Настоящее изобретение относится к области гидроакустики и может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах и определения параметров движения обнаруженного объекта. Известны методы определения маневра объекта при визуальном слежении за объектом с использованием измерения пеленга на движущийся объект. (Справочник по исследованию операций. В.А. Абчук и др. Москва, ВИМО, 1979 г., стр 214). Недостатком этого способа является длительное визуальное наблюдение за объектом, и большое время принятия решения, что практически исключает его использование при телеметрических методах обнаружения.
Известны методы обработки сигналов шумоизлучения объектов для задач обнаружения в гидроакустике, основанные на сравнении уровня принятого сигнала с уровнем помехи (Справочник по гидроакустике. Л., Судостроение, 1988 г., стр. 26.; Бурдик B.C. «Анализ гидроакустических систем». Л., Судостроение, 1988 г., стр. 364). Рассматриваемые методы содержат прием временной реализации, набор временных отсчетов фиксированной длительностью, измерение спектров набранной временной реализации, накопление спектров, измерение энергии накопленного спектра и сравнение измеренной энергии с порогом, определенным по помехе, измеренной в отсутствие сигнала. При изменении уровня сигнала и отношения сигнал/помеха принимают решение и наличии маневра.
Аналогичный метод используется при цифровой обработке гидроакустических сигналов, который содержит прием сигнала антенной, усиление, полосовую фильтрацию, аналого-цифровое преобразование сигнала, предварительную пространственную обработку, спектральную обработку на основе БПФ (быстрое преобразование Фурье), накопление энергетических спектров и представление на дисплей (Применение цифровой обработки сигналов. М.: Мир, 1980 г., стр. 452). Этот способ является наиболее близким аналогом и может быть взят за прототип. В существующих методах обработки отношение сигнал\помеха увеличивается за счет накопления спектров.
Недостатком способа является невозможность автоматического обнаружения момента проведения маневра источником шумоизлучения и определить характер проведенного маневра.
Предполагается, что за время накопления спектров динамика собственного движения и динамика движения шумящего объекта не изменяется и входной процесс на входе приемного устройства является стационарным. Поэтому временная реализация на входе остается постоянной и спектральный состав набранных временных реализаций не изменяется, что позволяет накапливать спектры шумоизлучение сигнала и увеличивать отношение сигнал/помеха, поскольку спектральный состав помехи изменяется в каждом временном наборе. Как правило, время накопления спектров выбирается из условия обеспечения требуемого отношения сигнал/помеха и может достигать значительной величины при обнаружении слабых сигналов. Поэтому при большом накоплении сложно обнаружить изменение стационарности, обусловленной маневром объекта, тем более сложно определить характер маневра. Изменение уровня сигнала характеризует наличие изменения стационарности, которая обусловлена маневром объекта.
Задачей изобретения является повышение достоверности обработки принятого сигнала шумоизлучения и определения момента изменения стационарности за счет маневра объекта шумоизлучения, а также определение характера проведенного маневра.
Техническим результатом предлагаемого изобретения является автоматическое определение момента изменения стационарности шумового процесса на входе приемного устройства при приеме сигнала шумоизлучения объекта и определения характера проведенного маневра.
Для решения поставленной задачи в способ обработки сигнала шумоизлучения объекта, содержащий прием временной последовательности сигнала шумоизлучения, дискретизацию принятой временной последовательности, набор отсчетов временной последовательности, спектральный анализ на основе быстрого преобразования Фурье, последовательное накопление энергетических спектров и представление результата на индикатор, введены новые признаки, а именно: обработку сигнала производят в высокочастотном диапазоне принятого сигнала шумоизлучения при минимальном времени накопления, запоминают первый накопленный энергетический спектр первых наборов временной последовательности, определяют энергию сигнала шумоизлучения как сумму амплитуд спектральных составляющих каждого набора, определяют коэффициент корреляции между энергетическим спектром первого набора и энергетическим спектром каждого следующего набора, запоминают коэффициенты корреляции при каждом очередном накоплении, сравнивают коэффициенты корреляции и при увеличении коэффициента корреляции и снижении уровня энергии сигнала в последовательных накопленных спектрах принимают решение, что цель снизила скорость движения, при уменьшении коэффициента корреляции и при увеличении энергии сигнала шумоизлучения принимают решение, что цель увеличила скорость движения, а если уровень энергии сигнала не изменился, а коэффициент корреляции уменьшился, то принимают решение, что цель изменила направление движения.
