Устройство относится к электротехнике, а именно к электрическим машинам и измерительной технике и может быть использовано для цифрового управления синхронным электродвигателем с постоянными магнитами.
Известно устройство для определения углового положения ротора вентильного электродвигателя [SU 1295484 A1, H02K 29/06, опубл. 29.07.1985], содержащее установленный на валу двигателя обтюратор с кольцевыми дорожками, состоящими из сигнальных секторов, блок оптических преобразований, снабженный оптическими парами, установленными против соответствующих дорожек обтюратора, и блок электрических преобразований, подключенный входами к выходам блока оптических преобразований. Блок электрических преобразований снабжен двумя счетчиками и умножителем частоты. Выход первой оптической пары связан с установочным входом первого счетчика. Выход второй оптической пары соединен со счетным входом первого счетчика, входом умножителя частоты и установочным входом второго счетчика, счетный вход которого связан с выходом умножителя частоты.
Однако реализация данного устройства сопряжена с необходимостью установки дополнительного вычислительного модуля для определения частоты вращения ротора по полученным оценкам его положения.
Техническим результатом является создание устройства получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами.
Технический результат достигается тем, что предложенное устройство для получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, содержит три датчика фазных напряжений и три датчика фазных токов, входы которых подключены к фазам питания синхронного электродвигателя с постоянными магнитами, а выходы подключены к преобразователю координат, выходы которого подключены к первому, второму, третьему и четвертому блокам временной задержки, первому и второму блокам определения величины прогноза оценки тока, к блоку определения прогноза оценки момента сопротивления на валу электродвигателя и к блоку определения оценки момента сопротивления на валу электродвигателя. Первый и второй блоки временной задержки подключены к первому блоку определения величины прогноза оценки тока. Третий блок временной задержки подключен ко второму блоку определения величины прогноза оценки тока. Четвертый блок временной задержки подключен ко второму блоку определения величины прогноза оценки тока, к блоку определения величины прогноза оценки момента сопротивления на валу электродвигателя и к блоку определения оценки момента сопротивления на валу электродвигателя. Первый блок определения величины прогноза оценки тока соединен с первым блоком определения величины коррекции оценки тока, который соединен с вторым блоком определения величины прогноза оценки тока, пятым блоком временной задержки и с первым блоком определения величины прогноза оценки тока. Пятый блок временной задержки подключен к первому блоку определения величины прогноза оценки тока, к второму блоку определения величины прогноза оценки тока и к первому блоку определения величины коррекции оценки тока. Второй блок определения величины прогноза оценки тока соединен со вторым блоком определения величины коррекции оценки тока, который соединен с первым блоком определения величины прогноза оценки тока, со вторым блоком определения величины прогноза оценки тока, с шестым блоком временной задержки, с блоком определения величины прогноза оценки момента сопротивления, с блоком оценки момента сопротивления на валу электродвигателя и с блоком определения величины оценки электромагнитного момента. Шестой блок временной задержки соединен с первым и вторым блоками определения величины прогноза оценки тока, со вторым блоком определения величины коррекции оценки тока, с блоком определения величины прогноза оценки момента сопротивления на валу электродвигателя, с блоком определения оценки момента сопротивления на валу электродвигателя и с блоком определения величины оценки электромагнитного момента. Блок определения прогноза оценки момента сопротивления на валу электродвигателя подключен к блоку коррекции оценки момента сопротивления, который подключен к седьмому блоку временной задержки и к блоку оценки момента сопротивления на валу электродвигателя. Седьмой блок временной задержки подключен к блоку коррекции оценки момента сопротивления. Блок определения оценки момента сопротивления на валу электродвигателя подключен к блоку прогноза оценки частоты вращения ротора, к блоку вывода информации и к восьмому блоку временной задержки, который соединен с блоком прогноза оценки частоты вращения ротора, который подключен к блоку коррекции оценки частоты вращения ротора. Блок определения величины оценки электромагнитного момента подключен к блоку прогноза оценки частоты вращения ротора и к девятому блоку временной задержки, который подключен к блоку прогноза оценки частоты вращения ротора. Блок коррекции оценки частоты вращения ротора подключен к первому и второму блокам определения величины прогноза оценки тока, к десятому блоку временной задержки и к блоку вывода информации. Десятый блок временной задержки соединен с первым и вторым блоками определения величины прогноза оценки тока и с блоком коррекции оценки частоты вращения ротора.
