Изобретение относится к области авиационного приборостроения и может быть использовано в бесплатформенных автономных гировертикалях и курсовертикалях построенных на «грубых» датчиках угловых скоростей и линейных ускорений, предел чувствительности которых лежит выше скорости вращения Земли [1-3].
Известна бесплатформенная система ориентирования, которая содержит три вычислительных навигационных платформы, каждая из которых имеет свой закон управления. Каждая платформа осуществляет демпфирование инерциальных ошибок по собственному закону. Принимающий выходные сигналы платформ мастер-фильтр осуществляет их оптимальную (в среднеквадратическом смысле) обработку (аатент RU №2382988).
Известна бесплатформенная гировертикаль, которая осуществляет измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, при этом обеспечена возможность выполнения вычисления и компенсации ошибок определения углов крена и тангажа при превышении допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат (патент RU №2574379).
Основным недостатком, вышеперечисленных технических решений, является отключение обратной связи управления цифровой платформой при возникновении линейных ускорений. При этом из-за дрейфа гироскопов происходит быстрое накопление недопустимой погрешности. Поэтому работа таких гировертикалей ограничена временем действия линейных ускорений.
Этот недостаток устраняется в автономных бесплатформенных гировертикалях с интегральной коррекцией [4]. Управление цифровой платформой в таких гировертикалях осуществляется по принципу маятника, не возмущаемого линейными ускорениями. Погрешность определения углового положения цифровой платформы, обусловленная ошибками датчиков первичной информации, в такой гировертикале изменяется во времени с периодом Шулера [5] с амплитудой:
- для гироскопов
- для акселерометров


где: ω0, а0 - не скомпенсированные нулевые сигналы гироскопов и акселерометров; ωsch=0,071°/с - угловая частота Шулера; R - средний радиус Земли.
Улучшение точностных характеристик в таких гировертикалях достигается или повышением точности, а, следовательно, и стоимости датчиков первичной информации или путем использования внешней информации, но в этом случае гировертикаль становится неавтономной.
Прототипом заявляемого изобретения является автономная бесплатформенная курсовертикалью с интегральной коррекцией, построенная на базе микромеханических гироскопов и акселерометров [6].
Основным недостатком прототипа является не допустимо высокая погрешность определения углов тангажа и крена при использовании «грубых» датчиков первичной информации. Например, при использовании микромеханических гироскопов MSG1100D-300 китайской фирмы МТ Microsystems, предел чувствительности которых находится на уровне 0,005°/с, превышающем скорость вращения Земли и скорость ее облета, величина нескомпенсированного нулевого сигнала лежит в пределах 0.002 °/c. Это приведет к погрешности определения углов, изменяющейся с периодом Шулера с амплитудой:

То есть амплитуда погрешности измерения углов тангажа и крена составит 0,28 радиан или 16°, что является не допустимой величиной погрешности.
Задачей, на решение которой направлено настоящее изобретение, является сведение к минимуму погрешности измерения углов тангажа и крена в автономной гировертикале с интегральной коррекцией.
Указанный техническая задача решается способом повышения точностных характеристик автономной, бесплатформенной гировертикали с интегральной коррекцией, включающей измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную с формированием матрицы направляющих косинусов, интегрирование и пересчет приращений кажущихся скоростей на инерциальную систему координат, вычисление линейных скоростей в инерциальной системе координат, вычисление угловых скоростей управления цифровой платформой и вычисление углов тангажа и крена путем введения демпфирования при вычислении линейных скоростей в инерциальной системе координат и введения статического усиления при вычислении угловых скоростей управления цифровой платформой.