Сущность изобретения заключается в следующем. Помеха представляет собой случайный стохастический процесс, интервал корреляции по времени которого определяется полосой помехи. Таким образом, спектры временных реализаций, набранных за время большее, чем интервал корреляции помехи, будут случайными, и поэтому коэффициент корреляции между этими спектрами будет близким к нулю. Процесс шумоизлучения объекта является стационарным случайным процессом, но его случайность на коротком интервале времени детерминирована. Спектр шумоизлучения объекта является случайным относительно спектров шумоизлучения других объектов, а для данного объекта процесс шумоизлучения закономерен, поскольку состоит на данном временном интервале из одних и тех же спектральных составляющих. Спектр шумоизлучения для каждого объекта характеризуется своими спектральными особенностями, что позволяет их классифицировать по спектральному составу и по виду спектра создавать портрет объекта. Время набора временной реализации практически всегда в современных средствах обработки существенно больше интервала корреляции шумовой помехи. (Л.Л. Мясников, Е.Н. Мясникова. "Автоматическое распознавание звуковых образов". Л., Энергия, 1970 г.).
Конкретный спектр характеризует особенность данного объекта при фиксированных параметрах его движения, и в этом смысле он является детерминированным. Таким образом, для данного объекта спектры временных последовательных реализаций будут похожими, и при накоплении суммарный спектр будет похож на начальный спектр. Это означает, что если будет определен коэффициент корреляции между спектрами последовательных временных реализаций и начальным спектром, и он окажется больше пороговой величины, то на входе системы обработки в процессе накопления действует один и тот же временной сигнал. Маневр объекта включает в себя либо изменение скорости движения, либо изменение направления движения. В том и другом случае происходят спектральные изменения состава сигнала шумоизлучения. Увеличение скорости движения влечет за собой увеличение уровня сигнала шумоизлучения, изменение его спектрального состава и соответственно уменьшение коэффициента корреляции между последовательными спектрами на момент увеличения скорости. Если маневр связан с изменением направления движения, то изменяется пространственное положение объекта, уровень шумоизлучения практически не изменяется, а спектральный состав изменяется за счет изменения направления движения источника шумоизлучения, что приводит к уменьшению коэффициента корреляции.
В гидроакустике известен «эффект Доплера», который заключается в том, что при движении источника или приемника частота излученного сигнала отличается от частоты принятого сигнала (А.С. Колчеданцев. «Гидроакустические станции». Л., Судостроение, 1982 г., с. 21; Дж. Хортон. Основы гидролокации. Л., Судпромгиз, 1961 г., стр 450). Можно записать: F2=F1+F1V/C, где F1 - частота излученного сигнала, F2 - частота принятого сигнала, V - скорость перемещения, С - скорость звука. Это справедливо в том случае, если перемещение источника происходит непосредственно в направлении приемника. Однако в большинстве случаев перемещение происходит под углом и тогда под скоростью перемещения понимается скорость сближения или радиальная составляющая исходной скорости, которая определяется углом между направлением движения и направлением между источником и приемником. При приеме сигнала шумоизлучения движущегося объекта аналогично происходит смещение спектра за счет взаимного перемещения. Величина смещения частотной составляющей спектра определяется (F2-F1)=F1(V1cosQ1+V2cosQ2)/С, где V1 и V2 скорости перемещения приемника и излучающего шум объекта, Q1 и Q2 соответствующие курсовые углы движения объекта до маневра и после маневра, a F2, F1 частота до начала манера и после маневра. Чем выше частотная составляющая спектра шумоизлучения, тем существенней отличаются коэффициенты корреляции последовательных спектров на момент проведения маневра. Этим объясняется необходимость выбора высокочастотной части принятого сигнала шумоизлучения для определения изменения стационарности процесса. Поскольку при взаимном перемещении изменяется радиальная составляющая скорости, то из-за «эффекта Доплера» будет иметь место некоторое смещение спектров в последовательных временных реализациях, что приведет к уменьшению коэффициента корреляции. Таким образом, если можно сравнить коэффициенты корреляции между последовательными спектрами, то можно определить момент проведения маневра источника шумоизлучения по изменению скорости или направления движения. Поскольку сам процесс проведения маневра является кратковременным, то изменение спектра соответствует только моменту маневра и различия коэффициентов корреляции соответствует только моменту маневра. Поэтому время накопления должно быть минимальным, меньше, чем время проведения маневра.
