Устройство работает следующим образом.
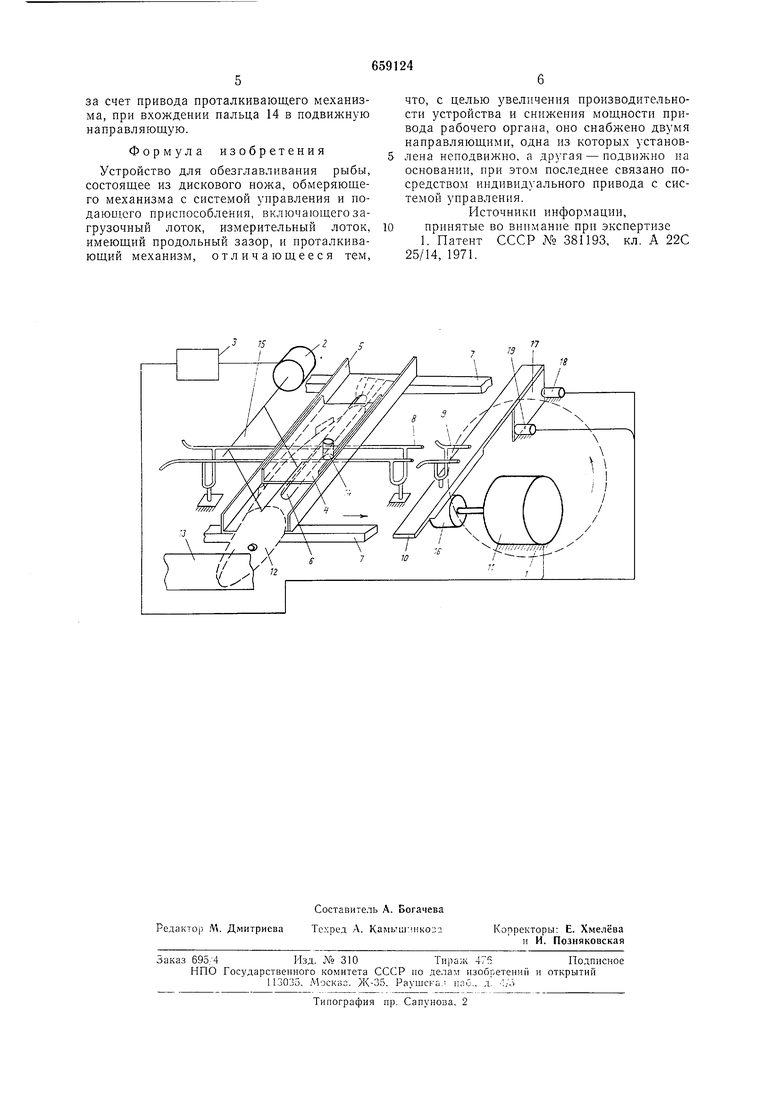
Подлежащая обезглавливанию рыба 12 укладывается в загрузочный лоток 4 с фиксацией головы в упорную планку 13, которая установлена таким образом, что концы жаберных крыщек среднестатистической рыбы данного вида располагаются в плоскости дискового ножа 1. Загрузочный и измерительный лотки 4 и 5 выполнены так, что минимальная по толщине рыба выступает над их загнутыми краями.
В зоне загрузки палец 14, соединенный с загрузочным лотком 4, расположен в неподвижной направляющей 8. При движении проталкивающего механизма 7 измерительный лоток вместе с загруженной в нем рыбой 12 проходит к обмеряющему механизму 2, который состоит из подпружиненной щторки 15, связанной с валом вращающегося трансформатора. Измеряемая рыба отклоняет щторку 15, поворачивая ротор вращающегося трансформатора, и полученный на его выходе сигнал, пропорциональный косинусу угла поворота ротора, подается в систему управления, где формируются управляющие сигналы на индивидуальный привод И подвижной направляющей в сторону «Вперед или «Назад в зависимости от величины измеряемой рыбы. Например, если измеряемая рыба больше средней, то привод перемещает подвижную направляющую «Вперед на необходимую величину, причем перемещение направляюп1,ей производится до подхода к ней лотка с рыбой. При движении ироталкиваюпего механизма 7 палец 14 выходит из неподвижной направляющей 8 и попадает в вилку подвижной направляющей, зафиксированной индивидуальным приводом 11 с помощью щестерни 16 в необходимом положении. При перемещении пальца 14 внутри направляющей 9 перемещается связанный с ним загрузочный лоток 4 внутри измерительного лотка 5 вместе с рыбой 12, ориентируя последнюю на экономичный рез головы.
В отработанном положении подвижная направляющая остается на время, необходимое для проведения технологической операции, обеспечиваемое задержками в системе управления. Возвращение рабочего органа в исходное среднее положение производится от индивидуального привода серии импульсов обратного чередования фаз.
Остановка индивидуального привода в среднем положении рабочего органа осуществляется с помощью датчика среднего положения рабочего органа, состоящего из щторки 17, закрепленной на подвижном основании 10, и двух конечных выключателей 18 и 19, выполненных в виде фотодиодов, взаимодействующих со шторкой 17 таким образом, что в среднем положении рабочего органа оба контакта конечных выключателей 18 и 19 разомкнуты, во всех положениях «Вперед замкнут контакт 18, а контакт 19 разомкнут и, наоборот, во всех положениях рабочего органа «Назад контакт 18 разомкнут, а контакт 19 замкнут.
Увеличение производительности устройства достигается путем использования индивидуального реверсивного привода рабочего органа, что позволяет установить рабочий орган в исходное положение, соответствующее обрабатываемому параметру (длине головы) среднестатистической рыбы, а установка привода в среднее положение позволяет сократить суммарный путь,
проходимый рабочим органом во время настроечных операций при обработке заданной партии рыбы, не менее чем в два раза, что подтверждается следующими соображениями.
