Изобретение относится к астроинерциальным навигационным системам, в которых основная навигационная информация (счисляемые координаты и курс) корректируется по сигналам, поступаемым с выхода астровизирующего устройства.
Известна астроинерциальная система, описанная в RU 2442108 С1, 10.02.2012, состоящая из астровизира (телеблока), управляемого следящими системами, обеспечивающими его нацеливание в расчетную точку по целеуказаниям, выдаваемым из бортовой центральной вычислительной машины, выход которого подключен к последовательно соединенным аналогово-цифровому преобразователю, блоку формирования астропоправок, представляющих разности между расчетными и фактическими координатами визируемой звезды, и блоку формирования осредненного значения астропоправок. Недостатком данной системы является то, что в отдельных случаях, в отличие от штатного случая поступления выходных сигналов имеют место сбои (ложные сигналы) в формировании выходных сигналов, являющиеся следствием внешних факторов при визировании звезды. Таким образом, измерения содержат ошибку, порождаемую этими сбоями.
Задачей предлагаемого изобретения является повышение точности получаемых измерений путем предварительной отбраковки указанных сбоев, с достижением такого технического результата, как повышение точности определения фактических координат звезды системой астровизирования.
Заявленный технический результат достигается системой астровизирования, состоящей из астровизора, управляемого следящими системами, обеспечивающими его нацеливание в расчетную точку по целеуказаниям, выдаваемым из бортовой центральной вычислительной машины (ЦВМ), выход которого подключен к аналогово-цифровому преобразователю (АЦП), выход которого подключен к блоку формирования астропоправок, представляющих разности между расчетными и фактическими координатами визируемой звезды, выход которого подключен к блоку отбраковки ложных астропоправок, состоящему из последовательно соединенных буфера выходных сигналов блока формирования астропоправок, двух счетчиков, обеспечивающих выборку сигналов из буфера, разностной системы и системы сравнения, формирующую порог, по которому производится отбраковка сбойных сигналов, выход которого подключается к входу блока формирования осредненного значения астропоправок, при этом блок формирования осредненного значения астропоправок выполнен с возможностью сравнения, обеспечивающего отбраковку сбойных астропоправок по порогу, сформированному в блоке отбраковки ложных астропоправок.
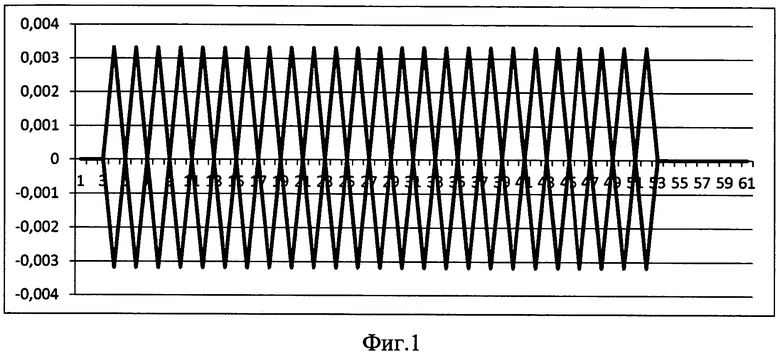
Фиг. 1 - график, отражающий штатный случай поступления выходных сигналов в виде угловых поправок ΔAi, ΔВi по азимуту и высоте в процессе визирования звезды.
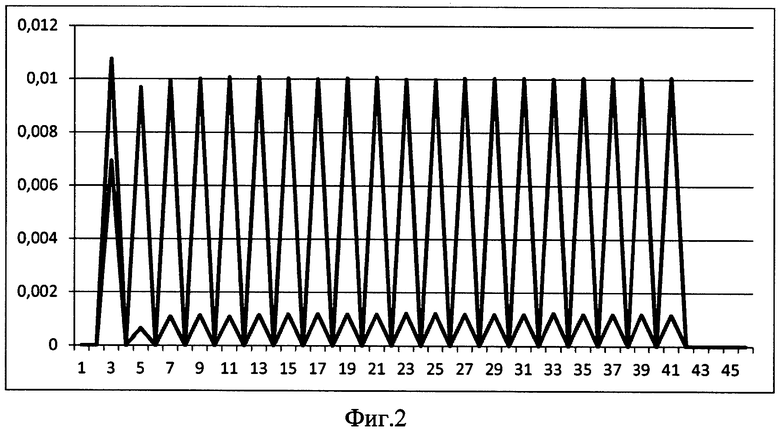
Фиг. 2 - график, отражающий сбои (ложные сигналы) при формировании выходных сигналов в виде угловых поправок ΔАi, ΔВi по азимуту и высоте, вызванные внешними факторами при визировании звезды.
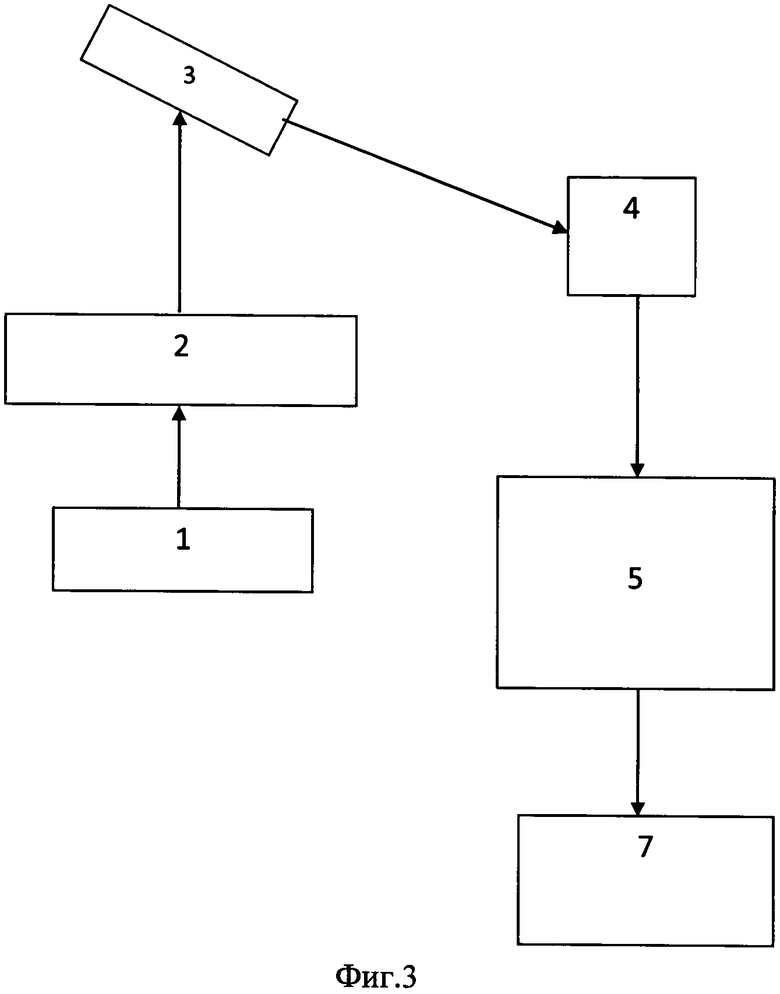
Фиг. 3 - известная система астровизирования.
Фиг. 4 - заявляемая система астровизирования.
Известная система астрововизирования, представленная на фиг. 3, состоит из астровизора (телеблока) 3, управляемого следящими системами 2, обеспечивающими его наведение в заданную точку по целеуказаниям, формируемым в бортовой ЦВМ 1, выход которого подключен к последовательно соединенным аналогово-цифровому преобразователю (АЦП) 4, блоку формирования астропоправок 5, представляющих разности между расчетными и фактическими координатами визируемой звезды, и блоку осреднения астропоправок 7.
Известная система астровизирования, график выходных сигналов при работе которой отражает фиг. 1, работает следующим образом.
Выходные сигналы астровизирующего устройства, формируемые в процессе визирования выбранной звезды, преобразуются в цифровой код в блоке преобразования аналогового сигнала (АЦП) 4, который поступает в блок формирования астропоправок 5, выходом которого является упорядоченная последовательность цифровых сигналов, каждый из которых представляет разность меду угловыми координатами визируемой звезды и их расчетными значениями.
Для формирования измерения dA, dB в блоке осреднения астропоправок 7 проводится осреднение выходных сигналов:

