риг.1
Изобретение относится к электротехнике, в частности для определения параметров асинхронного электродвигателя,
Целью изобретения является повышение точности определения параметров двигателя.
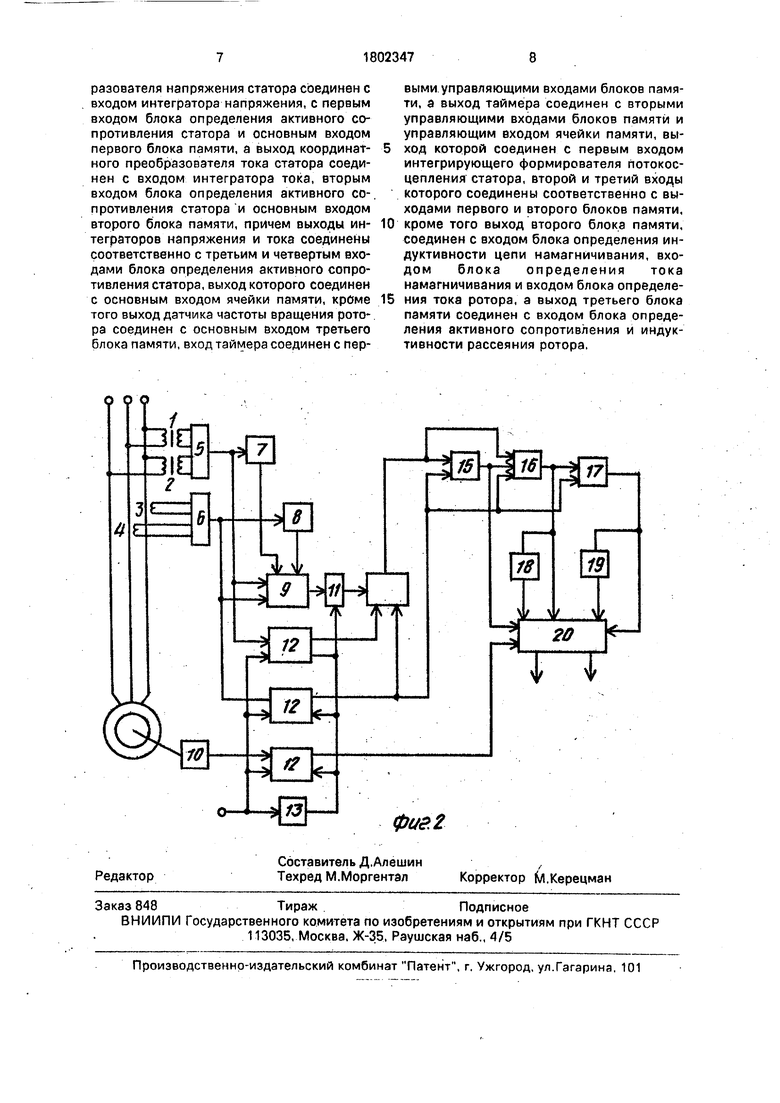
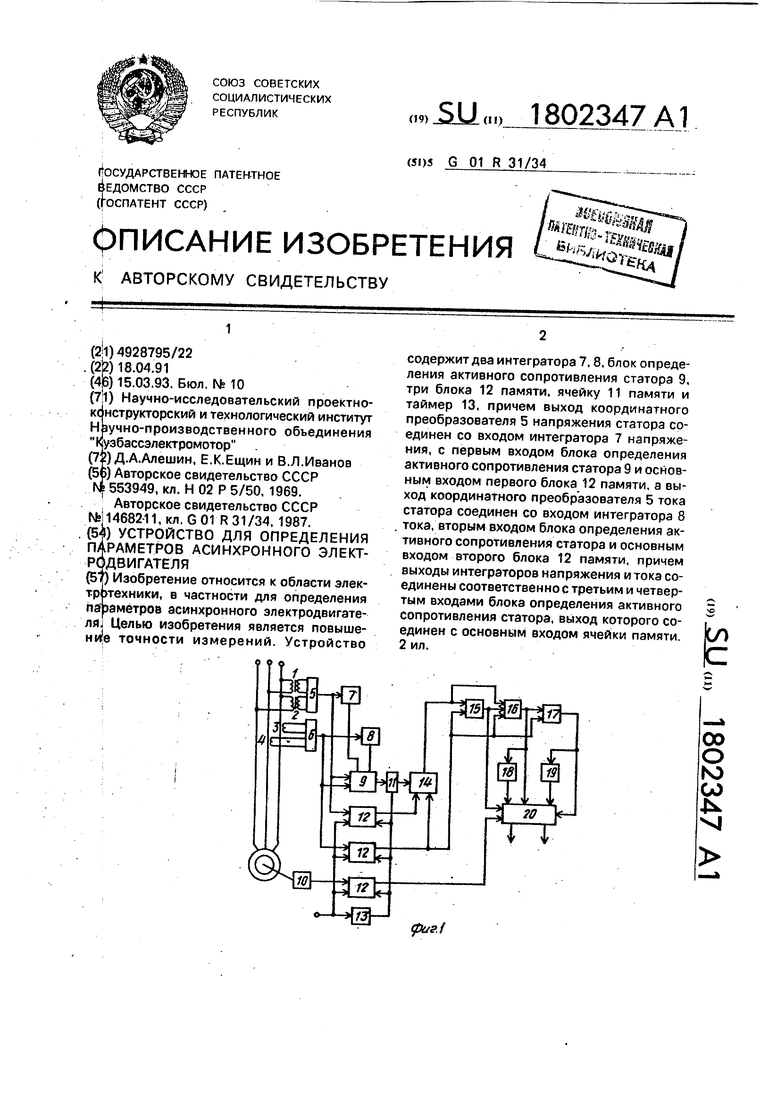
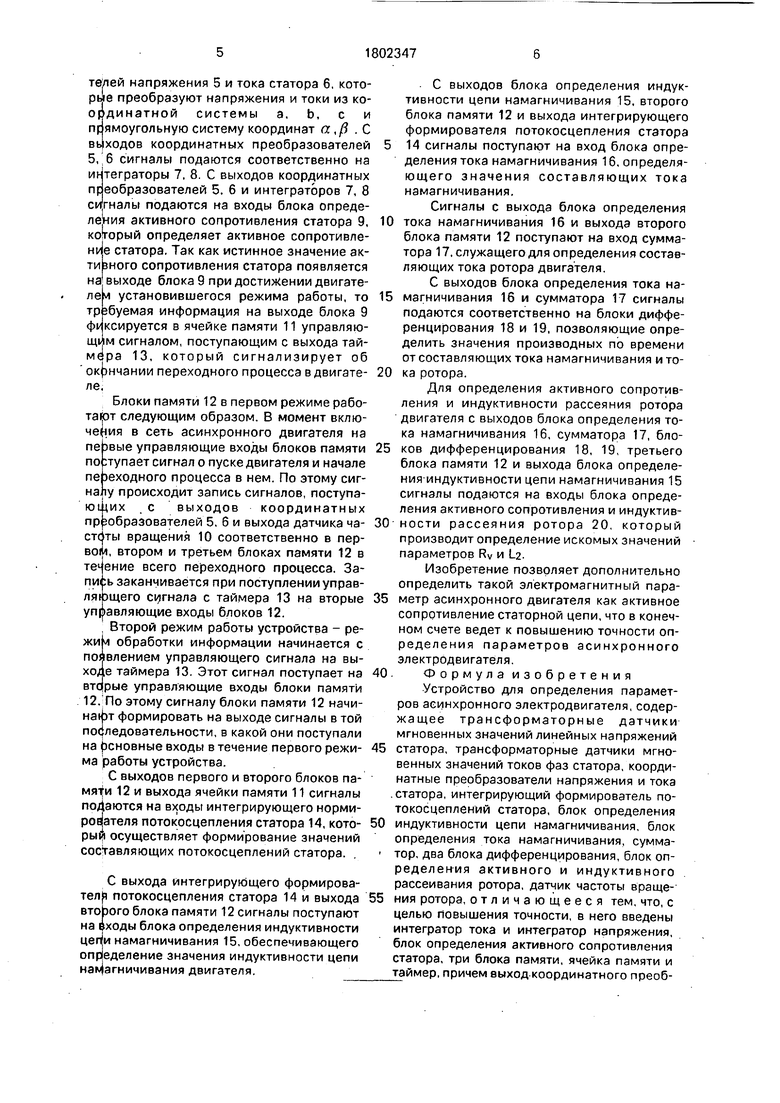
На фиг. 1 представлен первоначальный режим получения и запоминания исходной информации и определения активного сопротивления статора; на фиг. 2 - окончательный режим обработки информации,
Устройство для определения параметров асинхронных электродвигателей содержит трансформаторные датчики 1, 2 мгновенных значений линейных напряжений статора, трансформаторные датчики 3, 4 мгновенных значений токов фаз статора, координатные преобразователи 5, 6 напряжения статора и тока статора, интеграторы 7 и 8, блок определения активного сопротивления статора. 9, датчик частоты вращения ротора 10, ячейка памяти 11, три блока памяти 12. таймер 13, интегрирующий формирователь потокосцепления статора 14, блок определения тока намагничивания 16, блок определения индуктивности цепи намагничивания 15, сумматор 17, блоки дифференцирования 18, 19, блок определения активного сопротивления и индуктивности рассеяния ротора 20, причем выходы трансформаторных датчиков 1,2 мгновенных значений линейных напряжений статора соединены со входами координатного преобразователя 5, а выходы трансформаторных датчиков 3, 4 мгновенных знач.ений токов фаз статора - со входами координатного преобразователя 6. Выход координатного преобразователя 5 соединен со входом интегратора 7, с первым входом блока определения активного сопротивления статора 9 и основным входом первого блока памяти 12. Выход координатного преобразователя 6 соединен со входом интегратора 8, вторым входом блока определения активного сопротивления статора 9 и основным входом второго блока памяти 12. Выходы интеграторов 7, 8 соединены соответственно с третьим и четвертым входами блока определения активного сопротивления статора 9, выход