Область техники, к которой относится изобретение
Изобретение относится к области робототехники и предназначено для построения колесных андроидных роботов.
Уровень техники
Андроидный робот должен обладать способностью поднимать вещи с пола и класть их на стол. Для этого используют шарнирные соединения в области талии робота, при которых робот может наклонять туловище, доставая руками до пола, а также ползунковые конструкции или конструкции, основанные на серии подвижных параллелограммов, когда торс робота движется поступательно вверх-вниз. Типовой вес андроидных роботов составляет 40-60 кг, поэтому конструкция для подъема торса должна быть достаточно прочной. Некоторые конструкции, использующие вертикальный подъем торса, используют стандартные направляющие от станков с ЧПУ, вследствие чего за спиной робота остается неподвижный подъемный механизм (см., например, http://www.hizook.com/blog/2010/08/01/volksbot-omni-holonomic-robot-base-using-only-robotis-dynamixel-servos, http://walyou.com/meka-robot/meka-robot-1/), ухудшающий дизайн робота.
Известно устройство подъема торса робота [Патент CN 101612730 В], в котором наклон торса выполняется с помощью шарнирного соединения. Недостатком такой конструкции является снижение устойчивости при наклоне торса, поскольку наклон связан со смещением центра тяжести относительно колес робота.
Известна также широко используемая в мебельной промышленности стандартная телескопическая шариковая направляющая для мебельных ящиков (см., например, http://logatask.ru/t945035z-sharikovye-napravljajuschie-polnogo-vydvizhenija-armstrong-p-2493.html), состоящая из параллельно расположенных П-образных планок, вложенных одна в другую, между которыми расположены стальные шарики для уменьшения сил трения. Несмотря на ее другое назначение, эта направляющая используется для построения недорогих станков с ЧПУ и может быть использована в робототехнике. Недостатком этого устройства является отсутствие механизма автоматического раздвижения устройства и недостаточная жесткость.
Наиболее близким к предлагаемому устройству по технической сути (прототипом) является устройство подъема торса робота (патент US 2012/0061155 A1, fig.3J), в котором используется неподвижная планка, вдоль которой движется направляющая с помощью пары винт-гайка, в которой винт вращается электродвигателем. Недостатком такой конструкции является недостаточная жесткость, плохая технологичность (отсутствие стандартных деталей) и высокая сложность.
Сущность изобретения
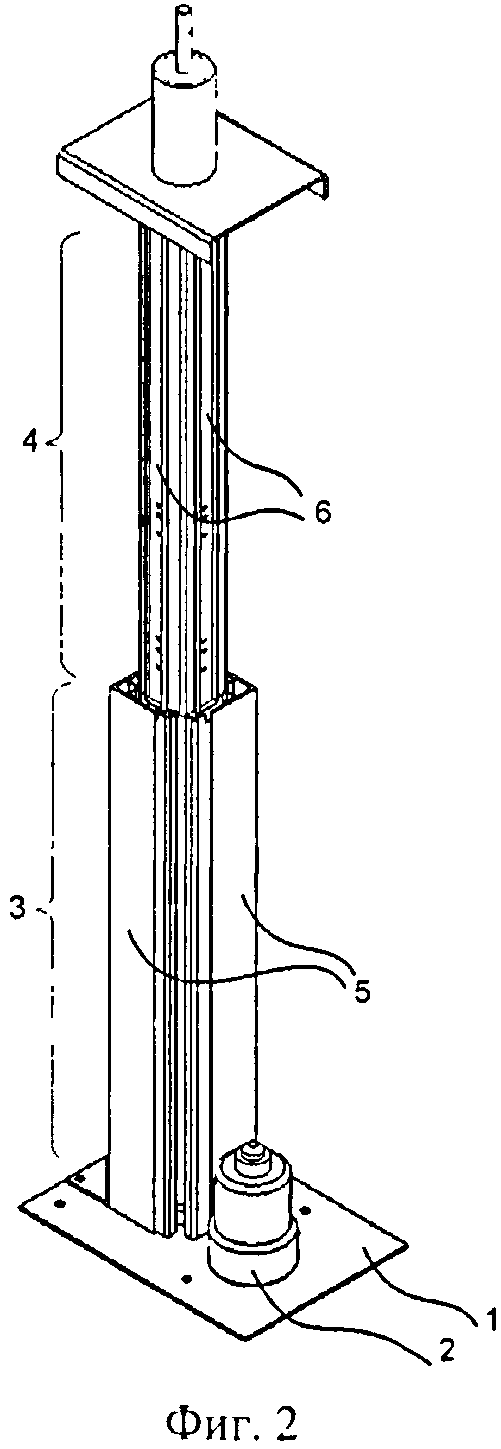
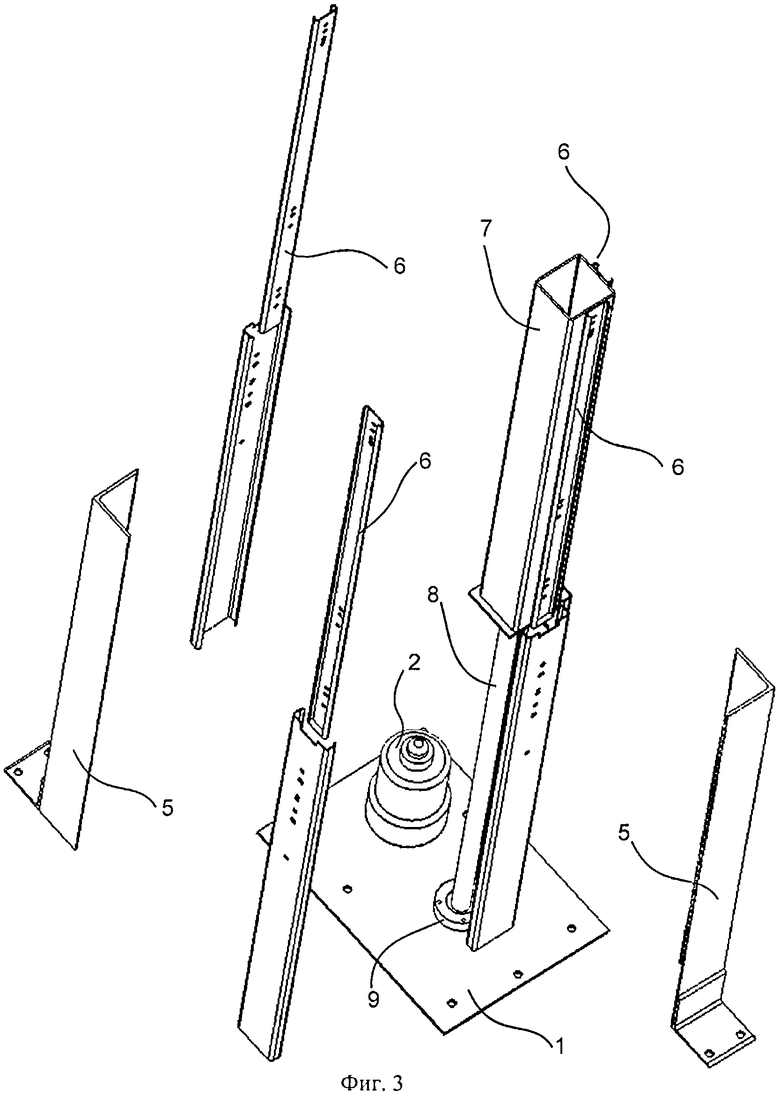
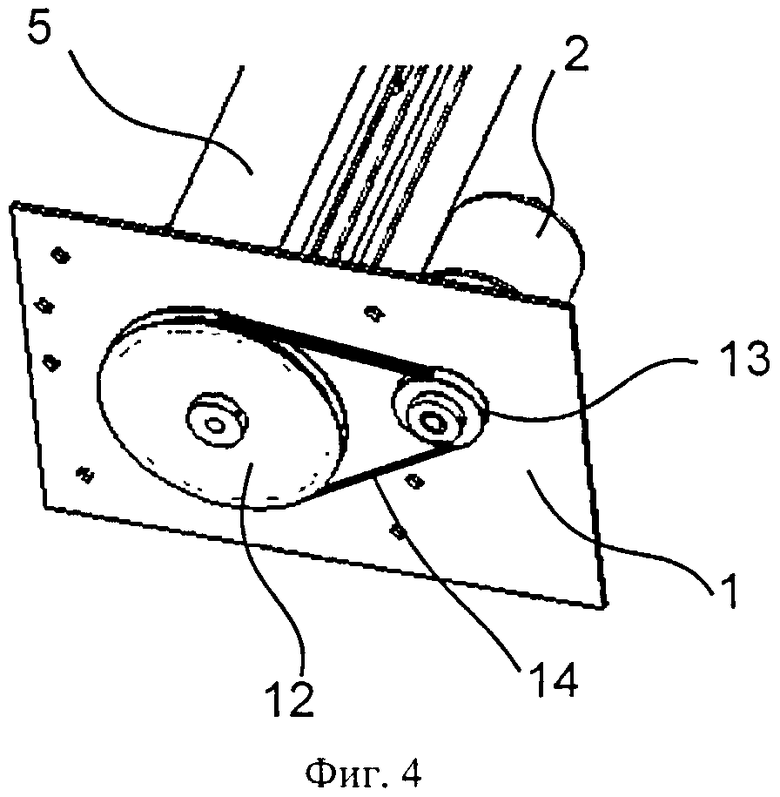
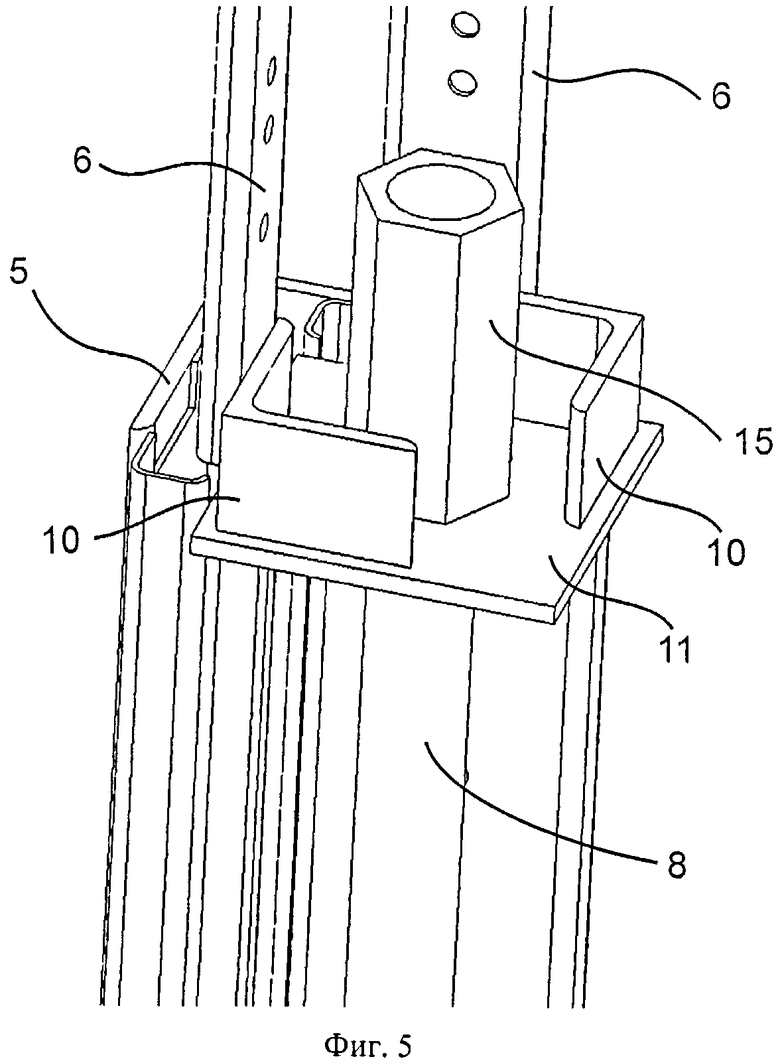
В предлагаемом изобретении движение торса робота осуществляется поступательно вверх или вниз (фиг. 1 и 2) с помощью телескопического подъемного устройства, состоящего из подвижной 4 и неподвижной 3 части, прикрепленной к основанию 1. Раздвижение устройства осуществляется, как у прототипа, парой винт-гайка, состоящей из винта (фиг. 3, поз. 8), опирающегося на подшипник 9, и гайки 15 (фиг. 5). Гайка 15 прикреплена к