Таким образом, предложенное устройство позволяет реализовать управление синхронным электродвигателем с постоянными магнитами в цифровом виде, что отличается меньшей ресурсоемкостью вычислений и позволяет расширить функциональные возможности электропривода для применения в сложных технологических процессах.
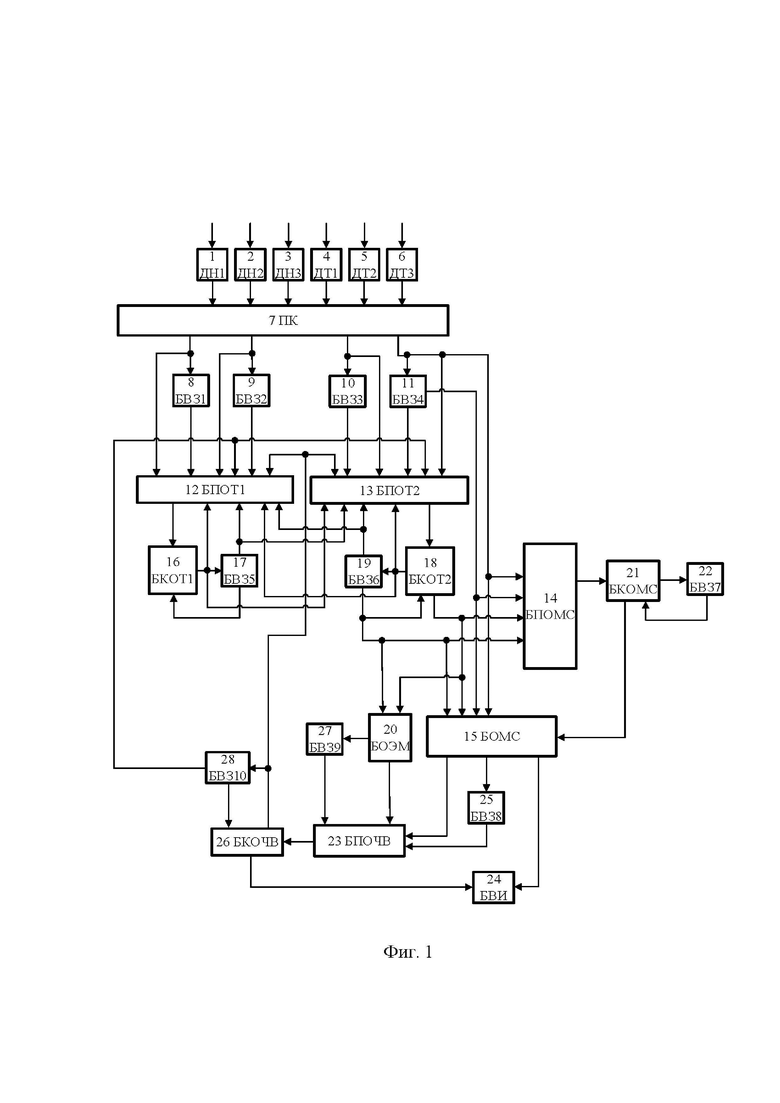
На фиг. 1 изображена схема устройства получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами.
Устройство получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами содержит три датчика фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и три датчика фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3), которые подключены к фазам питания синхронного электродвигателя с постоянными магнитами (не показано на фиг. 1). К выходам датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и датчиков фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) подключен преобразователь координат 7 (ПК). Выходы преобразователя координат 7 (ПК) подключены к первому 8 (БВЗ1), второму 9 (БВЗ2), третьему 10 (БВЗ3), четвертому 11 (БВЗ4) блокам временной задержки, первому 12 (БПОТ1) и второму 13 (БПОТ2) блокам определения величины прогноза оценки тока, блоку определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), блоку определения оценки момента сопротивления на валу электродвигателя 15 (БОМС).