Также указанная техническая задача достигается благодаря тому, что в бесплатформенную гировертикаль с интегральной коррекцией, содержащую трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов тангажа и крена, блок интегрирования и пересчета приращений кажущихся скоростей на инерциальные оси, блок управления цифровой платформой, состоящий из субблока вычисления линейных скоростей в инерциальной системе координат, субблока вычисления угловых скоростей от погрешностей датчиков и субблока вычисления угловых скоростей управления цифровой платформой, в блок управления цифровой платформой дополнительно введены субблок демпфирования линейных скоростей и субблок статического усиления угловых скоростей от погрешностей датчиков таким образом, что вход субблока демпфирования линейных скоростей подключен к выходу субблока вычисления линейных скоростей в инерциальной системе координат, а выход субблока демпфирования линейных скоростей подключен к входу субблока вычисления угловой скорости от погрешностей датчиков, вход субблока статического усиления угловых скоростей от погрешностей датчиков подключен к выходу субблока вычисления угловых скоростей от погрешностей датчиков, а выход субблока статического усиления угловых скоростей от погрешностей датчиков подключен к входу субблока вычисления угловых скоростей управления цифровой платформой.
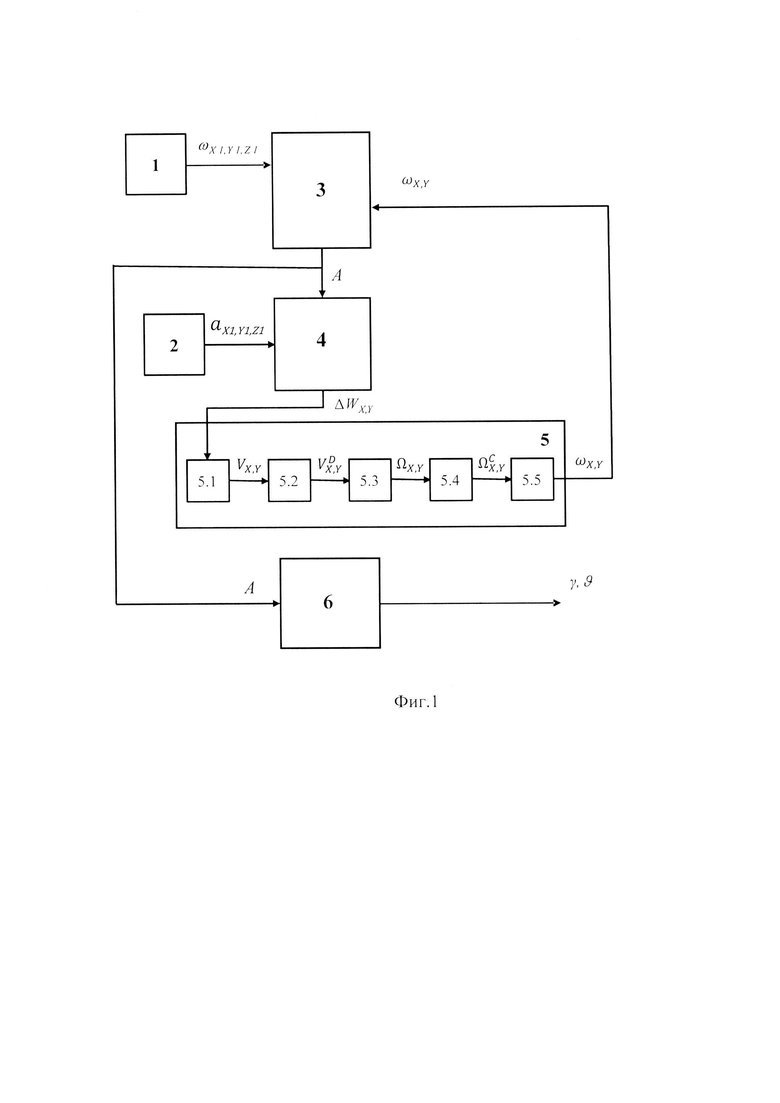
Сущность изобретения поясняется фиг. 1 - структурно-функциональная блок-схема автономной бесплатформенной гировертикали с интегральной коррекцией, где; 1 - трехосный блок датчиков угловых скоростей; 2 - трехосный блок датчиков линейных ускорений; 3 - блок цифровой платформы; 4 - блок интегрирования и пересчета приращений кажущихся скоростей на инерциальные оси; 5 - блок управления цифровой платформой, состоящий из: 5.1 - субблока вычисления линейных скоростей в инерциальной системе координат, 5.2 - субблока демпфирования линейных скоростей, 5.3 - субблока вычисления угловых скоростей от погрешностей датчиков, 5.4 - субблока статического усиления угловых скоростей от погрешностей датчиков; 5.5 - субблока вычисления угловых скоростей управления цифровой платформой; 6 - блок вычисления углов тангажа и крена.
