Область техники, к которой относится изобретение
Изобретение относится к области управления непрерывными технологическими процессами, в частности инерционными объектами, с помощью вычислительных технических средств и может быть использовано в химической, нефтехимической и других отраслях промышленности.
Уровень техники
Известен способ самонастройки системы управления объектом, основанный на подаче управляющего воздействия на объект в виде пробного непериодического сигнала, определении параметров модели объекта на основе его реакции, определении настраиваемых параметров на основе передаточных функций моделей объекта и эталонной системы по критерию перерегулирования при минимальной сложности системы (RU 2304298 С2, 05.10.2005, G05B 13/00).
Известный способ применительно к инерционным объектам не обеспечивает требуемую эффективность самонастройки и приемлемое качество регулирования, так как использует только непериодический пробный сигнал, предусматривает сложную в практической реализации схему настройки совпадением модели объекта и эталонной системы, а используемый критерий является неэффективным для инерционных объектов.
Известен также способ автоматической настройки системы регулирования, основанный на использовании двухпозиционного регулирования с корректировкой значений амплитуды автоколебаний в разных циклах автонастройки, определении момента завершения переходного процесса по достижению равенства сумм ошибки на соседних интервалах и равенства длительностей этих интервалов, определении параметров настройки регулятора по измеренным амплитуде и частоте автоколебаний (RU 2002289 С1, 26.07.89, G05B 13/00).
Известный способ применительно к инерционным объектам не обеспечивает требуемую эффективность самонастройки и приемлемое качество регулирования, так как используемый в способе теоретический подход к реализации частотных методов анализа систем регулирования на практике бывает затруднительным.
Наиболее близким по технической сущности к предлагаемому изобретению является способ оптимальной автоматической настройки системы управления, основанный на подаче на объект управления (ОУ) ступенчатого пробного сигнала с настраиваемой амплитудой и полярностью, определении характерных точек переходного процесса, определении с помощью вспомогательных функций по этим точкам параметров настроек регулятора с критерием максимальной степени устойчивости (RU 2243584 С2, 24.03.2003, G05B 13/00) (прототип).
Недостатком известного способа является недостаточная эффективность самонастройки и низкое качество регулирования инерционных объектов из-за невысокой точности определения параметров используемых в способе характерных точек и сложности применяемых формул, а также неадекватности для инерционных объектов применяемой структуры модели.
Раскрытие изобретения
Цель изобретения - повышение эффективности самонастройки и улучшение качества регулирования инерционных объектов.
Указанная цель достигается тем, что в отличие от известного технического решения, в предлагаемом способе объект управления (ОУ) аппроксимируют апериодическим звеном 1-го порядка с запаздыванием
самонастройку осуществляют в два этапа:
на первом этапе подают ступенчатое воздействие на ОУ, определяют окончание переходного процесса по уменьшению производной выходного сигнала ОУ ниже заданного значения и определяют коэффициент усиления А, на втором этапе включают двухпозиционное регулирование, выдерживают два полных цикла автоколебаний системы, по амплитуде последнего цикла автоколебаний определяют значение отношения 
Описание чертежей
Реализация и особенности предлагаемого способа иллюстрируются фигурами.
Фиг.1. Схема регулирования с обратной связью.
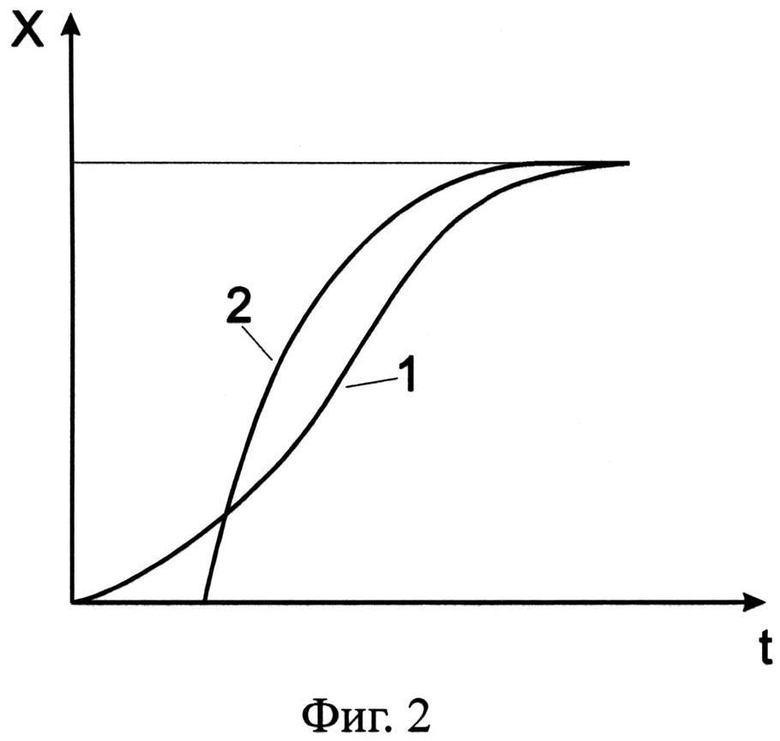
Фиг.2. Кривые разгона объекта и модели.
Фиг.3. Циклограмма самонастройки.
Фиг.4. Зависимости амплитуды автоколебаний
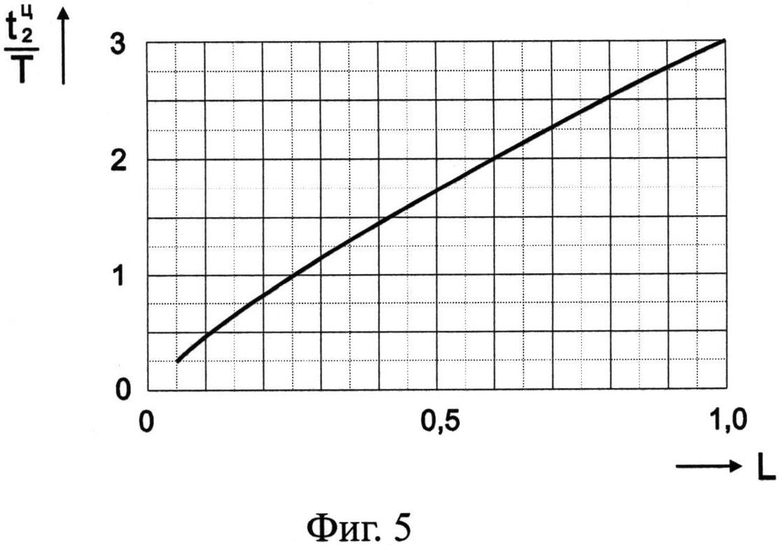
Фиг.5. Зависимости длительности цикла автоколебаний.
Фиг.6. Зависимости оптимальных настроек.
Осуществление изобретения
Схема регулирования с обратной связью, рассматриваемая в предлагаемом способе, представлена на фиг.1.
Алгоритм ПИД-регулирования записывается в следующем виде:

где Е=Хзад-Х - ошибка регулирования.
В предлагаемом способе в качестве аппроксимирующей модели ОУ
используется апериодическое звено 1-го порядка с запаздыванием, имеющее следующую передаточную функцию:

где А - коэффициент усиления;
Т - постоянная времени;
τ - время «чистого» запаздывания.
Такая аппроксимация позволяет описывать широкий круг инерционных объектов, когда запаздывание τ является не фактическим, а эквивалентным.
На фиг.2 показан переходный процесс на скачкообразное воздействие по входу для сложного инерционного объекта (линия 1) и его аппроксимирующей модели (линия 2).
Эквивалентное запаздывание, существенно затрудняющее работу системы регулирования такого объекта, обеспечивает эквивалентные характеристики замкнутой системы. В основу способа положены результаты проведенного исследования на основе цифрового моделирования и оптимизации, поскольку аналитические решения для систем с запаздыванием крайне затруднены. В предлагаемом способе самонастройки комплексно используется как ступенчатое пробное воздействие на объект, так и реализация режима автоколебаний.
На 1-м этапе самонастройки подается ступенчатое воздействие на управляющий канал U при разомкнутой системе регулирования (см. фиг.3).
Момент окончания переходного процесса tпер определяется по выполнению условия (3) (достижение производной выходного сигнала ОУ заданного минимального значения Dmin):

На 1-м этапе самонастройки определяется только коэффициент усиления А:

Далее осуществляется переход ко 2-му этапу самонастройки. В момент tпер включается замкнутая схема двухпозиционного регулирования по следующему алгоритму:

Система переходит в режим автоколебаний (фиг.3). Проведенные расчеты и моделирование показали, что установившийся режим автоколебаний в такой постановке достигается очень быстро, поэтому для определения параметров модели достаточно двух полных циклов автоколебаний.
Для объекта с передаточной функцией (2) основные характеристики определяются в зависимости от отношения
С учетом этой зависимости определяется величина L по измеренной амплитуде bц последнего (второго) цикла автоколебаний (с усреднением амплитуд положительной и отрицательной полуволн для учета возможных нелинейностей ОУ):

Длительность цикла автоколебаний пропорциональна величине L и также пропорциональна величине постоянной времени Т (фиг.5). С учетом этой зависимости определяют величину Т по измеренной длительности цикла 
Таким образом, определены параметры аппроксимирующей эквивалентной модели ОУ: А, τ, Т. По этим параметрам можно определить настройки ПИД-регулирования, оптимальные по критерию минимума модуля ошибки цифрового регулирования:

где h - дискретность регулирования;

n, N - выбирают пропорционально m;
α>0.
Зависимости, по которым определяются оптимальные настройки Кп, Ти, Тд регулятора (1) по критерию (7), показаны на фиг.6. Коэффициент усиления регулятора Kо определяется как 
Критерий (6) обеспечивает достаточно высокое быстродействие при небольшом перерегулировании. Поверхность данного критерия в системе координат настроек пропорциональной, интегральной и дифференциальной составляющих ПИД-регулирования (Кп, Ти, Тд) достаточно пологая в области оптимума, что облегчает настройку регулятора. Кроме того, предлагаемый способ самонастройки достаточно прост в реализации.
Для реализации способа может использоваться, например, регулирующий контроллер БАЗИС-21.2РР или другой из серии БАЗИС® производства ЗАО «Экоресурс». Внедрение предлагаемого способа в серийно выпускаемых контроллерах серии БАЗИС® намечено на 2014 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОЙ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2003 |
|
RU2243584C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С РЕВЕРСИВНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ | 2014 |
|
RU2568523C1 |
| Способ расширения диапазона регулирования АСР без потери устойчивости | 2016 |
|
RU2619746C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |



Изобретение относится к области управления непрерывными технологическими процессами. Техническим результатом является повышение эффективности самонастройки и улучшение качества регулирования инерционных объектов. Для этого предложен способ самонастройки системы ПИД-регулирования, основанный на подаче пробного сигнала на объект управления (ОУ), определении параметров модели ОУ на основе измеренных данных переходного процесса и определении настроек регулирования по параметрам модели, при этом ОУ аппроксимируют апериодическим звеном 1-го порядка с запаздыванием, а самонастройку осуществляют в два этапа: на первом этапе подают ступенчатое воздействие на ОУ, а на втором этапе включают двухпозиционное регулирование, затем определяют настройки ПИД-регулирования, оптимальные по интегральному критерию минимума модуля ошибки регулирования. 6 ил.
Способ самонастройки системы ПИД-регулирования, основанный на подаче пробного сигнала на объект управления (ОУ), определении параметров модели ОУ на основе измеренных данных переходного процесса и определении настроек регулирования по параметрам модели, отличающийся тем, что с целью повышения эффективности самонастройки и улучшения качества регулирования инерционных объектов, ОУ аппроксимируют апериодическим звеном 1-го порядка с запаздыванием

самонастройку осуществляют в два этапа:
на первом этапе подают ступенчатое воздействие на ОУ, определяют окончание переходного процесса по уменьшению производной выходного сигнала ОУ ниже заданного значения и определяют коэффициент усиления А, на втором этапе включают двухпозиционное регулирование, выдерживают два полных цикла автоколебаний системы, по амплитуде последнего цикла автоколебаний определяют значение отношения  по длительности последнего цикла автоколебаний и величине L определяют постоянную времени Т, время запаздывания определяют как τ=LT, затем используя А - коэффициент усиления, τ - время запаздывания и Т - постоянную времени определяют настройки ПИД-регулирования, оптимальные по интегральному критерию минимума модуля ошибки регулирования.
по длительности последнего цикла автоколебаний и величине L определяют постоянную времени Т, время запаздывания определяют как τ=LT, затем используя А - коэффициент усиления, τ - время запаздывания и Т - постоянную времени определяют настройки ПИД-регулирования, оптимальные по интегральному критерию минимума модуля ошибки регулирования.
| СПОСОБ ОПТИМАЛЬНОЙ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2003 |
|
RU2243584C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| RU 2002289 C1, 30.10.1993 | |||
| US 5229699 A1, 20.07.1993. | |||