Первый блок временной задержки 8 (БВЗ1) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1). Второй блок временной задержки 9 (БВЗ2) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1). Третий блок временной задержки 10 (БВЗ3) подключен ко второму блоку определения величины прогноза оценки тока 13 (БПОТ2). Четвертый блок временной задержки 11 (БВЗ4) подключен ко второму блоку определения величины прогноза оценки тока 13 (БПОТ2), блоку определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) и блоку определения оценки момента сопротивления на валу электродвигателя 15 (БОМС).
Первый блок определения величины прогноза оценки тока 12 (БПОТ1) соединен с первым блоком определения величины коррекции оценки тока 16 (БКОТ1), который соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), вторым блоком определения величины прогноза оценки тока 13 (БПОТ2) и пятым блоком временной задержки 17 (БВ35). Пятый блок временной задержки 17 (БВ35) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1), второму блоку определения величины прогноза оценки тока 13 (БПОТ2) и первому блоку определения величины коррекции оценки тока 16 (БКОТ1).
Второй блок определения величины прогноза оценки тока 13 (БПОТ2) соединен со вторым блоком определения величины коррекции оценки тока 18 (БКОТ2), который соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), со вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), шестым блоком временной задержки 19 (БВ36), блоком определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), блоком определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) и блоком определения величины оценки электромагнитного момента 20 (БОЭМ).
Шестой блок временной задержки 19 (БВ36) соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), со вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), блоком определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), вторым блоком определения величины коррекции оценки тока 18 (БКОТ2), блоком определения оценки момента сопротивления на валу электродвигателя 15 (БОМС), блоком определения величины оценки электромагнитного момента 20(БОЭМ).
Блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) подключен к блоку коррекции оценки момента сопротивления 21 (БКОМС), который подключен к седьмому блоку временной задержки 22 (БВЗ7) и блоку определения оценки момента сопротивления на валу электродвигателя 15 (БОМС). Седьмой блок временной задержки 22 (БВЗ7) подключен к блоку коррекции оценки момента сопротивления 21 (БКОМС).
Блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ), блоку вывода информации 24 (БВИ) и к восьмому блоку временной задержки 25 (БВЗ8). Восьмой блок временной задержки 25 (БВЗ8) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ). Блок прогноза оценки частоты вращения ротора 23 (БПОЧВ) подключен к блоку коррекции оценки частоты вращения ротора 26 (БКОЧВ).
Блок определения величины оценки электромагнитного момента 20 (БОЭМ) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ) и к девятому блоку временной задержки 27 (БВЗ9). Девятый блок временной задержки 27 (БВЗ9) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ).
Блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) подключен к блокам определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2), к десятому блоку временной задержки 28(БВЗ10) и к блоку вывода информации 24 (БВИ). Десятый блок временной задержки 28(БВЗ10) подключен к блокам определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2) и к блоку коррекции оценки частоты вращения ротора 26 (БКОЧВ).
В качестве датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) использованы датчики напряжения LEM. Датчики фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) датчики тока КЭИ - 0,1. Преобразователь координат 7 (ПК), блоки временной задержки 8 (БВЗ1), 9 (БВЗ2), 10 (БВЗ3), 11 (БВЗ4), 17 (БВЗ5), 19 (БВЗ6), 22 (БВЗ7), 25 (БВЗ8), 27 (БВЗ9), 28 (БВЗ10), блоки определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2), блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС), блок определения величины оценки электромагнитного момента 20 (БОЭМ), блоки определения величины коррекции оценки тока 16 (БКОТ1) и 18 (БКОТ2), блок коррекции оценки момента сопротивления 21 (БКОМС), блок прогноза оценки частоты вращения ротора 23 (БПОЧВ), блок вывода информации 24 (БВИ), блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) выполнены на базе микроконтроллера типа STM32F405RGT6 фирмы STMicroelectronics
Устройство для оценки частоты вращения ротора и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами работает следующим образом.
При подключении к управляемому трехфазному источнику питания синхронного электродвигателя с постоянными магнитами происходит пуск электродвигателя и его выход на установившийся режим работы.
