Изобретение относится к области авиационного приборостроения и может быть использовано в бесплатформенных инерциальных системах, в частности в гировертикалях, курсовертикалях и навигационных системах, при измерении углов крена и тангажа подвижного объекта.
Известны бесплатформенные навигационные системы, гировертикали и курсовертикали, описанные в патентах RU 2380656 С1 и RU 2382988 С1, в которых для обеспечения вычисления углов тангажа и крена с необходимой точностью во всех режимах движения объекта используется дополнительная информация о параметрах движения объекта от других источников информации - системы воздушных сигналов или спутниковой навигационной системы. Недостатком таких систем является их неавтономность и большой объем вычислений, требующий вычислителей большой мощности.
Известны бесплатформенные гировертикали с радиальной коррекцией, в которых по показаниям датчиков угловых скоростей с помощью цифровой вычислительной платформы определяется положение летательного объекта в инерциальной системе координат, а восстановление местной вертикали при движении объекта по сфере Земли осуществляется по показаниям акселерометров, измеряющих составляющие ускорения силы тяжести при равномерном движении объекта [1-3].
Недостатком таких гировертикалей является большая погрешность в определении углов крена и тангажа при разгонах и торможениях подвижного объекта, так как в этом случае акселерометры измеряют кажущееся ускорение, включающее в себя как составляющую от ускорения силы тяжести, так и составляющую ускорения от внешних сил (разгонных двигателей, центростремительных сил при координированных разворотах и виражах), воздействующих на подвижный объект.
Прототипом заявленного изобретения является способ управления бесплатформенной гировертикалью с радиальной коррекцией (патент RU 2348903 С1), включающий измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат.
Реализация способа управления бесплатформенной гировертикалью с радиальной коррекцией по прототипу включает в себя трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок перерасчета линейных ускорений из связанной системы координат в инерциальную систему координат, блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включении управления цифровой платформой при уменьшении линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой [3].
Основной недостаток такого способа управления заключается в том, что, при разгонах и торможениях объекта, координированных разворотах и виражах вследствие отключения обратной связи по управлению происходит нарастание ошибок определения углов крена и тангажа, вызванных дрейфом датчиков угловых скоростей.
Задачей изобретения является обеспечение возможности компенсации дрейфа гироскопа при отключенной обратной связи,
Технический результат заключается в повышении точности определения углов ориентации.
Указанный технический результат достигается способом управления бесплатформенной гировертикалью с радиальной коррекцией, включающим измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, а вычисление и компенсацию ошибок определения углов крена и тангажа цифровой платформы при превышении допустимых для управления величин ускорений в инерциальной системе координат осуществляют по угловым скоростям, определенным в инерциальной системе координат в процессе запуска датчиков угловых скоростей.
Также технический результат достигается бесплатформенной гировертикалью с радиальной коррекцией, содержащей чувствительные элементы в виде трехосного блока микромеханических датчиков угловых скоростей, соединенного выходом с первым входом блока цифровой платформы, а также трехосного блока микромеханических датчиков линейных ускорений, соединенного выходом с первым входом блока пересчета линейных ускорений из связанной системы координат в инерциальную систему координат, соединенного вторым входом с первым выходом блока цифровой платформы, а выходом связанного с блоком управления цифровой платформой, который соединен своим первым выходом со вторым входом блока цифровой платформы, при этом блок цифровой платформы соединен своим вторым выходом со входом блока вычисления углов крена и тангажа, причем, дополнительно введены блок запоминания угловых скоростей в инерциальной системе координат в момент запуска датчиков угловых скоростей и блок сравнения линейных ускорений в инерциальной системе координат с допустимыми для управления цифровой платформой линейными ускорениями в инерциальной системе координат таким образом, что блок запоминания угловых скоростей в инерциальной системе координат входом соединен со вторым выходом блока управления цифровой платформой, а выходом соединен с первым входом блока сравнения линейных ускорений в инерциальной системе координат, который соединен вторым входом с выходом блока пересчета линейных ускорений из связанной системы координат в инерциальную систему координат, первым выходом соединен, а вторым выходом соединен со входом блока управления цифровой платформой с третьим входом блока цифровой платформы.
Сущность изобретения поясняется чертежом, на котором представлена структурно-функциональная блок-схема бесплатформенной гировертикали, реализующей способ управления бесплатформенной гировертикалью с радиальной коррекцией.