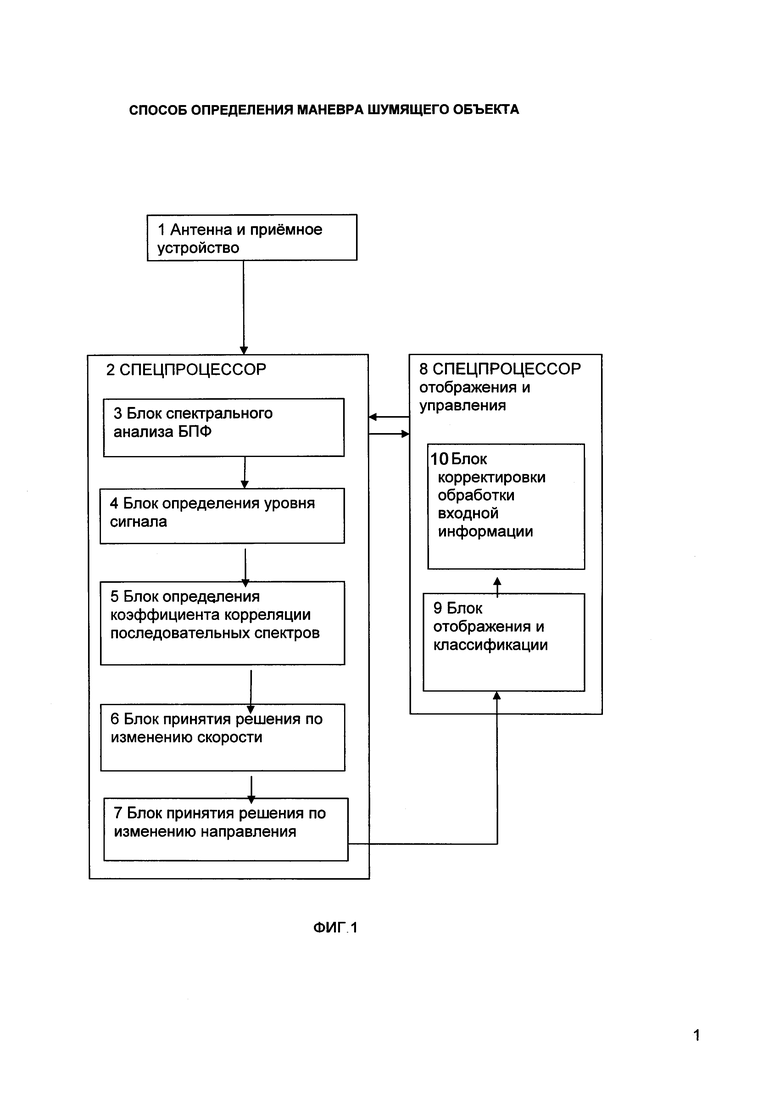
Сущность изобретения поясняется фиг. 1, на которой приведена блок схема устройства, реализующая предлагаемый способ.
Устройство содержит антенну 1, которая совместно с приемным устройством соединена со спецпроцессором обработки 2, в состав которого входят последовательно соединенные блок 3 спектрального анализа БПФ, блок 4 определения уровня сигнала, блок 5 определения коэффициента корреляции последовательных спектров, блок 6 принятия решения об изменении скорости, блок 7 принятия решения об изменения направления. Первый выход спецпроцессора 2 соединен двухсторонней связью с блоком 8 спецпроцессора отображения и управления. Второй выход спецпроцессора 2 соединен с блоком 9 отображения и классификации и блоком 10 корректировки обработки входной информации.