пластине 11, на которую опирается труба прямоугольного сечения 7 (фиг. 3), движение которой в горизонтальном направлении ограничено двумя ограничительными уголками 10 (фиг. 5), прикрепленными к пластине 11. Вращение винта осуществляется с помощью двигателя 2 (фиг. 4), через ременную передачу, состоящую из шкивов 12 и 13 и ремня 14. Жесткость и прочность конструкции обеспечивают два прочных неподвижных несущих уголка 5 (фиг. 3) и труба прямоугольного сечения 7. Движение трубы 7 внутри несущих уголков 5 обеспечивается благодаря четырем стандартным телескопическим шариковым направляющим 6, которые располагаются между трубой прямоугольного сечения и несущими уголками 5, по одной направляющей с каждой из четырех сторон трубы прямоугольного сечения 7.
Техническим результатом описанной конструкции является повышение жесткости конструкции, обеспеченной применением трубы прямоугольного сечения 7 и двух несущих уголков 5, а также повышение технологичности сборки, связанной с применением стандартных телескопических шариковых направляющих. Описанная конструкция также более проста, чем у прототипа.
Перечень фигур чертежей и иных материалов
Фиг. 1 - общий вид устройства в составе андроидного робота. Здесь 1 - основание; 2 - двигатель; 3 - неподвижная часть телескопического устройства подъема торса робота; 4 - подвижная часть.
Фиг. 2 - устройство подъема торса робота в сборе. Здесь 1 - основание; 2 - двигатель; 3 - неподвижная часть телескопического устройства подъема торса робота; 4 - подвижная часть; 5 - два несущих уголка; 6 - стандартные телескопические шариковые направляющие.