В соответствии с чертежом бесплатформенная гировертикаль с радиальной коррекцией содержит чувствительные элементы - трехосный блок 1 микромеханических датчиков угловых скоростей (гироскопов), трехосный блок 2 микромеханических датчиков линейных ускорений (акселерометров), а также блок 3 цифровой платформы, блок 4 вычисления углов крена и тангажа, блок 5 пересчета линейных ускорений из связанной системы координат в инерциальную систему координат, блок 6 управления цифровой платформой, блок 7 запоминания угловых скоростей в инерциальной системе координат в момент запуска датчиков угловых скоростей и блок 8 сравнения линейных ускорений в инерциальной системе координат с допустимыми для управления цифровой платформой линейными ускорениями в инерциальной системе координат. Блок 1 соединен выходом с первым входом блока 3. Блок 2 соединен выходом с первым входом блока 5, соединенного вторым входом с первым выходом блока 3. Блок 8 соединен первым выходом с третьим входом блока 3, а вторым выходом со входом блока 6, который своим первым выходом соединен со вторым входом блока 3, а вторым - со входом блока 7, соединенного выходом с первым входом блока 8, вторым входом соединенного с выходом блока 5. Блок 3 вторым выходом соединен со входом блока 4.
Заявленный способ и устройство работают следующим образом.
Информация об угловых скоростях в связанной системе координат по трем ортогональным осям летательного объекта передается из трехосного блока 1 микромеханических датчиков угловых скоростей в блок 3 цифровой платформы, в котором производится преобразование приращения углов из связанной системы координат в инерциальную и расчет коэффициентов aN матрицы направляющих косинусов. Коэффициенты матрицы aN направляющих косинусов передаются в блок 4 и в блок 5.
В блоке 4 по коэффициентам матрицы направляющих косинусов рассчитываются углы крена (γ) и тангажа (ϑ) летательного объекта в инерциальной системе координат.
Информация о линейных ускорениях в связанной системе координат по трем ортогональным осям летательного объекта передается из трехосного блока 2 микромеханических датчиков линейных ускорений в блок 5.
В блоке 5 по информации об угловом положении цифровой платформы, поступающей из блока 3 в виде коэффициентов aN матрицы направляющих косинусов, производится пересчет линейных ускорений из связанной системы координат в инерциальную систему координат.
Результаты расчета в виде проекций ускорений на инерциальные оси Ах,у передаются из блока 5 в блок 8.
В блоке 8 осуществляется анализ текущего значения Ах,у с заданным граничным Аг. В случае, когда текущее инерциальное ускорение меньше или равно граничному Ах,у≤Аг, его значение передается в блок 6.
В блоке 6 реализуется закон управления цифровой платформой с расчетом угловой скорости  , корректирующей положение цифровой платформы по перекрестным инерциальным осям:
, корректирующей положение цифровой платформы по перекрестным инерциальным осям:

где kу - коэффициент усиления сигнала управления.
Сформированный в блоке 6 корректирующий сигнал , передается в блок 3, где будет скомпенсирована ошибка углового положения цифровой платформы.
В блоке 7 в процессе запуска гироскопа при неподвижном летательном аппарате вычисляется и запоминается значение корректирующей угловой скорости в виде нулевого сигнала ω0ху в инерциальной системе координат, поступающей из блока 6.
Если в блоке 8 инерциальное ускорение (Ах,у) больше, чем граничное (Аг), - Ах,у>Аг, то в блок 3 передается значение ω0ху, вычисленное в блоке 7 в процессе запуска гироскопов.
Таким образом, использование заявленного изобретения обеспечит компенсацию нулевого сигнала после отключения обратной связи, что приведет к увеличению точности определения углов ориентации.
Например, при использовании датчиков фирмы Analog Devices с дрейфом нулевого сигнала 0,055°/с в случае отключения обратной связи на 100 секунд накопленный угол составит 5,5° [4]. При использовании изложенного способа данная ошибка будет скомпенсирована.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Гироскопические системы, ч. II. Гироскопические приборы и системы. Под ред. Д.С. Пельпора. Учебное пособие для вузов по специальности «Гироскопические приборы и устройства». М., «Высшая школа», 1971, с. 488 (Механические гировертикали с радиальной коррекцией).
2. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматы. Изд. 3-е перераб. и доп. М., машиностроение, 1978, с. 432.
3. Машнин М.Н. Компенсация ускорений, действующих на систему ориентации на борту малоразмерного беспилотного летательного аппарата, Сборник трудов XIV конференции молодых ученых «Навигация и управление движением». 13-16 марта, 2012 г. С-Петербург.
