Настоящее изобретение относится к колесу в сборе, и, в частности, к всенаправленному колесу в сборе и к электрическому всенаправленному транспортному средству, оборудованному таким всенаправленным колесом в сборе.
Из известного уровня техники известны различные способы предоставления всенаправленных транспортных средств. Например, документ WO2010/150286 описывает пятиколесное транспортное средство. Каждое колесо может поворачиваться на 360° вокруг линии оси поворота, так что транспортное средство может передвигаться во всех направлениях. Транспортное средство приводится в движение центральным колесом, оборудованным электродвигателем. Линии осей поворота переднего и заднего колес могут быть наклонены вперед или назад. Это транспортное средство имеет недостаток, заключающийся в неустойчивом поведении в ситуациях, когда оно передвигается в поперечном направлении, поскольку положение осей вращения приводит к асимметричной нагрузке на шины и не обеспечивает какого-либо самоцентрирования для управления. Это явление усугубляется, если колесо приводится в движение, поскольку сила сцепления также создает дополнительную тягу обратной силы на колесе, когда оно поворачивается вокруг линии оси поворота. Этот недостаток приводит к проблемам безопасности, поскольку транспортное средство может производить резкие движения, которые могут поставить под угрозу людей, находящихся в нем, в некоторых нештатных ситуациях, таких как нештатный маневр уклонения, колеса не будут иметь устойчивого положения в новом поперечном направлении движения, и это будет создавать отрицательное воздействие на изменение направления. Также следует заметить, что эта конструкция приводит к возрастанию истирания шин, снижая продолжительность их службы. Предложенное центральное колесо не имеет угла или расстояния отклонения от оси вертикали: его устойчивость на высоких скоростях ненадежна. Другим источником потери эффективности является специфичное ведущее центральное колесо. Если мощность должна быть увеличена, двигатель будет увеличен и его вес значительно увеличится, приводя к проблемам при препятствовании индуцированным эффектам неподрессоренной массы. Кроме того, это центральное ведущее колесо делает транспортное средство очень чувствительным к дорожным условиям, и его сила сцепления может быть легко снижена, как если бы единственное ведущее колесо сталкивалось со сниженными условиями сцепления, при этом никакое другое ведущее колесо не смогло бы компенсировать уменьшение силы сцепления. И, наконец, это транспортное средство является технически сложным, что приводит к увеличению стоимости, поскольку периферийные колеса имеют одну конфигурацию, а центральное колесо имеет другую конструкцию, так что части не могут быть стандартизированы для снижения стоимости.
Документ US 3 404 746 описывает другой пример всенаправленного транспортного средства. Транспортное средство имеет пять колес, расположенные по углам четыре шарнирных ролика и одно направляющее колесо с возможностью поворота на 360°, приводимое в действие двигателем, расположенным на раме транспортного средства. Использование шарнирных роликов приводит к технической сложности с двойной подвеской для обеспечения вертикального движения колес. Более того, чтобы иметь подходящую устойчивость, расстояние между колесной осью и рулевым шарниром, расстояние свободного хода должно быть значительным, и тогда колесо в сборе требует большого свободного пространства, чтобы позволить колесу поворачиваться вокруг линии оси поворота или приводной оси. Эти недостатки хорошо известны, и это является причиной, почему эту конструкцию не используют в автомобильной промышленности и она ограничена областью авиации. Что касается двигателя, передача движущей силы от двигателя к колесу является сложной и дорогостоящей.
Целью настоящего изобретения является разрешение этих вышеупомянутых недостатков и прежде всего предоставление первого всенаправленного колеса в сборе, которое может обеспечить большую устойчивость вне зависимости от направления движения транспортного средства, со способностью также адаптировать устойчивость колеса в сборе в реальном времени к условиям езды транспортного средства. Второй целью является предоставление возможности для адаптации транспортного средства к требованиям пользователей касательно эксплуатационных качеств.
С учетом этой цели первым аспектом данного изобретения является всенаправленное колесо в сборе для транспортного средства, содержащее колесо и по меньшей мере одно нижнее подвесное звено и верхний соединительный шарнир, оба из которых могут быть присоединены к транспортному средству, при этом для управления транспортным средством колесо может поворачиваться на 360°, вокруг линии оси поворота, позиционированной указанным по меньшей мере одним нижним подвесным звеном и указанным верхним соединительным шарниром, уже присоединенными к транспортному средству, при этом проекция линии оси поворота на вертикальную плоскость проекции, содержащую вертикальную ось, проходящую через точку контакта между колесом и землей, определяет угол отклонения от указанной вертикальной оси; и отличающееся тем, что вне зависимости от ориентации плоскости проекции всенаправленное колесо в сборе содержит механизмы регулирования, способные регулировать угол отклонения в пределах заранее установленного диапазона. Данное изобретение предоставляет колесо в сборе, которое может поворачиваться на 360° вокруг своей оси поворота с контролируемой устойчивостью, поскольку угол отклонения можно регулировать соответственно. Другими словами, всенаправленное колесо в сборе согласно настоящему изобретению может регулировать угол отклонения в соответствии с направлением, которое задает колесо с возможностью поворота на 360° вокруг вертикальной оси. Вследствие этого устойчивость такого колеса в сборе улучшена, поскольку отсутствует обратная сила, вызванная тем, что шина оттягивает назад колесо в продольном направлении транспортного средства. Рулевой механизм, необходимый для управления таким колесом в сборе, также может быть упрощен, поскольку прилагаемые усилия будут снижены. Использование данного изобретения предоставляет увеличенную устойчивость транспортного средства, а также позволяет уменьшить стоимость и вес рулевого механизма.
