тельными обмотками, включенными встречно. Выход каждого датчика 18 и 19 толщины рыбы подключен ко входам ячеек 23 н 24 намяти, запоминающих сигналы, пронорциональные максимальной толщине рыбы в районе головы и хвоста. Выходы ячеек 23 и 24 памяти через компаратор 25 подключены к реле переключения, например двухиозиционному поляризованному реле, имеющему три контактных группы 26, 27 и 28.
Посредством первой контактной группы 26 реле переключения выходы ячеек 23 и 24 намяти подключаются к системе 29 автоматической настройки рабочих органов 8 и 9 к ее информационному входу 30, которая состоит из вычислительного устройства 31, определяющего но максимальной толщине рыбы длину ее головы, преобразователя 32 аналоговой величины во временной интервал, коммутатора 33. Вход Я (назад) коммутатора 33 через конъюнктор 34 подключен к выходу преобразователя 32 и ко входу генератора 35 импульсов, а вход В (вперед) через конъюнктор 36 - к генератору 35 импульсов ко второму выходу элемента 37 задержки и посредством входа 38, являющимся входом управления системы, ко второй контактной группе 27 реле переключения. Вход элемента 37 задержки соединен с выходом нуль-органа 39, который Е свою очередь нодсоединен ко входу 30 системы, первый выход элемента 37 задержки соединен с выходом запуска преобразователя 32, а третий его выход - с ключами 40 сброса информации с запоминающих ячеек 23 и 24.
Через третью группу 28 контактов реле нереключения источник питания 41 подключается к реверсивному электронриводу 27 приспособления для нерсмещення рыбы в лотке и к щаговым электродвигателям 14 и 15 рабочих органов 8 и 9, которые кроме того, через усилитель 42 мощности подключены к коммутатору 33.
Датчики 18 и 19 толщины рыбы имеют одинаковую конструкцию и состоят из измерительного органа 20 или 21, выполненного в виде свободно висящей щторки, ось вращения которой связана с осью вращения, например, синусно-косинусного вращающегося трансформатора 43, статор которого иодключен к сети с нанряженнем, а косинусная роторная обмотка через выпрямитель 44 к одному из входов операционного усилителя 45. Другой вход операционного усилителя 45 подключен к источнику 46 опорного ианряжения.
Каждая из ячеек 23 и 24 памяти содержит запоминающую емкость 47, подключенную к выходу датчика 18 или 19 через диод 48, и ключ 40 сброса информации с емкости 47.
Работа устройства происходит следующим образом.
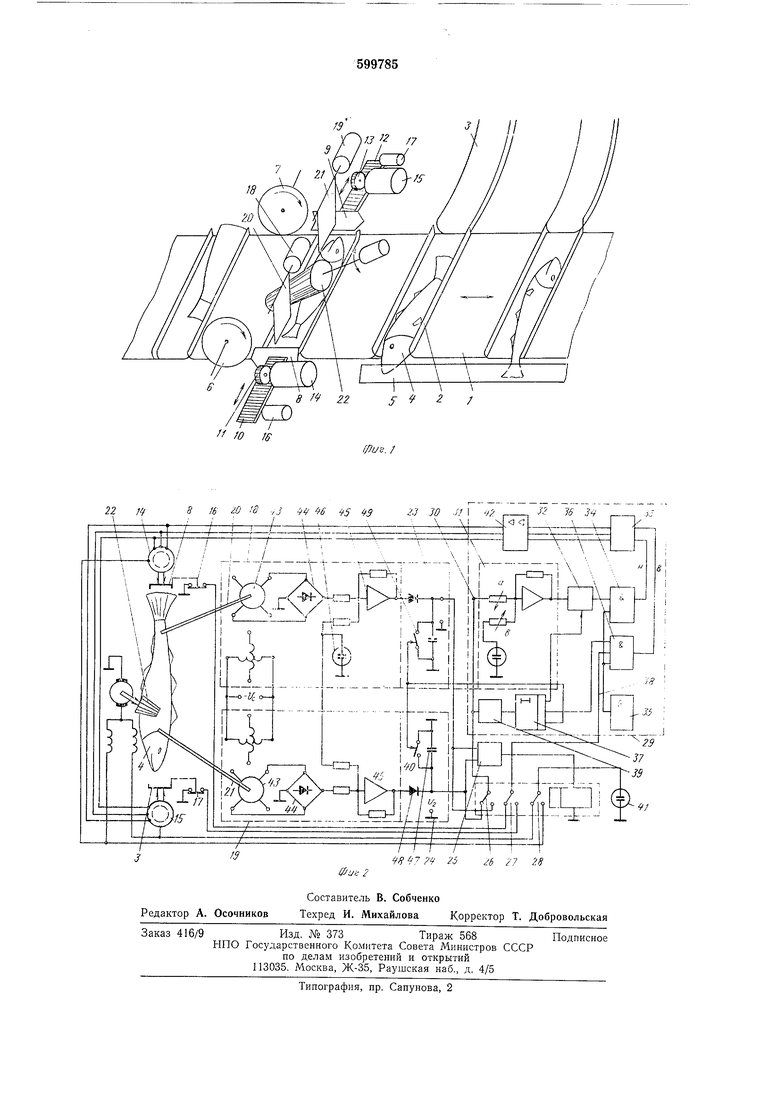
Рыба вручную или автоматически с иомощью иодштуч юго питателя ио направляющим 3 заиасовывается в лотки до уиора рылом или хвостом в подвижную унориую планку, установленную на таком расстоянии от кромки конвейера, чем обеспечивается ориентация дискового ножа 6 иод конец жаберной крыщки наименьщего из экземпляров рыб, запасованных головой под планку 5. По мере движения рыбы на конвейере датчиками 18 и 19 измеряется максимальная толщина рыбы в районе головы и хвоста.
