Область техники, к которой относится изобретение
Изобретение относится к области робототехники и может быть использовано при построении человекообразных роботов.
Уровень техники
Существует большое разнообразие кистей руки робота http://mindtrans.narod.ru/hands/hands.htm, изготавливаемых серийно для рынка робототехники или в исследовательских целях. Общий их принцип построения состоит в следующем. Кисть руки делают человекоподобной, с подвижными суставами пальцев. Суставы приводят в движение электрическими, пневматическими или гидравлическими актуаторами, используя зубчатые, ременные, фрикционные или тросовые передачи. Основная проблема построения кисти руки состоит в ее сложности при жестком ограничении на размер и, как следствие, в высокой стоимости, что не позволяет создать робота, пригодного для потребительского рынка.
Известна кисть руки (патент US 20130104686 A1), содержащая блок гидроцилиндров и трубок, подводящих к ним жидкость. Усилие от гидроцилиндров передается на механизмы, приводящие в движение фаланги пальцев робота. Недостатком этой конструкции является сложность, которую видно из чертежей указанного патента, а также из цены робота, которая превышает один миллион долларов (http://ru.wikipedia.org/wiki/ASIMO).
Известна также кисть руки робота (патент US 20100011899 A1), содержащая набор шкивов и тросовых передач, приводимых в движение электрическими двигателями. Недостатками этого устройства является возможность соскальзывания троса со шкива и общая сложность конструкции.
Известна также кисть руки робота (патент ЕР 2431139 A1), в которой движение пальцам передается с помощью системы зубчатых передач. Недостатком этой конструкции является высокая сложность, связанная с необходимостью выдерживать малые допуски на зазоры в зубчатых передачах и их креплениях.
Наиболее близким к предлагаемому устройству является система управления движением пальцев, защищенная патентом США US 20110071678 A1 "Tendon driven finger actuation system" и состоящая из двигателя, соединенного с редуктором, редуктора, линейного актуатора, соединенного с первым концом сухожилия, расположенного внутри направляющей трубки. Сухожилие вторым концом соединено с подвижной гайкой линейного актуатора. Линейный актуатор представляет собой винт с круглой гайкой, которая защищена от проворачивания с помощью штифта, который прикреплен к винту и расположен внутри щели, выполненной в корпусе линейного актуатора. Винт закреплен в корпусе с помощью двух подшипников и соединяется с редуктором с помощью муфты. При вращении двигателя вращается винт, а гайка движется поступательно и остается неподвижной в направлении вращения двигателя, передавая движение прикрепленному к ней сухожилию. Сухожилие передает движение суставам пальца. Для управления движением всех пальцев описанные части устройства располагаются по полукругу.
Недостатком этого устройства является сложность, а именно большое количество отдельно изготавливаемых деталей в конструкции руки робота.
Сущность изобретения
Техническим результатом предлагаемого изобретения является уменьшение количества деталей в устройстве.
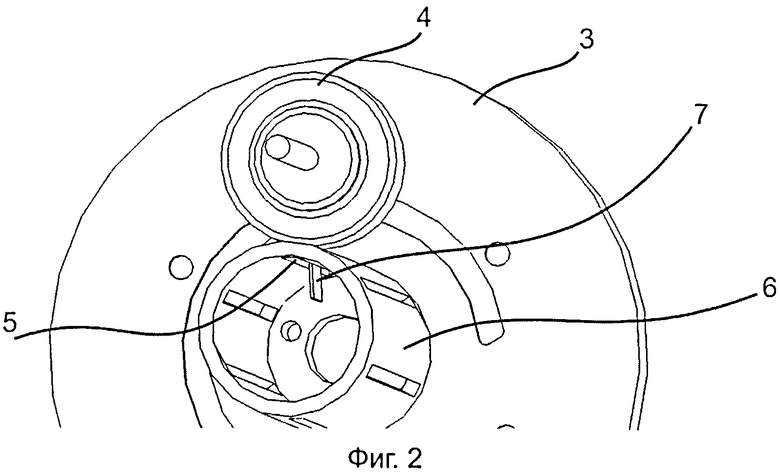
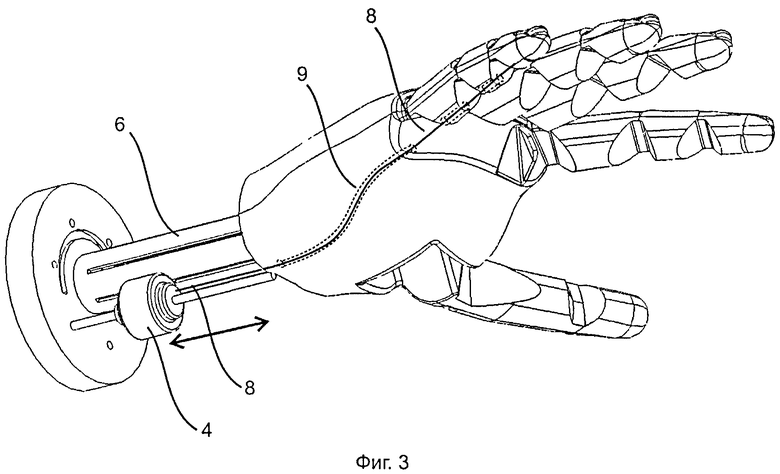