С помощью датчиков фазных напряжений 1(ДН1), 2(ДН2), 3(ДН3) и датчиков фазных токов 4(ДТ1), 5(ДТ2), 6(ДТ3), подключенных к фазам питания электродвигателя, в течение пуска и работы синхронного электродвигателя с постоянными магнитами производят одновременное измерение мгновенных величин фазных токов IA(t), IB(t), IC(t) и фазных напряжений UA(t), UB(t), UC(t) статора. Сигналы от датчиков 1 (ДН1), 2 (ДН2), 3 (ДН3), 4 (ДТ1), 5(ДТ2), 6(ДТ3) поступают в преобразователь координат 7 (ПК), в котором осуществляется их преобразование в величины токов Id(k), Iq(k) и напряжений Ud(k), Uq(k) в прямоугольной dq-системе координат в текущий момент времени при заданном периоде дискретизации Tд.
Одновременно сигналы напряжений Ud(k), Uq(k) на текущем шаге дискретизации передают соответственно во второй и третий блоки временной задержки 9(БВЗ2) и 10(БВЗ3), а сигналы токов Id(k), Iq(k) на текущем шаге дискретизации передают соответственно в первый и четвертый блоки временной задержки 8(БВЗ1) и 11 (БВЗ4). В блоках временной задержки 8(БВЗ1), 9(БВЗ2), 10(БВЗ3) и 11 (БВЗ4) выполняют временную задержку сигналов на один период дискретизации. На выходе блоков получают сигналы токов Id(k-1), Iq(k-1) и напряжений Ud(k-1), Uq(k-1) на предыдущем шаге дискретизации.
Для определения величины прогноза оценки тока  на текущем шаге дискретизации одновременно в первый блок определения величины прогноза оценки тока 12 (БПОТ1) поступают сигналы:
на текущем шаге дискретизации одновременно в первый блок определения величины прогноза оценки тока 12 (БПОТ1) поступают сигналы:
из преобразователя координат 7 (ПК) - сигналы тока  и напряжения
и напряжения  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из первого блока временной задержки 8 (БВЗ1) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока временной задержки 9 (БВЗ2) - сигнал напряжения  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из пятого блока временной задержки 17 (БВЗ5) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 БКОТ2 - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из блока коррекции оценки частоты вращения ротора 26 (БКОЧВ) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из десятого блока временной задержки 28 (БВЗ10) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины прогноза оценки тока  на текущем шаге дискретизации в первом блоке определения величины прогноза оценки тока 12 (БПОТ1) осуществляют по выражению:
на текущем шаге дискретизации в первом блоке определения величины прогноза оценки тока 12 (БПОТ1) осуществляют по выражению:

где  - активное сопротивление обмотки статора, Ом;
- активное сопротивление обмотки статора, Ом;
 - эквивалентная индуктивность обмотки статора, Гн;
- эквивалентная индуктивность обмотки статора, Гн;
 - коэффициент передачи отработки невязки тока статора по оси d в вращающейся dq-системе координат,
- коэффициент передачи отработки невязки тока статора по оси d в вращающейся dq-системе координат,  = 0 Ом;
= 0 Ом;
k - шаг дискретизации;
Tд - период дискретизации, с.
Для определения величины прогноза оценки тока  на текущем шаге дискретизации одновременно во второй блок определения величины прогноза оценки тока 13 (БПОТ2) поступают сигналы:
на текущем шаге дискретизации одновременно во второй блок определения величины прогноза оценки тока 13 (БПОТ2) поступают сигналы:
из преобразователя координат 7 (ПК) - сигналы тока  и напряжения
и напряжения  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из третьего блока временной задержки 10 (БВЗ3) -сигнал напряжения  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из четвертого блока временной задержки 11 (БВЗ4) -сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из пятого блока временной задержки 17 (БВЗ5) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 (БКОТ2) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из блока коррекции оценки частоты вращения ротора 26 (БКОЧВ) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации.
на текущем шаге дискретизации.
из десятого блока временной задержки 28 (БВЗ10) -сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины прогноза оценки тока  на текущем шаге дискретизации во втором блоке определения величины прогноза оценки тока 13 (БПОТ2) осуществляют согласно следующему выражению:
на текущем шаге дискретизации во втором блоке определения величины прогноза оценки тока 13 (БПОТ2) осуществляют согласно следующему выражению:

где  - потокосцепление постоянного магнита ротора, Вб;
- потокосцепление постоянного магнита ротора, Вб;
 - коэффициент передачи отработки невязки тока статора по оси q в вращающейся dq-системе координат,
- коэффициент передачи отработки невязки тока статора по оси q в вращающейся dq-системе координат,  = - 1,2 Ом.
