнал управления оператора нейтрализует указанное перемещение землеройного ножа; и
определять скорректированный сигнал управления оператора на основе измерительного сигнала рабочего оборудования и сигнала управления оператора, причем скорректированный сигнал управления оператора частично нейтрализует недочет указанного сигнала управления оператора для полной нейтрализации указанного перемещения землеройного ножа.
20. Машина по п. 19, в которой скорректированный сигнал управления оператора представляет собой сигнал, обеспечивающий перемещение землеройного ножа в направлении, противоположном направлению, в котором землеройный нож перемещается в результате указанного непреднамеренного наклона машины.
21. Машина по п. 19, в которой скорректированный сигнал управления оператора представляет собой сигнал, обеспечивающий перемещение землеройного ножа по существу с постоянной скоростью.
| US 5875701 A, 02.03.1999 | |||
| DE 19726822 A1, 02.01.1998 | |||
| Способ испытания бульдозера | 1987 |
|
SU1715998A1 |
| US 20060070746 A1, 06.04.2006 | |||
| Устройство стабилизации угла наклона рабочего органа землеройно-планировочной машины | 1987 |
|
SU1520199A1 |
| Способ укладки обмотки в пазы железа электрических машин | 1927 |
|
SU10520A1 |
| US 5493798 A, 27.02.1996 | |||
| US 6609315 B1, 26.08.2003 | |||