Предпочтительно механизмы регулирования могут установить угол отклонения на первую заранее установленную величину, соответствующую стандартным условиям движения, и по меньшей мере на вторую заранее установленную величину, соответствующую нештатным условиям движения. Данное изобретение предоставляет возможность отрегулировать угол отклонения для разных условий передвижения (в городе или на автомагистралях) для оптимизации управляемости транспортного средства. Другими словами, механизмы регулирования могут установить ориентацию угла отклонения на первую величину, если требуются стандартные удобство и устойчивость, или на вторую величину, если необходимы максимальные устойчивость или сцепление, например, при уклоняющемся маневре для предупреждения столкновения.
Предпочтительно механизмы регулирования могут отрегулировать угол отклонения во время условий движения, в ответ на управление, соответствующее условиям движения. Данное изобретение упрощает использование колеса в сборе, потому что регулирование является автоматическим в реальном времени в ответ на команду, поданную управляющим устройством транспортного средства, например. Также может быть возможным осуществлять механическую связь между рулевым механизмом и механизмами регулирования для обеспечения автоматической функции регулирования.
В идеальном случае механизмы регулирования могут регулировать положение верхнего соединительного шарнира. Всенаправленное колесо в сборе согласно настоящему изобретению является легким в использовании, поскольку регулирование ориентации линии оси поворота облегчено движением верхнего соединительного шарнира. Нет необходимости модифицировать нижние подвесные звенья, которые в общем являются сложными, тяжелыми и подверженными высоким нагрузкам. Верхний соединительный шарнир является легкоподвижным при низких усилиях, приложенных к этому шарниру.
Предпочтительно верхний соединительный шарнир содержит корпус, который может поворачиваться вокруг оси симметрии, также содержит шаровой шарнир, принадлежащий линии оси поворота, при этом шаровой шарнир установлен в корпусе на заранее установленном расстоянии от оси симметрии, и вращение корпуса вокруг оси симметрии может регулировать угол отклонения. Этот вариант осуществления для установления величины угла отклонения на 360° является экономичным, поскольку шаровой шарнир, принадлежащий линии оси поворота, установлен в эксцентриковом корпусе, и вращение эксцентрикового корпуса будет определять угол поворота в правильном направлении.
В идеальном случае заранее установленное расстояние является регулируемым. Этот вариант осуществления делает регулирование до двух разных значений экономичным и легким для установки. Это расстояние, которое установит угол отклонения на необходимую величину.
Предпочтительно всенаправленное колесо в сборе содержит рулевой механизм, который может управлять колесом. Колесо в сборе может непосредственно содержать рулевой механизм, остальная часть транспортного средства будет упрощена.
Предпочтительно всенаправленное колесо в сборе содержит тормоз, способный тормозить колесо. Колесо в сборе может содержать тормозное устройство, чтобы, по требованию, легко модулировать функции, предоставляемые колесом в сборе.
Предпочтительно всенаправленное колесо в сборе содержит по меньшей мере один электродвигатель, который может вращать колесо вокруг оси вращения для приложения движущей силы на транспортное средство. Модульный принцип является завершенным; соответственно, колесо в сборе может приводить в движение транспортное средство. Колесо в сборе может реагировать на разные требования от пользователя, который может управлять транспортным средством, тормозить или приводить его в движение. Не представляет затруднений адаптировать транспортное средство к потребностям пользователя. Оно может быть предусмотрено для предложения населению транспортного средства с одним ведущим колесом для города или использования летом, и обеспечения ведущих колес в сборе для замены колес в сборе, которые не являются ведущими, если клиент желает увеличить мощность или показатель силы сцепления, если сцепление является недостаточным, как это может быть в зимних условиях.
Данное изобретение также относится к транспортному средству, содержащему по меньшей мере четыре всенаправленных колеса в сборе по любому из пунктов 1-8 формулы изобретения, отличающееся тем, что два из указанных всенаправленных колеса в сборе являются ведущими, где каждое ведущее всенаправленное колесо в сборе, содержащее по меньшей мере один электродвигатель, который может поворачивать колесо вокруг оси вращения для приложения движущей силы на транспортное средство и в котором указанные два ведущие всенаправленные колеса в сборе установлены на транспортном средстве так, что вертикальная проекция момента, созданного движущими силами на транспортном средстве, равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы. Транспортное средство согласно настоящему изобретению содержит колеса в сборе согласно первому аспекту. Таким образом, устойчивость транспортного средства возрастает во всех направлениях вождения, даже когда транспортное средство движется в поперечном направлении. Это является особо важным при уклоняющемся маневре езды в нештатных условиях. Более того, установка колес в сборе на транспортное средство с нулевым вертикальным крутящим моментом, приложенным к транспортному средству, упрощает конструкцию, поскольку при любом направлении движения колеса, не являющиеся ведущими, не будут испытывать никакого вертикального крутящего момента. Другими словами, в исключительно поперечном направлении движения, благодаря установке ведущих колес в сборе, колеса, не являющиеся ведущими, не требуют рулевого механизма, поскольку отсутствует вертикальный крутящий момент, приложенный к транспортному средству, нет необходимости управлять всеми колесами. Колеса, не являющиеся ведущими, могут быть простыми свободными колесами и, следовательно, их стоимость снижается.
Предпочтительно указанные два ведущих всенаправленных колеса в сборе расположены симметрично относительно центральной точки транспортного средства. Этот вариант осуществления является выгодным для устранения вертикального крутящего момента, созданного силами сцепления.