которого соединен с основным входом ячейки памяти 11. Выход датчика часто- ты вращения ротора 10 соединен с основным входом третьего блока памяти 12. Вход таймера 13 соединен с первыми управляющими входами блоков памяти 12, а выход таймера 13 соединен со вторыми управляющими входами блоков памяти 12 и управляющим входом ячейки памяти 11. Выход ячейки памяти 11 соединен с первым входом интегрирующего формирователя потокосцепления статора 14, второй и третий входы которого соединены соответственно с выходами первого и второго блоков памяти 12. Входы блока определения индуктивности цепи намагничивания 15 соединены с выходом интегрирующего формирователя потокосцепления статора 14 и выходом второго блока памяти 12, Входы блока определения тока намагничивания 16 соединены с
0 выходом интегрирующего формирователя потокосцепления статора 14, выходом блока определения индуктивности цепи намагничивания и выходом второго блока памяти .12. Входы сумматора 17 соединены с выхо5 дом блока определения тока намагничивания 16 и выходом второго блока памяти 12. Вход блока дифференцирования 18 соединен с выходом блока определения тока на- магничивания 16, а вход блока
0 дифференцирования 19 - с выходом сумматора 17. Входы блока определения активного сопротивления и индуктивности рассеяния ротора 20 соединены с выходом третьего блока памяти 12, выходом блока
5 определения индуктивности цепи намагничивания 15, выходами блоков дифференцирования 18 и 19, выходом блока определения тока намагничивания 16 и выходом сумматора 17.
0 Работа устройства осуществляется следующим образом.
Предусмотрены два, последовательных во времени, режима работы. Первый - ре- Жим получения и запоминания исходной ин5 формации и определения активного сопротивления статора. Второй - режим обработки информации. На схемах блоки и связи, соответствующие нахождению устройства в каждом режиме выделены утол0 щенными линиями.
