Настоящее изобретение относится к области гидроакустики и может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах.
Известны методы обработки сигналов шумоизлучения объектов для задач обнаружения, основанные на сравнении уровня принятого сигнала с уровнем помехи (Справочник по гидроакустике. Судостроение. Л.: 1988 г. стр. 26., Бурдик B.C. «Анализ гидроакустичсеских систем». Л.: Судостроение. 1988 г. Стр. 364). Рассматриваемые методы содержат прием временной реализации, набор временных отсчетов фиксированной длительностью, измерение спектров набранной временной реализации, накопление спектров, измерение энергии накопленного спектра и сравнение измеренной энергии с порогом, определенным по помехе, измеренной в отсутствие сигнала.
Аналогичный метод используется при цифровой обработке гидроакустических сигналов, которая включает прием сигнала антенной, усиление, полосовую фильтрацию, аналогово-цифровое преобразование сигнала, предварительную пространственную обработку, спектральную обработку на основе БПФ (быстрое преобразование Фурье), накопление энергетических спектров и представление на дисплей (Применение цифровой обработки сигналов. М.: Мир, 1980 г., Стр. 452). В существующих методах обработки отношение сигнал/помеха увеличивается за счет накопления спектров. Этот способ является наиболее близким аналогом и может быть взят за прототип.
При этом предполагается, что за время накопления спектров динамика собственного движения и динамика движения шумящего объекта не изменяется и входной процесс на входе приемного устройства является стационарным. Поэтому временная реализация на входе остается постоянной и спектральный состав набранных временных реализаций не изменяется, что позволяет накапливать спектры шумоизлучения сигнала и увеличивать отношение сигнал/помеха, поскольку спектральный состав помехи изменяется в каждом временном наборе. Как правило, время накопления спектров выбирается из условия обеспечения требуемого отношения сигнал/помеха и может достигать значительной величины при обнаружении слабых сигналов, поскольку при накоплении уровень принимаемого стационарного детерминированного сигнала увеличивается, а уровень случайной помехи нет.
В гидроакустике известен «эффект Доплера», который заключается в том, что при движении источника или приемника частота излученного сигнала отличается от частоты принятого сигнала (А.С. Колчеданцев «Гидроакустические станции». Л.: Судостроение, 1982 г., с. 21. Дж. Хортон. Основы гидролокации. Л.: Судпромгиз , 1961 г., стр 450). Можно записать: F2=F1+F1V/C, где F1 - частота излученного сигнала, F2 - частота принятого сигнала, V - скорость перемещения, С - скорость звука. Это справедливо в том случае, если перемещение источника происходит непосредственно в направлении приемника. Однако в большинстве случаев перемещение происходит под углом и тогда под скоростью перемещения понимается скорость сближения или радиальная составляющая исходной скорости, которая определяется углом между направлением движения и направлением между источником и приемником. При приеме сигнала шумоизлучения движущегося объекта аналогично происходит смещение спектра за счет взаимного перемещения. Величина смещения частотной составляющей спектра определяется (F2-F1)=F1 (V1cosQ1+V2cosQ2)/C, где V1 и V2 скорости перемещения приемника и излучающего шум объекта, а Q1 и Q2, соответствующие курсовые углы их движения. Если объект шумоизлучения движется с постоянной скоростью и приемное устройство движется с постоянной скоростью, то процесс на входе приемного устройства стационарный и отношение сигнал/помеха можно увеличить за счет накопления. Однако каждый последующий спектр при этом несколько отличается от предыдущего за счет эффекта Доплера, это смещение накапливается во времени и при некотором числе накоплений спектры могут отличаться друг от друга, что снизит отношение сигнал/помеха. Чем выше частота спектра шумоизлучения, тем эти отличия больше зависят от изменения радиальной скорости. Кроме того, изменение спектра входной временной реализации может произойти из-за появления в зоне наблюдения другого мешающего объекта, возникшего на том же пространственном направлении, или в результате совместного маневрирования.
Все это может привести к изменению исходного стационарного входного процесса, при этом методы автоматического определения изменения динамики входного процесса шумоизлучения не известны. В результате снижается достоверность измеряемых спектральных параметров и классификационных признаков, что и является недостатком рассмотренных методов обработки.
Задачей изобретения является повышение достоверности обработки принятого сигнала шумоизлучения.
