Объектом изобретения является способ радиолокации подвижных объектов - источников радиосигнала на дорожной сети. Предлагаемый способ относится к области радиолокации и радионавигации, поскольку класс задач такого типа лежит в основе определения оценок местоположения объектов.
Известен способ радиолокации объектов - источников радиосигнала на плоскости [1]. Его недостатком является необходимость измерения углов прихода электромагнитных волн (пеленгов) из двух разнесенных в пространстве измерительных пунктов, положение которых известно. Такой способ не обеспечивает однозначного определения оценки местоположения в случае выхода из строя одного из пеленгаторов.
Известен также способ радиолокации объектов - источников радиосигнала на плоскости [2], заключающийся в измерении углов прихода электромагнитных волн (пеленгов) из двух разнесенных в пространстве измерительных пунктов, положение которых известно, определении координат местоположения объекта как точки пересечения линий положения, соответствующих измеренным пеленгам. Он также ориентирован на обязательное использование двух разнесенных пеленгаторов радиоизлучения и теряет свою работоспособность при выходе из строя одного из них.
Известен способ однопозиционной радиолокации подвижных объектов на дорожной сети [3], заключающийся в измерении угла прихода электромагнитной волны (пеленга) от объекта по сигналу, содержащему его опознавательный код, из одного измерительного пункта, положение которого известно, и измерении скорости перемещения объекта вдоль элемента дорожной сети, передаче сигнала, пропорционального измеренной скорости по радиоканалу передачи данных на измерительный пункт, повторном измерении пеленга через заданный интервал времени, определении длины пройденного за это время объектом пути, определении значений натурального параметра, соответствующих точкам пересечения линии положения для измеренного пеленга и элементов дорожной сети, определении возможных значений пеленгов, соответствующих перемещению объекта на рассчитанное расстояние, определении из условия минимального рассогласования между ними и повторно измеренным пеленгом номера элемента дорожной сети, на котором находится объект, и определении координаты местоположения объекта как координаты точки пересечения линии положения, соответствующей измеренному пеленгу, и выбранного элемента дорожной сети.
В большинстве случаев он обеспечивает возможность однозначного местоопределения подвижного объекта, привязанного к дорожной сети.
Вместе с тем, как показала практика, при определенных конфигурациях элементов дорожной сети его применение может приводить к множественным оценкам местоположения лоцируемого объекта. Структура указанных конфигураций предполагает наличие двух или более элементов дорожной сети, прогнозируемое перемещение объекта вдоль которых с измеренной скоростью из точек пересечения этих элементов с линией положения, соответствующей первому измерению пеленга, в течение заданного интервала времени после проведения такого измерения приводит к одному и тому же расчетному приращению пеленга.
Покажем это на примере.
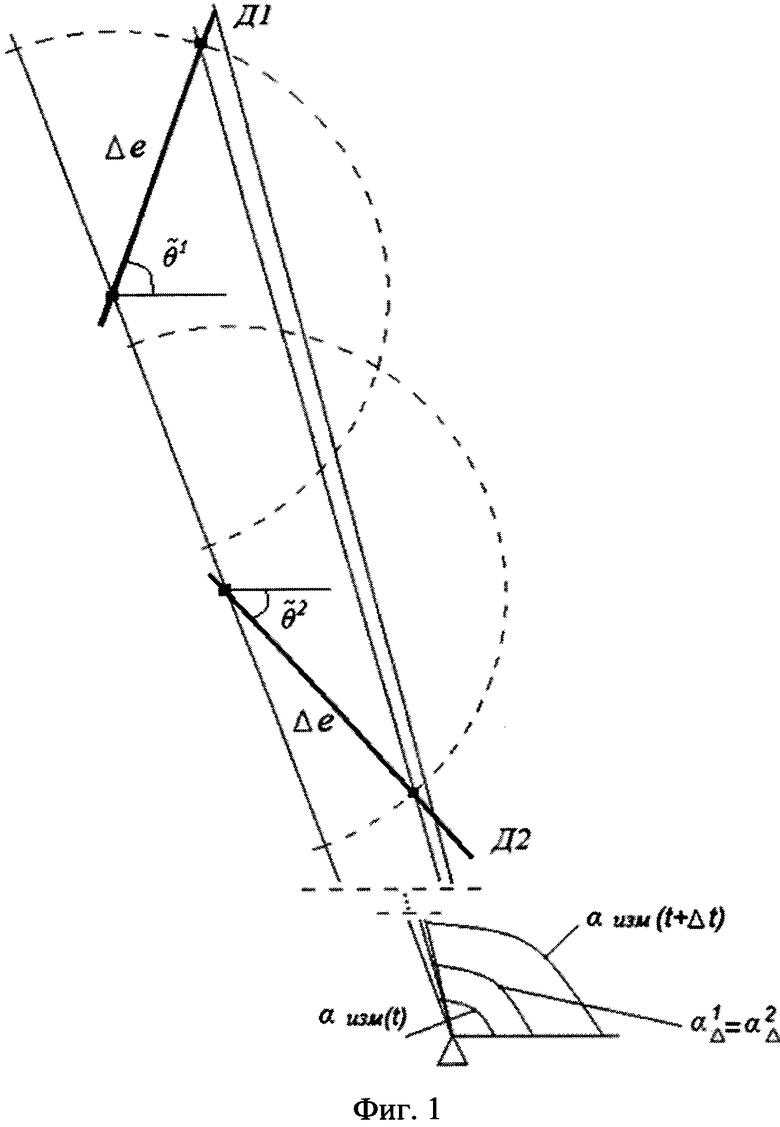