4. Analog Devices, Datasheet ADXRS649, Rev. В 23.02.2017.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ПЛАТФОРМОЙ В БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2667320C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2615033C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |

Изобретение относится к области авиационного приборостроения и может быть использовано в бесплатформенных инерциальных системах, в частности в гировертикалях, курсовертикалях и навигационных системах, при измерении углов крена и тангажа подвижного объекта. Способ управления бесплатформенной гировертикалью с радиальной коррекцией включает измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат. При этом вычисление и компенсацию ошибок определения углов крена и тангажа цифровой платформы при превышении допустимых для управления величин ускорений в инерциальной системе координат осуществляют по угловым скоростям, определенным в инерциальной системе координат в процессе запуска датчиков угловых скоростей. Для реализации способа в бесплатформенную гировертикаль с радиальной коррекцией, содержащую блок датчиков угловых скоростей, блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок пересчета линейных ускорений из связанной системы координат в инерциальную, блок управления цифровой платформой, дополнительно введены блок запоминания угловых скоростей в инерциальной системе координат в момент запуска датчиков угловых скоростей и блок сравнения линейных ускорений в инерциальной системе координат с допустимыми для управления цифровой платформой линейными ускорениями в инерциальной системе координат таким образом, что вход блока запоминания угловых скоростей соединен с выходом блока управления цифровой платформой, один вход блока сравнения линейных ускорений в инерциальной системе координат соединен с выходом блока запоминания угловых скоростей в инерциальной системе координат, а другой - с выходом упомянутого блока пересчета линейных ускорений, один выход упомянутого блока сравнения линейных ускорений соединен с входом блока управления цифровой платформой, а другой - с входом блока цифровой платформы. Технический результат заключается в повышении точности определения углов ориентации. 2 н.п. ф-лы, 1 ил.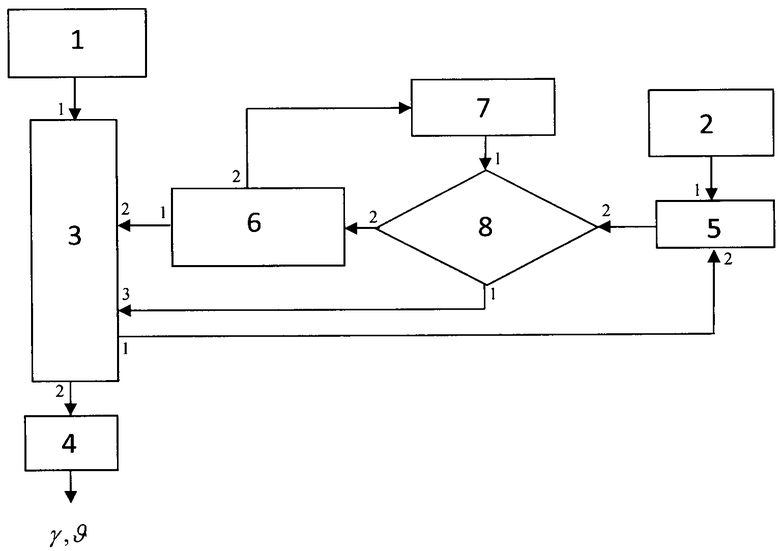
1. Способ управления бесплатформенной гировертикалью с радиальной коррекцией, включающий измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, отличающийся тем, что вычисление и компенсацию ошибок определения углов крена и тангажа цифровой платформы при превышении допустимых для управления величин ускорений в инерциальной системе координат осуществляют по угловым скоростям, определенным в инерциальной системе координат в процессе запуска датчиков угловых скоростей.
2. Бесплатформенная гировертикаль с радиальной коррекцией, содержащая чувствительные элементы в виде трехосного блока микромеханических датчиков угловых скоростей, соединенного выходом с первым входом блока цифровой платформы, а также трехосного блока микромеханических датчиков линейных ускорений, соединенного выходом с первым входом блока пересчета линейных ускорений из связанной системы координат в инерциальную систему координат, соединенного вторым входом с первым выходом блока цифровой платформы, а выходом связанного с блоком управления цифровой платформой, который соединен своим первым выходом со вторым входом блока цифровой платформы, при этом блок цифровой платформы соединен своим вторым выходом с входом блока вычисления углов крена и тангажа, отличающаяся тем, что дополнительно введены блок запоминания угловых скоростей в инерциальной системе координат в момент запуска датчиков угловых скоростей и блок сравнения линейных ускорений в инерциальной системе координат с допустимыми для управления цифровой платформой линейными ускорениями в инерциальной системе координат таким образом, что блок запоминания угловых скоростей в инерциальной системе координат входом соединен со вторым выходом блока управления цифровой платформой, а выходом соединен с первым входом блока сравнения линейных ускорений в инерциальной системе координат, который соединен вторым входом с выходом блока пересчета линейных ускорений из связанной системы координат в инерциальную систему координат, первым выходом соединен с третьим входом блока цифровой платформы, а вторым выходом соединен с входом блока управления цифровой платформой.
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| WO 2013037034 A1, 21.03.2013. | |||