Технический результат достигается тем, что в предлагаемом устройстве подвижной деталью является не гайка, движущаяся линейно вдоль винта, который вращается неподвижно закрепленным двигателем, (как это сделано в устройстве прототипа), а сам двигатель. Для реализации этой идеи использован стандартный шаговый двигатель с ротором, выполненным в виде гайки (на рисунках ротор не показан), в которую вставлен винт. В предлагаемой конструкции (фиг. 1) винт 1 жестко закреплен в двух дисках 2 и 3, а на двигателе 4 закреплена радиально расположенная пластина 7 (фиг. 2), которая предотвращает шаговый двигатель 4 от проворачивания вокруг своей оси, перемещаясь в пазу 5, сделанном в трубе 6, жестко соединяющей диски 2 и 3 на фиг. 1. Поэтому при вращении ротора двигатель движется вдоль винта. Сухожилие 8 (фиг. 3) прикрепляется непосредственно к корпусу двигателя 4 и помещается в направляющую трубку 9 (показана пунктиром на фиг. 3), которая задает направление передачи усилия. Количество двигателей 4 (фиг. 1) зависит от требуемого количества степеней свободы руки.
Идея жесткого закрепления винта при подвижном двигателе и вращающейся гайке позволила исключить из конструкции прототипа редуктор, муфту, подшипник, корпус линейного актуатора и упростить способ крепления винта. Винт 1 (фиг 1) закрепляется неподвижно в двух дисках 2 и 3, которые являются общими для всех двигателей руки, что также упрощает конструкцию.
Перечень фигур и иных материалов
Фиг. 1 - общий вид кисти руки робота. Здесь 1 - винт; 2 и 3 - диски; 4 - двигатель, 6 - труба.
Фиг. 2 - иллюстрация способа предотвращения проворачивания двигателя вокруг своей оси. Здесь 3 - диск, 4 - двигатель; 5 - паз в трубе; 6 - труба; 7 - пластина.
Фиг. 3 - иллюстрация процесса передачи усилия к суставам пальца. Здесь 4 - двигатель; 6 - труба; 8 - сухожилие; 9 - направляющая трубка.
Сведения, подтверждающие возможность осуществления изобретения
Осуществляется изобретение в точном соответствии с описанием в разделе "Сущность изобретения". Винты 1 закрепляются в дисках 2 и 3 (фиг.1) с помощью крепежных винтов, вкрученных по резьбе, нарезанной в дисках 2 и 3. Оси отверстий для резьбы располагаются на дисках радиально. Труба 6 выполняет функцию соединения дисков 2 и 3 и одновременно служит для прокладки в ней проводов питания двигателей. Провода от двигателей выполнены в форме спирали (пружины), которая охватывает винт 1 и при движении двигателя 4 вдоль винта 1 сжимается или растягивается, как пружина. Рука выполнена из мягкой силиконовой резины. Трубка 9 вставляется внутрь руки во время заливки пресс-формы силиконовой резиной.
Типовое количество двигателей в руке - шесть, но в общем случае может быть произвольным. Их количество соответствует необходимому числу степеней свободы пальцев руки.
Двигатели в реализованном нами прототипе расположены по кругу, что обеспечивает максимальную плотность компоновки устройства.
В качестве двигателей с ротором в виде гайки использованы широко представленные на рынке шаговые двигатели с постоянными магнитами (см., например, двигатель 25BYZB03 (http://stepmotor.ru/25byz/)).
Работа руки происходит следующим образом. В исходном состоянии пальцы руки выпрямлены и удерживаются в этом состоянии силой упругости силиконовой резины, из которой вылита кисть руки. При поступлении напряжения на соответствующий двигатель (например, двигатель 4 на фиг. 1), его ротор начинает вращаться и накручиваться на винт 1. При этом соответствующий двигатель начинает двигаться вдоль винта 1, натягивая (или ослабляя) сухожилие 8 (фиг. 3), прикрепленное к этому двигателю. При натяжении сухожилия палец робота сгибается, при ослаблении - разгибается за счет силы упругости силиконовой резины. Направляющая трубка 9 задает направление силы натяжения сухожилия, требуемое для эффективного управления движением пальца.