Рассмотрим фрагмент дорожной сети, представленный двумя ее элементами Д1 и Д2 (Фиг. 1). Пусть пеленги αизм(t), αизм(t+Δt), определенные в одном измерительном пункте в моменты времени соответственно t и t+Δt, соответствуют углам прихода электромагнитной волны (Фиг. 1), a νизм - измеренная на объекте в момент времени t и переданная на измерительный пункт величина скорости перемещения объекта вдоль элемента дорожной сети. Прогнозируемая длина пройденного за время Δt пути определяется как Δe=Δtνизм. В соответствии со способом [3] по измеренному пеленгу αизм(t) и параметрическим моделям пеленга αi(e), i=1,2, заданным в функции натурального параметра для каждого элемента дорожной сети, определяют значения натурального параметра  , соответствующие точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, и для каждого из этих элементов определяют возможные значения пеленгов
, соответствующие точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, и для каждого из этих элементов определяют возможные значения пеленгов  i=1, 2, соответствующие перемещению объекта на расстояние Δe. В соответствии с рассматриваемым способом решение о том, на каком элементе дорожной сети находится объект, принимается по результатам сравнения значений αизм(t+Δt) и
i=1, 2, соответствующие перемещению объекта на расстояние Δe. В соответствии с рассматриваемым способом решение о том, на каком элементе дорожной сети находится объект, принимается по результатам сравнения значений αизм(t+Δt) и  i=1, 2. Решение принимается в пользу того элемента дорожной сети, для которого рассогласование
i=1, 2. Решение принимается в пользу того элемента дорожной сети, для которого рассогласование  меньше.
меньше.
Однако конфигурация фрагментов дорожной сети может быть такой, что для различных ее элементов (см. Фиг. 1) значения  и
и  оказываются одинаковыми. В этом случае
оказываются одинаковыми. В этом случае  и выбор между Д1 и Д2 становится невозможным, а оценка координат лоцируемого объекта оказывается множественной, т.е. координаты местоположения объекта равновероятно могут находиться в точке пересечения линии положения, соответствующей αизм(t) (αизм(t+Δt)) либо с Д1, либо с Д2.
и выбор между Д1 и Д2 становится невозможным, а оценка координат лоцируемого объекта оказывается множественной, т.е. координаты местоположения объекта равновероятно могут находиться в точке пересечения линии положения, соответствующей αизм(t) (αизм(t+Δt)) либо с Д1, либо с Д2.
Уйти от подобных ситуаций возможно за счет привлечения дополнительного информационного признака, связанного с углом наклона касательной к элементу дорожной сети (угла наклона продольной оси объекта - транспортного средства, направленной вдоль касательной к элементу дорожной сети), на котором объект находится.
Цель изобретения: расширение множества возможных конфигураций элементов дорожной сети, для которых обеспечивается возможность однозначного местоопределения привязанного к ней подвижного объекта на основе:
- дополнительно проводимого автономного измерения на объекте в момент времени t угла наклона касательной к элементу дорожной сети (угла наклона продольной оси объекта, направленной вдоль касательной к элементу дорожной сети);
- кодирования сигнала, пропорционального измеренному углу наклона касательной к элементу дорожной сети;
- передачи полученного кода по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значения измеренного угла наклона касательной к элементу дорожной сети.
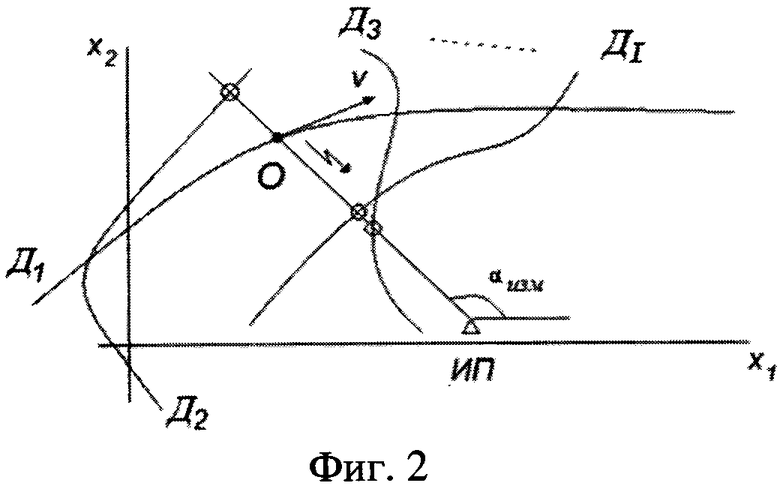
Сущность изобретения состоит в следующем. Каждый элемент дорожной сети описывают параметрической зависимостью (Фиг. 2)

