Изобретение относится к области приборостроения, в частности к высокоточным астроинерциальным системам для применения в составе пилотируемых авиационно-космических объектов и беспилотных летательных аппаратов.
Известны способы первичной обработки информации астровизирующего устройства, применяемые в устройствах астроинерциальной навигации, описанных в RU 2442108 C1, 10.02.2012 или RU 2012123083 A, 10.12.2013, в которых первичная обработка информации астровизирующего устройства представляет фиксированную последовательность цифровых сигналов, формируемых при визировании выбранной звезды, каждый из которых представляет разность между фактическими угловыми координатами этой звезды и их расчетными значениями, заключающаяся в осреднении полученной информации путем суммирования всех полученных выходных сигналов с последующим делением полученной суммы на количество этих полученных сигналов. Однако в отдельных случаях, в отличие от штатного случая поступления выходных сигналов, имеют место сбои (дефектные сигналы) в формировании выходных сигналов. При этом, такого рода сбои не связаны с какими-либо аппаратурными сбоями, а являются следствием внешних факторов при визировании звезды. Естественно, что при наличии такого рода сбоев измерения будут содержать ошибку, порождаемую этими сбоями.
Задачей предлагаемого изобретения является повышение точности получаемых измерений путем предварительной отбраковки указанных сбоев с достижением такого технического результата, как повышение точности формирования выходных сигналов с соответствующим повышением точности определения фактических координат звезды.
Заявленный технический результат достигается способом первичной обработки выходной информации астровизирующего устройства, представляющей фиксированную последовательность цифровых сигналов, формируемых при визировании выбранной звезды, каждый из которых представляет разность между фактическими угловыми координатами этой звезды и их расчетными значениями, заключающийся в отбраковке дефектных сигналов путем вычисления абсолютной разности всех пар сигналов из общего числа полученных сигналов, определения пары, составляющей максимальное значение полученной абсолютной величины разности, и исключения ее из последующего рассмотрения, и повторения отбраковки оставшихся сигналов вплоть до того, как не исключенными из рассмотрения останутся один, в случае четного начального числа обрабатываемых сигналов, либо два, в случае нечетного начального числа обрабатываемых сигналов, после чего формируется константа, равная значению оставшегося сигнала, либо среднему арифметическому двух оставшихся в рассмотрении сигналов, а в качестве измерения формируется осредненное значение как сумма сигналов, абсолютная величина разности которых и сформированной в процессе отбраковки константы не превышает заданного порога, величина которого определяется точностными характеристиками астровизирующего устройства и делением полученной суммы на число сигналов, удовлетворяющих этому условию, с дальнейшим осреднением полученной информации путем суммирования всех полученных выходных сигналов с последующим делением полученной суммы на количество этих полученных сигналов.
Изобретение поясняется фиг. 1 и фиг. 2.
Фиг. 1 - штатный случай поступления выходных сигналов в процессе визирования звезды.
Фиг. 2 - сбои (дефектные сигналы) при формировании выходных сигналов. Осуществляют способ следующим образом.
Первичная обработка выходной информации астровизирующего устройства представляет фиксированную последовательность цифровых сигналов, формируемых при визировании выбранной звезды, каждый из которых представляет разность между фактическими угловыми координатами этой звезды и их расчетными значениями, заключающаяся в осреднении полученной информации путем суммирования всех полученных выходных сигналов с последующим делением полученной суммы на количество этих полученных сигналов, что и отражено на фиг. 1 - группа выходных сигналов в виде угловых поправок ΔАi, ΔВi по азимуту и высоте, поступающая в процессе визирования звезды.
Для формирования измерения dA, dB проводится осреднение выходных сигналов

где N - число выходных сигналов, представленное на фиг. 1. При этом, осредненное значение dB вычисляется аналогично.
Однако, как указывалось выше, в отдельных случаях, в отличие от штатного случая поступления выходных сигналов, представленного на фиг. 1, имеют место сбои (дефектные сигналы) при формировании выходных сигналов, как это представлено фиг. 2. При этом, такого рода сбои не связаны с какими-либо аппаратурными сбоями, а являются следствием внешних факторов при визировании звезды. Естественно, что при наличии такого рода сбоев измерение, определяемое по (1), будет содержать ошибку, порождаемую этими сбоями.
Таким образом, для исключения ошибок в формировании выходного сигнала, перед операцией осреднения, из общего числа полученных сигналов проводится отбраковка дефектных сигналов путем вычисления абсолютной разности всех пар сигналов из общего числа полученных сигналов, определения пары, составляющей максимальное значение полученной абсолютной величины разности, и исключения ее из последующего рассмотрения, и повторения отбраковки оставшихся сигналов вплоть до того, когда не исключенными из рассмотрения останутся один, в случае четного начального числа обрабатываемых сигналов, либо два, в случае нечетного начального числа обрабатываемых сигналов, после чего формируется константа, равная значению оставшегося сигнала, либо среднему арифметическому двух оставшихся в рассмотрении сигналов, а в качестве измерения формируется осредненное значение как сумма сигналов, абсолютная величина разности которых и сформированной в процессе отбраковки константы не превышает заданного порога, величина которого определяется точностными характеристиками астровизирующего устройства и делением полученной суммы на число сигналов, удовлетворяющих этому условию.
Например, пусть пакет выходных сигналов ΔА, получаемый при визировании выбранной звезды, содержит N выходных сигналов.