Заявленные способ и устройство работают следующим образом (фиг. 1).
Информация об угловых скоростях в связанной системе координат по трем ортогональным осям летательного аппарата ωx1,y1,z1 передается из трехосного блока микромеханических датчиков угловых скоростей 1 в блок 3 цифровой платформы, в котором производится преобразование приращения углов из связанной системы координат в инерциальную и расчет коэффициентов матрицы направляющих косинусов А. Матрица направляющих косинусов А передается в блок 4 и в блок 6.
В блоке 4 производится интегрирование поступающих из трехосного блока 2 линейных ускорений в связанной системе координат ax1,y1,z1 и пересчет кажущихся линейных скоростей с помощью матрицы направляющих косинусов на инерциальные оси X, Y. Определяемые в процессе пересчета приращения линейных скоростей в инерциальных осях ΔWx,y передаются в блок управления цифровой платформой 5.
В блоке 5 производится вычисление угловых скоростей управления цифровой платформой в инерциальных осях следующим образом. По поступающим из блока 4 приращениям линейных скоростей ΔWx.у в субблоке 5.1 производится подсчет суммарных линейных скоростей на инерциальных осях Vx,y. В субблоке 5.2 производится демпфирование линейной скорости, рассчитанной в блоке 5.1,  В субблоке 5.3 по результатам расчета линейной скорости в субблоке 5.2 производится расчет угловой скорости
В субблоке 5.3 по результатам расчета линейной скорости в субблоке 5.2 производится расчет угловой скорости  вызванной ошибками измерений гироскопов и акселерометров. В субблоке 5.4 производится усиление угловой скорости, рассчитанной в субблоке 5.3,
вызванной ошибками измерений гироскопов и акселерометров. В субблоке 5.4 производится усиление угловой скорости, рассчитанной в субблоке 5.3,  В субблоке 5.5 при пренебрежении скоростью вращения Земли, если гироскопы ее не чувствуют, угловая скорость, рассчитанная в субблоке 5.5, приравнивается к угловой скорости управления цифровой платформой
В субблоке 5.5 при пренебрежении скоростью вращения Земли, если гироскопы ее не чувствуют, угловая скорость, рассчитанная в субблоке 5.5, приравнивается к угловой скорости управления цифровой платформой  Где: R - радиус Земли; KD - коэффициент демпфирования; Kc - коэффициент усиления.
Где: R - радиус Земли; KD - коэффициент демпфирования; Kc - коэффициент усиления.
Угловая скорость управления платформой ωх,у из блока 5 передается в блок цифровой платформы 3, где и производится корректировка углового положения цифровой платформы, рассчитанной по показаниям гироскопов.
В блоке 6, используя передаваемую из блока 3 матрицу направляемых косинусов, производится вычисление углов тангажа ϑ и крена у и выдача их потребителю.
Использование заявленного изобретения позволит более чем на порядок уменьшить амплитуду колебаний угловой ошибки в автономной гировертикале с интегральной коррекцией, вызванной погрешностями датчиков угловых скоростей и линейных ускорений, по сравнению с аналогичной курсовертикалью без демпфирования угловых колебаний и усиления угловой скорости коррекции.