где N - число выходных сигналов.
Осредненное значение dB считается аналогично.
Однако в отдельных случаях, в отличие от штатного случая поступления выходных сигналов, представленного на фиг. 1, имеют место сбои в формировании выходных сигналов, как это представлено на фиг. 2. При этом такого рода сбои (ложные сигналы) не связаны с какими-либо аппаратурными сбоями, а являются следствием внешних факторов при визировании звезды. Естественно, что при наличии такого рода сбоев измерение, определяемое по (1), будет содержать ошибку, порождаемую этими сбоями.
Для исключения сбоев (ложных сигналов), вызванных внешними факторами при визировании звезды, в систему необходимо ввести блок, позволяющий отсеивать (отбраковывать) такие сбои (ложные сигналы), т.е. блок отбраковки ложных астропоправок 6.
Для достижения заявленного технического результата блок отбраковки ложных астропоправок 6 вводят в систему между блоком формирования астропоправок 5 и блоком осреднения 7 (фиг. 4).
Блок отбраковки ложных астропоправок 6 состоит из последовательно соединенных накопителя сигналов, поступающих с выхода блока формирования астропоправок, двух счетчиков, идентифицирующих номера сравниваемых сигналов, разностной системы и системы сравнения полученной разности с некоторой фиксированной константой L, величина которой определяется точностными характеристиками системы. При этом блок осреднения 7 необходимо выполнить с возможностью сравнения, обеспечивающего выборку неотбракованных сигналов по условию (4).
Блок отбраковки ложных астропоправок 6 работает следующим образом.
Пакет выходных сигналов ΔА, получаемый при визировании выбранной звезды, содержит N выходных сигналов. Для достижения заявленного технического результата вычисляются абсолютные величины разностей:

где i, j=1, 2, …; N - номер выходного сигнала.
Очевидно, что количество таких функций будет равно числу сочетаний 
Процедура отбраковки заканчивается, когда в числе неотбракованных выходных сигналов останется один, в случае, если начальное число N сигналов нечетное, поскольку в каждом цикле отбраковки отбраковываются по два сигнала, либо два, в случае, если начальное число выходных сигналов четное. По окончании отбраковки формируется константа L, равная либо последнему неотбракованному сигналу либо среднему арифметическому двух последних неотбракованных сигналов, и далее вычисляется осредненное значение:

где М - число всех выходных сигналов, удовлетворяющих условию:
где Lp - некоторый заданный порог, величина которого определяется точностными характеристиками устройства астровизирования.
Астропоправки в виде цифрового кода, поступающие с выхода формирования астропоправок, запоминаются в регистрах накопителя сигналов М(к), в соответствующем регистре буфера логических значений МА(к) формируется значение МА(к)=True и счетчик к увеличивается на единицу. При достижении значения к=N, где N - число астропоправок, содержащееся в пачке, передаваемой из блока формирования астропоправок, управление передается на блок формирования порога L.
Исходное значение счетчика к=0; буфера логических значений - MA(i)=False.
Начальное значение счетчика N задается равным числу астропоправок, содержащихся в регистрах накопителя сигналов М(к). Счетчики i и j, меняющиеся как i=1, 2, …; N, j=i+1, i+2, …, N, определяют номера регистров накопителя, в которых хранятся сигналы для вычисления:

Величина ΔM вычисляется только для i-х и j-х астропоправок при условии, что в i-й и j-й ячейках буфера логических значений МА установлено значение True. Вычисленная величина ΔM сравнивается в системе сравнения в величиной Am (исходное значение Am=0), и при ΔМ>Am значение ΔМ заносится в Am, а значения счетчиков I, j запоминаются в I′, j′. Таким образом, после просмотра всех пар регистров накопителя (i=N) в ячейках I′, j′ будут содержаться номера регистров накопителя, для которых разность ΔM максимальна. В ячейки I′, j′ регистра МА заносится значение False, счетчик N уменьшается на два, Am зануляется и операция вычисления ΔM по описанной выше системе повторяется до тех пор, пока значение счетчика N не станет меньше трех, т.е. из числа просматриваемых измерений не останется два или одно, после чего вычисляется L по следующей системе:
Просматриваются ячейки логического буфера AM и вычисляется L как значение М(r) одного оставшегося регистра накопителя для которого МА(r)=True, либо как среднее арифметическое двух значений регистров М(r) и M(s), для которых MA(r)=True и MA(s)=True, и управление передается на выполнение блока осреднения, система которого представлена на фиг. 7. В блоке осреднения получается:

вычисляется среднее арифметическое всех астроизмерений, удовлетворяющих условию:

где Lp - некоторый фиксированный порог, величина которого определяется точностными характеристиками астровизира.
Покажем, что осреднение по (6) полностью эквивалентно (1).
Доказательство проводим по индукции.
Обозначим:

- среднее арифметическое М слагаемых.
Тогда по определению:

- среднее арифметическое М+1 слагаемых.
Выделив последнее слагаемое в правой части (9), представим (9) как:

Умножим и разделим первое слагаемое в правой части (10) на М. Тогда с учетом (8) получим:

Прибавив и отняв в первом слагаемом правой части (11) единицу, получим:

т.е. получили (6).
Исходное значение переменной dAm
dA0=0.
При поступлении первого сигнала ΔA1 по (6) получаем:
dA1=dA0+(ΔA1-dA0)/1=ΔA1
При поступлении второго измерения ΔA2 получаем по (6):
dA2=dA1+(ΔA2-dA1)/2=(ΔA2+ΔA1)/2
и так далее, что и доказывает эквивалентность (1) и (6).
Таким образом, в системе астровизирования отсекаются ложные сигналы, вызванные внешними факторами при визировании звезды, что позволяет повысить точность определения фактических координат звезды системой астровизирования, а соответственно позволяет более точно определить местонахождение летательного аппарата.
Изобретение реализуемо в высокоточных астроинерциальных навигационных системах летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ВЫХОДНОЙ ИНФОРМАЦИИ АСТРОВИЗИРУЮЩЕГО УСТРОЙСТВА | 2014 |
|
RU2566381C1 |
| СПОСОБ АСТРОВИЗИРОВАНИЯ | 2015 |
|
RU2586443C1 |
| СИСТЕМА АСТРОВИЗИРОВАНИЯ | 2015 |
|
RU2582309C1 |
| СИСТЕМА АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2016 |
|
RU2639583C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ АСТРОКОРРЕКЦИИ | 2016 |
|
RU2641619C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
Изобретение относится к области приборостроения и может найти применение в астроинерциальных навигационных системах, в которых основная навигационная информация корректируется по сигналам, поступающим с выхода астровизирующего устройства. Технический результат - повышение надежности. Для этого блок формирования астропоправок подключен к блоку отбраковки ложных астропоправок, состоящему из последовательно соединенных буфера выходных сигналов блока формирования астропоправок, двух счетчиков, обеспечивающих выборку сигналов из буфера, разностной системы и системы сравнения, формирующую порог, по которому производится отбраковка сбойных сигналов, выход которого подключается к входу блока формирования осредненного значения астропоправок. При этом блок формирования осредненного значения астропоправок выполнен с возможностью сравнения, обеспечивающего отбраковку сбойных астропоправок по порогу, сформированному в блоке отбраковки ложных астропоправок. 4 ил.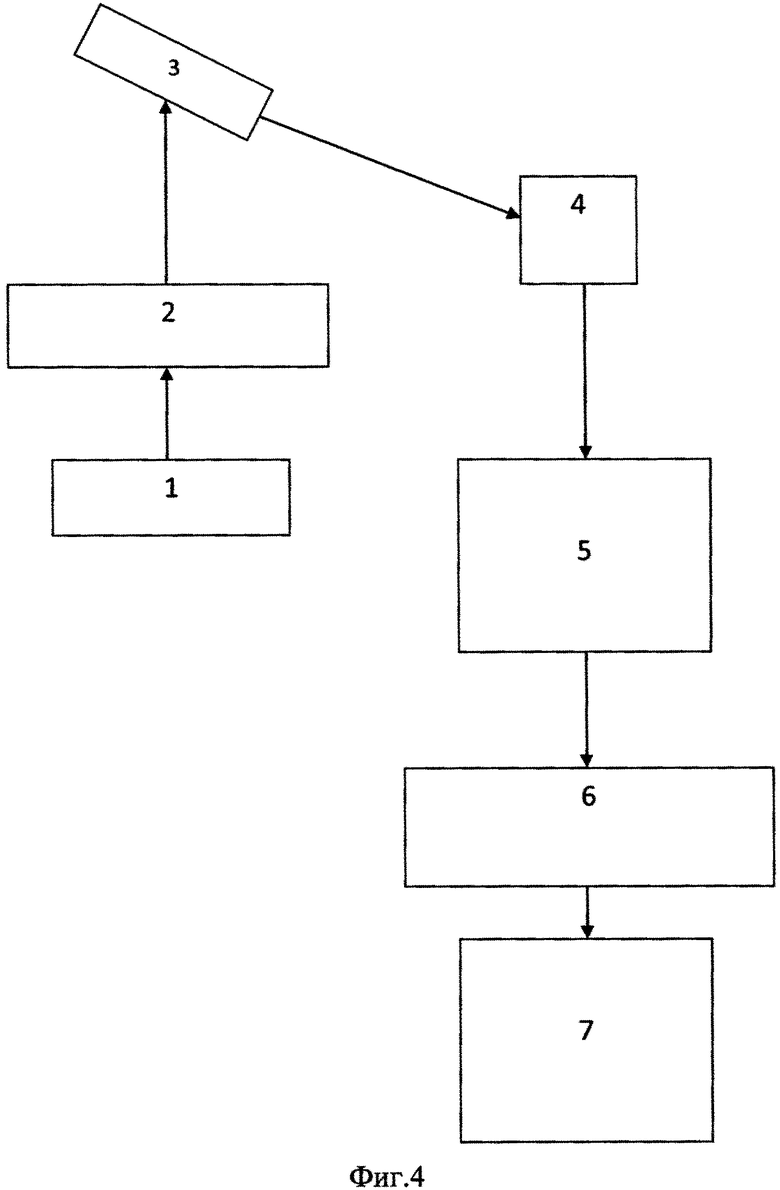
Система астровизирования, состоящая из астровизора, управляемого следящими системами, обеспечивающими его нацеливание в расчетную точку по целеуказаниям, выдаваемым из бортовой центральной вычислительной машины (ЦВМ), выход которого подключен к аналогово-цифровому преобразователю (АЦП), выход которого подключен к блоку формирования астропоправок, представляющих разности между расчетными и фактическими координатами визируемой звезды, выход которого подключен к блоку отбраковки ложных астропоправок, состоящему из последовательно соединенных буфера выходных сигналов блока формирования астропоправок, двух счетчиков, обеспечивающих выборку сигналов из буфера, разностной системы и системы сравнения, формирующую порог, по которому производится отбраковка сбойных сигналов, выход которого подключается к входу блока формирования осредненного значения астропоправок, при этом блок формирования осредненного значения астропоправок выполнен с возможностью сравнения, обеспечивающего отбраковку сбойных астропоправок по порогу, сформированному в блоке отбраковки ложных астропоправок.
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2378616C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ | 1990 |
|
RU2120108C1 |
| US 5396326 A1, 07.03.1995 | |||
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКИХ ГЕПАТИТОВ | 1998 |
|
RU2175237C2 |