= - 1,2 Ом.
Определение величины коррекции оценки тока  в первом и втором блоках определения величины коррекции оценки тока 16 (БКОТ1) и 18 (БКОТ2) соответственно выполняют согласно выражениям:
в первом и втором блоках определения величины коррекции оценки тока 16 (БКОТ1) и 18 (БКОТ2) соответственно выполняют согласно выражениям:
Для определения величины прогноза оценки момента сопротивления синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации одновременно в блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) поступают сигналы:
на текущем шаге дискретизации одновременно в блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) поступают сигналы:
из преобразователя координат 7 (ПК) - сигнал тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из четвертого блока временной задержки 11 (БВЗ4) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 (БКОТ2) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины прогноза оценки момента сопротивления синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) осуществляют по выражению:
на текущем шаге дискретизации в блоке определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) осуществляют по выражению:
 ,
,
где  - коэффициент интегральной отработки,
- коэффициент интегральной отработки,  ;
;
 - число пар полюсов.
- число пар полюсов.
Для определения величины коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блок коррекции оценки момента сопротивления 21 (БКОМС) поступают сигналы:
на текущем шаге дискретизации в блок коррекции оценки момента сопротивления 21 (БКОМС) поступают сигналы:
из блока определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) - сигнал прогноза оценки момента сопротивления синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из седьмого блока временной задержки 22 (БВЗ7) - сигнал прогноза оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке коррекции оценки момента сопротивления 21 (БКОМС) осуществляют по выражению:
на текущем шаге дискретизации в блоке коррекции оценки момента сопротивления 21 (БКОМС) осуществляют по выражению:

Для определения величины оценки момента сопротивления на валу  на текущем шаге дискретизации в блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) поступают сигналы:
на текущем шаге дискретизации в блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) поступают сигналы:
из преобразователя координат 7 (ПК) - сигнал тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из четвертого блока временной задержки 11 (БВЗ4) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 (БКОТ2) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из блока коррекции оценки момента сопротивления 21 (БКОМС) - сигнал коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации.
на текущем шаге дискретизации.
Определение оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) осуществляют по выражению:
на текущем шаге дискретизации в блоке определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) осуществляют по выражению:

где  - коэффициент пропорциональной отработки,
- коэффициент пропорциональной отработки, 
Для определения величины прогноза оценки частоты вращения ротора  на текущем шаге дискретизации в блок прогноза оценки частоты вращения ротора 23 (БПОЧВ) поступают сигналы:
на текущем шаге дискретизации в блок прогноза оценки частоты вращения ротора 23 (БПОЧВ) поступают сигналы:
из блока определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) - сигнал оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из блока определения величины оценки электромагнитного момента 20 (БОЭМ) - сигнал оценки электромагнитного момента на текущем шаге дискретизации;
из восьмого блока временной задержки 25 (БВЗ8) - сигнал оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из девятого блока временной задержки 27 (БВЗ9) - сигнал оценки электромагнитного момента на предыдущем шаге дискретизации.
Определение величины прогноза оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке прогноза оценки частоты вращения ротора 23(БПОЧВ) осуществляют по выражению:
на текущем шаге дискретизации в блоке прогноза оценки частоты вращения ротора 23(БПОЧВ) осуществляют по выражению:

где  - эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг м2.
- эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг м2.
Для определения величины коррекции оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) поступают сигналы:
на текущем шаге дискретизации в блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) поступают сигналы:
из блока прогноза оценки частоты вращения ротора 23 (БПОЧВ) - сигнал прогноза оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из десятого блока временной задержки 28 (БВЗ10) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  определяют по выражению:
определяют по выражению:

Результаты определения оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  из блока коррекции оценки частоты вращения 26 (БКОЧВ) и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
из блока коррекции оценки частоты вращения 26 (БКОЧВ) и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  из блока определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) передают в блок вывода информации 24 (БВИ).
из блока определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) передают в блок вывода информации 24 (БВИ).