Техническим результатом предлагаемого изобретения является автоматическое определение изменения стационарности шумового процесса на входе приемного устройства при приеме сигнала шумоизлучения объекта.
Для решения поставленной задачи в способ обработки сигнала шумоизлучения объекта, включающий прием временной последовательности сигнала шумоизлучения, дискретизацию принятой временной последовательности, набор временной последовательности отсчетов, спектральный анализ на основе быстрого преобразования Фурье, последовательное накопление энергетических спектров и представление результата, на индикатор введены новые признаки, а именно: запоминают первый энергетический спектр первого набора временной последовательности, определяют коэффициент корреляции между первым принятым спектром и каждым следующим накопленным спектром, запоминают коэффициенты корреляции при каждом очередном накоплении, сравнивают коэффициенты корреляции и при уменьшении коэффициента корреляции уменьшают число накоплений до значения, при котором коэффициент корреляции равен пороговому, при этом, если коэффициент корреляции не достиг порогового значения, выносят решение об изменении стационарности поступления спектров шумоизлучения объекта.
Сущность изобретения заключается в следующем. Помеха представляет собой случайный стохастический процесс, интервал корреляции по времени которого определяется полосой помехи. Таким образом, спектры временных реализаций, набранных за время, большее, чем интервал корреляции помехи, будут случайными и поэтому коэффициент корреляции между этими спектрами будет близким к нулю. Время набора временной реализации существенно больше интервала корреляции шумовой помехи. Процесс шумоизлучения объекта является стационарным случайным процессом, но его случайность во времени детерминирована. Спектр шумоизлучения объекта является случайным относительно спектров шумоизлучения других объектов, а для данного объекта процесс шумоизлучения закономерен и состоит на данном временном интервале из одних и тех спектральных составляющих, Спектр шумоизлучения для каждого объекта характеризуется своими спектральными особенностями, что позволяет их классифицировать по спектральному составу и по виду спектра создавать портрет объекта (Л.Л. Мясников, Е.Н. Мясникова. "Автоматическое распознавание звуковых образов". Л.: Энергия, 1970 г., стр. 153).
Конкретный спектр характеризует особенность данного объекта при фиксированных параметрах его движения и в этом смысле он является детерминированным. Таким образом, для данного объекта спектры временных последовательных реализаций будут похожими и при накоплении суммарный спектр будет похож на начальный спектр. Это означает, что если будет определен коэффициент корреляции между спектрами последовательных временных реализаций и начальным спектром и он окажется больше пороговой величины, то это означает, что на входе системы обработки в процессе накопления действует один и тот же временной сигнал. Однако, поскольку при взаимном перемещении изменяется радиальная составляющая скорости, то из-за «эффекта Доплера» будет иметь место некоторое смещение спектров в последовательных временных реализациях, что приведет к искажению суммарного спектра и уменьшению коэффициента корреляции. Это говорит о том, что при существующей радиальной скорости перемещения объектов существует оптимальное число накоплений, при котором изменения накопленного спектра меньше допустимых и которое можно определить и автоматически поддерживать. При работе в реальных условиях достаточно часто возникают ситуации, когда исходный временной сигнал на входе искажается за счет поступления сигнала шумоизлучения другого объекта, возникшего случайно на том же направлении, или за счет приема мешающего сигнала, приходящего по боковому полю характеристики направленности. Все это приводит к искажению стационарности исходного процесса наблюдения и снижению коэффициента корреляции. В этом случае измеряемые параметры не будут соответствовать параметрам объекта шумоизлучения. Таким образом, если можно сравнить коэффициент корреляции спектров между начальным спектром и последовательными накопленными спектрами и определить коэффициент корреляции между ними, то можно идентифицировать степень схожести спектров шумоизлучения на входе и обеспечить оптимальное время накопления. Если оптимальное время накопления не удается откорректировать, то это означает, что искажение спектра более глубокое и связано с изменением внешних условий наблюдения и измеряемые параметры объекта шумоизлучения не соответствуют исходным
Блок-схема устройства, реализующая предлагаемый способ обработки сигнала шумоизлучения объекта, представлена на фиг. 1.
