Изобретение относится к машиностроению, в частности к транспортным средствам, тягачам, тракторам и самоходным сельскохозяйственным машинам.
Цель изобретения - повышение маневрирования.
На чертеже показано транспортное средство с полноповоротными направляюш,ими колесами и относительно подвижными мостами (осями). Пунктиром показано положение направляюших колес в ведомом режиме их работы. Двигатель и коробка скоростей не показаны.
Транспортное средство содержит управляемый передний мост, включаюш,ий направляющее колесо 1, горизонтальная ось 2 которого смеш,ена поводком 3 от вертикальной оси и поворачивается гидромотором 4, установленным на оси 5, балансир 6 с осью 7, трубки 8, гидромотор 9 для поворота колеса 10, гидрозамок 11, впускаюш,ий жидкость в регулируемый гидронасос 12 только при подаче им жидкости, трубки 13 и 14, вал 15 с замком для блокировки рулевого колеса 16, трубку 17, распределитель 18 гидроуправляемого типа, золотник которого в нейтральном положении удерживается центрируюшими пружинами 19. Задний ведуш,ий мост включает гидромашину 20, ротор которого установлен на полуоси 21, корпус 22, колесо 23, приводимое шестерней 24 и сателлитом 25 дифференциала, шестерню 26 на оси 27, редуктор 28 колеса 29, корпус 30 оси (моста) с главной передачей 31, шарниром 32 и фиксатором 33 для его блокировки, горизонтальный шарнир 34, ручку 35, распределитель 36 реверса, брус 37, бак и насос 38 с гидробаком, являющийся дополнительным источником давления, трубки 39 связи с другим транспортным средством для приема и передачи команд (сигналов) при групповом вождении и шарнир 40 с фиксатором 41 для определения положения переднего моста относительно заднего.
Направляющие колеса 1 и 10 переднего моста установлены с возможностью полного поворота гидромоторами 4 и 9 вокруг вертикальных осей и наклона, если нужно для работы на склонах, за счет гибкости трубок 8. Гидрозамок 11 удерживает колеса 1 и 10 в заданном положении, а оно задается и регулируется гидронасосом 12. Регулируемый гидронасос 12, вал 15 с замком и рулевое колесо 16 регулируют подачу жидкости к гидромоторам 4 и 9 и положение направляющих колес, причем разность давлений передается и в полости распределителя 18. Вал 15 с замком может блокировать гидронасос 12, т.е. снизить подачу жидкости до нуля. Распределитель 18 определяет режим работы гидромашины 20 дифференциала. Корпус и ротор гидромашины 20 связаны с звеньями дифференциала, а полости нагнетания и слива магистралями соединены через
распределители 18 и 36 с источником давления жидкости в виде насоса 38 с гидробаком. Торцовые полости распределителя 18 имеют центрирующие пружины 19 и гидравлически связаны с магистралями нагнетания и слива гидромоторов переднего моста. В приведенном варианте гидромашина 20 связана с щестерней 26, и дифференциал становится управляемым. Корпус задней оси 30 относительно переднего моста подвижен, причем его шарнир 32 имеет фиксатор 33 для фиксации моста в заданном положении. Шарнир 34 допускает поворот мостов. Рычаг 35 управляет задней осью отдельно, если нет переднего моста, например, при выполнении
5 транспортного средства на гусеничном ходу или одноосного энергетического модуля. Распределитель 36 с ручным управлением обеспечивает переключение напорной и сливной магистралей для изменения рода обратной связи (положительной на отрицательную) и
0 принципа управления при движении назад, включении привода направляющих колес и т.д. Трубки 39 связи двух и более транспортных средств передают и принимают команды (сигналы управления) при дублер5 ном и групповом вождении и управлений секционными агрегатами. Шарнир 40 допускает поворот переднего моста гидромашиной, работающей в качестве фиксатора 41. Возможно соединение мостов и другими известными способами.