Таким образом, предложенное устройство позволяет получить сигнал оценки частоты вращения ротора и сигнал оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2832962C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2818309C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476983C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА ЩЕТОК ЩЕТОЧНО-КОНТАКТНОГО АППАРАТА СИНХРОННЫХ ГЕНЕРАТОРОВ | 2007 |
|
RU2383029C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОШИБКИ СЛЕЖЕНИЯ И СИГНАЛА КОРРЕКЦИИ ПОКАЗАНИЙ СЛЕДЯЩЕГО ФИЛЬТРА КОМПЛЕКСНОЙ ОГИБАЮЩЕЙ ВХОДНОГО СИГНАЛА | 2006 |
|
RU2346292C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2705939C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2022 |
|
RU2789019C1 |
Изобретение относится к электротехнике, а именно к электрическим машинам и измерительной технике и может быть использовано для цифрового управления синхронным электродвигателем с постоянными магнитами. Технический результат: уменьшение ресурсоемкости вычислений и расширение функциональных возможностей электропривода для применения в сложных технологических процессах. Технический результат достигается тем, что устройство получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами содержит датчики фазных напряжений (1), (2), (3) и фазных токов (4), (5), (6), преобразователь координат (7), блоки временной задержки (8, 9, 10, 11, 17, 19, 22, 25, 27, 28), блоки определения величины прогноза оценки тока (12, 13), блок определения прогноза оценки момента сопротивления на валу электродвигателя (14), блок определения оценки момента сопротивления на валу электродвигателя (15), блоки определения величины коррекции оценки тока (16, 18), блок определения величины оценки электромагнитного момента (20), блок коррекции оценки момента сопротивления (21), блок прогноза оценки частоты вращения ротора (23), блок вывода информации (24), блок коррекции оценки частоты вращения ротора (26). 1 ил.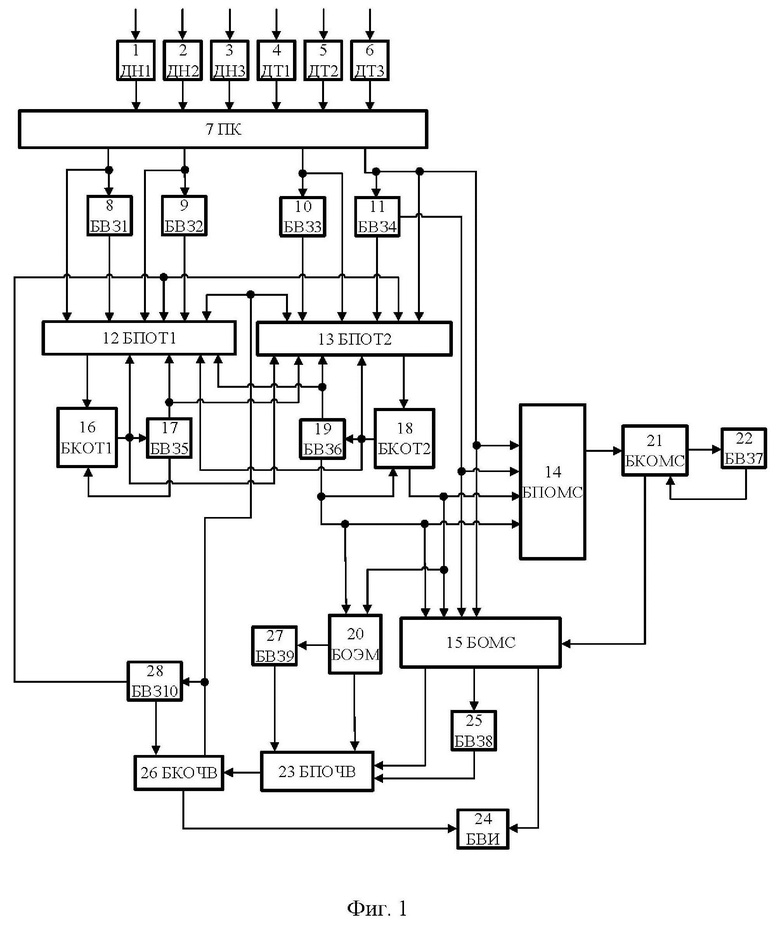
Устройство получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, характеризующееся тем, что содержит три датчика фазных напряжений (1, 2, 3) и три датчика фазных токов (4, 5, 6), входы которых подключены к фазам питания синхронного электродвигателя с постоянными магнитами, а выходы подключены к преобразователю координат (7), выходы которого подключены к первому (8), второму (9), третьему (10) и четвертому (11) блокам временной задержки, первому (12) и второму (13) блокам определения величины прогноза оценки тока, блоку определения прогноза оценки момента сопротивления на валу электродвигателя (14) и блоку определения оценки момента сопротивления на валу электродвигателя (15), первый (8) и второй блоки временной задержки (9) подключены к первому блоку определения величины прогноза оценки тока (12), третий блок временной задержки (10) подключен ко второму блоку определения величины прогноза оценки тока (13), четвертый блок временной задержки (11) подключен ко второму блоку определения величины прогноза оценки тока (13), к блоку определения прогноза оценки момента сопротивления на валу электродвигателя (14) и к блоку определения оценки момента сопротивления на валу электродвигателя (15), первый блок определения величины прогноза оценки