Данное изобретение также относится к транспортному средству, содержащему по меньшей мере пять всенаправленных колес в сборе по любому из пунктов 1-8 формулы изобретения, отличающемуся тем, что три из указанных всенаправленных колес в сборе являются ведущими, при этом каждое ведущее всенаправленное колесо в сборе содержит по меньшей мере один электродвигатель, который может поворачивать колесо вокруг оси вращения для приложения движущей силы на транспортное средство, и при этом указанные три ведущих всенаправленных колеса в сборе установлены на транспортном средстве так, что вертикальная проекция момента, созданного движущими силами на транспортном средстве, равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы. Транспортное средство согласно настоящему изобретению содержит колеса в сборе согласно первому аспекту. Таким образом, устойчивость транспортного средства возрастает во всех направлениях вождения, даже когда транспортное средство движется в поперечном направлении. Это является особо важным при уклоняющемся маневре езды в нештатных условиях. Более того, установка колес в сборе на транспортное средство с нулевым вертикальным крутящим моментом, приложенным к транспортному средству, упрощает конструкцию, поскольку при любом направлении движения колеса, не являющиеся ведущими, не будут испытывать никакого вертикального крутящего момента. Другими словами, в исключительно поперечном направлении движения, благодаря установке ведущих колес в сборе, колеса, не являющиеся ведущими, не требуют рулевого механизма, поскольку отсутствует вертикальный крутящий момент, приложенный к транспортному средству, нет необходимости управлять всеми колесами. Колеса, не являющиеся ведущими, могут быть простыми свободными колесами, и, следовательно, их стоимость снижается.
Предпочтительно первое ведущее всенаправленное колесо в сборе расположено в центральной точке транспортного средства, и при этом два других ведущих всенаправленных колеса в сборе расположены симметрично относительно первого ведущего всенаправленного колеса в сборе. Этот вариант осуществления является выгодным для устранения вертикального крутящего момента, созданного силами сцепления.