где I - количество элементов дорожной сети; е - имеет смысл натурального параметра или длины пути [4-7].
К форме (1) можно приближенно перейти, если описание элементов дорожной сети задано в виде массивов

используемых, в частности, при формировании электронных карт. В этом случае

где

Из (2), (3) следует дискретный аналог (1)

на основании которого возможно приближенное представление (1).
Для каждого элемента дорожной сети заранее рассчитывают:
- зависимость значений пеленга от натурального параметра

где  - координаты измерительного пункта;
- координаты измерительного пункта;
- зависимость значений угла наклона касательной к элементу дорожной сети от натурального параметра

где 
Соотношения (6), (7) составляют преобразованные априорные данные о структуре дорожной сети. Отметим, что характеристики (6), (7) в совокупности являются уникальными и каждая их пара описывает соответствующий элемент дорожной сети.
Проводимые измерения:
- αизм(t), αизм(t+Δt) _ пеленги объекта в моменты времени соответственно t и (t+Δt), определяемые из одной пространственной точки, в которой расположен измерительный пункт;
- νизм - скорость перемещения объекта вдоль дороги, величина которой на [t, t+Δt], полагается неизменной;
- θизм - угол наклона касательной к элементу дорожной сети, на котором находится объект (угол наклона продольной оси объекта, направленной вдоль касательной к элементу дорожной сети). Значение θизм на [t, t+Δt], полагается неизменным.
Отметим, что пеленги αизм(t), αизм(t+Δt) определяют на измерительном пункте по сигналу, излучаемому объектом, и содержащему его опознавательный код. Скорость νизм и угол наклона касательной к элементу дорожной сети θизм определяют на объекте, пропорциональные им сигналы кодируют, полученные коды передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования определяют значения измеренной скорости и угла наклона касательной к элементу дорожной сети.
По измеренному пеленгу αизм(t) из решения уравнений

для элементов дорожной сети определяют множество корней

соответствующих множеству оценок возможного местоположения объекта

Координаты (10) определяют точки пересечения линии положения пеленгатора, соответствующей пеленгу αизм(t), и элементов дорожной сети (Фиг. 2).
Покажем, что дополнительное измерение угла наклона касательной к элементу дорожной сети θизм(t)=θизм, на котором находится объект, расширяет по сравнению с [3] множество возможных конфигураций элементов дорожной сети, для которых обеспечивается однозначное местоопределение привязанного к ней подвижного объекта.
После кодирования сигналов, пропорциональных νизм и θизм, передачи полученных кодов по радиоканалу передачи данных от объекта на измерительный пункт, приема и декодирования определяют:
- значение приращения натурального параметра или путь, пройденный объектом за время Δt

- множество возможных значений пеленгов, соответствующих моменту времени (t+Δt)