Длительность первого режима определяется промежутком времени от момента пуска двигателя прямым включением в сеть до момента окончания переходного процес5 са в двигателе, т.е., когда ш const. Это время отсчитывается таймером 13, который выдает сигнал об окончании работы устройства в первом режиме и переключении устройства во второй режим.
0 Первый режим работы устройства - режим получения и запоминания исходной информации и определения активного сопротивления статора осуществляется следующим образом.
5 с помощью измерительных трансформаторов напряжений 1, 2 и измерительных трансформаторов тока 3, 4 измеряются мгновенные значения напряжений и токов в питающей сети. Их выходные сигналы подаются на входы координатных преобразователей напряжения 5 и тока статора 6, которые преобразуют напряжения и токи из координатной системы а, Ь, с и прямоугольную систему координат а,/ . С вЦходов координатных преобразователей 5, 6 сигналы подаются соответственно на интеграторы 7, 8. С выходов координатных преобразователей 5. 6 и интеграторов 7, 8 сигналы подаются на входы блока опреде- ле|ния активного сопротивления статора 9, который определяет активное сопротивление статора. Так как истинное значение ак- тизного сопротивления статора появляется на выходе блока 9 при достижении двигателей установившегося режима работы, то требуемая информация на выходе блока 9 фиксируется в ячейке памяти 11 управляю- 1ш|м сигналом, поступающим с выхода таймера 13, который сигнализирует об окончании переходного процесса в двигателе;
Блоки памяти 12 в первом режиме работают следующим образом. В момент вклю- че.ия в сеть асинхронного двигателя на эвые управляющие входы блоков памяти ггупает сигнал о пуске двигателя и начале
nei noi
пе| на,
зеходного процесса в нем. По этому сиг- iy происходит запись сигналов, поступающих с выходов координатных преобразователей 5. 6 и выхода датчика частоты вращения 10 соответственно в первом, втором и третьем блоках памяти 12 в течение всего переходного процесса. За- пиЈь заканчивается при поступлении управ- ляйэщего сигнала с таймера 13 на вторые управляющие входы блоков 12.