Настройка связи направляющих колес с золотниковым распределителем 18 гидронасосом 12 рулевого колеса обеспечивает суммирование команд водителя и сигналов об изменении внешних условий в виде боковых сил. Направляющие колеса 1 и 10, горизонтальные оси которых смещены относительно вертикальных осей, реагируют на изменение курса, кривизны линии и радиуса поворота и на линейное отклонение от заданного направления при боковом сползании,
0 заносе и т.д. Направляющие колеса двухсторонне влекомого или полноповоротного типа динамически всегда стабилизируютс.я и, становясь по ходу, сравнивают действительный курс с заданным, выдают сигнал, а в ведущем режиме самостабилизируют движение и выдают сигнал в виде разности давлений в торцовых полостях распределителя 18. Дифференциальная связь направляющих колес 1 и 10 и рулевого управления с распределиTej eM, согласовывая работу колес при крутом повороте между собой и с приводом ведущих колес, управляя дифференциалом, допускает существенное повышение маневренности.
Транспортное средство работает следующим образом.
5 Направляющие колеса 1 и 10 поворачиваются гидромоторами 4 и 9 при подаче жидкости гидронасосом 12 путем поворота вала 15 рулевым колесом 16. Одновременно разность давлений жидкости передается в полости распределителя 18, и, перемещая его золотник включает питание гидромашины 20, которая обеспечивает взаимно противоположное вращение колес 23 и 29 относительно исходной скорости, заданной главной передачей 31, что обеспечивает поворот колес 1 и 10 до устранения сигнала. Также действует транспортное средство при вводе сигнала в виде разности давлений и через трубки 39. При отклонении транспортного средства от заданного курса под действием внещпих сил (возмущающих факторов) возникает боковая реакция почвы на направляющие колеса 1 и 10, которое совместно посредством гидромоторов 4 и 9 создают разность давлений в полостях распределителя 18 и включают питание исполнительной гидромащины 20. При повороте транспортного средства гидромащина 20 работает в моторном режиме, а в других случаях возможна работа в режиме объемной муфты или насоса. Распределители 18 и 36 определяют режим работы,-включают, выключают, переключают напорную и сливную магистрали гидромащины 20 при движении вперед и назад, допускают ручное управление/ включение и выключение привода направляющих колес. При повороте транспортного средства на месте, радиусом, равным нулю, скорость главной передачи 31 равна нулю, направляющие колеса 1 и 10 круто поворачиваются и гидромащина 20, используя вращающий и реактивный моменты, сообщает колесам 23 и 29 взаимно противоположное (встречное) вращение, причем положение центра поворота фиксируется, так как любое отклонение дает сигнал, отработка которого устраняет уход от курса и изменение радиуса поворота. В этом случае колеса 1 и 10 следят за положением центра поворота независимо от направления движения и привода их. Взаимно противоположное движение колес и гусениц транспортного средства существенно облегчает поворот, снижает сдвиг грунта, исключает торможение, устраняет недостатки известного транспортного средства, делает его полуроботом применительно к внещним условиям, повыщает