- множество возможных значений углов наклона касательных к элементам дорожной сети

в точках пересечения линии положения, соответствующей αизм(t), с указанными элементами.
В большинстве случаев значения (12), (13) для различных элементов дорожной сети отличаются друг от друга. Если для двух или более элементов дорожной сети, как было показано ранее в примере, значения (12) совпадают, то для этих же элементов различными будут значения углов наклона (13) (см. пример на Фиг. 1: ).
).
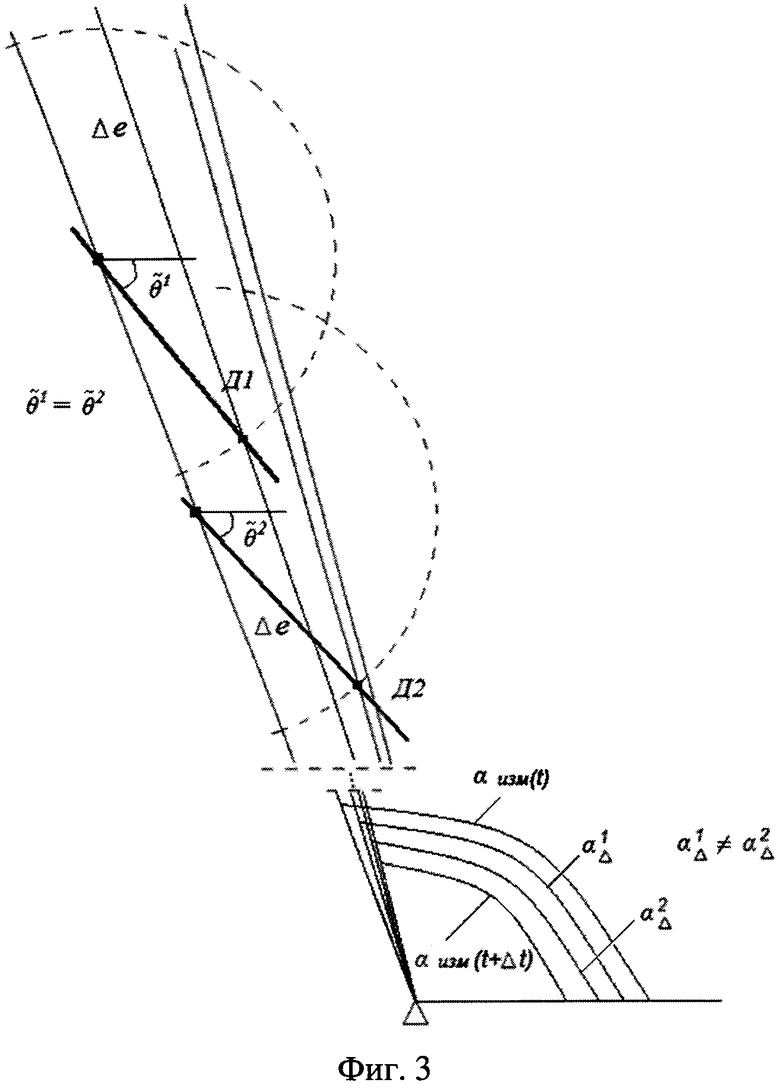
Если для двух или более элементов дорожной сети совпадают значения углов наклона (13), то для этих же элементов различными будут значения (12) (Фиг. 3).
Принятие решения о местоположении объекта осуществляют в результате сравнения для каждого элемента дорожной сети расчетных значений пеленгов, определяемых из (12), и измеренного значения пеленга αизм(t+Δt), идентифицированного по опознавательному коду с объектом, расчетных углов наклона касательных к элементам дорожной сети, определяемых из (13), и измеренного значения θизм угла наклона касательной к элементу дорожной сети, на котором находится объект. Для этого определяют


При выполнении условий q=1, r=1 элементы дорожной сети являются различимыми как по пеленгам α, так и по углам наклона касательных к этим элементам.
Выполнение условия

подразумевает наличие для t+Δt в заданной конфигурации дорожной сети q ее элементов, для которых расчетные значения пеленгов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I квадратов отклонений.
Выполнение условия

подразумевает наличие в заданной конфигурации дорожной сети r ее элементов, для которых значения углов наклона касательных для t являются одинаковыми, а квадраты их отклонений от измеренного значения угла наклона касательной к элементу дорожной сети, на котором находится объект, являются наименьшими для всей совокупности из I квадратов отклонений.
В множествах  и
и  содержится только один общий элемент. Его определение осуществляется с помощью соотношения
содержится только один общий элемент. Его определение осуществляется с помощью соотношения