Устройство (фиг. 1) содержит последовательно соединенные антенну 1 с приемным устройством, АЦП (аналогово-цифровой преобразователь) 2, блок 3 БПФ (блок спектрального анализа), коррелятор 5, блок 6 памяти и сравнения, блок 7 принятия решения, блок 8 корректировки и блок накопителя 4. Второй выход блока 3 БПФ соединен со вторым входом накопителя 4, а выход накопителя 4 соединен со вторым входом коррелятора 5.Второй выход блока 3 БПФ соединен с входом индикатора 9, второй выход блока 7 соединен со вторым входом индикатора 9.
Способ посредством устройства (фиг. 1) осуществляется следующим образом. Антенна 1 с приемным устройством принимает входной сигнала шумоизлучения объекта, передает на блок 2 АЦП, где аналоговый сигнал превращается в цифровой вид и последовательно во времени дискретизированные отсчеты наборами фиксированной длительностью передаются на блок 3 БПФ, который производит последовательное определение спектров принятого входного дискретизированного сигнала. С выхода блока 3 БПФ первый спектр поступает на коррелятор 5 и одновременно на накопитель 4, с выхода которого поступает на второй вход коррелятора, на выходе которого формируется коэффициент корреляции между первым сигналом и вторым сигналом с выхода накопителя. Полученная оценка коэффициента корреляции поступает в блок 6 памяти. Второй спектр с выхода блока 3 БПФ поступает на накопитель 4, где складывается с предыдущим спектром и накапливается. Число накоплений выбирается априорно при выборе порога обнаружения. Суммарный спектр подается на коррелятор и определяется коэффициент корреляции с первым запомненным спектром. Выработанная оценка коэффициента корреляции поступает на блок памяти 6 и сравнивается с первым запомненным коэффициентом корреляции, если он не отличается от исходного коэффициента корреляции, то в блоке выносится решение, что спектры идентичны. Таким образом, на один вход коррелятора будут поступать спектры временной реализации первого набора измерения, а на другой вход - суммарные спектры последующих временных реализаций. В корреляторе происходит измерение коэффициента корреляции между первым спектром и суммарными последовательными спектрами при известном числе накоплений, который выбирается априорно при выборе порога обнаружения. Если коэффициент корреляции больше порогового значения, то принимается решение о наличии стационарного сигнала. Предельные значения коэффициента корреляции заключены между 0,6 и 1, что обеспечит диапазон флюктуаций коэффициента корреляции за счет случайного воздействия входной помехи и условий распространения. При плавном уменьшении коэффициента корреляции, вызванном изменением входных спектров за счет влияния доплеровского смещения частоты спектра, производится корректировка числа накоплений. При этом формируется выходной сигнал, который передается в блок 8 корректировки, где происходит снижение числа накоплений для восстановления коэффициента корреляции. Если увеличение коэффициента корреляции после корректировки не произошло, то формируется сигнал о прекращении использования полученных спектральных оценок для выработки классификационных признаков и оценки параметров движения объекта до восстановления нового контакта с выбранным объектом шумоизлучения. Одновременно на индикатор 9 поступают спектры с выхода блока 3 БПФ для представления оператору и на второй вход индикатора 9 с выхода блока 7 поступает решение об изменении коэффициента корреляции.
Антенна и приемное устройство 1 и аналогово-цифровой преобразователь АЦП 2 являются известными устройствами, которые используются в прототипе. Алгоритмы определения спектров на основе быстрого преобразования Фурье достаточно подробно изложены на стр. 441-463 («Применение цифровой обработки сигналов». М.: Мир, 1980 г. Под. редакцией Э. Оппенгейма). В современной гидроакустической аппаратуре сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов (см. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». СПб.: Наука, 2004 г., стр. 164-176, стр. 278-295). В процессоре реализуются все блоки предлагаемого устройства, такие как спектральная обработка на основе БПФ, корреляционная обработка, блоки памяти, процедуры сравнения, накопления, принятия решения и корректировки. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб. «БХВ - Петербург», 2011 г.).