Фиг. 3 - устройство подъема торса робота в частично разобранном виде. Здесь 1 - основание; 2 - двигатель; 5 - два несущих уголка; 6 - стандартные телескопические шариковые направляющие; 7 - труба прямоугольного сечения; 8 - винт; 9 - подшипник.
Фиг. 4 - вид снизу на устройство подъема торса робота. Здесь 1 - основание; 2 - двигатель; 5 - несущий уголок; 12 и 13 - шкивы; 14 - ремень.
Фиг. 5 - узел винт-гайка. Здесь 5 - несущий уголок; 6 - стандартные шариковые телескопические направляющие; 8 - винт; 10 - ограничительные уголки; 11- пластина; 15 - гайка.
Сведения, подтверждающие возможность осуществления изобретения
Предлагаемое изобретение является телескопическим подъемным устройством, состоящим из (фиг. 1 и 2) подвижной 4 и неподвижной 3 части, прикрепленной к основанию 1. Винт (фиг. 3, поз. 8) опирается на подшипник 9. Гайка 15 (фиг. 5) прикреплена к пластине 11, на которую опирается труба прямоугольного сечения 7 (фиг. 3), движение которой в горизонтальном направлении ограничено двумя ограничительными уголками 10 (фиг. 5), прикрепленными к пластине 11. Снизу винта закреплен шкив 12 (фиг. 4), соединенный ремнем 14 со шкивом 13, который насажен на ось двигателя 2, закрепленного на основании 1. К каждой из четырех сторон трубы прямоугольного сечения 7 (фиг. 3) прикреплены подвижные части стандартных шариковых телескопических направляющих 6 (фиг. 3), неподвижные части которых прикреплены к двум несущим уголкам 5, которые закреплены на несущей пластине 1.