Данное изобретение также относится к транспортному средству, содержащему по меньшей мере пять всенаправленных колес в сборе по п. 9, отличающееся тем, что указанные всенаправленные колеса в сборе расположены на транспортном средстве так, что вертикальная проекция момента, созданного движущими силами на транспортном средстве, равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы. Транспортное средство согласно настоящему изобретению содержит колеса в сборе согласно первому аспекту. Таким образом, устойчивость транспортного средства возрастает во всех направлениях вождения, даже когда транспортное средство движется в поперечном или диагональном направлении. Это является особо важным при уклоняющемся маневре езды в нештатных условиях. Более того, установка колес в сборе на транспортное средство с нулевым вертикальным крутящим моментом, приложенным к транспортному средству, упрощает конструкцию, поскольку при любом направлении движения колеса не будут испытывать никакого вертикального крутящего момента.
Данное изобретение также относится к транспортному средству, содержащему по меньшей мере пять всенаправленных колес в сборе по любому из пунктов 1-8 формулы изобретения, отличающемуся тем, что по меньшей мере пять из указанных всенаправленных колес в сборе являются ведущими, при этом каждое ведущее всенаправленное колесо в сборе содержит по меньшей мере один электродвигатель, который может поворачивать колесо вокруг оси вращения для приложения движущей силы на транспортное средство, и при этом указанные по меньшей мере пять ведущих всенаправленных колес в сборе установлены на транспортном средстве так, что вертикальная проекция момента, созданного движущими силами на транспортном средстве, равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы. Транспортное средство согласно настоящему варианту осуществления оптимизировано для больших объемов транспортирования. Это может быть автобус или грузовой автомобиль, и его способность передвигаться во всех направлениях является действительной, поскольку колесами в сборе согласно первому аспекту придана устойчивость. Перемещение в условиях загруженного движением города или парковка транспортного средства для погрузки или разгрузки теперь облегчается с применением настоящего изобретения. Безопасность длинных и/или тяжело нагруженных транспортных средств, таких как автобусы или грузовые автомобили с прицепом также увеличена, поскольку регулирование угла отклонения улучшает их поведение и тормозные характеристики для предотвращения рисков соскальзывания или складывания.
Другие особенности и преимущества настоящего изобретения будут более ясны из следующего подробного описания конкретных неограничивающих примеров данного изобретения, проиллюстрированных прилагаемыми графическими материалами, где:
-на фиг. 1 представлен вид в перспективе всенаправленного колеса в сборе согласно данному изобретению;
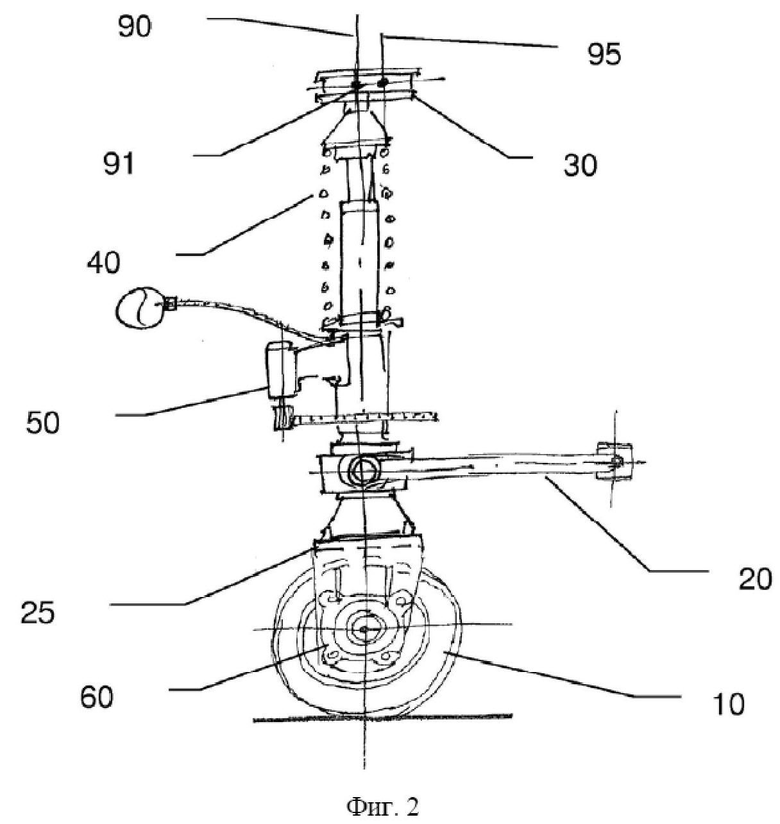
-на фиг. 2 представлен вид сбоку всенаправленного колеса в сборе по фиг. 1;
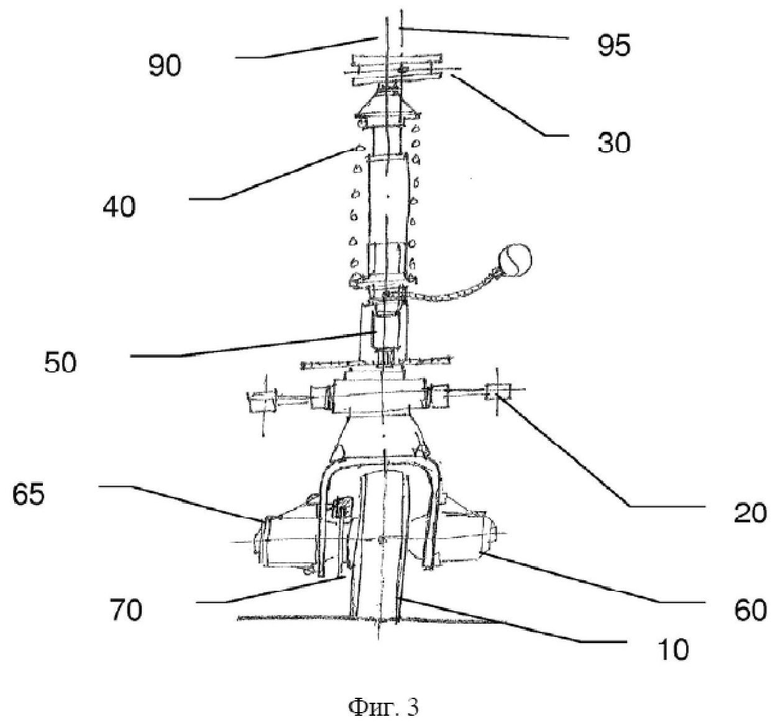
-на фиг. 3 представлен вид спереди всенаправленного колеса в сборе по фиг. 1;
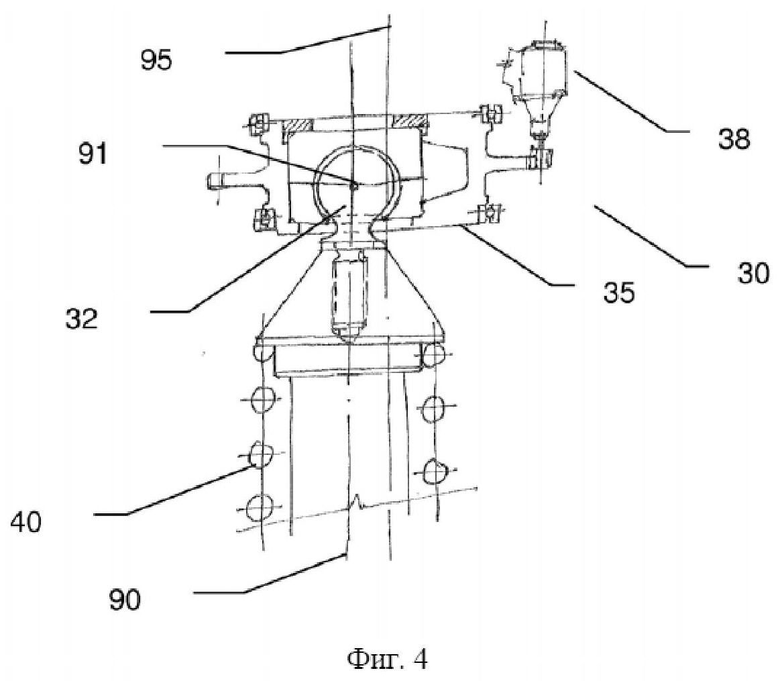
-на фиг. 4 представлен частичный вид всенаправленного колеса в сборе по фиг. 1;
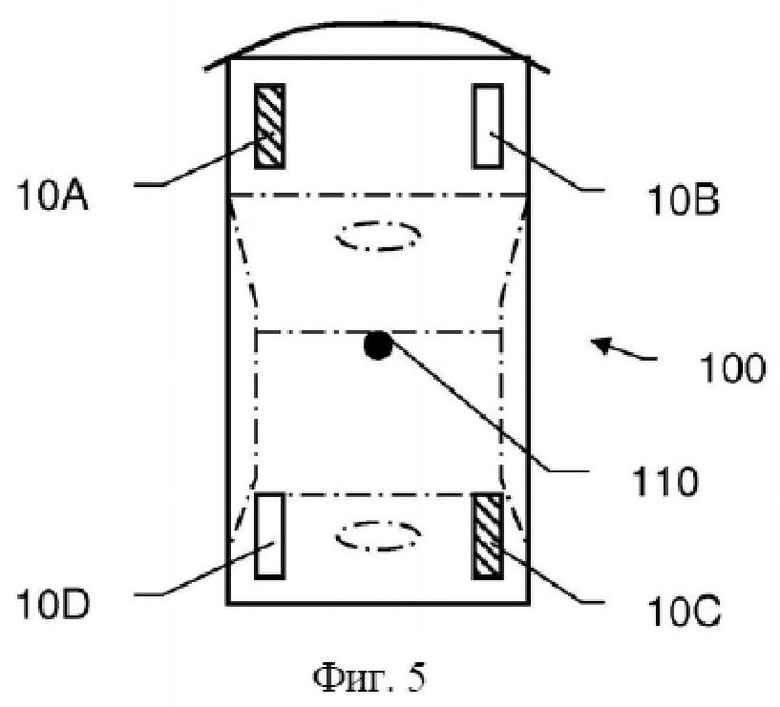
-на фиг. 5 представлен вид сверху транспортного средства согласно варианту осуществления данного изобретения;
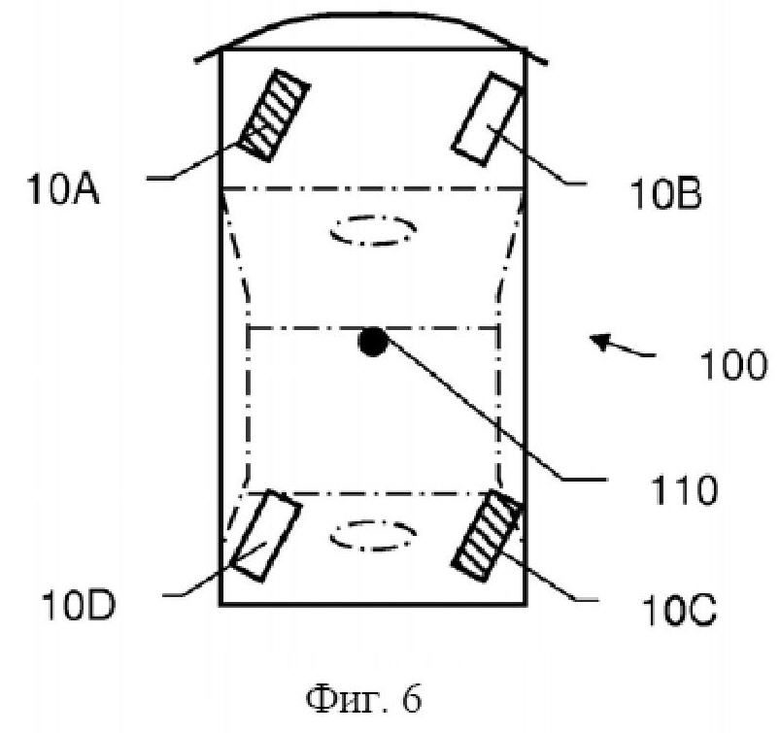
-на фиг. 6 представлен вид сверху транспортного средства по фиг. 5;
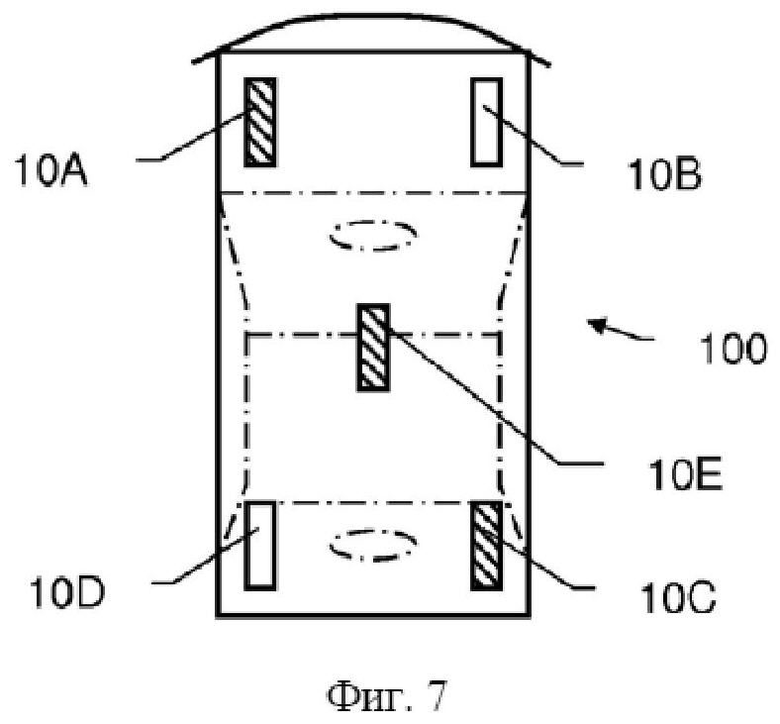
-на фиг. 7 представлен вид сверху транспортного средства согласно другому варианту осуществления данного изобретения;
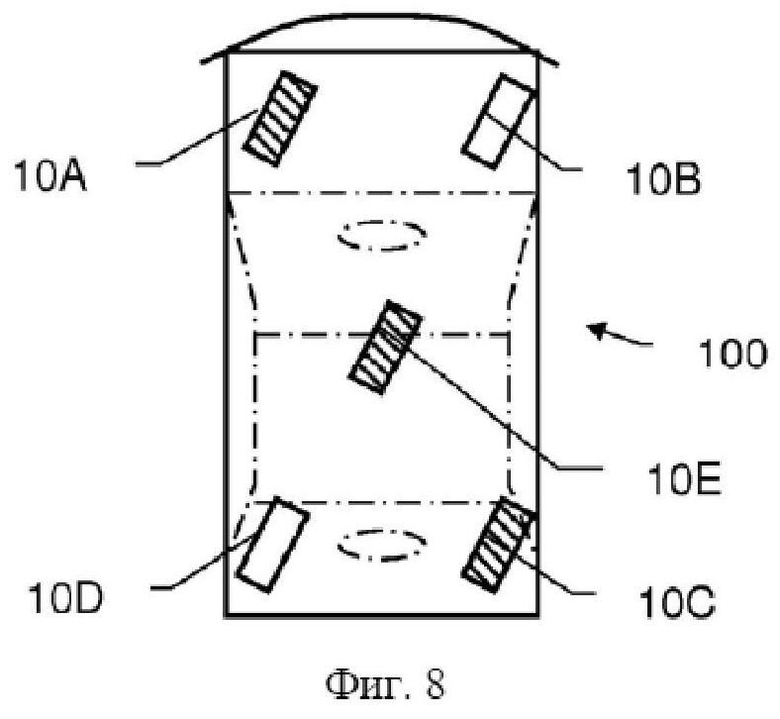
-на фиг. 8 представлен вид сверху транспортного средства по фиг. 7.
Всенаправленное колесо в сборе, представленное на фиг. 1, содержит колесо 10, установленное на вилкообразную деталь 25, и способное вращаться на 360° вокруг линии 90 оси поворота. Эта способность позволяет транспортному средству, снабженному таким всенаправленным колесом в сборе, быть управляемым во всех направлениях. Пользователь может легко управлять транспортным средством для парковки в местах с ограниченным доступом или передвижения в условиях затора в движении транспорта. С этой целью колесо в сборе снабжено рулевым механизмом 50, содержащим электродвигатель 51 управления, соединенный с рулевой рейкой с круглым поперечным сечением. Дополнительно, колесо в сборе содержит два электродвигателя 60, 65 для приложения движущей силы к транспортному средству, хотя один двигатель может быть достаточным, и при необходимости - тормозное устройство 70 для остановки транспортного средства. Подвеска в сборе 40 содержит пружину подвески, присоединенную к демпферу подвески. Подвеска в сборе соединена с транспортным средством посредством нижнего рычага 20 подвески и верхнего соединительного шарнира 30. Эти две детали определяют геометрию колеса в сборе в транспортном средстве и, в частности, угол отклонения, который является проекцией линии 90 оси поворота на вертикальную плоскость проекции, содержащей вертикальную ось, проходящую через точку касания шины с дорогой. Данное изобретение предоставляет регулируемый угол отклонения во всех направлениях, поскольку верхний соединительный шарнир 30 может изменять верхнее положение линии 90 оси поворота путем вращения вокруг оси 95 симметрии. Чтобы позволить коническое движение линии 90 оси поворота, вилкообразная деталь 25 присоединена к нижнему рычагу подвески посредством шарнирного соединения, которое позволяет осуществлять необходимые три оборота между этими двумя частями.
Фиг. 2 представляет вид сбоку всенаправленного колеса в сборе по фиг. 1. Регулирование угла отклонения в любом направлении обеспечено расстоянием между двумя осями 90 и 95. Верхняя точка 91 линии 90 оси поворота, расположенная в эксцентриковой части соединительного шарнира 30, может вращаться вокруг оси 95 симметрии. Это позволяет осуществлять регулирование во всех направлениях угла отклонения.
Фиг. 3 является видом спереди всенаправленного колеса в сборе по фиг. 1, показывая расстояние между осями 90 и 95, позволяющее осуществлять регулирование угла отклонения.
Фиг. 4 изображает в деталях верхний соединительный шарнир 30. Шаровой шарнир 32 принадлежит оси поворота и ее центру, точка 91 является верхней точкой линии 90 оси поворота. Шаровой шарнир 32, установленный в эксцентриковом корпусе 35, может вращаться вокруг оси 95 по команде электродвигателя 38. Расстояние между двумя осями 90 и 95 совместно с расположением под углом эксцентрикового корпуса 35 определяют величину угла отклонения, который является проекцией линии 90 оси поворота на вертикальную плоскость проекции. Поскольку эксцентриковый корпус 35 может вращаться вокруг оси 95 симметрии, угол отклонения является регулируемым вне зависимости от ориентации вертикальной линии проекции. Один вариант может также иметь регулируемое расстояние между двумя осями. Следовательно, угол отклонения может быть отрегулирован вращением эксцентрикового корпуса и/или изменением расстояния между осями 90 и 95.
Фиг. 5 представляет вид сверху всенаправленного транспортного средства, содержащего всенаправленное колесо в сборе, описанное ранее. Транспортное средство 100 содержит четыре колеса 10A, 10B, 10C, 10D. Два из этих колес являются ведущими, колеса 10A и 10C. Они установлены симметрично относительно центральной точки 110, которая может быть центром тяжести. Как следствие, два ведущих колеса в сборе 10A, 10C будут прикладывать движущие силы к транспортному средству, и с симметричной установкой ведущих колес 10A, 10C, вертикальный момент, приложенный к транспортному средству, равен нулю.
Фиг. 6 представляет вид сверху всенаправленного транспортного средства по фиг. 5, в частности условия движения. Четыре колеса 10A, 10B, 10C, 10D ориентированы в одинаковом направлении. Это может быть вследствие движения транспортного средства в небольшой зоне проезда при обхождении препятствия. При симметричной установке ведущих колес 10A, 10C вертикальный момент возникает вследствие приложенных к транспортному средству движущих сил, устойчивость увеличена и отсутствует какое-либо противодействующее усилие, приложенное к транспортному средству. Это преимущество является решающим в нештатных ситуациях, где сцепление может быть потеряно при неожиданных усилиях противодействия, приложенных к транспортному средству. Кроме того, при регулировании угла отклонения, обеспеченном колесами в сборе согласно первому аспекту данного изобретения, поведение транспортного средства при изменениях направления является безопасным и улучшенным.
Фиг. 7 и фиг. 8 представляют виды сверху пяти всенаправленных колес 10A, 10B, 10C, 10D, 10E транспортного средства согласно данному изобретению, обладающего тремя ведущими всенаправленными колесами 10A, 10C, 10E. Ведущие колеса симметрично установлены относительно центральной точки транспортного средства: одно первое ведущее всенаправленное колесо 10E установлено в центральной точке, и два других ведущих всенаправленных колеса установлены симметрично относительно центрального колеса. Те же преимущества устойчивости, как описано по фиг. 6, получены, но транспортное средство обладает большей мощностью и также является менее чувствительным к проскальзыванию, если транспортное средство приведено в движение при плохих условиях сцепления.
Понятно, что очевидные улучшения и/или изменения для специалиста в данной области техники могут быть реализованы в пределах объема данного изобретения, как это определено в прилагаемой формуле изобретения. В частности, может быть предусмотрено использование данного изобретения на транспортном средстве с четырьмя ведущими колесами. Что касается регулирования угла отклонения, может предусматриваться использование линейных подвижных сочленений, чтобы варьировать расстояние между осью симметрии и линией оси поворота. Также возможно управлять автоматически, независимо или одновременно, каждым углом отклонения каждого колеса в сборе, которым оборудовано транспортное средство. Следует отметить, что данное изобретение также может быть использовано для двунаправленного управляемого транспортного средства.
Группа изобретений относится к области транспортного машиностроения. Всенаправленное колесо в сборе для транспортного средства содержит колесо, нижнее подвесное звено и верхний соединительный шарнир, которые присоединены к транспортному средству. Колесо для управления транспортным средством может вращаться вокруг линии оси поворота, определенной нижним подвесным звеном и верхним соединительным шарниром. Проекция линии оси поворота на вертикальную плоскость проекции, содержащую вертикальную ось, проходящую через точку касания между колесом и дорогой, определяет угол отклонения от указанной вертикальной оси. Всенаправленное колесо содержит механизмы регулирования, которые могут регулировать угол отклонения в заранее установленном диапазоне. По первому варианту транспортное средство содержит четыре упомянутых всенаправленных колеса. Два из всенаправленных колес являются ведущими. Каждое ведущее всенаправленное колесо содержит один электродвигатель, который может поворачивать колесо вокруг оси вращения, прикладывая движущую силу к транспортному средству. Ведущие всенаправленные колеса установлены на транспортное средство так, что вертикальная проекция момента равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы. По второму варианту транспортное средство содержит пять всенаправленных колес. Три из указанных всенаправленных колес в сборе являются ведущими. По третьему варианту транспортное средство содержит пять всенаправленных колес, расположенных на транспортном средстве так, что вертикальная проекция момента равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы. По четвертому варианту транспортное средство содержит пять всенаправленных колес, которые являются ведущими. Достигается повышение устойчивости транспортного средства вне зависимости от направления его движения. 5 н. и 10 з.п. ф-лы, 8 ил. 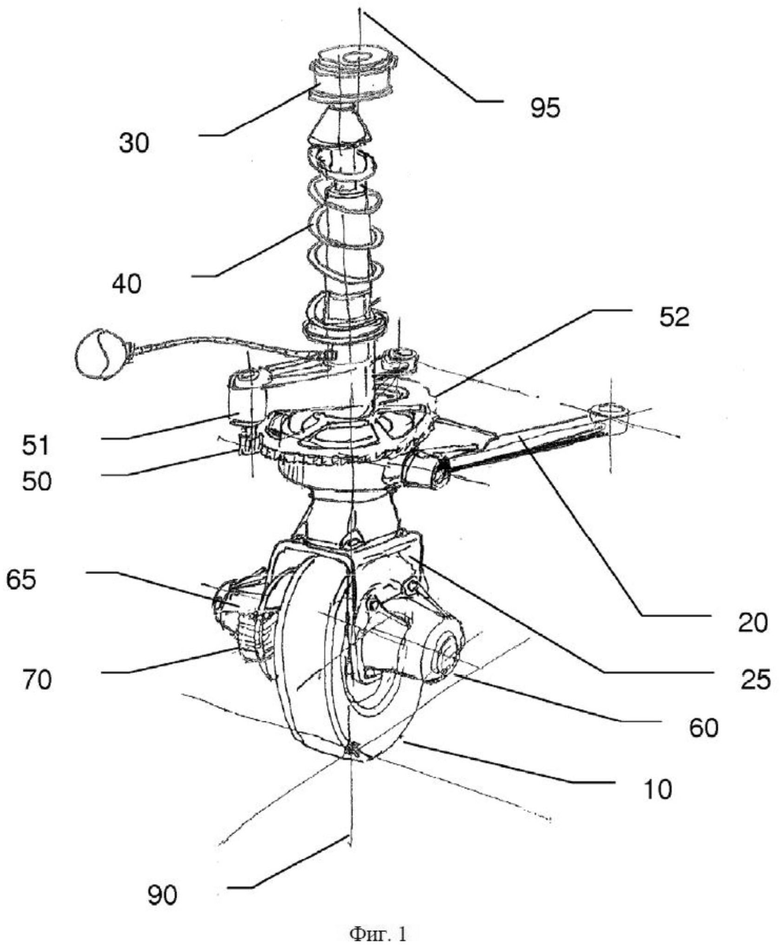
1. Всенаправленное колесо в сборе для транспортного средства, содержащее колесо (10), по меньшей мере одно нижнее подвесное звено (20) и верхний соединительный шарнир (30), оба из которых могут быть присоединены к транспортному средству, при этом колесо (10) для управления транспортным средством может вращаться на 360°, вокруг линии (90) оси поворота, определенной указанным по меньшей мере одним нижним подвесным звеном (20) и указанным верхним соединительным шарниром (30), уже присоединенными к транспортному средству, при этом проекция линии (90) оси поворота на вертикальную плоскость проекции, содержащую вертикальную ось, проходящую через точку касания между колесом (10) и дорогой, определяет угол отклонения от указанной вертикальной оси; и отличающееся тем, что при любой ориентации плоскости проекции всенаправленное колесо в сборе содержит механизмы регулирования, которые могут регулировать угол отклонения в заранее установленном диапазоне.
2. Всенаправленное колесо в сборе по п.1, отличающееся тем, что механизмы регулирования могут установить угол отклонения на первую заранее установленную величину, соответствующую стандартным условиям движения, и по меньшей мере на вторую заранее установленную величину, соответствующую нештатным условиям движения.
3. Всенаправленное колесо в сборе по п.1 или 2, отличающееся тем, что механизмы регулирования могут регулировать угол отклонения во время условий движения, в ответ на управление, соответствующее условиям движения.
4. Всенаправленное колесо в сборе по п.1, отличающееся тем, что механизмы регулирования могут регулировать положение верхнего соединительного шарнира (30).
5. Всенаправленное колесо в сборе по п.1, отличающееся тем, что верхний соединительный шарнир содержит корпус (35), который может вращаться вокруг оси (95) симметрии, а также содержит шаровой шарнир (32), принадлежащий линии (90) оси поворота, при этом шаровой шарнир (32) установлен в корпусе (35) на заранее установленном расстоянии от оси (95) симметрии, и при этом вращение корпуса (35) вокруг оси (95) симметрии может регулировать угол отклонения.
6. Всенаправленное колесо в сборе по п.5, отличающееся тем, что заранее установленное расстояние является регулируемым.
7. Всенаправленное колесо в сборе по п.1, отличающееся тем, что оно содержит рулевой механизм (50), который может управлять колесом (10).
8. Всенаправленное колесо в сборе по п.1, отличающееся тем, что оно содержит тормоз (70), который может тормозить колесо (10).
9. Всенаправленное колесо в сборе по п.1, отличающееся тем, что оно содержит по меньшей мере один электродвигатель (60, 65), который может поворачивать колесо (10) вокруг оси вращения, чтобы приложить движущую силу к транспортному средству.
10. Транспортное средство (100), содержащее по меньшей мере четыре всенаправленных колеса (10A, 10B, 10C, 10D) в сборе по любому из пп.1-8, отличающееся тем, что два из указанных всенаправленных колес (10A, 10C) в сборе являются ведущими, при этом каждое ведущее всенаправленное колесо (10A, 10C) в сборе содержит по меньшей мере один электродвигатель (60, 65), который может поворачивать колесо (10) вокруг оси вращения, прикладывая движущую силу к транспортному средству (100), и при этом указанные два ведущих всенаправленных колеса (10A, 10C) в сборе установлены на транспортное средство (100) так, что вертикальная проекция момента, созданного движущими силами, прилагаемыми к транспортному средству (100), равна нулю, когда все всенаправленные колеса (10A, 10B, 10C, 10D) в сборе одинаково ориентированы.
11. Транспортное средство по п.10, отличающееся тем, что указанные два ведущих всенаправленных колеса (10A, 10C) в сборе расположены симметрично относительно центральной точки (110) транспортного средства.
12. Транспортное средство (100), содержащее по меньшей мере пять всенаправленных колес (10A, 10B, 10C, 10D, 10E) в сборе по любому из пп.1-8, отличающееся тем, что три из указанных всенаправленных колес (10A, 10C, 10E) в сборе являются ведущими, при этом каждое ведущее всенаправленное колесо (10A, 10C, 10E) в сборе содержит по меньшей мере один электродвигатель (60, 65), который может поворачивать колесо (10) вокруг оси вращения, прикладывая движущую силу к транспортному средству (100), при этом указанные три ведущих всенаправленных колеса (10A, 10C, 10E) в сборе установлены на транспортное средство (100) так, что вертикальная проекция момента, созданного движущими силами, прилагаемыми к транспортному средству (100), равна нулю, когда все всенаправленные колеса (10A, 10B, 10C, 10D, 10E) в сборе одинаково ориентированы.
13. Транспортное средство (100) по п.12, отличающееся тем, что первое ведущее всенаправленное колесо (10E) в сборе расположено в центральной точке транспортного средства (100), и при этом два других ведущих всенаправленных колеса (10A, 10C) в сборе расположены симметрично относительно первого ведущего всенаправленного колеса (10E) в сборе.
14. Транспортное средство, содержащее по меньшей мере пять всенаправленных колес в сборе по п.9, отличающееся тем, что указанные всенаправленные колеса в сборе расположены на транспортном средстве так, что вертикальная проекция момента, созданного движущими силами на транспортном средстве, равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы.
15. Транспортное средство, содержащее по меньшей мере пять всенаправленных колес в сборе по любому из пп.1-8, отличающееся тем, что по меньшей мере пять из указанных всенаправленных колес в сборе являются ведущими, при этом каждое ведущее всенаправленное колесо в сборе содержит по меньшей мере один электродвигатель, который может поворачивать колесо вокруг оси вращения для приложения движущей силы к транспортному средству, и при этом указанные по меньшей мере пять ведущих всенаправленных колес в сборе установлены на транспортное средство так, что вертикальная проекция момента, созданного движущими силами, приложенными к транспортному средству, равна нулю, когда все всенаправленные колеса в сборе одинаково ориентированы.
| WO 9819875 A1, 14.05.1998 | |||
| US 2006017248 A1, 26.01.2006 | |||
| РАЗЪЕМНАЯ ПОВОРОТНАЯ КОЛЕСНАЯ ОПОРА | 0 |
|
SU337330A1 |