Каждый из датчиков 18 и 19 выдает сигнал, иропорциоиальный текущей толщины рыбы-В, которая в свою очередь определяется выражением
B.R(-cosa), где R - радиус измерительной щторки;
ее - угол отклонения измерительной
шторки.
С помощью ячеек памяти 23 и 24 происходит выделение максимального значения сигиалов, снимаемых с датчиков 18 и 19.
В результате измерения толщины рыбы двумя датчиками 18 и 19 величина выходного сигнала t/g с ячейки 24 намяти подключенной к датчику 19, измерительный орган 21 которого расиоложен в районе головы рыбы,
превышает величину выходного сигнала f/i с ячейки памяти 23, подключенной к датчику 18, измерительный орган 20 которого расположен в районе хвоста рыбы.
Компаратор 25, подключенный к выходам
ячеек 23 н 24 памяти, нмеет такую характеристику, что ири нулевых сигналах на его входах 0 или сигналах, когдг , выходное напряжение компаратор 25 имеет положительную нолярность. ЕСЛР
сигналы , то выходной сигнал комиаратора 25 меняет полярность на обратную (отрицательную). Таким образом реле переключения, подключенное к выходу комнаратора 25, ири величинах сигналов, когда
не изменяет положения своих контактных групп 26, 27 и 28. В результате информационный вход 30 системы автоматической иастройки рабочих органов остается нодключенным к выходу ячейки памяти 24, конечный выключатель 17 остается подключенным ко входу 38 управления системы, а источник питания 41-к электроприводу 15 и реверсивному двигателю, обеспечивая вращение ролика в ту сторону, что происходит перемещеиие рыбы в лотке рылом к подвижному упору, когда она подходит к ролику.
При подаче сигнала U на вход системы с помощью вычислительного устройства 31 происходит пересчет максимальной толщины
рыбы бмакс в длину ГОЛОВЫ 1 согласно уравнения:
/l aBMaKo.-f б,
где а -коэффициент регрессии;
в - свободный член регрессии.
С номощью преобразователя 32, запускаемого в работу с помощью нуль-органа 39 через элемент 37 задержки (его второй выход) аналоговый сигнал с выхода вычислительного
блока 31 нреобразуется во время-импульсную форму. Преобразование временного интервала в пропорциональное число импульсов производится KOHbioiiKTOpoM 34 и генератором 35.
Частота генератора 35 импульсов устаназливается предварительно в зависимости от вида обрабатываемых рыб н определяется коэффициентом регрессии а. Пачки имиульсов с выхода конъюнктора 34 поступают на вход Я (назад) коммутатора 33 и через усилитель 42 мощности на шаговый двигатель 15, который перемещает рабочий орган 9 (подвижную упорную для головы рыбы планку), замыкая конечный выключатель 17. При подходе рыбы к ролику последний переMeutaeT рыбу до упора ее рыла в плапку. Затем рыба подходит к дисковому ножу 6 и обезглавливается прямым резом.
После окончания реза рыба с выхода элемента задержки на один из входов конъюнктора 36 поступает сигнал, который вместе с сигналами, поступающими с генератора 35, и сигналом с конечного выключателя 17 вызывает появление на выходе конъюнктора 36 импульсов, а следовательно, на входе В коммутатора 33.
Шаговый двигатель 15 возвращает рабочий орган 9 в исходное состояние, размыкая конечный выключатель 17 и прекращая подачу импульсов на вход В коммутатора. Следующим сигналом с элемента задержки 37 нроисходит сброс информации посредством ключей 40 с ячеек памяти 23 и 24. Устройство приходит в исходное состояние.
Если последующая рыба, поступающая на обработку, имеет противоположную ориентацию, т. е. под рабочим органом 20 находится голова рыбы, а под рабочим органом 19 ее хвост, то выходной сигнал t/i будет превышать сигнал U-i. Под действием отрицательного сигнала с компаратора 25 поляризованное реле переключения сбрасывая, изменяет состояние контактных групп 26, 27 и 28 на обратное. В результате к информационному входу 30 системы подключаются конечный выключатель 16, а источник питания 41 подключается к электроприводу 14 и к электродвигателю приспособления 22 для перемещения рыбы, который вращает ролик в противоположную сторону (сравнительно с описанным
выше случаем), обеспечивая перемещение рыбы до упора се рыла в рабочий орган 8, когда рыба подойдет к ролику. Дальнейщая работа устройства полностью аналогична, но в работе участвуют дисковый нож 7 и конечный выключатель 16.