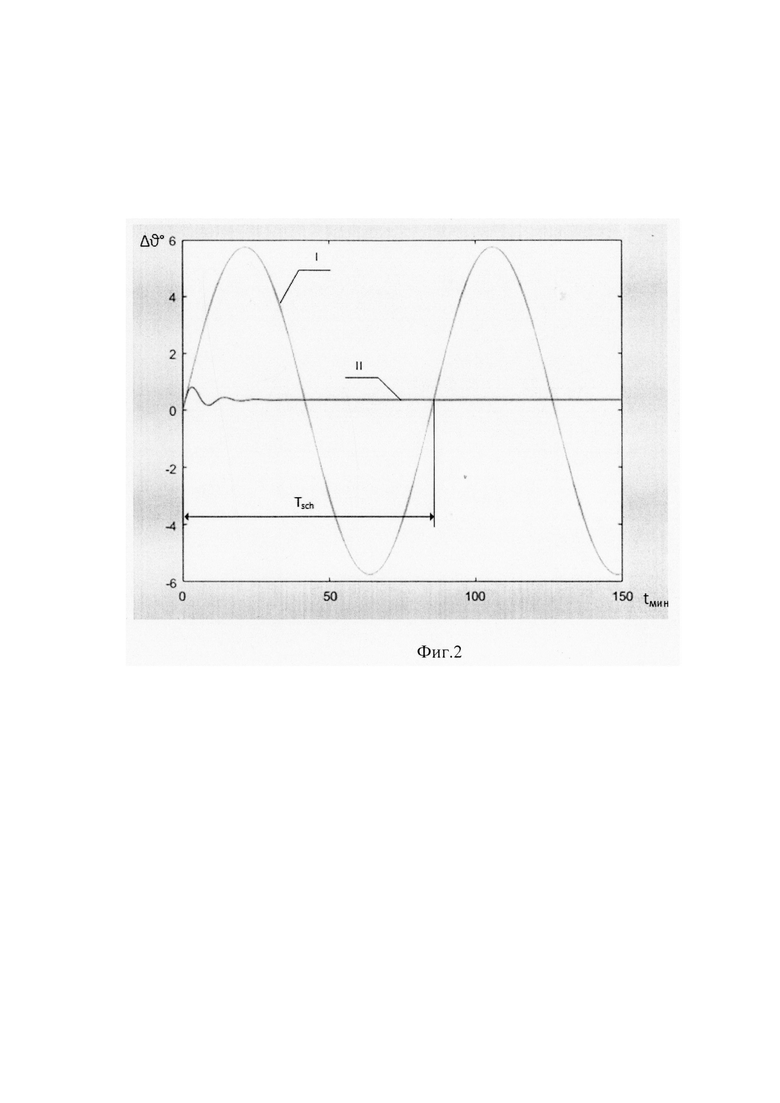
На рисунке фиг. 2 представлены графики изменения погрешности измерения тангажа, автономных гировертикалей с интегральной коррекцией, полученные в результате математического моделирования: I - график гировертикали-прототипа при отсутствии демпфирования и усиления; II - график гировертикали с использованием предлагаемого изобретения. Оба графика построены при одинаковом дрейфе датчика угловых скоростей по оси Z1 - ΔωZ1=0,0071°/c.
Как видно из приведенных графиков, при отсутствии демпфирования, график I, погрешность измерения тангажа измеряется с периодом Шулера с амплитудой, равной  5,7350 - в соответствии с формулой (1), где: TSCH - период Шулера, равный 84,4 мин. [5].
5,7350 - в соответствии с формулой (1), где: TSCH - период Шулера, равный 84,4 мин. [5].
При использовании заявленного изобретения - график II и установке коэффициента демпфирования, равного K^D=0,005 1/с, и коэффициента усиления, равного K^С=54, статическая погрешность уменьшается до 0,30, то есть почти в 20 раз, а динамическая погрешность не превышает 0,40.
Таким образом использование вышеописанных способа и устройства позволяет уменьшить коэффициенты демпфирования и усиления погрешности измерения углов тангажа и крена, вызванные ошибками датчиков первичной информации, что повышает точность пилотирования летательным аппаратом.
Список литературы:
Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор». 2009. - 280 с. ISBN 978-5-900780-73-3
Браславский Д.А. Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматы. Изд. 3-е перераб. И доп. М. Машиностроение, 1978, 432 с.
Кузнецов А.Г., Абутидзе З.С., Портнов Б.И., Галкин В.И., Калик А.А. Микромеханические датчики для пилотажных систем управления // Гироскопия и навигация - 2010, №2(69), с. 50-56.