Конструкция реализованного нами прототипа кисти руки робота чрезвычайно проста и ее себестоимость получается примерно в 10 раз ниже, чем у прототипа или аналогов.
По мнению автора, сущность заявляемого изобретения не следует для специалиста явным образом из известного уровня техники, поскольку прямое решение задачи, широко используемое в линейных актуаторах (см., например, http://fam-drive.ru/linak/actuators), состоит в том, что неподвижным является двигатель, вращающий винт, на котором находится перемещающаяся вдоль винта гайка, которая не вращается. В предлагаемом же решении подвижной деталью является сам двигатель, гайка вращается и неподвижна в направлении вдоль винта.
Видеоклип, подтверждающий возможность осуществления изобретения, выложен на youtube по адресу http://www.youtube.com/watch?v=RiBAcQcEh9s.
Конструкция руки очень технологична и в настоящий момент готовится технологическая оснастка для ее серийного производства.
Изобретение относится к области робототехники и может быть использовано при разработке человекоподобных роботов. Кисть руки робота, выполненная в виде упрощенной конструкции, содержит пальцы, двигатели, сухожилия, размещенные внутри направляющих трубок и закрепленные к подвижному корпусу двигателей, винты, два диска, соединенные между собой трубой с пазами и между которыми жестко закреплен каждый из винтов. При этом к корпусам двигателей жестко прикреплены радиально расположенные пластины, выполненные с возможностью движения в упомянутых пазах и предотвращающие проворачивание двигателей вокруг своей оси. Ротор каждого из двигателей выполнен в виде вращающейся гайки, накручивающейся на соответствующий ей винт, задающий направление перемещения по нему двигателя. 3 ил.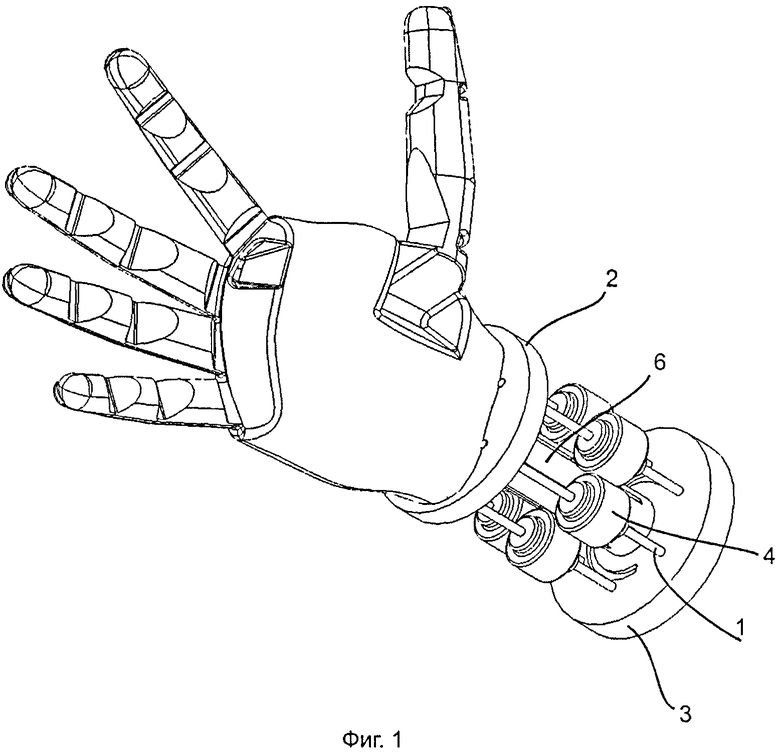
Кисть руки робота, содержащая пальцы, двигатели, сухожилия, размещенные внутри направляющих трубок, и винты, отличающаяся тем, что она снабжена двумя дисками, соединенными между собой трубой с пазами и между которыми жестко закреплен каждый из винтов, при этом к корпусам двигателей жестко прикреплены радиально расположенные пластины, выполненные с возможностью движения в упомянутых пазах и предотвращающие проворачивание двигателей вокруг своей оси, а ротор каждого из двигателей выполнен в виде вращающейся гайки, накручивающейся на соответствующий ей винт, задающий направление перемещения по нему двигателя, при этом сухожилия закреплены к подвижному корпусу двигателей.
| US 20110071678 A1, 24.03.2011 | |||
| Коррозионностойкое футеровочное покрытие для металлических тиглей | 1958 |
|
SU117107A1 |
| Карусельный станок для формования вибрированием железобетонных изделий | 1938 |
|
SU60891A1 |
| US 7296835 B2, 20.11.2007 | |||
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ СОСУДОВ, РАБОТАЮЩИХ ПОД ДАВЛЕНИЕМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431139C1 |