где wα, wθ∈R1; элементы векторов wα, wθ равны нулю за исключением элементов соответственно и . Например, если I=5, q=2, r=4, и

то

Множества (19) имеют один общий элемент очевидно определяемый из (18), т.е. i*=4.
Таким образом, оценку местоположения объекта определяют как

Необходимо отметить, что автономные измерения (измерения νизм и θизм) с последующим кодированием сигналов, пропорциональных νизм и θизм, передачей полученных кодов по радиоканалу передачи данных на измерительный пункт носят фрагментарный характер. Их проводят лишь в начале процесса сопровождения объекта и после того, как объект минует какую-либо точку пересечения элементов дорожной сети. Как только задача различения оказывается решенной (определен элемент дорожной сети, на котором находится объект), дальнейшее сопровождение может проводиться лишь по результатам измерений пеленга.
Сравнительный анализ заявляемого способа и известного способа локации местоположения объекта на плоскости.
1. В заявляемом способе дополнительно проводят автономное измерение на объекте в момент времени t угла наклона касательной к элементу дорожной сети, на котором находится объект (угла наклона продольной оси объекта, направленной вдоль касательной к элементу дорожной сети);
2. В заявляемом способе сигнал, пропорциональный измеренному углу наклона касательной к элементу дорожной сети, на котором находится объект, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования определяют значение измеренного угла наклона касательной к элементу дорожной сети.
3. В заявляемом способе принятие решения о номере элемента дорожной сети, на котором находится объект (различение элементов дорожной сети), осуществляют на основе совместного использования признаков, связанных как со сравнением расчетных значений пеленгов для различных элементов дорожной сети с измеренным, так и со сравнением расчетных углов наклона касательных к элементам дорожной сети с измеренным.
Технический эффект от применения предлагаемого способа по сравнению с [3] состоит в расширении множества возможных конфигураций элементов дорожной сети, для которых обеспечивается возможность однозначного местоопределения привязанного к ней подвижного объекта за счет включения в него таких конфигураций элементов дорожной сети, для которых расчетные значения пеленгов являются одинаковыми.
Структурная схема устройства, реализующего способ однопозиционной радиолокации подвижных объектов на дорожной сети, представлена на Фиг. 4.
На Фиг. 4 использованы следующие обозначения: 1 - подвижный объект, включающий 11 - блок измерения скорости (спидометр), 12 - блок кодирования и передачи радиосигналов, 13 - блок измерения угла наклона касательной к элементу дорожной сети (гирокомпас, электронный компас); 2 - блок приема радиосигналов и декодирования - пеленгатор; 3 - усилитель с коэффициентом усиления kу=Δt; 4 - блок определения значений натурального параметра, для точек пересечения линии положения пеленгатора, соответствующей αизм(t), и элементов дорожной сети; 5 - блок суммирования; 6 - блок определения расчетных значений пеленга; 7 - блок сравнения расчетных пеленгов с измеренным αизм(t+Δt); 8 - блок определения расчетных значений углов наклона касательных к элементам дорожной сети в точках их пересечения с линией положения, соответствующей αизм(t); 9 - блок сравнения расчетных значений углов наклона касательных к элементам дорожной сети с измеренным углом θизм(t)=θизм; 10 - блок выбора значения натурального параметра; 11 -блок определения номера элемента дорожной сети; 12 - блок оценки координат местоположения объекта.
На объекте 1 в блоке 11 в момент времени t осуществляют измерение скорости перемещения объекта вдоль элемента дорожной сети, а в блоке 13 проводят измерение угла наклона касательной к элементу дорожной сети. Результат измерений с выходов блоков 11, 13 передают на входы 121, 122 соответственно блока кодирования и передачи радиосигналов 12. Далее с выхода блока 12 радиосигнал, содержащий код скорости перемещения объекта вдоль элемента дорожной сети, код угла наклона касательной к элементу дорожной сети и код объекта, по радиоканалу передачи данных передают на вход блока 2 приема радиосигналов и декодирования - пеленгатора. Блок 12 обеспечивает излучение радиосигнала непрерывно, поддерживая функционирование радиоканала. В блоке 2 на основании обработки с учетом опознавательного кода объекта осуществляют выделение сигналов, пропорциональных измеренной на объекте скорости и углу наклона касательной к элементу дорожной сети, соответствующих моменту времени t, и определяют значения пеленгов αизм(t), αизм(t+Δt) объекта. Сигнал, пропорциональный αизм(t), с выхода 22 подают на вход блока 4 определения значений натурального параметра, для точек пересечения линии положения пеленгатора, соответствующей αизм(t), и элементов дорожной сети. Функционирование блока 4 осуществляется в соответствии с (6), (8), (9). Сигнал, пропорциональный νизм, с выхода 23 блока 2 подают на вход усилителя 3, на выходе которого, в свою очередь, в соответствии с (11) формируется сигнал, пропорциональный оценке пройденного за Δt пути. Сигнал, пропорциональный оценке пройденного за Δt пути, с выхода блока 3 подают на вход 50 блока 5 суммирования. В блоке 5 оценку пройденного пути суммируют со значениями натурального параметра, которые с выходов 41…4I блока 4 подают на входы 51…5I блока 5. Прогнозируемые значения натуральных параметров для каждого элемента дорожной сети с выходов 5I+1…52I поступают соответственно на входы 61…6I блока 6 определения расчетных значений пеленга. Возможные для каждого элемента дорожной сети значения пеленга для t+Δt рассчитывают в соответствии с (6), (12). Указанные значения с выходов 6I+1...62I блока 6 поступают на входы 71…7I блока 7 сравнения. В блоке 7 рассчитанные для каждого элемента дорожной сети значения пеленга сравнивают с измеренным значением пеленга αизм(t+Δt) объекта, соответствующего установленному опознавательному коду, поступающим на вход 70 блока 7 с выхода 21 блока 2. Сравнение осуществляют в соответствии с правилом (14). Его результатом являются сигналы на выходах 7I+1, …, 72I. Сигнал на каждом i-м выходе 7I+1