ма-т невренность. Боковая сила направляющих колес в ведущем режиме их работы самостабилизирует движение. В любом случае эта сила дает интегрированную информацию в виде разности давлений для управления дифференциалом. В ведущем режиме направляющие колеса 1 и 10 используют движущую силу для поддержания курса и стабилизации движения до достижения предела чувствительности распределителя 18 усилителя, а затем дают сигнал, пропорциональный ощибке, причем по мере усиления сигнала возрастают их стабилизирующие моменты, по мере устранения ощибки и сигнала плавно возвращаются к нулю и стабилизирующие моменты. Реакция почвы на ведущие направляющие колеса создает стабилизирующий момент, пропорциональный дестабилизирующему моменту, а это допускает расщирение зоны нечувствительности до eC arcsmtgji/y, гдеj5-угол крутизны склона; 5 -коэффициент сцепления. При повороте транспортного средства радиусом, равным нулю, внешнее и внутреннее ведущие направляющие колеса поворачиваются на различные углы: aCj 90-а res c.2 90 + arcsin-, где В-ширина колеи транспортного средства; - смещение горизонтальной оси направляющего колеса от его вертикальной оси (плечо влекомости); L -база транспортного средства. Гидродифференциальная связь гидромоторов колес с гидронасосом 12 рулевого управления и распределителем 18, допуская различие углов, облегчая работу и регулирование колеи и базы, обеспечивает высокую маневренность и независимость этого качества от констр.уктивных и эксплуатационных факторов. Сигнал направляющих колес зависит от режима их работы (ведущий и ведомый), места установки и условий эксплуатаци: в ведущем режиме сигнал во столько раз больше, во сколько раз коэффициент сцепления выще коэффициента сопротивления качению. В любом случае сигнал достаточен для перемещения золотника распределителя 18 и включения усилителя. Численное значение сигналов в ведомом и ведущем режимах работы направляющи.ч колес будет Р G, P, , где(1-силы тяжести в контакте с почвой, / -коэффициент сопротивления качению; Y - коэффициент сцепления; i -передаточное число элементов связи. По мере смещения направляющих колес относительно колес заднего моста, например, с целью стабилизации опорных реакций при работе на склонах, курсовая чувствительность плавно и медленно снижается пропорционально косинусу угла поворота бруса 37, а чувствительность к линейно.му отклонению усиливается так, что вопрос об устойчивости против опрокидывания легко решается без снижения маневренности. Род связи и принцип управления задается в зависимости от режима работы направляющих колес (ведущий, ведомый} и направления движения (вперед, назад) распределителем реверса. При остановке механического привода, т.е. нулевом повороте и движении по линии любой кривизны гидромашина 20, управляя дифференциалом, обеспечивают связь входных и выходных показателей (скоростей и моментов), которая соответствует условиям местности и эксплуатации в различных условиях. При работе гидромашины 20 в режиме гидромотора П1 Пд ± 0,5Пг; Пг Пд ±0,5Пг;.