Антенна и приемное устройство 1 являются известными устройствами, которые используются в прототипе. Алгоритмы определения спектров на основе быстрого преобразования Фурье достаточно подробно изложены («Применение цифровой обработки сигналов» М., Мир, 1980 г., под. редакцией Э. Оппенгейма, стр. 441-463). В современной гидроакустической аппаратуре сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». СПб: Наука, 2004 г., стр. 164-176, 278-295). В процессоре реализуются все блоки предлагаемого устройства, такие как спектральная обработка на основе БПФ, корреляционная обработка, блоки памяти, процедуры сравнения, накопления, принятия решения и корректировки. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб: «БХВ - Петербург», 2011 г.).
С помощью предлагаемого устройства предложенный способ осуществляется следующим образом. Сигнал шумоизлучения обнаруженного движущегося объекта принимается антенной 1, усиливается, преобразуется в цифровой вид и подается на спецпроцессор обработки 2. В блоке 3 производится спектральный анализ поступившей временной реализации входного шумящего процесса. Спектральный анализ производится в известных частотных диапазонах. Для определения маневра выбирается высокочастотный диапазон, что в соответствии с имеющимися экспериментальными данными характеризует наиболее изменчивую особенность спектров движущихся объектов. Поскольку целью предлагаемого способа является определение маневра объекта шумоизлучения, то необходимым условием является обработка последовательных спектров. При накоплении происходит сглаживание быстрых спектральных изменений. Для работы способа используется уровень сигнала шумоизлучения объекта, который определяется в блоке 4 как сумма спектральных составляющих обрабатываемого частотного диапазона. В блоке 5 производится определение коэффициента корреляции между последовательными спектрами. Измеренные уровни сигналов и измеренные коэффициенты корреляции поступают в блок 6 принятия решения об изменении скорости и далее в блок 7 принятия решения о изменении направления движения. В блоках 6 и 7 по результатам экспериментальных данных определяются пороги по величине изменения уровня сигнала и величине изменения коэффициента корреляции. Результаты принятия решения поступают на спецпроцессор 8, в составе которого находится блок отображения и классификации.
Таким образом, используя последовательную корреляционную обработку, спектров можно автоматически оценить степень стационарности входного процесса и принять решение о проведении источником шумоизлучения маневра по скорости или по направлению движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| Способ обработки сигнала шумоизлучения цели | 2022 |
|
RU2776442C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2572219C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2555194C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ определения маневра шумящего объекта | 2019 |
|
RU2719626C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2570430C1 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
| Способ обработки сигнала шумоизлучения | 2022 |
|
RU2799118C1 |
Настоящее изобретение относится к области гидроакустики и может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах и определения параметров движения обнаруженного объекта. Используя последовательную корреляционную обработку спектров можно автоматически оценить степень стационарности входного процесса и принять решение о проведении источником шумоизлучения маневра по скорости или по направлению движения. 1 ил.
Способ определения маневра шумящего объекта, содержащий прием временной последовательности сигнала шумоизлучения, дискретизацию принятой временной последовательности, набор отсчетов временной последовательности, спектральный анализ на основе быстрого преобразования Фурье, последовательное накопление энергетических спектров и представление результата на индикатор, отличающийся тем, что обработку сигнала производят в высокочастотном диапазоне принятого сигнала шумоизлучения при минимальном времени накоплении, запоминают первый накопленный энергетический спектр первых наборов временной последовательности, определяют энергию сигнала шумоизлучения как сумму амплитуд спектральных составляющих каждого набора, определяют коэффициент корреляции между энергетическим спектром первого набора и энергетическим спектром каждого следующего набора, запоминают коэффициенты корреляции при каждом очередном накоплении, сравнивают коэффициенты корреляции и при увеличении коэффициента корреляции и снижении уровня энергии сигнала в последовательных накопленных спектрах принимают решение, что цель снизила скорость движения, при уменьшении коэффициента корреляции и при увеличении энергии сигнала шумоизлучения принимают решение, что цель увеличила скорость движения, а если уровень энергии сигнала не изменился, а коэффициента корреляции уменьшился, то принимают решение, что цель изменила направление движения.
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ЗВУКА, ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО УГЛА НА ИСТОЧНИК И ГОРИЗОНТА ИСТОЧНИКА ЗВУКА В МЕЛКОМ МОРЕ | 2011 |
|
RU2488133C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| US20090257312 A1, 15.10.2009 | |||
| JP2001330659 A, 30.11.2001. | |||