Второй режим работы устройства - ре- жии обработки информации начинается с появлением управляющего сигнала на вы- холе таймера 13. Этот сигнал поступает на вторые управляющие входы блоки памяти 12.;По этому сигналу блоки памяти 12 начи- нафт формировать на выходе сигналы в той последовательности, в какой они поступали на рсновные входы в течение первого режима работы устройства.
С выходов первого и второго блоков па- мя|и 12 и выхода ячейки памяти 11 сигналы подаются на входы интегрирующего норми- рователя потокосцепления статора 14, который осуществляет формирование значений составляющих потокосцеплений статора. .
С выхода интегрирующего формирова- тел}ч потокосцепления статора 14 и выхода втоЬого блока памяти 12 сигналы поступают на входы блока определения индуктивности цег|и намагничивания 15, обеспечивающего определение значения индуктивности цепи намагничивания двигателя.
С выходов блока определения индуктивности цепи намагничивания 15, второго блока памяти 12 и выхода интегрирующего формирователя потокосцепления статора 5 14 сигналы поступают на вход блока определения тока намагничивания 16, определяющего значения составляющих тока намагничивания.
Сигналы с выхода блока определения
0 тока намагничивания 16 и выхода второго блока памяти 12 поступают на вход сумматора 17, служащего для определения составляющих тока ротора двигателя.
С выходов блока определения тока на5 магничивания 16 и сумматора 17 сигналы подаются соответственно на блоки дифференцирования 18 и 19, позволяющие определить значения производных по времени от составляющих тока намагничивания и то0 ка ротора.
Для определения активного сопротивления и индуктивности рассеяния ротора двигателя с выходов блока определения тока намагничивания 16, сумматора 17, бло5 ков дифференцирования 18, 19, третьего блока памяти 12 и выхода блока определения-индуктивности цепи намагничивания 15 сигналы подаются на входы блока определения активного сопротивления и индуктив0 ности рассеяния ротора 20, который производит определение искомых значений параметров Rv и L2.
Изобретение позволяет дополнительно определить такой электромагнитный пара5 метр асинхронного двигателя как активное сопротивление статорной цепи, что в конечном счете ведет к повышению точности определения параметров асинхронного электродвигателя.
0. Формула изобретения
Устройство для определения параметров асинхронного электродвигателя, содержащее трансформаторные датчики мгновенных значений линейных напряжений
5 статора, трансформаторные датчики мгновенных значений токов фаз статора, координатные преобразователи напряжения и тока .статора, интегрирующий формирователь потокосцеплений статора, блок определения
0 индуктивности цепи намагничивания, блок
определения тока намагничивания, сумма тор, два блока дифференцирования, блок определекия активного и индуктивного
рассеивания ротора, датчик частоты враще5 ния ротора, отличающееся тем, что, с целью повышения точности, в него введены интегратор тока и интегратор напряжения, блок определения активного сопротивления статора, три блока памяти, ячейка памяти и таймер, причем выход-координатного преобразоаателя напряжения статора соединен с входом интегратора напряжения, с первым входом блока определения активного сопротивления статора и основным входом первого блока памяти, а выход координатного преобразователя тока статора соединен с входом интегратора тока, вторым входом блока определения активного со-, противления статора и основным входом второго блока памяти, причем выходы интеграторов напряжения и тока соединены соответственно с третьим и четвертым входами блока определения активного сопротивления статора, выход которого соединен с основным входом ячейки памяти, кроме того выход датчика частоты вращения ротора соединен с основным входом третьего блока памяти, вход таймера соединен с первыми управляющими входами блоков памяти, а выход таймера соединен с вторыми управляющими входами блоков памяти и управляющим входом ячейки памяти, выход которой соединен с первым входом интегрирующего формирователя потокос- цепления статора, второй и третий входы которого соединены соответственно с выходами первого и второго блоков памяти,
кроме того выход второго блока памяти, соединен с входом блока определения индуктивности цепи намагничивания, входом блока определения тока намагничивания и входом блока определения тока ротора, а выход третьего блока памяти соединен с входом блока определения активного сопротивления и индуктивности рассеяния ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров асинхронных электродвигателей | 1987 |
|
SU1468211A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для определения параметров трехфазной асинхронной машины | 1969 |
|
SU553949A3 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |