Область техники, к которой относится изобретение
Изобретение относится к области управления непрерывными инерционными технологическими объектами с реверсивными электроприводными исполнительными механизмами, с использованием широтно-импульсной модуляции, в частности с помощью вычислительных технических средств (контроллеров), и может быть использовано в различных отраслях промышленности и энергетики.
Уровень техники
Известен способ автоматического управления с широтно-импульсным регулированием, заключающийся в том, что формируют скоростной сигнал ошибки регулирования, формируют широтно-импульсный сигнал из управляющего сигнала и периодического хронирующего сигнала, а управляющий сигнал формируют прямо пропорциональным отношению скоростного сигнала и сигнала ошибки (RU 2050575 С1, 20.12.1995, G05В 13/02).
Известный способ применительно к инерционным объектам не обеспечивает требуемое качество регулирования и надежность, так как не предусматривает возможность использования эффективных для таких объектов алгоритмов регулирования, например ПИД-закона.
Наиболее близким по технической сущности к предлагаемому изобретению является способ автоматического регулирования с широтно-импульсным модулятором и позиционным исполнительным механизмом путем преобразования регулятором ошибки регулирования в соответствии с заданным законом регулирования в управляющее воздействие, дальнейшего формирования широтно-импульсным модулятором серии импульсов, перемещающих исполнительный механизм в сторону «больше» или «меньше», воздействуя на объект регулирования, а также изменения минимальной длительности импульса с учетом модуля сигнала скорости изменения ошибки регулирования (RU 2325682 C1, 20.02.2007, G05В 11/28) (прототип).
Недостатком известного способа является низкое качество регулирования инерционных объектов из-за того, что не учитываются особенности конкретного закона регулирования, а также недостаточная надежность системы регулирования в связи с использованием алгоритма модуляции, предусматривающего избыточно частые включения двигателя исполнительного механизма.
Раскрытие изобретения
Цель изобретения - повышение качества регулирования инерционных объектов и надежности.
Указанная цель достигается тем, что, в отличие от известного технического решения, в предлагаемом способе в каждом периоде модуляции рассчитывают в соответствии с законом регулирования приращение дискретного управляющего воздействия по значениям ошибки регулирования на границах предыдущих периодов модуляции и формируют один управляющий импульс с шириной, пропорциональной полученному приращению, величину периода модуляции выбирают в зависимости от инерционности объекта, а постоянную времени интегральной составляющей закона регулирования задают пропорционально выбранному периоду модуляции.
Описание чертежей
Реализация и особенности предлагаемого способа иллюстрируются чертежами.
Фиг. 1. Схема регулирования с РИМ.
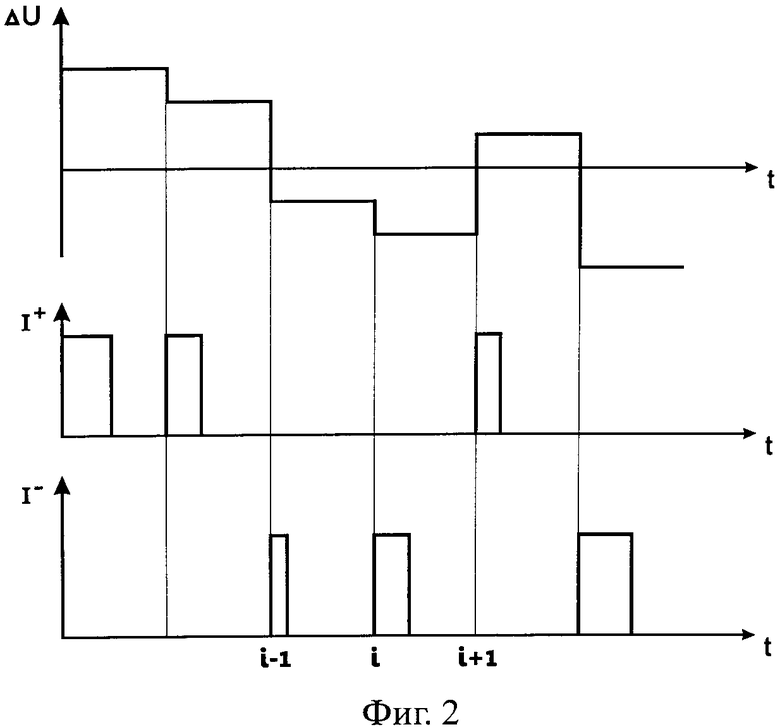
Фиг. 2. Циклограмма управления РИМ.
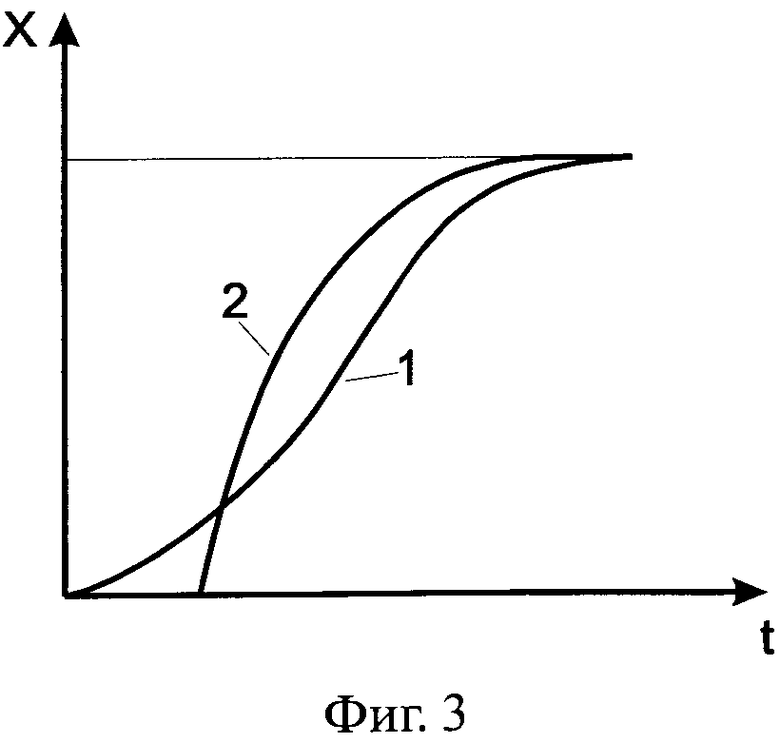
Фиг. 3. Кривые разгона объекта и аппроксимирующей модели.
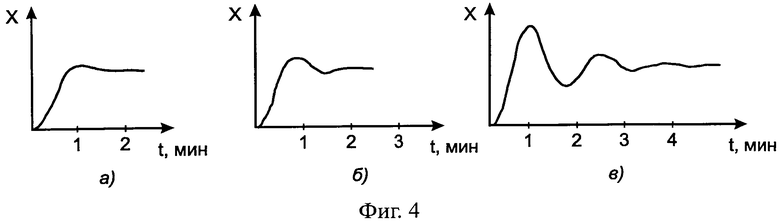
Фиг. 4. Переходные процессы при различных интервалах модуляции.
а) TМ=1 с; б) TМ=4 с; в) TМ=10 с.
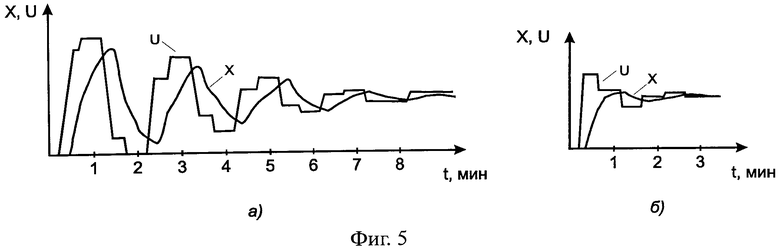
Фиг. 5. Влияние выбора ТИ на переходные процессы при ТМ=30 с.
а) ТИ=15,3 с - оптимальная для непрерывного регулирования;
б) ТИ=46,5 с - рассчитана по формуле (4).
Осуществление изобретения
Применение систем регулирования с использованием реверсивных исполнительных механизмов (РИМ) получило широкое распространение в промышленности. Схема регулирования с широтно-импульсной модуляцией (ШИМ) для РИМ, реализующая предлагаемый способ, представлена на фиг. 1.
В начале каждого периода модуляции осуществляется расчет приращения управляющего воздействия U, например по дискретному алгоритму ПИД-регулирования, который запишем в следующем виде:

где Е=Хзад-X - ошибка регулирования (в % шкалы переменной);
i - номер периода модуляции;
ТМ - период ШИМ, с;
КП - коэффициент пропорциональной составляющей закона регулирования;
ТИ, ТД - постоянные времени интегральной и дифференциальной составляющих закона регулирования, с.
По полученному значению приращения ΔUi+1 рассчитывается ширина импульса Si+1:

где TРИМ - время полного хода исполнительного механизма, с.
Импульс выдается на соответствующий вход РИМ: «прямо» или «обратно» - в зависимости от знака величины ΔUi+1 (см. фиг. 2).
Основными факторами и параметрами, определяющими эффективность регулирования в рассматриваемых системах, являются:
- динамические характеристики объекта управления;
- период модуляции;
- разрешающая способность, определяемая быстродействием системы (временем выдачи дискретных воздействий на электропривод и их срабатывания) и временем полного хода РИМ;
- настройки алгоритма регулирования.
В основу способа положены результаты проведенного исследования на основе цифрового моделирования и оптимизации по интегральному критерию с использованием в качестве аппроксимирующей модели объекта управления апериодического звена 1-го порядка с запаздыванием, имеющего следующую передаточную функцию:

где КОБ - коэффициент усиления;
ТЭКВ - постоянная времени;
τЭКВ - время «чистого» запаздывания.
Такая аппроксимация позволяет описывать широкий круг инерционных объектов, когда запаздывание τЭКВ и постоянная времени ТЭКВ являются не фактическими, а эквивалентными. На фиг. 3 показан переходный процесс на скачкообразное воздействие по входу для сложного инерционного объекта (линия 1) и его аппроксимирующей модели (линия 2).
В рассматриваемых системах важнейшей задачей является выбор периода модуляции ТМ. Уменьшение ТМ до определенного уровня повышает качество регулирования (статическая и динамическая точность), но снижает надежность системы из-за увеличения частоты включения двигателя РИМ. Дальнейшее уменьшение ТМ, когда начинает сказываться разрешающая способность, вызывает увеличение статической ошибки. Выбору малого значения ТМ препятствуют также погрешности измерений и помехи.
Влияние периода модуляции ТМ на качество регулирования иллюстрируется примерами переходных процессов на скачкообразное изменение задания для ТЭКВ=20 с, τЭКВ=10 с, ТРИМ=30 с (фиг. 4). Настройки регулирования здесь заданы равными значениям, оптимальным по интегральному критерию для непрерывного регулирования с аналоговым исполнительным механизмом. При значении отношения запаздывания к постоянной времени объекта 

Установлено, что при реализации предлагаемого алгоритма (1) действие интегральной составляющей (в отличие от других составляющих) в значительной степени зависит от выбранного периода ТМ. Рекомендуется выбирать коэффициент ТИ пропорциональным ТМ: например, для объекта (3) с отношением

где 
Особенно эффективно это для больших периодов модуляции. На фиг. 5 показаны переходные процессы для ТМ=30 с:
а) при настройке, оптимальной для непрерывного регулятора (ТИ=15,3 с);
б) при уточненной по формуле (4) настройке (ТИ=46,5 с).
Предлагаемый способ обеспечивает эффективное регулирование с использованием РИМ при достаточно большом периоде модуляции. Выбирая приемлемое качество регулирования, можно добиться существенного повышения надежности.
Проведенные контрольные расчеты для инерционных объектов более высокого порядка с запаздыванием показали, что полученные для 1-го порядка результаты подтверждаются и для более сложных объектов.
Для реализации способа может использоваться, например, регулирующий контроллер БАЗИС-21.2РР или другой из серии БАЗИС® производства ЗАО «Экоресурс». Внедрение предлагаемого способа в серийно выпускаемых контроллерах серии БАЗИС® намечено на 2014-2015 годы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2549149C2 |
| СПОСОБ КАСКАДНОГО ЦИФРОВОГО РЕГУЛИРОВАНИЯ | 2015 |
|
RU2600024C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ ПИД-РЕГУЛИРОВАНИЯ | 2014 |
|
RU2568386C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2325682C1 |
| Устройство для регулирования разгрузки сгустителя | 1980 |
|
SU924678A1 |
| СПОСОБ ЭЛЕКТРО-ПНЕВМО ПРЕОБРАЗОВАНИЯ | 2014 |
|
RU2568525C1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Устройство для регулирования уровня воды на участке оросительного канала | 1987 |
|
SU1569383A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
Изобретение относится к области управления непрерывными инерционными технологическими объектами с реверсивными электроприводными исполнительными механизмами (РИМ) и может быть использовано в различных отраслях промышленности и энергетики. Способ предусматривает формирование управляющего воздействия в виде двуполярной серии импульсов, перемещающих РИМ в прямом или обратном направлении. В каждом периоде широтно-импульсной модуляции формируют один управляющий импульс с шириной, пропорциональной приращению рассчитанного в соответствии с законом регулирования управляющего воздействия. Величину периода модуляции устанавливают по возможности большей с учетом инерционности объекта, а постоянную времени интегральной составляющей закона регулирования задают пропорционально выбранному периоду модуляции. В результате повышается качество регулирования и надежности. 8 ил.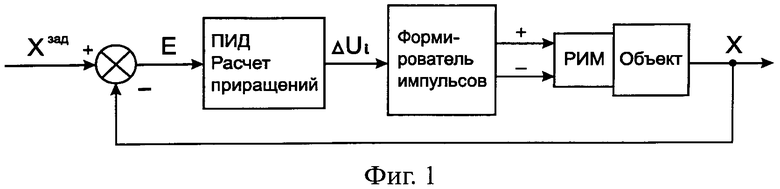
Способ автоматического регулирования с реверсивным исполнительным механизмом путем определения ошибки регулирования, формирования на основе широтно-импульсной модуляции управляющего воздействия в виде двуполярной серии импульсов, перемещающих исполнительный механизм в прямом или обратном направлении, отличающийся тем, что с целью повышения качества регулирования и надежности в каждом периоде модуляции рассчитывают в соответствии с законом регулирования приращение дискретного управляющего воздействия по значениям ошибки регулирования на границах предыдущих периодов модуляции и формируют один управляющий импульс с шириной, пропорциональной полученному приращению, величину периода модуляции выбирают в зависимости от инерционности объекта, а постоянную времени интегральной составляющей закона регулирования задают пропорционально выбранному периоду модуляции.
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2325682C1 |
| Импульсное регулирующее устройство | 1984 |
|
SU1242910A2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| US 4070609 A, 24.01.1978. | |||