М +0,5Мд; Мг 0,5Мд-Mj., гдеД,-скорость -го колеса; Лг-скорость 2-го колеса; Лд-скорость корпуса дифференциала; Пг-скорость гидромашины; W -враш,аюший момент, подводимый к 1-му колесу; Kg- врашающий момент, подводимый к 2-му колесу; Мд- вращаюший момент на корпусе дифференциала;Mf-вращающий момент гидромашины. При повороте вокруг центра одного колесаПг Пд; П П2 + Пг 2Пд; Па Пд-Пг 0. При повороте радиусом, равным нулю Пд 0; Мд 0; Мг; П1 0, ,5Пг. Для полного использования реакций почвогрунтов нужно регулировать скорости и вращающие моменты осей и колес в пределах различия сцепных возможностей движителей. При равенстве вращающего момента гидромашины половине крутящего момента на корпусе дифференциала Mf 0,5Мд коэффициент блокировки достигает Кб () (Мд-Мг)3. Поворот транспортного средства облегчается и движущими силами направляющих колес, работающих в ведущем режиме. При разгрузке направляющих колес значение поворачивающего момента у известного транспортного средства снижается до нуля. Маневренность предлагаемого транспортного средства обеспечивается поворачивающим моментом, который на равнине и склоне соответственно имеет значение: Мя а:$В; М;1 ОУрВсо5 ; , гдеСг-сила тяжести транспортного средства; У-коэффициент сцепления; f -коэффициент сопротивления качениюУгловая скорость поворота высокоманевренного транспортного средства Q/t; Koc 2frkipip /Bgri p, гдеЦ-подача жидкости в гидромашину щлфференциала;Гк-радиус качения колеса; ip -передаточное число редуктора; 1 гд-передаточное число от ротора гидромашины к полуоси; В - колея транспортного средства; Р.Г- рабочий объем гидромашины; -объем КПД гидромашины. Гидравлическое корректирование скоростей существенно облегчается включением привода направляющих колес.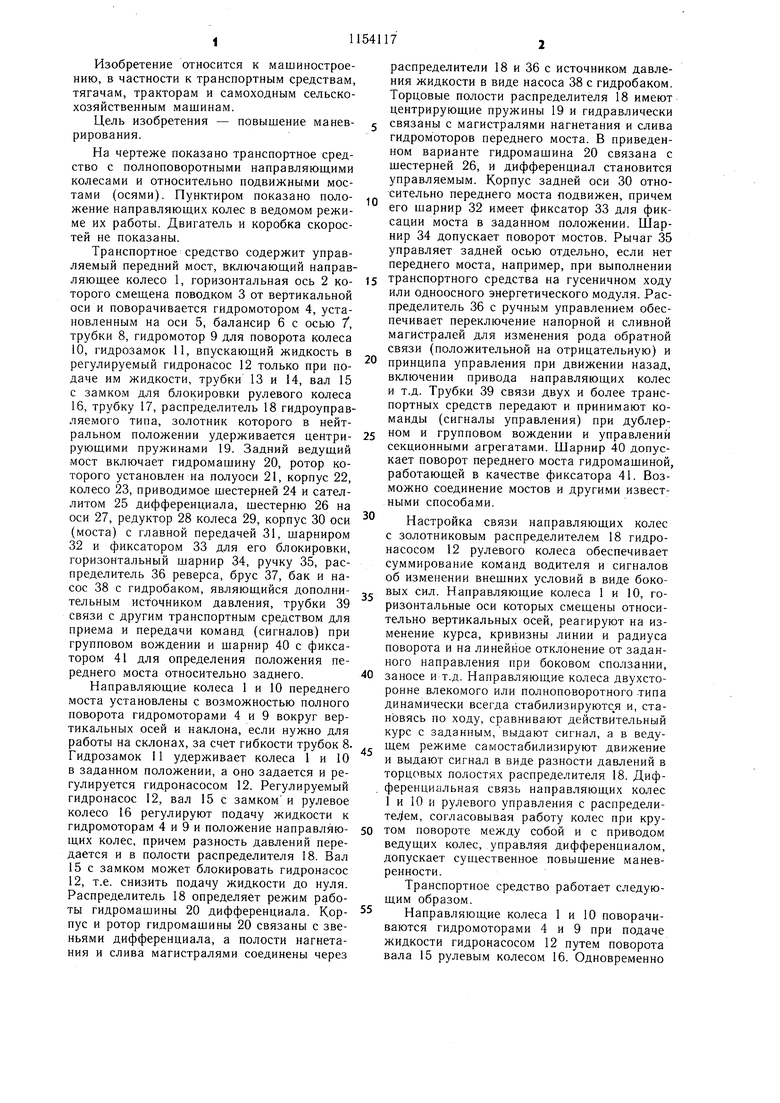
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| Транспортное средство | 1987 |
|
SU1414666A2 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ЛЕСНАЯ МАШИНА | 1995 |
|
RU2118262C1 |
| Двухконтурный гидравлический привод колес транспортного средства | 1981 |
|
SU954263A1 |
| Транспортное средство | 1982 |
|
SU1092061A1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Транспортное средство | 1977 |
|
SU679435A1 |
| Трансмиссия транспортного средства | 1979 |
|
SU897600A1 |
| Гидрообъемная трансмиссия много-ОСНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU819460A1 |
ТРАНСПОРТНОЕ СРЕДСТВО, содержащее управляемый передний мост с приводом колес от гидромоторов, соединенных магистралями с гидронасосом, задний механический мост с приводом колес через дифференциал, рулевое управление, включающее рулевое колесо, отличающееся тем, что, с целью повышения маневрирования. гидронасос выполнен регулируемым с органом управления, связанным с рулевым колесом, дифференциал снабжен объемной гидромащиной, корпус и ротор которой связаны с соответствующими двумя звеньями дифференциала, а полости нагнетания и слива магистралями соединены через распределитель реверса с ручным управлением и золотниковый распределитель режимов работы дифференциала с дополнительным источником давления жидкости и гидробаком, при этом торцовые полости золотникового распределителя магистралями связаны с магистралями нагнетания гидромоторов переднего моста. S сл СП 
| Самоходная машина и ее варианты | 1982 |
|
SU1039746A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