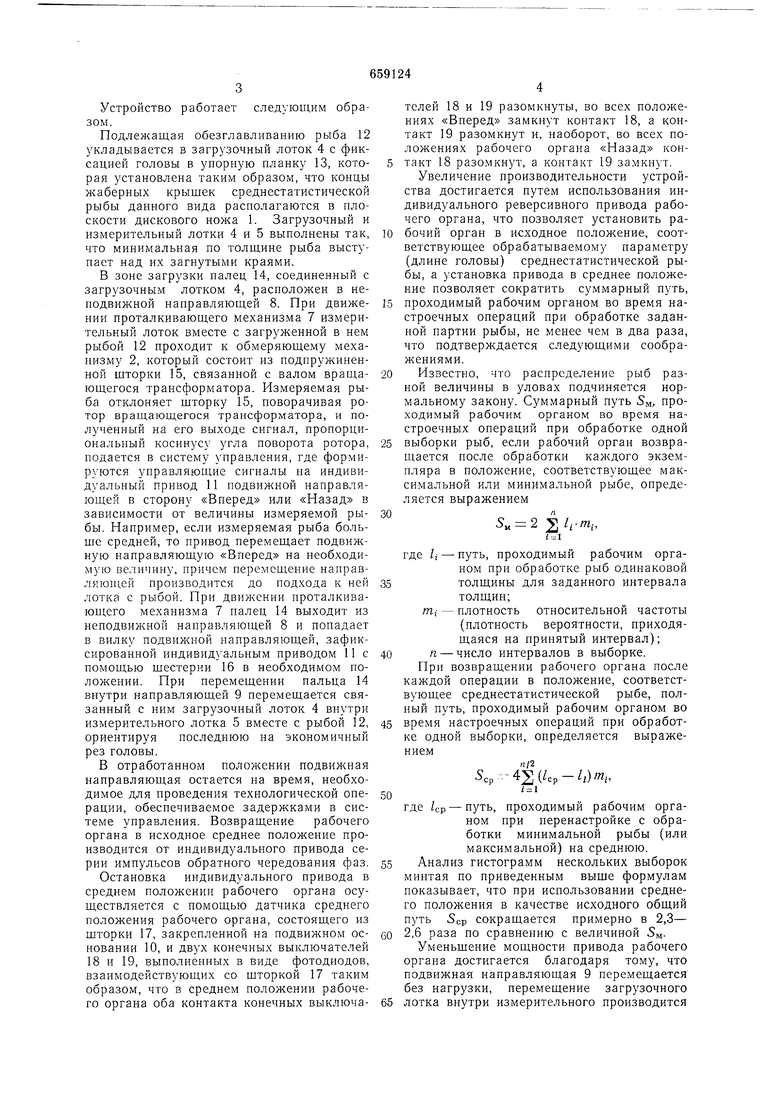
Известно, что распределение рыб разной величины в уловах подчиняется нормальному закону. Суммарный путь 5м, проходимый рабочим органом во время настроечных операций при обработке одной
выборки рыб, если рабочий оргаи возвращается после обработки каждого экземпляра в положение, соответствующее максимальной или минимальной рыбе, определяется выражением
5„
i I
где /i - путь, проходимый рабочим органом при обработке рыб одинаковой толщины для заданного интервала
толщин;
/п,- - плотность относительной частоты (плотность вероятности, приходящаяся на принятый интервал); п - число интервалов в выборке.
При возвращении рабочего органа после каждой операции в положение, соответствующее среднестатистической рыбе, полный путь, проходимый рабочим органом во время настроечных операций при обработке одной выборки, определяется выражением
5ср-42(/ср-/г)/«г,
где /ср - путь, проходимый рабочим органом при перенастройке с обработки минимальной рыбы (или максимальной) на среднюю. Анализ гистограмм нескольких выборок минтая по приведенным выше формулам показывает, что при использовании среднего положения в качестве исходного общий путь SCP сокращается примерно в 2,3- 2,6 раза по сравнению с величиной 5мУменьщение мощности привода рабочего
органа достигается благодаря тому, что
подвижная направляющая 9 перемещается
без нагрузки, перемещение загрузочного
лотка внутри измерительного производится
за счет привода проталкивающего механизма, при вхождении пальца 14 в подвижную направляющую.
Формула изобретения
Устройство для обезглавливания рыбы, состоящее из дискового ножа, обмеряющего механизма с системой управления и подаюисго приспособления, включающего загрузочный лоток, измерительный лоток, имеющий продольный зазор, и проталкивающий механизм, отличающееся тем.
что, с целью увеличения производительности устройства и снижения мощности привода рабочего органа, оно снабжено двумя направляющими, одна из которых установлена неподвижно, а другая - подвижно на основании, при этом последнее связано посредством индивидуального привода с системой управления.
Источники информации,
принятые во внимание при экспертизе
1. Патент СССР № 381193, кл. А 22С 25/14, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2014 |
|
RU2573362C1 |
| УСТРОЙСТВО для ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 1973 |
|
SU381193A1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2006 |
|
RU2320177C1 |
| Устройство для отрезания головы рыбы | 1975 |
|
SU599785A1 |
| Машина для разделки рыбы для консервов | 1938 |
|
SU59553A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Машина для разделки рыбы | 1979 |
|
SU961632A1 |
| Устройство для ориентированной подачи рыбы к режущим инструментам | 1990 |
|
SU1750581A1 |
| Устройство для разделки рыбы набАлыК | 1979 |
|
SU820778A1 |
, 7S