Значения натурального параметра с выходов 41…4I блока 4 подают на входы 81,…,8I блока 8 определения расчетных значений углов. Определенные в блоке 8 расчетные значения углов наклона касательных к элементам дорожной сети с его выходов 8I+1,…,82I поступают на входы 91,…,9I блока сравнения 9. В блоке 9 рассчитанные для каждого элемента дорожной сети значения угла наклона касательной сравниваются с измеренным значением угла θизм(t)=θизм, поступающим на вход 90 блока 9 с выхода 24 блока 2. Сравнение осуществляют в соответствии с правилом (15). Его результатом являются сигналы на выходах 9I+1,…,92I. Сигнал на каждом i-м выходе  либо пропорционален индексу i элемента дорожной сети, если индекс входит в множество (15), определяющее индексы элементов дорожной сети, для которых расчетные значения углов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I квадратов отклонений, либо равны нулю в противном случае. Сигналы с выходов 9I+1,…,92I блока 9 и выходов 7I+1,…,72I блока 7 подаются соответственно на входы 111,…,11I и 11I+1,…,112I блока 11. Определение номера элемента дорожной сети в блоке 11 осуществляется в соответствии с (18). Сигнал, пропорциональный номеру элемента дорожной сети, с выхода блока 11 поступает вход 100 блока 10 и вход 122 блока 12. В блоке 10 из значений натурального параметра, поступающих на входы 101…10I с выходов 41…4I блока 4, проводят выбор такого его значения, которое соответствует определенному в блоке 22 индексу. Сигнал, пропорциональный выбранному значению натурального параметра, с выхода блока 10 поступает на вход 121 блока 12. В блоке 12 в соответствии с (15) проводят определение координат местоположения объекта.
либо пропорционален индексу i элемента дорожной сети, если индекс входит в множество (15), определяющее индексы элементов дорожной сети, для которых расчетные значения углов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I квадратов отклонений, либо равны нулю в противном случае. Сигналы с выходов 9I+1,…,92I блока 9 и выходов 7I+1,…,72I блока 7 подаются соответственно на входы 111,…,11I и 11I+1,…,112I блока 11. Определение номера элемента дорожной сети в блоке 11 осуществляется в соответствии с (18). Сигнал, пропорциональный номеру элемента дорожной сети, с выхода блока 11 поступает вход 100 блока 10 и вход 122 блока 12. В блоке 10 из значений натурального параметра, поступающих на входы 101…10I с выходов 41…4I блока 4, проводят выбор такого его значения, которое соответствует определенному в блоке 22 индексу. Сигнал, пропорциональный выбранному значению натурального параметра, с выхода блока 10 поступает на вход 121 блока 12. В блоке 12 в соответствии с (15) проводят определение координат местоположения объекта.
Источники информации
1. Радиотехнические системы / под ред. Ю.М. Казаринова. М.: Академия. 2008.
2. Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986.
3. Патент 2524482 Российская Федерация, МПК G01S 5/00. Способ однопозиционной радиолокации подвижных объектов на дорожной сети / Хуторцев В.В., Бережная В.В., №2013130454; заявл. 02.07.2013; опубл. 27.07.2014.
4. Дубровин Б.А., Новиков С.П., Фоменко А.Т. Современная геометрия: Методы и приложения. М.: Наука, 1986. 760 с.
5. Хуторцев В.В. Принципы пространственно-дифференциальной фильтрации параметров траекторий объектов, движущихся вдоль одномерных многообразий // Радиотехника и электроника. 1993. Т. 38. №6. С. 1026-1036.
6. Хуторцев В.В. Пространственно-дифференциальная фильтрация марковских процессов на одномерных стохастических многообразиях // Автоматика и телемеханика. 1994. Т. 8. №6. С. 117-125.