где i, j=1, 2, …; N - номер выходного сигнала.
Очевидно, что количество таких функций будет равно числу сочетаний 
Процедура отбраковки заканчивается тогда, когда в числе неотбракованных выходных сигналов останется один, если начальное число N сигналов нечетное, поскольку в каждом цикле отбраковки отбраковываются по два сигнала, либо два, если начальное число выходных сигналов четное. По окончании отбраковки формируется константа V, равная либо последнему неотбракованному сигналу, либо среднему арифметическому двух последних неотбракованных сигналов и далее вычисляется осредненное значение

где М - число всех выходных сигналов, удовлетворяющих условию

где L - некоторый заданный порог, величина которого определяется точностными характеристиками устройства астровизирования.
Таким образом, при определении измерения по (4), где константа V определяется по описанной выше системе отбраковки отсекаются дефектные измерения, представленные на фиг. 2, что позволяет исключить из (4) ошибочные измерения, порождаемые сбоями, являющимися следствием внешних факторов при визировании звезды.
Изобретение реализуемо в высокоточных астроинерциальных навигационных системах летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АСТРОВИЗИРОВАНИЯ | 2014 |
|
RU2566380C1 |
| СПОСОБ АСТРОКОРРЕКЦИИ | 2016 |
|
RU2641619C1 |
| СПОСОБ АСТРОВИЗИРОВАНИЯ | 2015 |
|
RU2586443C1 |
| СИСТЕМА АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2016 |
|
RU2639583C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| СИСТЕМА АСТРОВИЗИРОВАНИЯ | 2015 |
|
RU2582309C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |

Изобретение относится к области приборостроения и может найти применение в высокоточных астроинерциальных системах пилотируемых авиационно-космических объектов. Технический результат - повышение точности. Для этого осуществляют отбраковку дефектных сигналов. При этом формируют пары сигналов, составляющие максимальное значение полученной абсолютной величины разности, и исключают ее из последующего рассмотрения. Повторяют отбраковку оставшихся сигналов вплоть до того, как не исключенными из рассмотрения останется один сигнал, в случае нечетного начального числа обрабатываемых сигналов, либо два сигнала, в случае четного начального числа обрабатываемых сигналов. Формируется константа, равная значению оставшегося сигнала, либо среднему арифметическому двух оставшихся в рассмотрении сигналов, а в качестве измерения формируется осредненное значение как сумма сигналов, абсолютная величина разности которых и сформированной в процессе отбраковки константы не превышает заданного порога, величина которого определяется точностными характеристиками астровизирующего устройства и делением полученной суммы на число сигналов, удовлетворяющих этому условию. 2 ил.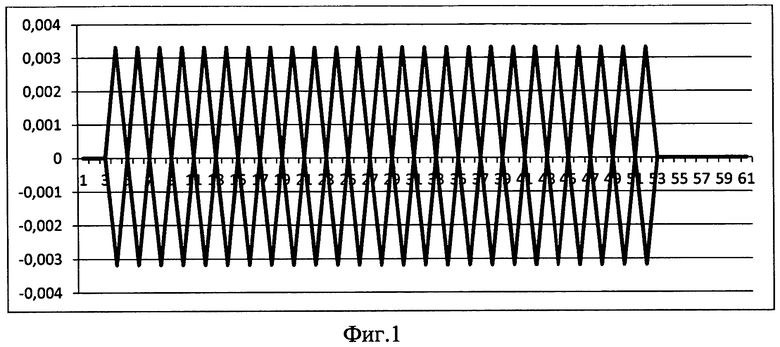
Способ первичной обработки выходной информации астровизирующего устройства, представляющей фиксированную последовательность цифровых сигналов, формируемых при визировании выбранной звезды, каждый из которых представляет разность между фактическими угловыми координатами этой звезды и их расчетными значениями, заключающийся в отбраковке дефектных сигналов путем вычисления абсолютной разности всех пар сигналов из общего числа полученных сигналов, определения пары, составляющей максимальное значение полученной абсолютной величины разности, и исключения ее из последующего рассмотрения, и повторения отбраковки оставшихся сигналов вплоть до того, как не исключенными из рассмотрения останутся один, в случае нечетного начального числа обрабатываемых сигналов, либо два, в случае четного начального числа обрабатываемых сигналов, после чего формируется константа, равная значению оставшегося сигнала, либо среднему арифметическому двух оставшихся в рассмотрении сигналов, а в качестве измерения формируется осредненное значение как сумма сигналов, абсолютная величина разности которых и сформированной в процессе отбраковки константы не превышает заданного порога, величина которого определяется точностными характеристиками астровизирующего устройства и делением полученной суммы на число сигналов, удовлетворяющих этому условию.
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2378616C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ | 1990 |
|
RU2120108C1 |
| US 5396326 A1, 07.03.1995 | |||
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКИХ ГЕПАТИТОВ | 1998 |
|
RU2175237C2 |