Таким образом, используя последовательную корреляционную обработку спектров, можно автоматически оценить степень стационарности входного процесса и принять необходимые меры для обеспечения достоверности измерений по наблюдаемому объекту.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАНЕВРА ШУМЯЩЕГО ОБЪЕКТА | 2016 |
|
RU2634786C1 |
| Способ обработки сигнала шумоизлучения цели | 2022 |
|
RU2776442C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2555194C1 |
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2570430C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
Использование: изобретение относится к гидроакустике и может быть использовано при разработке гидроакустической аппаратуры, предназначенной для обнаружения шумящих объектов. Сущность: способ обработки сигнала шумоизлучения объекта содержит прием временной последовательности сигнала шумоизлучения, дискретизацию принятой временной последовательности, набор первой временной последовательности отсчетов, спектральный анализ на основе быстрого преобразования Фурье, последовательное накопление спектров и представление на индикатор, производят запоминание первого спектра, определение коэффициента корреляции между первым принятым спектром и каждым следующим накопленным спектром, запоминают коэффициенты корреляции при каждом очередном накоплении, при уменьшении коэффициента корреляции выносят решение об изменении стационарности поступления спектров шумоизлучения объекта и выбирают то число накоплений, при котором обеспечивался бы максимальный коэффициент корреляции. Технический результат: автоматическое определение изменения стационарности шумового процесса на входе приёмного устройства при приёме сигнала шумоизлучения. 1 ил. 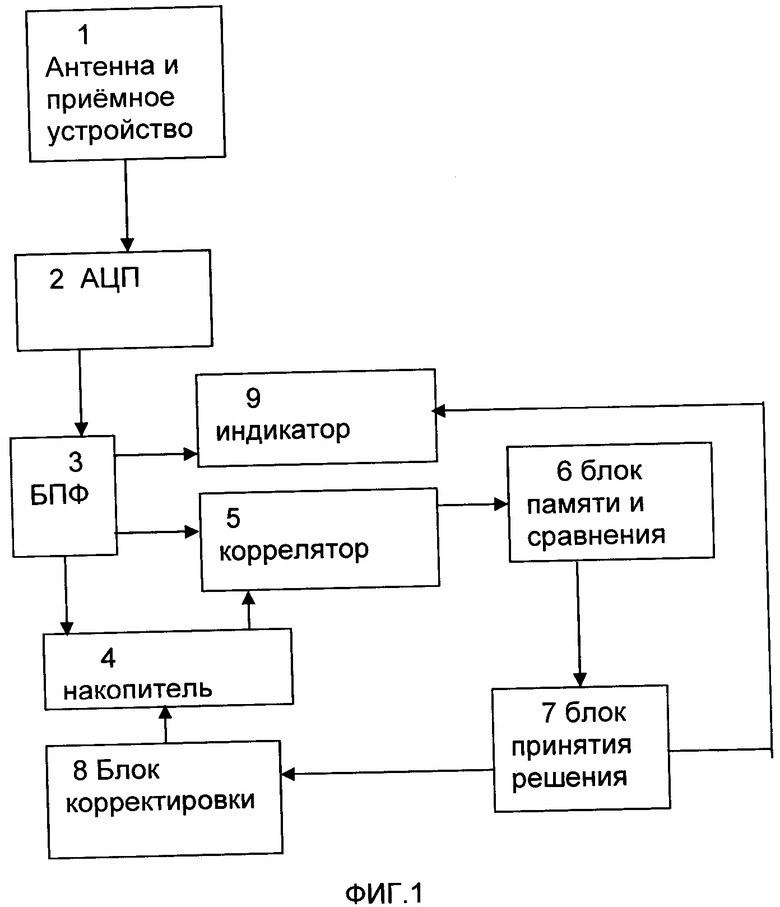
Способ обработки сигнала шумоизлучения объекта, содержащий прием временной последовательности сигнала шумоизлучения, дискретизацию принятой временной последовательности, набор временной последовательности отсчетов, спектральный анализ на основе быстрого преобразования Фурье, последовательное накопление спектров и представление на индикатор, отличающийся тем, что запоминают первый спектр первого набора временной последовательности, определяют коэффициент корреляции между первым принятым спектром и каждым следующим накопленным спектром, запоминают коэффициенты корреляции при каждом очередном накоплении, сравнивают коэффициенты корреляции и при уменьшении коэффициента корреляции уменьшают число накоплений до значения, при котором коэффициент корреляции больше или равен пороговому, при этом, если коэффициент корреляции не достиг порогового значения, выносят решение об изменении стационарности поступления спектров шумоизлучения объекта.
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ СИГНАЛОВ | 2009 |
|
RU2419968C2 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ-ПОМЕХА | 2011 |
|
RU2466416C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ШУМОИЗЛУЧЕНИЯ | 1997 |
|
RU2128848C1 |
| US5422860 A, 06.06.1995. | |||