тока (12) соединен с первым блоком определения величины коррекции оценки тока (16), который соединен со вторым блоком определения величины прогноза оценки тока (13), пятым блоком временной задержки (17) и с первым блоком определения величины прогноза оценки тока (12), пятый блок временной задержки (17) подключен к первому блоку определения величины прогноза оценки тока (12), ко второму блоку определения величины прогноза оценки тока (13) и к первому блоку определения величины коррекции оценки тока (16), второй блок определения величины прогноза оценки тока (13) соединен со вторым блоком определения величины коррекции оценки тока (18), который соединен с первым блоком определения величины прогноза оценки тока (12), со вторым блоком определения величины прогноза оценки тока (13), с шестым блоком временной задержки (19), с блоком определения прогноза оценки момента сопротивления на валу электродвигателя (14), с блоком определения оценки момента сопротивления на валу электродвигателя (15) и с блоком определения величины оценки электромагнитного момента (20), шестой блок временной задержки (19) соединен с первым (12) и вторым (13) блоками определения величины прогноза оценки тока, со вторым блоком определения величины коррекции оценки тока (18), с блоком определения прогноза оценки момента сопротивления на валу электродвигателя (14), с блоком определения оценки момента сопротивления на валу электродвигателя (15) и с блоком определения величины оценки электромагнитного момента (20), при этом блок определения прогноза оценки момента сопротивления на валу электродвигателя (14) подключен к блоку коррекции оценки момента сопротивления (21), который подключен к седьмому блоку временной задержки (22) и к блоку определения оценки момента сопротивления на валу электродвигателя (15), седьмой блок временной задержки (22) подключен к блоку коррекции оценки момента сопротивления (21), блок определения оценки момента сопротивления на валу электродвигателя (15) подключен к блоку прогноза оценки частоты вращения ротора (23), к блоку вывода информации (24) и к восьмому блоку временной задержки (25), который соединен с блоком прогноза оценки частоты вращения ротора (23), который подключен к блоку коррекции оценки частоты вращения ротора (26), а блок определения величины оценки электромагнитного момента (20) подключен к блоку прогноза оценки частоты вращения ротора (23) и к девятому блоку временной задержки (27), который подключен к блоку прогноза оценки частоты вращения ротора (23), блок коррекции оценки частоты вращения ротора (26) подключен к первому (12) и второму (13) блокам определения величины прогноза оценки тока, к десятому блоку временной задержки (28) и к блоку вывода информации (24), десятый блок временной задержки (28) соединен с первым (12) и вторым (13) блоками прогноза оценки тока и с блоком коррекции оценки частоты вращения ротора (26).
| CN 117200622 A, 08.12.2023 | |||
| CN 116915110 A, 20.10.2023 | |||
| CN 110808703 A, 18.02.2020 | |||
| Устройство измерения неравномерности мгновенной частоты вращения вала | 2018 |
|
RU2703274C1 |
| Способ управления двигателем с постоянными магнитами и соответствующая система | 2013 |
|
RU2624255C2 |
| CN 114977663 A, 30.08.2022. | |||