7. Хуторцев В.В. Принципы пространственно-дифференциальной адаптивной фильтрации марковских процессов на одномерных многообразиях // Радиотехника и электроника. 1994. Т. 39. №8. С. 1637-1646.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2013 |
|
RU2524482C1 |
| Способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети | 2017 |
|
RU2666553C1 |
| Латерационный способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети | 2019 |
|
RU2703258C1 |
| СПОСОБ РАДИОЛОКАЦИИ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2014 |
|
RU2545526C1 |
| Способ измерения параметров движения объекта активным локатором | 2020 |
|
RU2759199C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОЧАГОВ ЗЕМЛЕТРЯСЕНИЙ СЕТЬЮ СЕЙСМОСТАНЦИЙ | 2011 |
|
RU2463631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2022 |
|
RU2792013C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2469890C2 |
| СПОСОБ СОВМЕСТНОГО МОНОИМПУЛЬСНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ПРИНИМАЕМОГО СИГНАЛА И ПЕЛЕНГА ИСТОЧНИКА ЭТОГО СИГНАЛА | 2012 |
|
RU2492500C1 |
Способ относится к радиолокации и радионавигации и предназначен для определения оценок местоположения подвижных источников радиосигнала на дорожной сети. Достигаемый технический результат - расширение возможностей обеспечения однозначного местоопределения подвижного объекта на множестве возможных конфигураций дорожной сети. Указанный результат достигается за счет того, что в различные моменты времени из одного измерительного пункта, положение которого известно, измеряют углы прихода электромагнитной волны (пеленги) по сигналам, излучаемым подвижным источником радиосигнала и содержащим его опознавательный код. Одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют скорость его перемещения вдоль элемента дорожной сети. Сигнал, пропорциональный измеренной скорости, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренной скорости. Определяют длину пройденного пути за время Δt. По измеренному пеленгу αизм(t) и параметрическим моделям пеленга, заданным в функции натурального параметра для каждого элемента дорожной сети, определяют значения натурального параметра, соответствующие точкам пересечения линии положения для измеренного пеленга и элементов дорожной сети. Для каждого из этих элементов определяют расчетные значения пеленгов, соответствующие перемещению подвижного источника радиосигнала на соответствующее расстояние. Из условия минимального рассогласования между ними и повторно измеренным пеленгом αизм(t+Δt) определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала. Одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети, на котором находится подвижный источник радиосигнала. Сигнал, пропорциональный измеренному углу, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла. По параметрическим моделям углов наклона касательных к элементам дорожной сети, заданным в функции натурального параметра, для каждого элемента дорожной сети и значениям натурального параметра, соответствующим точкам пересечения линии положения для измеренного пеленга и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона. Из условия минимального рассогласования между ними и измеренным углом наклона касательной к элементу дорожной сети определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала. Из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями пеленгов и повторно измеренным пеленгом, определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала. Соответствующие координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренному пеленгу (αизм(t) или αизм(t+Δt)), и выбранного элемента дорожной сети. 4 ил.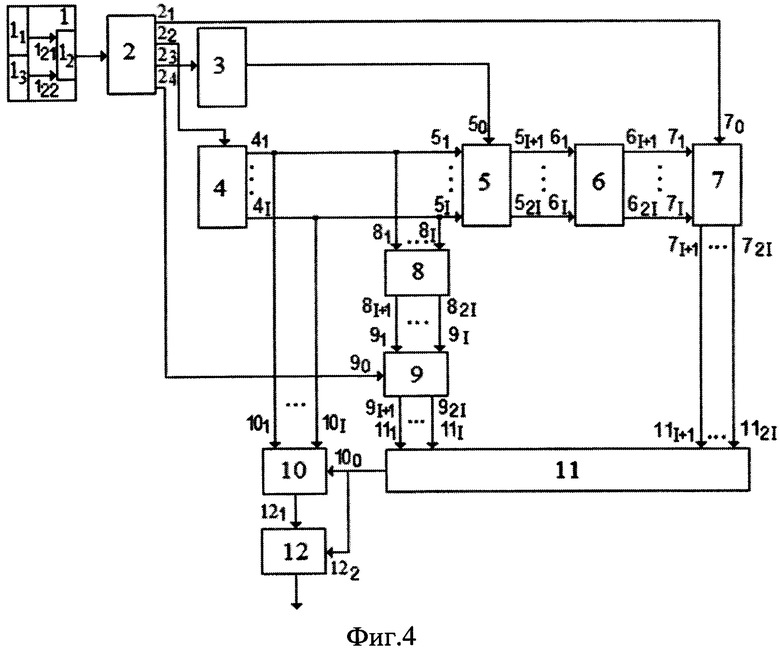
Способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети, заключающийся в измерении в различные моменты времени из одного измерительного пункта, положение которого известно, углов прихода электромагнитной волны (пеленгов) αизм(t), αизм(t+Δt) по сигналам, излучаемым источником радиосигнала и содержащим его опознавательный код, одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют скорость νизм его перемещения вдоль элемента дорожной сети, сигнал, пропорциональный измеренной скорости, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренной скорости, определяют длину пройденного пути Δе=Δtνизм за время Δt, по измеренному пеленгу αизм(t) и параметрическим моделям пеленга  , заданным в функции натурального параметра для каждого элемента дорожной сети, определяют значения натурального параметра
, заданным в функции натурального параметра для каждого элемента дорожной сети, определяют значения натурального параметра  , соответствующие точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого из этих элементов определяют расчетные значения пеленгов
, соответствующие точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого из этих элементов определяют расчетные значения пеленгов  , соответствующие перемещению подвижного источника радиосигнала на расстояние Δе, и из условия минимального рассогласования между ними и повторно измеренным пеленгом αизм(t+Δt) определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренному пеленгу (αизм(t) или αизм(t+Δt)) и элемента дорожной сети, на котором находится подвижный источник радиосигнала, отличающийся тем, что одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети θизм, на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, по параметрическим моделям угла наклона касательных к элементам дорожной сети
, соответствующие перемещению подвижного источника радиосигнала на расстояние Δе, и из условия минимального рассогласования между ними и повторно измеренным пеленгом αизм(t+Δt) определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренному пеленгу (αизм(t) или αизм(t+Δt)) и элемента дорожной сети, на котором находится подвижный источник радиосигнала, отличающийся тем, что одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети θизм, на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, по параметрическим моделям угла наклона касательных к элементам дорожной сети  , заданным в функции натурального параметра, и значениям натурального параметра
, заданным в функции натурального параметра, и значениям натурального параметра  , соответствующим точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона
, соответствующим точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона  и из условия минимального рассогласования между ними и измеренным углом θизм определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями пеленгов и повторно измеренным пеленгом, определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала.
и из условия минимального рассогласования между ними и измеренным углом θизм определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями пеленгов и повторно измеренным пеленгом, определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала.
| СПОСОБ ОДНОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2013 |
|
RU2524482C1 |
| МАСЛОБОЙКА | 1922 |
|
SU10917A1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ | 2008 |
|
RU2374596C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| US 2010253548 A1, 07.10.2010 | |||
| DE 4415052 C2, 04.09.1997 | |||
| US 5650770 A, 22.07.1997. | |||