Голован А.А., Парусников Н.А. Математические основы навигационных систем, ч. I: Математические модели инерциальной навигации. - 3-е изд. испр. доп. - М.: МАКС Пресс, 2011 - 136 с. ISBN 978-50317-03803-
Инерциальная навигация - Анализ и проектирование, под редакцией К.Ф.О/ Доннела, перевод с английского, изд. «Наука», 1969, 592 с.
Кузнецов А.Г., Галкин В.И., Кузин Е.В. Сравнительные характеристики автономных микромеханических курсовертикалей с радиальной и интегральной коррекцией. Труды Московского института электромеханики и автоматики. Вып. 33: Навигация и управление летательными аппаратами. - М.: МИЭА, 2021. - С. 52 - 63.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ С РАДИАЛЬНОЙ КОРРЕКЦИЕЙ И БЕСПЛАТФОРМЕННАЯ ГИРОВЕРТИКАЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2659970C1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ПЛАТФОРМОЙ В БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2667320C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
Изобретение относится к области авиационного приборостроения и может быть использовано в бесплатформенных автономных гировертикалях и курсовертикалях, построенных на «грубых» датчиках угловых скоростей и линейных ускорений, предел чувствительности которых лежит выше скорости вращения Земли. Способ повышения точностных характеристик автономной, бесплатформенной гировертикали с интегральной коррекцией включает измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную с формированием матрицы направляющих косинусов. Затем интегрирование и пересчет приращений кажущихся скоростей на инерциальную систему координат, вычисление линейных скоростей в инерциальной системе координат, вычисление угловых скоростей управления цифровой платформой и вычисление углов тангажа и крена. При вычислении линейных скоростей в инерциальной системе координат вводится демпфирование этих скоростей, а при вычислении угловых скоростей управления цифровой платформой вводится статическое их усиление. Технический результат – повышение точности пилотирования летательным аппаратом за счет уменьшения погрешностей измерения углов тангажа и крена, вызванных ошибками датчиков первичной информации. 2 ил.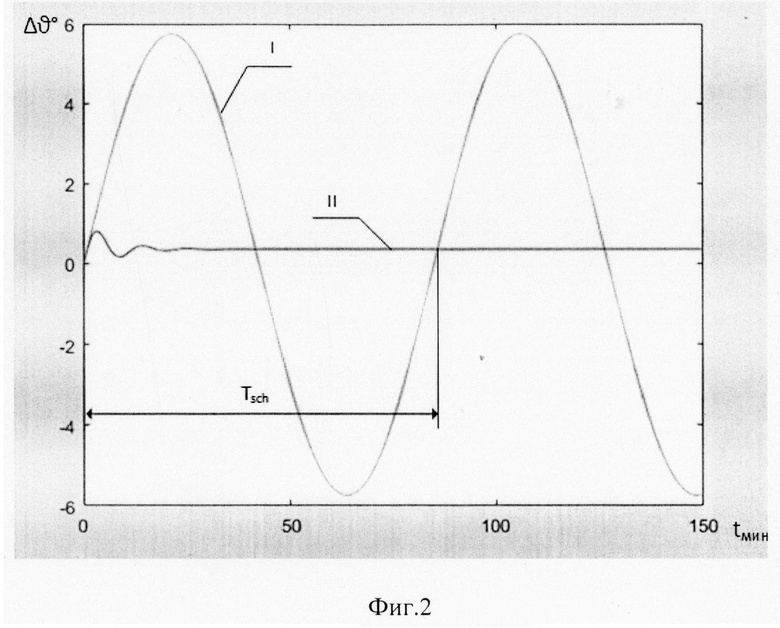
Способ повышения точностных характеристик автономной, бесплатформенной гировертикали с интегральной коррекцией, включающий измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную с формированием матрицы направляющих косинусов, интегрирование и пересчет приращений кажущихся скоростей на инерциальную систему координат, вычисление линейных скоростей в инерциальной системе координат, вычисление угловых скоростей управления цифровой платформой и вычисление углов тангажа и крена, отличающийся тем, что при вычислении линейных скоростей в инерциальной системе координат вводится демпфирование этих скоростей, а при вычислении угловых скоростей управления цифровой платформой вводится статическое их усиление.