Работа устройства состоит в следующем. Для подъема торса робота включают двигатель 2. Вращение вала двигателя передается через ременную передачу, состоящую из двух шкивов 12 и 13 и ремня 14, на винт 8. Винт, вращаясь, продвигает вдоль себя гайку 15, которая защищена от проворачивания уголками 10, закрепленными на пластине 11, прикрепленной к гайке 15. Поэтому пластина 11, двигаясь вместе с гайкой, приподнимает опирающуюся на нее трубу прямоугольного сечения 7. Труба движется вверх, поднимая вместе с собой прикрепленный к ней торс робота. Для опускания торса двигатель вращают в противоположном направлении.
По мнению автора, сущность заявляемого изобретения не следует для специалиста явным образом из известного уровня техники, поскольку существующие патенты на аналогичные устройства не содержат описанной конструкции и в то же время не обладают качествами, свойственными предлагаемому изобретению (жесткость конструкции, технологичность, простота).
Предложенная конструкция испытана экспериментально, достаточно проста, технологична и в настоящее время готовится технологическая оснастка для ее серийного производства. Видеоклип, подтверждающий осуществимость изобретения, можно увидеть в интернете по адресу http://vvww.youtube.com/watch?v=3hwDe11SzjI.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУСТАВ РУКИ РОБОТА | 2013 |
|
RU2564799C2 |
| КИСТЬ РУКИ РОБОТА | 2013 |
|
RU2551740C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| АНАЛИТИЧЕСКАЯ ПОЛОТЕННАЯ ГОРКА БУРКОВА Л.Н. | 2008 |
|
RU2375125C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2015 |
|
RU2601824C1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| ЛЕНТОЧНОЕ КОНВЕЙЕРНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМЫМ ВЕДОМЫМ ШКИВОМ | 2008 |
|
RU2415066C1 |
| КОНВЕЙЕРНЫЙ МЕХАНИЗМ С ШАРНИРНЫМ СОЕДИНИТЕЛЕМ | 2008 |
|
RU2424937C2 |
Изобретение относится к области робототехники и предназначено для построения колесных андроидных роботов. Устройство для подъема и пускания торса андроидного робота содержит основание, на котором закреплен двигатель, и гайку, навинченную на винт, опирающийся на подшипник. Гайка соединена с пластиной, на которой закреплены два ограничительных уголка, предотвращающие поворот гайки и соединенные с трубой прямоугольного сечения. К трубе присоединен торс и к каждой из четырех ее сторон прикреплены подвижные части четырех телескопических шариковых направляющих, неподвижные части которых закреплены на двух несущих уголках, прикрепленных к основанию. На винт и ось двигателя насажены шкивы, соединенные ремнем, а труба прямоугольного сечения и несущие уголки расположена коллинеарно с винтом. Изобретение обеспечивает повышение жесткости, технологичности и упрощение конструкции. 5 ил.
Устройство для подъема и опускания торса андроидного робота, содержащее основание, на котором закреплен двигатель, и гайку, навинченную на винт, опирающийся на подшипник, отличающееся тем, что гайка соединена с пластиной, на которой закреплены два ограничительных уголка, предотвращающие поворот гайки и соединенные с трубой прямоугольного сечения, к которой присоединен торс и к каждой из четырех сторон которой прикреплены подвижные части четырех телескопических шариковых направляющих, неподвижные части которых закреплены на двух несущих уголках, прикрепленных к основанию, при этом на винт и ось двигателя насажены шкивы, соединенные ремнем, а труба прямоугольного сечения и несущие уголки расположена коллинеарно с винтом.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| CN 101612730 B, 04.05.2011 | |||
| VolksBot Omni: A Holonomic Robot Base Using only Robotis Dynamixel Servos, August 1, 2010 by Travis Deyle | |||
| РОБОТ-МАНИПУЛЯТОР ДЛЯ ПОКРАСКИ ИЗДЕЛИЙ | 2003 |
|
RU2263020C2 |

