Предлагаемое изобретение относится к области геологоразведки и может быть использовано при поисковом или эксплуатационном бурении скважин.
В области геологической разведки нефтегазовых пластов и поиска месторождений полезных ископаемых используется технология бурения скважин, при которой с помощью скважинной измерительной аппаратуры получают геофизическую, технологическую и навигационную информацию, которая доставляется на поверхность Земли непосредственно путем периодически проводимых операций остановки процесса бурения и подъема бурильной колонны с носителями информации или передается на поверхность Земли дистанционно по каналам телеметрической связи.
Известны устройства измерительной аппаратуры, располагаемой непосредственно на снаряде в составе буровой колонны и обеспечивающей автономный сбор геофизической, технологической и навигационной информации в буровой скважине в процессе бурения и извлекаемой периодически на поверхность Земли для обработки полученной информации в режиме offline (при камеральной обработке) с целью решения задач каротажа, позиционирования снаряда, оценки и прогноза траектории его движения. (Молчанов А.А. Измерение геофизических и технологических параметров в процессе бурения скважины. - М.: Недра, 1983). Однако такие устройства требуют больших материальных и временных затрат с привлечением большого контингента обслуживающего персонала.
Известны устройства измерительной аппаратуры, располагаемой непосредственно на снаряде, обеспечивающей автономный сбор необходимой информации и реализующей функции дистанционной передачи/приема накопленной информации на поверхность Земли через каналы (контактные или бесконтактные) телеметрической системы связи. (Молчанов А.А., Абрамов Г.С. Бескабельные системы для исследований нефтегазовых скважин (теория и практика). - М.: ОАО «ВНИИОЭНГ», 2003). Однако такие устройства с каналами связи обладают сравнительно низкими показателями отказоустойчивости, надежности и долговечности в эксплуатации.
Наиболее близким к предлагаемому изобретению является устройство на базе авиационного геолого-разведочного измерительно-вычислительного комплекса ЕМ-4Н (Россия), предназначенное для дистанционной аэромагниторазведки и имеющее два канала дистанционных измерений: электромагнитный канал каротажа пород и магнитный канал позиционирования гондолы (Гироскопия и навигация, - №1 (68), 2010 - с. 3-14). Причем канал дистанционного каротажа пород включает в свой состав излучающую антенну, установленную на летательном аппарате (носителе), и приемную антенну, расположенную в гондоле, буксируемой на тросе носителем. Канал дистанционного позиционирования гондолы относительно носителя состоит из индуктора (магнита или электромагнита), установленного на носителе, и трехкомпонентного блока магнитометров (ТБМ), размешенного в буксируемой гондоле. Для полномасштабного и корректного решения задачи позиционирования и ориентации гондолы с приемной антенной и магнитометрами относительно носителя используется дополнительная информация от бортовых измерителей, установленных на носителе и в гондоле (гировертикалей, GPS-приемников и др.).
Устройства аналогичного типа широко используются в практике дистанционной наземной, морской и воздушной магниторазведки (например, системы GEOTEM, MEGA-ТЕМ, TEMPEST, компания «FugroAirborne» (Канада), применяемые для проведения аэромагниторазведки и аэроэлектроразведки). Общим недостатком дистанционных устройств подобного типа является то, что они обеспечивают решение задачи позиционирования приемника относительно источника диполя в относительной связанной с носителем, а не в географической системе координат, а также то, что они не позволяют решать задачу ориентации в пространстве источника диполя без привлечения дополнительной информации.
К недостаткам устройств указанного типа следует также отнести то, что они не приспособлены к решению задач идентификации пород, позиционирования и ориентации снаряда в буровой скважине при проведении геологоразведочных буровых работ.
Задача настоящего изобретения заключается в устранении указанных недостатков устройства-прототипа путем разработки геолого-разведочного измерительно-вычислительного комплекса, позволяющего решать в полном объеме задачи каротажа пород, ориентации и позиционирования снаряда в буровой скважине.
Решение поставленной задачи достигается тем, что в дистанционное устройство, предназначенное для бесконтактного зондирования - каротажа пород и позиционирования снаряда в буровой скважине и состоящее из передающей антенны (АП) и индуктора (постоянного магнита или электромагнита), размещенных на снаряде и изолированных от буровых труб с помощью немагнитной вставки, и наземной измерительно-вычислительной системы, включающей в свой состав трехосные блоки магнитометров и приемные антенны (ПАН), размещенные в контрольных точках наблюдений (КТН) (не менее трех) на поверхности Земли с известными координатами и обеспечивающие измерения параметров электромагнитного поля (ЭМП) передающей антенны и параметров магнитного поля диполя (МПД) индуктора в контрольных точках наблюдений, и вычислители, связанные с трехосными блоками магнитометров и приемными антеннами через АЦП стандартного интерфейса, вводится измерительно-вычислительный канал ориентации снаряда в пространстве, состоящий из трехосных блоков магнитоградиентометров, устанавливаемых в тех же контрольных точках наблюдений на поверхности Земли, и дополнительного вычислителя, связанного через дополнительный аналого-цифровой преобразователь со всеми трехосными блоками магнитометров и трехосными блоками магнитоградиентометров.
Предлагаемое изобретение поясняется чертежами:
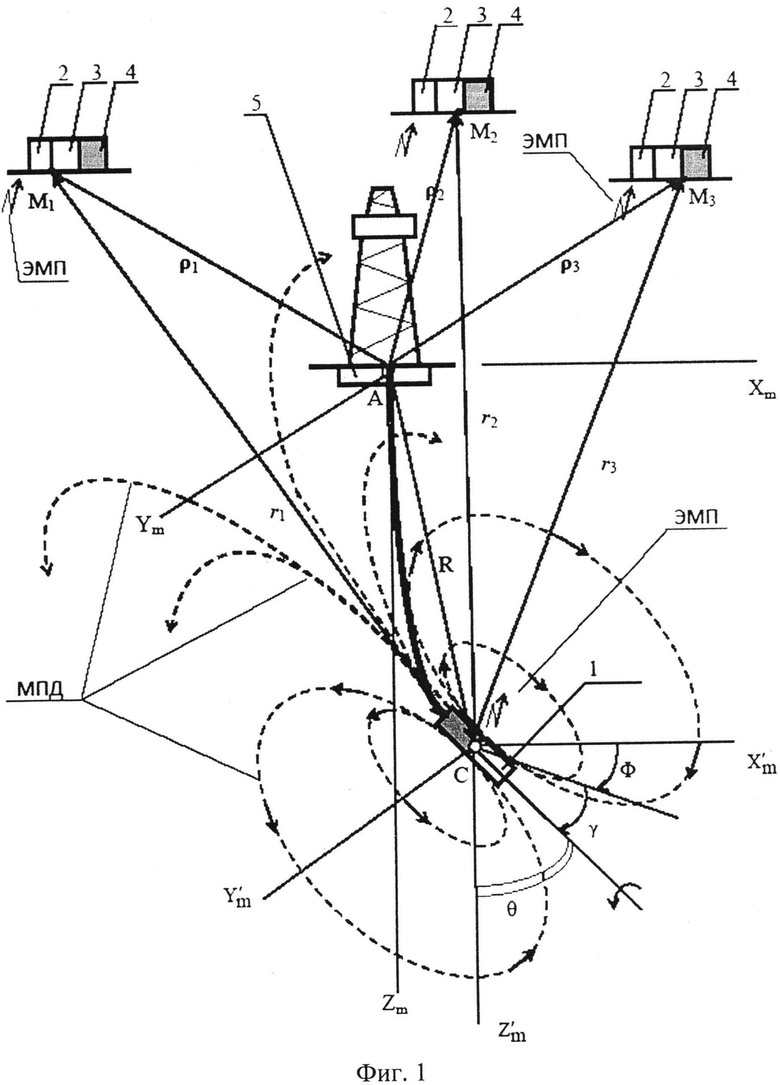
на фиг. 1 представлена схема получения многомерной магнитометрической информации в контрольных точках наблюдения (КТН);
на фиг. 2 представлена схема получения и обработки многомерной магнитометрической информации в геолого-разведочном измерительно-вычислительном комплексе (ГИВК) "Тантал".
На фиг. 1 приняты следующие обозначения:
1 - снаряд в буровой колонне,
2 - приемные антенны (ПАН),
3 - трехосные блоки магнитометров (ТБМ),
4 - трехосные блоки магнитоградиентометров (ТБГ),
5 - одометр (измеритель длины трубы),
На фиг. 2 приняты следующие обозначения:
1 - снаряд в буровой колонне,
2 - приемные антенны (ПАН),
3 - трехосные блоки магнитометров (ТБМ),
4 - трехосные блоки магнитоградиентометров (ТБГ),
5 - одометр (измеритель длины трубы),
6 - аналого-цифровой преобразователь АЦП стандартного интерфейса,
7 - вычислитель каротажа пород (ВКП),
8 - вычислитель позиционирования снаряда (ВПС),
9 - вычислитель ориентации снаряда (ВОС),
10 - антенна передающая (АП),
11 - индуктор снаряда (ИС).
Предлагаемое устройство представляет собой геолого-разведочный измерительно-вычислительный комплекс (ГИВК), состоящий из трех каналов (фиг. 2):
- канала каротажа пород,
- канала позиционирования снаряда,
- канала ориентации снаряда.
Канал каротажа пород организуется по схеме (Фиг. 2): (АП-ЭМП-ПАН(i)-АЦП-1-ВКП). Схема организации канала позиционирования снаряда: (ИС-МПД-ТБМ(i)-АЦП-2-ВПС). Вновь вводимый в ГИВК канал ориентации снаряда работает по схеме: (ИС-МПД-ТБГ(i)-АЦП-3-ВОС).
Следует отметить, что каждый измерительно-вычислительный канал оказывается в свою очередь многоканальным (по числу КТН). Для снижения потерь энергии электромагнитного излучения АП и магнитного поля индуктора ИС целесообразно передающую антенну и ИС устанавливать на снаряде таким образом, чтобы диаграмма направленности ЭМП была направлена по вертикали вверх, а МПД имело ось диполя, направленную по вертикали (или близко к ней).
Для исключения взаимодействия ЭМП и МПД, формируемых с помощью передающей антенны 10 и индуктора снаряда 11, с трубой в буровой скважине и возможного последующего искажения этих полей передающая антенна и индуктор размещаются на снаряде 1 так, что они оказываются изолированными от буровых труб с помощью немагнитной вставки (на Фиг. 1 и 2 не показана).
Устройство работает следующим образом.
На основе начальной информации (спутниковой или геодезической), получаемой при позиционировании контрольных точек наблюдений, с использованием одометрической информации (R) от одометра 5 обеспечивается начальная выставка измерительно-вычислительного комплекса (по алгоритму выставки), в частности, определяются радиусы-векторы 
Канал каротажа пород работает следующим образом. Антенна передающая 10 формирует электромагнитное поле (ЭМП), излучаемое вверх к поверхности Земли (Фиг. 2). Это поле пронизывает породы, лежащие между точкой C расположения снаряда 1 и КТН 


где ri - расстояния от АП до приемных антенн 
Δti - времена распространения ЭМВ от АП до 
Канал позиционирования снаряда в соответствии со схемой (ИС-МПД-ТБМ(i)-АЦП-2-ВПС) работает следующим образом. Индуктор 11 в виде магнита или электромагнита, установленный на снаряде 1, формирует вокруг себя магнитное поле диполя (МПД), ось которого близка к вертикальному положению (Фиг. 2). МПД, передающее дистанционно энергию от индуктора снаряда 1 к трехосным блокам 3 TBM(i) и 4 ТБГ(i), установленным на поверхности Земли в КТН 
В контрольных точках наблюдений Mi(xi; yi; zi) (


На основе обработки многомерной информации, полученной в КТН 

Решение системы уравнений (4) дает возможность определить координаты радиуса-вектора R в геомагнитной системе отсчета XmYmZm (Фиг. 1):

Следует отметить, что задача позиционирования снаряда в буровой скважине (т.е. задача определения координат радиуса вектора R) решается однозначно при проведении магнитных измерений в трех КТН (
Канал ориентации снаряда в соответствии со схемой (ИС-МПД-ТБГ(i)-АЦП-3-ВОС) работает следующим образом. На основе многомерной магнитометрической информации, полученной с помощью трехосных блоков 3 и 4 в КТН(i) 



Модуль магнитного момента диполя находится по алгоритму идентификации диполя способом усреднения:

На основе обработки полученной в КТН 

где Di - квадратная матрица (3×3), элементы которой зависят от координат векторов 
Ф,θ - азимутальный и зенитный углы ориентации снаряда. Алгоритм ориентации снаряда (АОС) реализуется в вычислителе 9 (Фиг. 2). При реализации АОС также может быть использован принцип структурно-функциональной избыточности информации.
Для проверки правильности определения координат позиционирования снаряда ri(xi; yi; zi), скважины R(x; y; z) и параметров ориентации снаряда (Ф; θ) в пространстве в вычислителях 8 и 9 предусмотрены дополнительные (сервисные) алгоритмы контроля процесса вычисления по геометрическим условиям пересечения и сходимости радиусов-векторов (ri и R), а также по условиям ортогональности и коллениарности осей при нормировке матрицы ориентации снаряда.
Достигаемым техническим результатом при реализации предлагаемого изобретения является:
- упрощение схемы и устройств измерений и обработки многомерной информации с последующим повышением показателей надежности, отказоустойчивости и долговечности работы буровой (на снаряде) и стационарной (на поверхности Земли) аппаратуры;
- обеспечение условий полной автономности работы измерительно-вычислительного комплекса, не требующих использования источников дополнительной информации;
- обеспечение условий для получения структурно- и функционально-избыточной информации (за счет увеличения числа контрольных точек наблюдений (
- упрощение схемы формирования электромагнитного и магнитного полей, технологии получения многомерной информации и ее обработки, не требующих реализации трудоемких и дорогостоящих приемов периодического подъема снаряда на поверхность Земли или операции дистанционной передачи информации по соответствующим каналам;
- значительная экономия материальных, временных и финансовых затрат, связанная с исключением приемов периодической остановки процесса бурения, подъема снаряда на поверхность Земли или обусловленная исключением необходимости организации каналов дистанционной передачи информации от снаряда на поверхность Земли.
Следует отметить, что дистанционный геолого-разведочный измерительно-вычислительный комплекс обеспечивает решение задачи бесконтактной идентификации пород, подверженных дистанционному зондированию электромагнитным полем передающей антенны, а также решение задачи дистанционного бесконтактного позиционирования и ориентации снаряда в буровой скважине, причем все устройства измерительно-вычислительной системы расположены только на поверхности Земли, полностью исключена измерительная аппаратура на самом снаряде и полностью исключен канал передачи информации от снаряда на поверхность Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО ЗОНДИРОВАНИЯ, КАРОТАЖА ПОРОД И ПОЗИЦИОНИРОВАНИЯ СНАРЯДА В БУРОВОЙ СКВАЖИНЕ | 2014 |
|
RU2547538C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО ИССЛЕДОВАНИЯ ГОРНЫХ ПОРОД ЗА ОБСАДНОЙ КОЛОННОЙ | 2006 |
|
RU2316026C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 1997 |
|
RU2140539C1 |
| СПОСОБ И СИСТЕМА МАГНИТНОЙ ДАЛЬНОМЕТРИИ И ГЕОНАВИГАЦИИ | 2013 |
|
RU2669974C2 |
| ВЫЯВЛЕНИЕ НЕТРАДИЦИОННЫХ ПЛАСТОВ | 2013 |
|
RU2627947C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |
Изобретение относится к области геологоразведки и может быть использовано при поисковом или эксплуатационном бурении скважин. Устройство в виде геолого-разведочного измерительно-вычислительного комплекса, предназначенного для каротажа пород и позиционирования снаряда в буровой скважине и состоящего из передающей антенны и индуктора с вертикальной осью намагниченности, размещенных на снаряде и изолированных от буровых труб с помощью немагнитной вставки, и измерительно-вычислительной системы, включающей в свой состав трехосные блоки магнитометров, размещенные в контрольных точках наблюдений с известными координатами на поверхности Земли, и вычислители, связанные с приемными антеннами и магнитометрами через аналого-цифровые преобразователи стандартного интерфейса, при этом в устройство вводится измерительно-вычислительный канал ориентации снаряда в пространстве, состоящий из трехосных блоков магнитоградиентометров, устанавливаемых в тех же контрольных точках наблюдений на поверхности Земли, и дополнительного вычислителя, связанного через дополнительный аналого-цифровой преобразователь со всеми трехосными блоками магнитометров и трехосными блоками магнитоградиентометров. Технический результат - повышение надежности, долговечности, автономности. 2 ил.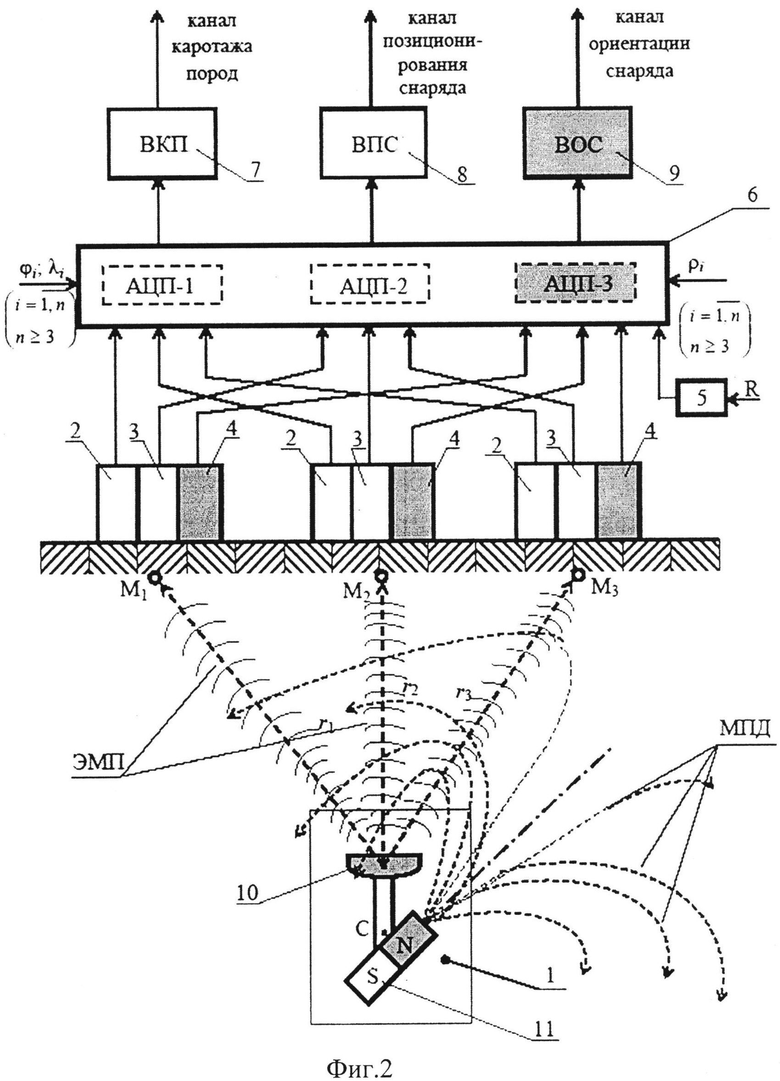
Устройство в виде геолого-разведочного измерительно-вычислительного комплекса, предназначенного для каротажа пород и позиционирования снаряда в буровой скважине и состоящего из передающей антенны и индуктора с вертикальной осью намагниченности, размещенных на снаряде и изолированных от буровых труб с помощью немагнитной вставки, и измерительно-вычислительной системы, включающей в свой состав трехосные блоки магнитометров, размещенные в контрольных точках наблюдений с известными координатами на поверхности Земли, и вычислители, связанные с приемными антеннами и магнитометрами через аналого-цифровые преобразователи стандартного интерфейса, отличающееся тем, что в устройстве вводится измерительно-вычислительный канал ориентации снаряда в пространстве, состоящий из трехосных блоков магнитоградиентометров, устанавливаемых в тех же контрольных точках наблюдений на поверхности Земли, и дополнительного вычислителя, связанного через дополнительный аналого-цифровой преобразователь со всеми трехосными блоками магнитометров и трехосными блоками магнитоградиентометров.
| ГИРОСКОПИЯ И НАВИГАЦИЯ, N 1 (68) 2010, СТР | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