При сбросе информации с ячеек 23 и 24 памяти контактные группы 26, 27 и 28 поляризованного реле переключения возвращаются в исходное состояние.
Техиико-экономическое преимущество предлагаемого решения определяется следующими обстоятельствами: известное устройство для настройки на экономичное отрезание головы рыбы требует либо ручной занасовки рыбы в лотки, либо специальных устройств, ориентирующих рыбу, наиример, головой в одну сторону.
Предлагаемое устройство благодаря независнмостн от способа ориентации рыбы более универсально, не требует специальных ориентаторов, что в случае его использования в линии автоматической разделки рыбы снижает стоимость II габариты линии, обеспечивая тем самым значительный экономический эффект.
Формула изобретения
Устройство для отрезания головы рыбы, содержащее подающий транспортер, приспособление для перемещения рыбы с приводом, дисковый нож, обмеряющий механизм с системой управления, связанной с дисковым ножом, датчик и рабочий орган, отличающееся тем, что, с целью обезглавливания рыбы, не ориентированной при запасовке ее в лотки, оно снабжено дополнительно дисковым , датчиком, рабочим органом, конечными выключателями, системами управления рабочими органами и реле переключения, ири этом первая группа контактов реле переключения связана с выходами обоих датчиков, вторая группа контактов - с конечными выключателями, а третья - через источник питания с рабочими органами и приспособлением для перемещения рыбы.
Источник информации, принятый во внимание при экспертизе
1. Патент СССР № 210777, кл. А 22С 25/14, опублик. 1965.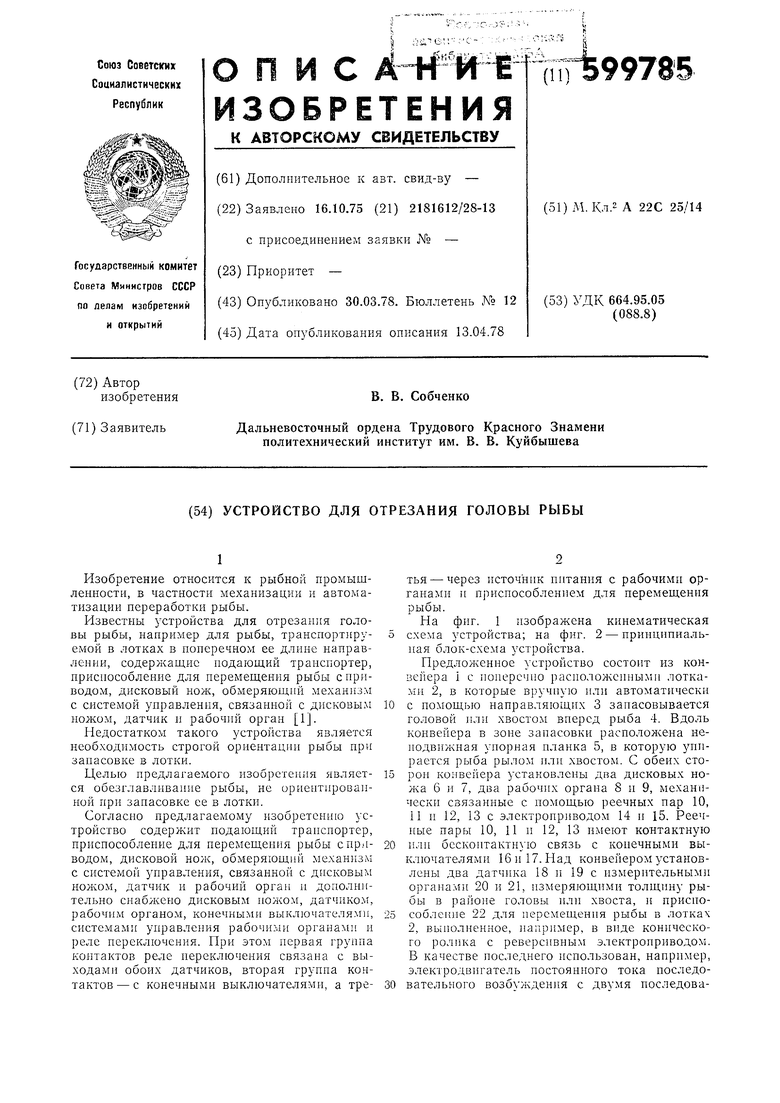
| название | год | авторы | номер документа |
|---|---|---|---|
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU721060A2 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для удаления внутренностей рыбы | 1976 |
|
SU731944A1 |